Bushfires are unplanned fire events or disasters that occur in forests, heavy vegetated, and wildland regions. These have been a constant disturbance source for about 400 million years in various parts of the world. Bushfires are a frequent, recurrent, and devastating environmental hazard that can result in adverse environmental, social, and economic impacts, affecting all sustainability pillars [
1,
2,
3]. In the era of increased demand for sustainability, savings of natural resources, and increased reliance on digital technologies for disaster management, it is imperative to develop technology-based solutions for handling bushfires [
4,
5,
6]. Bushfires are attributed to several factors ranging from climatological causes to anthropogenic causes. Bushfires are not entirely undesired; sometimes, they are needed and planned events and play an important role in a region’s ecological landscaping. However, unplanned and uncontrolled bushfires cause devastation, wiping out forests, wild animals and impacting agricultural land. Thus, it is a matter of controlled vs uncontrolled bushfires that shape their outlook. Raucous fire events have adverse and severe impacts on the environment, economy, and society. Whether controlled or uncontrolled, bushfires significantly affect the physical environment, such as land use, land cover, biodiversity, forest ecosystem, and global warming. Therefore, monitoring the bushfires is essential to understand the impact of these events in line with the goals of smart and sustainable societies and countries.
Contrary to other natural hazards like earthquakes and volcanic eruptions, the bushfire phenomenon is considered an avoidable risk [
7,
8,
9,
10]. Accordingly, significant resources are expended on bushfire suppression activities in developed countries such as Australia. However, fire suppression strategies may increase the risk of more extreme and extensive fire incidents within the fire-susceptible regions [
11].
Table 1 provides a list of global bushfire events since 2000. The data is compiled by the authors of the current study from the EMDAT 2019 report [
12]. Since 2000, the average number of deaths due to reported bushfire events is around 138 per fire. Further, the affectees and total damages average out
$77,242 and
$3,710,000, respectively.
Australia is a developed country and enriched with biodiversity and natural ecosystems. However, it is also prone to various environmental hazards such as bushfires due to the diverse landscape. It is considered the fourth most devastating natural hazard [
13]. Bushfires are of critical concern in Australia since its southern coastal region has a Mediterranean-type climate characterized by hot, dry summers and cold, wet winters, increasing the chances for bushfire events. These bushfires threaten human life and result in significant economic loss, thus impacting Australia’s sustainable development dreams. It has been reported that bushfires are responsible for 20% of property losses, killing 1.25 billion animals and burning over a billion trees in Australia [
14,
15]. The fires have damaged 10 million hectares of land, equivalent to 21 million acres across the six Australian states [
16]. It has been predicted that future bushfires may become fatal and severe in Australia. Of the concerned areas, the southeastern parts of the continent are at greater risk. These are forecasted to be at “very high” and “extreme” dangers of bushfires [
17]. A large area of significant positive pattern for bushfires includes southeastern South Australia (SA), western New South Wales (NSW), Victoria (VIC), and northern Tasmania (TAS). The forest fire danger index (FFDI) trend is significantly increased along the mainland’s southern regions, specifically in VIC, NSW, and SA in 2020. The area is densely populated with reserved areas of national parks, making it a good target for bushfires.
1.1. Victorian Bushfires
The state of VIC is susceptible to bushfire hazards traditionally. VIC is particularly prone to drought conditions that aggravate the issue of bushfires in this state. For instance, the Black Saturday fires of 2009 started due to extreme drought conditions in the earlier months [
18]. The most recent and by far the deadliest fire events recorded in VIC are the Black Summer Fires of 2019–2020. These bushfires have resulted in 34 fatalities, affected over 1.5 million hectares of Australian land, killed millions of wild animals, and destroyed 9352 buildings, including 2800 homes. VIC is of critical importance in terms of environmental deterioration due to recurrent bushfires in southeastern Australia. The region has experienced some of the most severe and catastrophic bushfire events in Australian history, such as Black Summer, Red Hill, Black Saturday, and others.
Table 2 illustrates some of the most extensive and devastating bushfires in this region in the last century. The recent fire seasons are alarming as each latest fire season is becoming progressively dangerous with more ecological and economic disturbance. The Black Saturday fire season of 2009 affected Kinglake-Marysville, Beechworth, Bendigo, Redesdale, and Gippsland. It was one of Australia’s all-time deadliest bushfire disasters. The fires started during the severe bushfire weather conditions and resulted in the country’s highest-ever human life losses due to fires, with 173 deaths. About 400 individual fire incidents were reported on Saturday, 7 February 2009, referred to as Black Saturday. Afterward, the Australian bushfire season of 2010–11 was observed along eastern Australia, attributed to a strong climatic phenomenon of the La Nina effect. It resulted in severe floods, particularly in Queensland and VIC. Because of these drastic weather conditions, most of the fire events occurred in Western and South Australia, where fire incidents occurred in Gippsland and eastern VIC. Thirty-four lives were lost to these fire events, and more than 90 buildings were damaged.
VIC is selected as the case study due to its frequently occurring bushfire events. It has a land cover of 237,659 km
2 and is the second most densely populated Australian state with an average population of 26.56 per km
2. Of the total land cover, the land encompasses 227,436 km
2, whereas about 10,213 km
2 is covered by water. VIC comprises diverse geographical features and climates ranging from temperate coastal and central regions to the northeastern VIC Alps and semi-arid northwestern region. The upper Wimmera and Mallee are the warmest regions with hot winds originating from adjacent semi-deserts. The average temperature often exceeds 32 °C in the summer and 15 °C in winter. The northeastern VIC Alps are the coldest VIC region, where the average temperatures are below 9 °C during winter and below 0 °C in the mountaineous ranges [
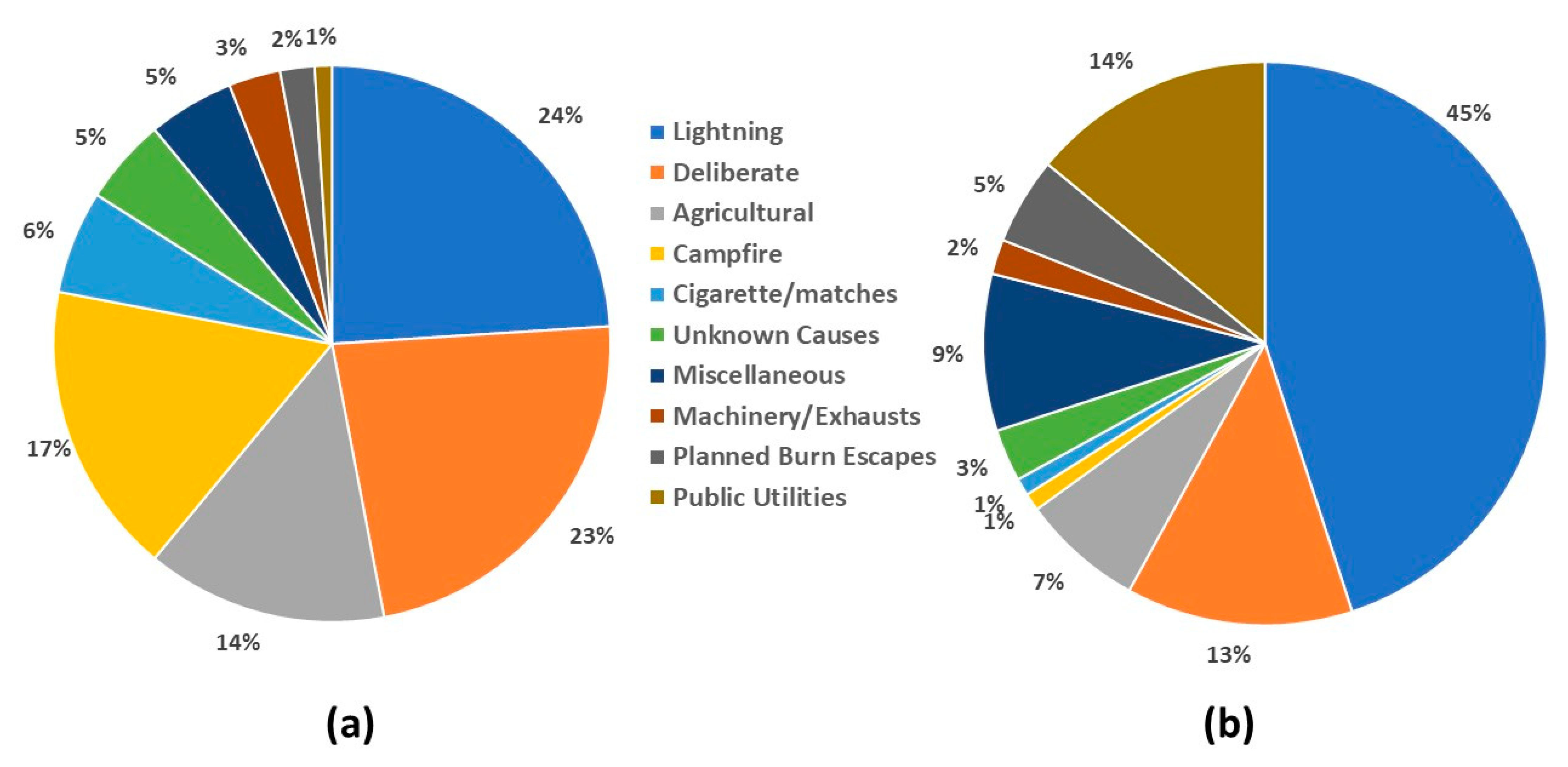
19]. The majority of VIC population is in the central south, surrounded by Port Phillip Bay and the metropolitan region of Greater Melbourne. As per the VIC Department of Sustainability and Environment (DSE), in the past 20 years, most Australian fires are majorly attributed to lightning or deliberately caused by humans.
Figure 1 reports that about 24% of the fires are caused by lightning, followed by anthropogenic causes, including deliberate (23%) and campfires (17%), respectively. In terms of the burnt areas, lightning-based fires have a 45% contribution, followed by misuse of public utilities (14%), deliberate fires (13%), and agricultural (7%) reasons.
The 2019–2020 Victorian Bushfires Impacts
The initial causes of the 2020 VIC bushfires are reported to be lightning strikes, accidents, and alleged arson [
20,
21,
22]. However, the propagation of the 2020 bushfire is more intense and deep-rooted. It includes global warming, record-breaking temperatures, drought conditions, and an Indian Ocean Dipole (IOD) [
23,
24]. Of the total national death toll of 34, five were from the VIC bushfire. Regarding the property damage, almost 300 houses were damaged [
25]. In terms of the diversity loss, it has been reported that 170 species are impacted: comprising 19 mammalian species, 13 amphibian species, ten reptilian species, nine bird species, 29 aquatic species, and 38 plant species [
26].
VIC has been known as one of the most bushfire-prone areas in the world, particularly in Australia. The reasons for this are attributed to a relatively simple landscape climate and vegetation, settlement, weather, and population. VIC has the undesirable record of being the deadliest bushfire-affected state in Australia. As a result, more people have died in VIC bushfires than in any other state or territory in Australia. VIC has recorded more fatalities than any jurisdiction from 1900 till 2008. These were nearly three times more than NSW, the next highest. Since then, VIC has sustained a further 183 bushfire deaths adding more toll to the state’s burden. These include 173 deaths in 2009 and nine between 2010 and 2020, bringing 479 deaths or 61 percent of the national fatality toll since 1900.
According to the United States Environmental Protection Agency’s National Ambient Air Quality Standard, the worst air pollution was recorded on 13 and 14 January 2020 in VIC. The air quality scores for these days have been 212 and 255, respectively, representing ‘very unhealthy’ on the scale of air quality index (AQI) [
27]. Although the bushfire’s cost estimates are not confirmed yet by the VIC and federal governments, climate criminologist Paul Read and economist Richard Dennis regarded it to be Australia’s costliest natural disaster to date. The Black Summer Fires are alarming due to their direct impacts; however, the indirect effects also contributed to many problems, such as the too high temperatures putting human and wild lives at risk. The associated fire and smoke created severe local weather and posed dangers to life, raising concerns for the residents and emergency response authorities [
23]. Once the event starts, all adjacent areas are at risk of experiencing its aftermath. One thousand three hundred five patients presented to emergency departments with asthma due to the 2020 VIC bushfires [
28].
Owing to these damages and the ever-hovering danger of another bushfire in the VIC region, a bushfire mitigation strategy or instant emergency response mechanism must be devised to assess and manage these fires. Various tools such as GIS and remote sensing are proposed to assess bushfire’s impacts and associated disaster management response [
29,
30]. Notably, in the post-disaster period, the disaster relief agencies’ focus is on locating and reaching the stranded people to rescue them [
4,
31,
32]. However, in many cases, the number of sites to be visited for this purpose is very high. Due to limited time in emergency responses and limited resources, it is practically impossible to reach all the sites in an affected region immediately. Such a situation can lead to an additional number of fatalities if a well-defined mechanism is not followed. The expenses related to vehicles and transportation to the disastrous locations make up a considerable part of a disaster relief organization’s overall expenditures. A significant portion of these expenses consists of costs of services like locating, transporting the affectees and managing the fires. The limited vehicles, human resources, instant emergency response, and other limiting factors intensify the bushfire’s damages. Costs reduction for emergency responses, determining a proper route for vehicles, and locating the target sites are the key decisions for instigating an adequate emergency response plan [
30,
32,
33]. Accordingly, these factors should be considered while planning an appropriate plan of response.
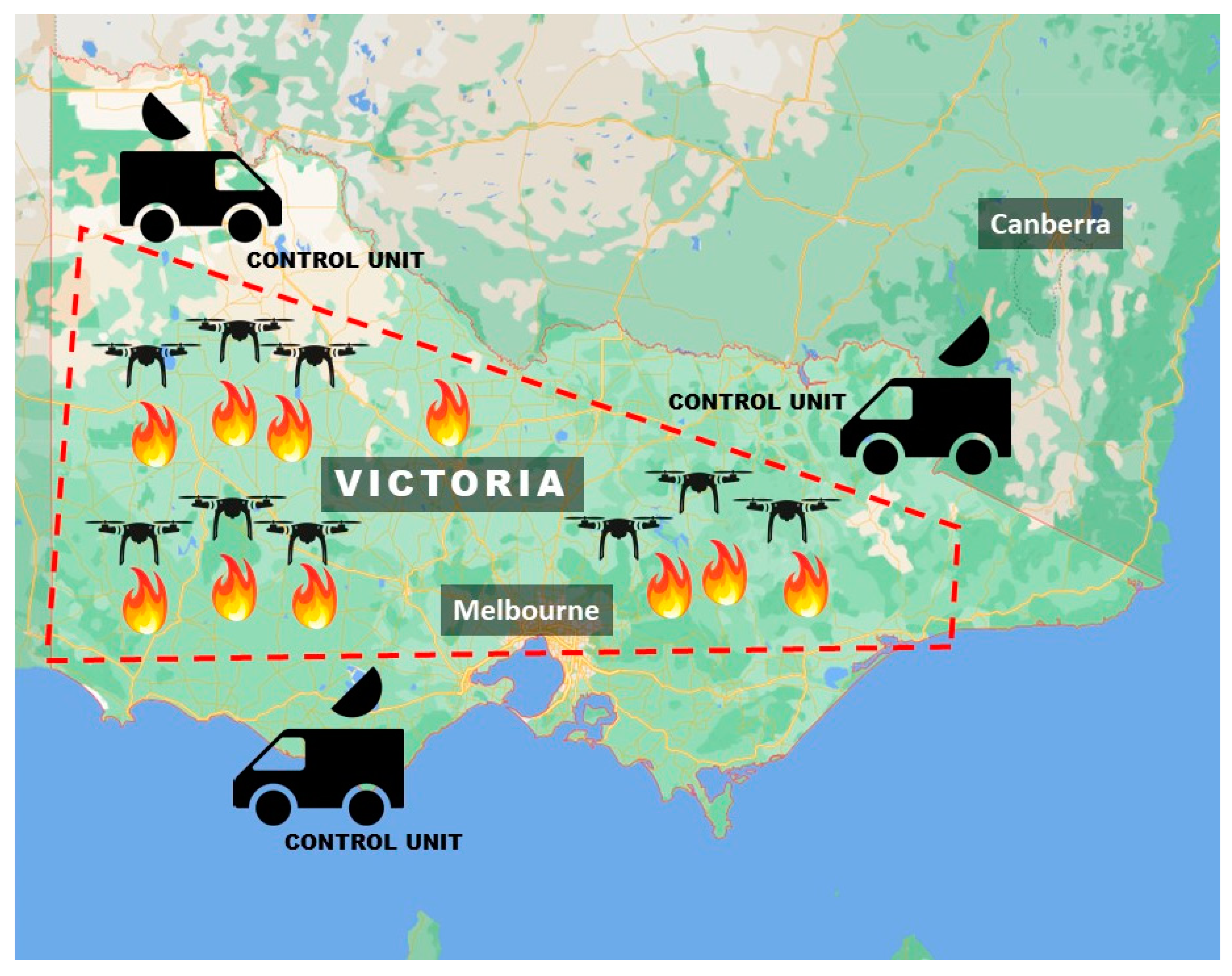
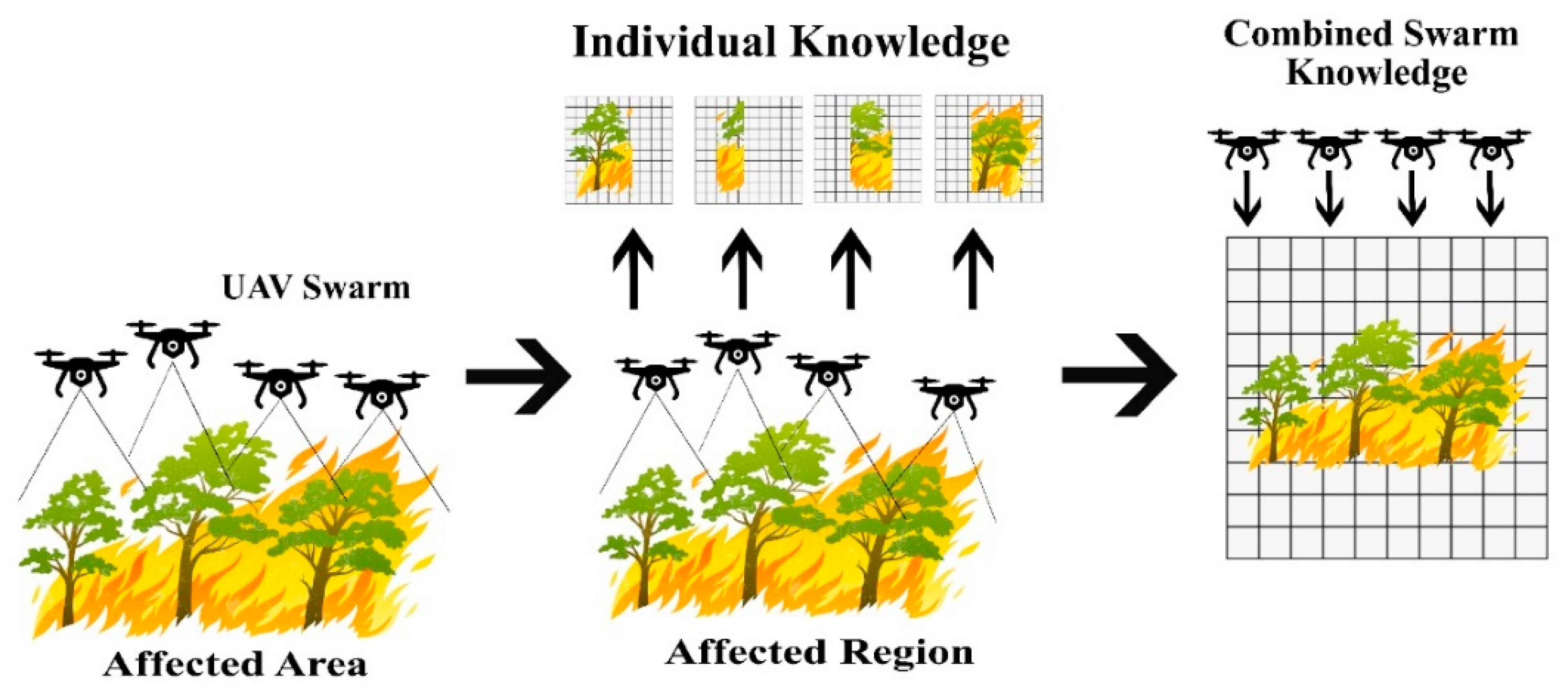
Further, many roads, bridges, and paths for vehicles are damaged, blocked, or destroyed due to bushfires or other associated emergencies that make road-based response planning very difficult in the post-disaster scenario. Also, the bushfires damages may destroy the telecommunication system resulting in loss of internet services, leading to the unavailability of technologies like GPS and GIS. This calls for a need to devise a system that would automatically find the shortest possible route to the affected area to address each bushfire site. A key advantage of this system is its non-dependency on the telecommunication infrastructure, where the swarm can create their own communication network and share real-time information to the communication vans or stations situated at a safe distance to instigate proper and immediate response plans. Accordingly, a UAV-based bushfire assessment and mitigation system are devised in the VIC region in the current study. Therefore, this study proposes a UAV-based bush fire assessment and mitigation system using GIS-based tools and remote sensing. Initially, the mapping of the bushfire areas and hotspot detection is carried out using the GIS and remote sensing. After gathering the preliminary data, the UAV swarm is assigned to the affected area to expedite the disaster response plan through damage assessment, locating the best optimized routes to and from the depot, and generating a map of the region. The study also aims to optimize UAV allocation by reducing the distance between the source and target area, thus reducing travel time.
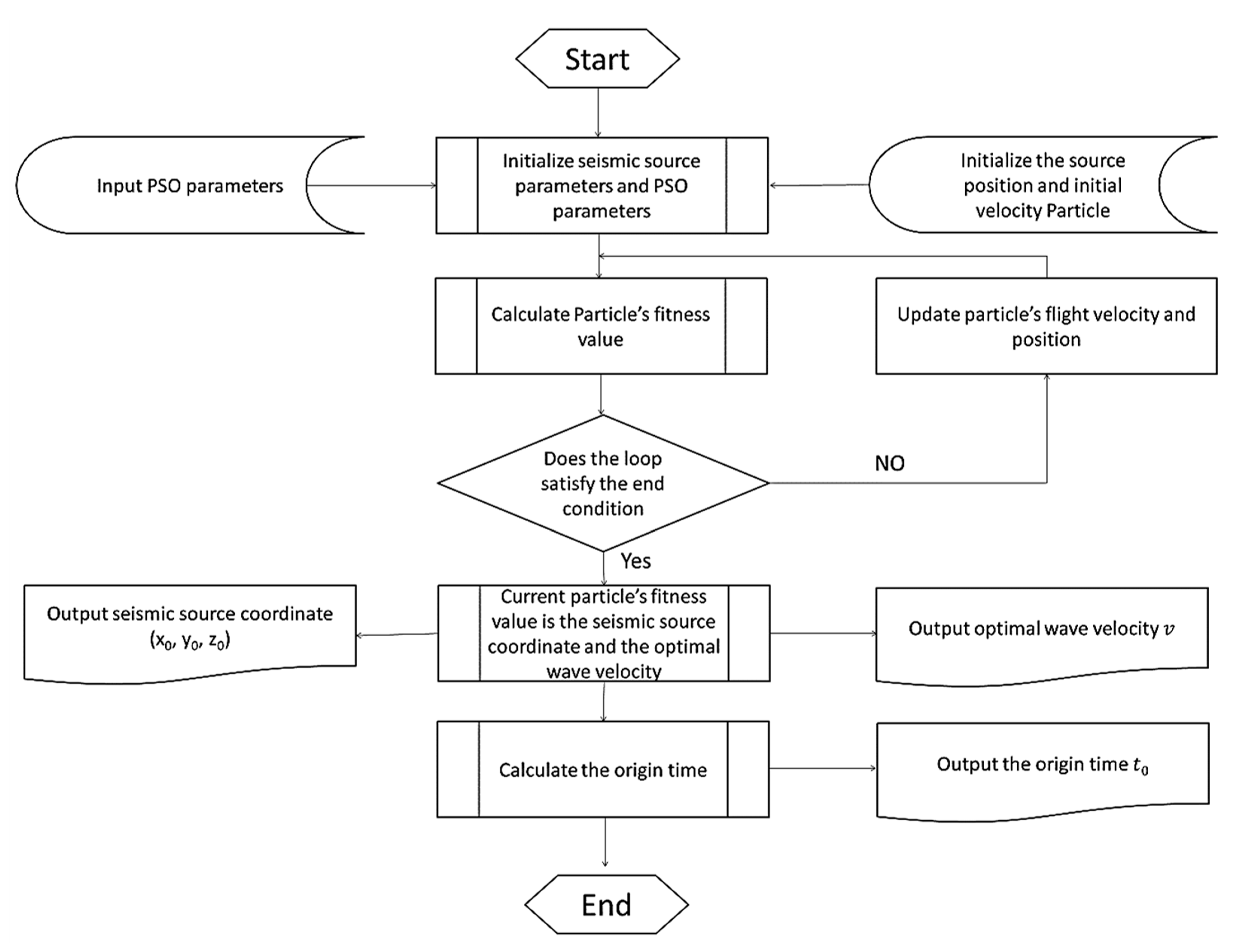
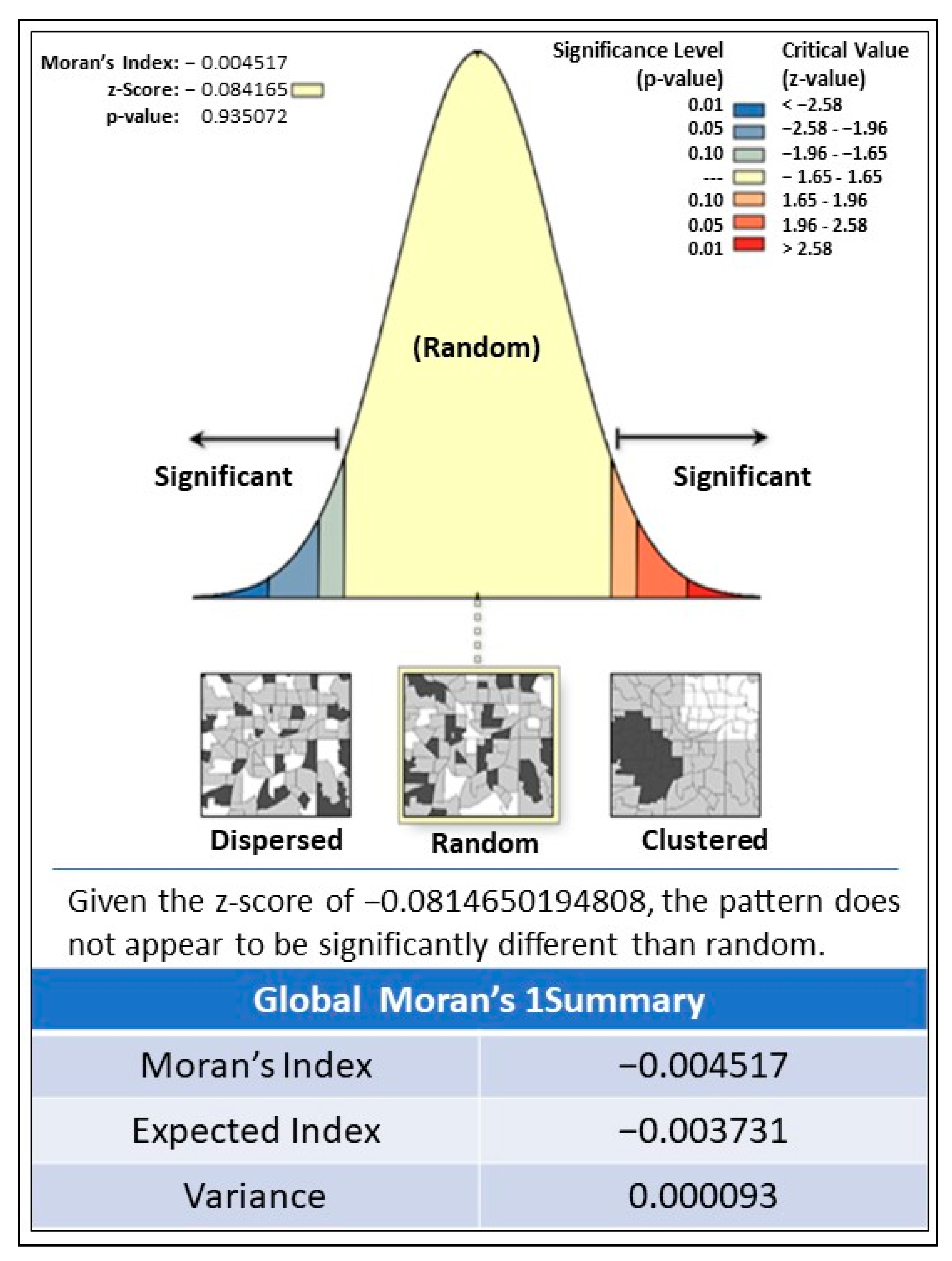
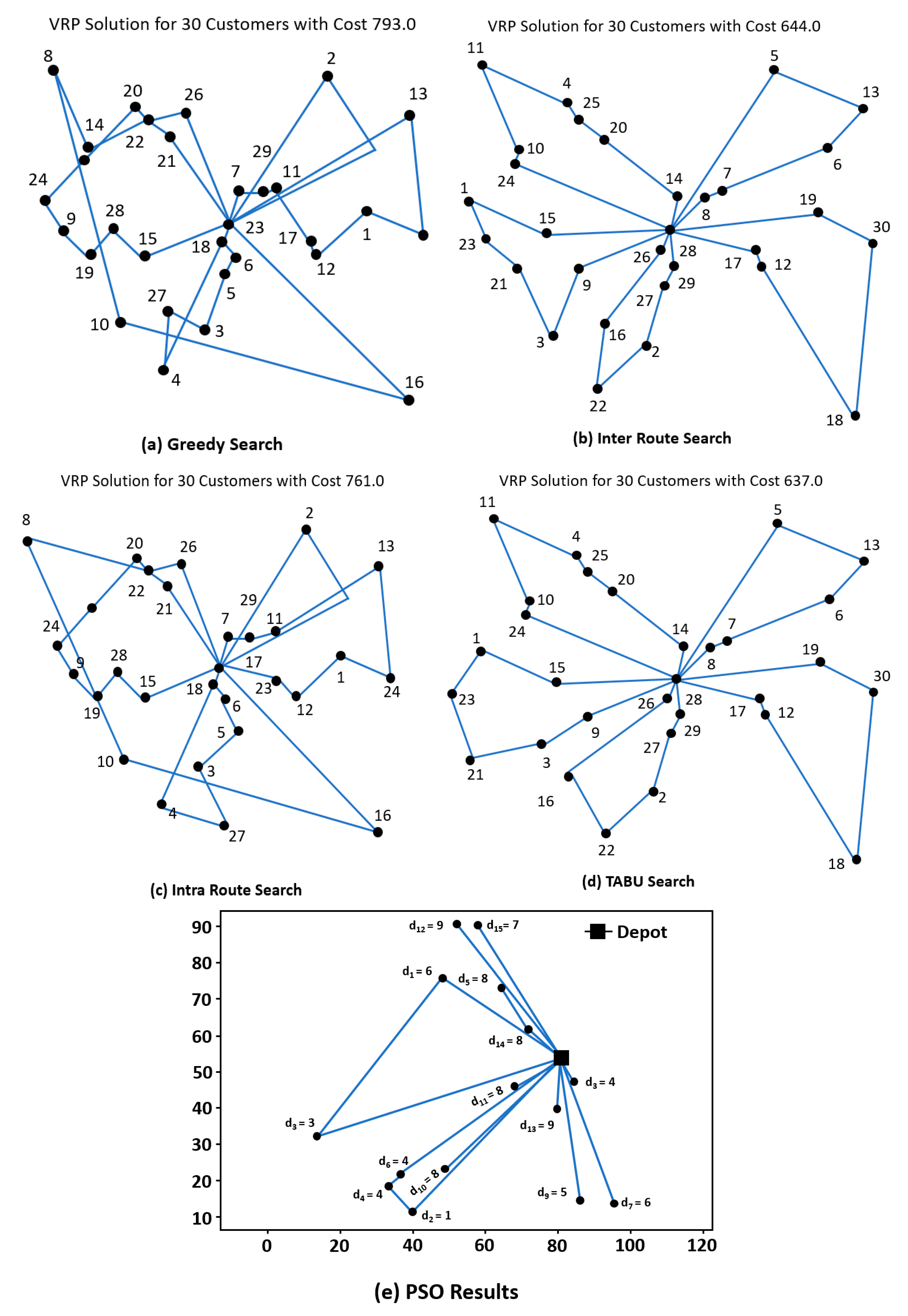
Overall, data is collected for mapping, scanning, and hotspot detection using Getis-Ord General G Analysis for the VIC region in the current study. Based on this analysis, the extent and impact of the bushfire are evaluated. A mathematical model is developed using particle swarm optimization (PSO) for the UAV maximum area coverage, the shortest path to the disaster location, and minimize the time to perform the assigned task. Different algorithms such as tabu, greedy, intra-route, and inter-route are evaluated to find the shortest route to the disaster location. The performance of these algorithms is compared to the PSO, and the best solution is used for UAV path planning.
1.2. Causes of Bushfires
A combination of edaphic, human, and climatic factors contributes to the bushfires. High terrain steepness coupled with elevated summer temperature, increased wind velocity, and fuel availability on the forest floors or bushlands usually result in significant damage and widespread fires. It has been reported that anthropogenic causes greatly enhance the fire intensity, contributing almost 75% to the propagation of the bushfire [
34]. However, the natural causes of bushfires are higher than human-initiated fires. Many wildfires are intentionally lit for land conversion, harvesting, slash and burn agriculture, social and economic conflicts, land use, and property rights. These include anthropogenic activities, climate change, landscape, and combustible fuel. The bushfires are mostly a direct or indirect consequence of anthropogenic activities [
35]. The urban settlements or agricultural production sites are usually adjacent to the forests. The cultivation burning creates a budding site for the onset of bushfires, as the burning is not regulated periodically. The common anthropogenic causes of bushfires include burning agricultural lands, hunting wildlife, or harvesting honey through smoke [
36]. Climate changes are also linked to bushfire events. The fire events are closely linked with the weather conditions, both prevalent and antecedent. The fire risk index (FRI) is strongly influenced by air temperature, wind speed, and relative humidity [
37,
38]. The next cause of bushfires is the landscape, including the slope, aspect, elevation, and curvature. This complexity of terrain mainly impacts the changes in fuel and atmospheric circumstances. Slope angles of 15–20 °C are favorable conditions for propagating fire hazards. The surface elevation influences fire response and behavior [
39]. The other reported cause of bushfires is the presence of combustible fuel. It is an essential component of the fire triangle. This factor affects the flammability, size, and intensity of the fire. Fuel refers both to the fuel state and fuel type. The fuel state describes the fuel’s moisture content or the plant’s status: decayed or alive. The fuel type comprises the physical features of the fuel and its composition. The fuel’s physical component influences fuel burns, including frequency, size, alignment, and material arrangement [
40]. The most critical impact of moisture on fire is the influence of steam from burning fuel, which minimizes the amount of available oxygen and its combustion.
1.3. Bushfire Management with Advanced Tools
Effective bushfire risk management and minimizing its damage are essential for long-term bushfire management planning and strategy development to achieve a smart and sustainable planet and societies [
41]. Various technologies have been used and their applications investigated in such endeavors [
42,
43,
44,
45]. Subsequently, identifying bushfire areas in the region is the foremost priority for environmental protection agencies. Once the areas prone to bushfires are identified, a detailed analysis of potential hazards is prepared using appropriate tools, knowledge, and planning. Remote sensing and GIS emerge as two key candidates for such management [
36,
41]. Accordingly, bushfire hazard models for respective regions considering the topography or environmental factors influencing the fires have been prepared. The spread of fires is broadly attributed to fuel moisture, fuel type, weather conditions, and topography. Accordingly, all the bushfire risk zones are identified. These bushfire risk zones are the areas where a fire is expected to occur and from where it can easily spread to other regions. An accurate evaluation of forest fire issues and pertinent decision systems are only reliable when the fire risk zone maps are available. Thus, integrated dynamic mathematical models coupled with remote sensing and geographical information system techniques are introduced to delineate the risk zones based on the fire risk mappings [
36].
Satellite data is a widely used primary source of information for mapping active fire areas at regional to global scales [
46,
47]. The Moderate-resolution Imaging Spectroradiometer (MODIS) from NASA Terra and Aqua satellites is the first-satellite borne sensor with the ability to monitor fire radiative energy (FRE) release rate, or power (FRP), quantitatively on a worldwide scale [
47]. Planned satellite systems like polar-orbiting Visible Infrared Imager Radiometer Suite (VIIRS) and the geostationary GOES-R Advanced Baseline Imager (ABI) provide fine spatial and temporal resolution of fire incidents. Their monitoring effectiveness is ensured through airborne sensors like the calibrated Autonomous Modular Sensor (AMS) [
48]. Two types of satellite data are used to detect and analyze fire events: active fire and burnt area products [
49]. Burnt area products are based on the variations in the reflectance, or a combination of reflectance and active fires [
50]. At the same time, active fire products are dependent on the detection of thermal anomalies. The global burnt area products are used to input the Global Fire Emissions Database (GFED), with the integration of empirical relationships to determine the role of small fires. Such fires are not monitored through course-resolution burned area products from MODIS active fires data [
51]. A key concern for the functional products of global burnt areas is that the results are available within a month of the fire event instead of immediate availability [
50]. This delay in the results challenges its applicability for near-real-time fire perimeter monitoring that is required for instant fire management and early evaluations regarding the location and extent of the fires. To address this issue, space-borne sensors are used for active fire monitoring. Contrary to the conventional products of burnt area data, monitoring of active fires through space-borne sensors ensures that data is instantly available, with a regular latency. Accordingly, modern fire management authorities use near-real-time active fires to estimate the burnt area [
46].
Randerson et al. [
51] and Van Hoang et al. [
36] have correlated the frequency of the active fire detections with the monthly observed burnt area from medium-coarse resolution sensors on the global to local scales. The local scale monitoring is typically validated through satellite burnt area imagery of the field measured samples. However, the cloud variability, topography, fuel, weather, and fire behavior, coupled with miscellaneous spatial and temporal resolution issues of the imagery used for calibration, can present challenges to this method [
49]. Oliva and Schroeder [
52] and Vadrevu et al. [
53] suggested that instead of incorporating the pixels of active fires, aggregation of the active fire could yield appropriate fire perimeter delineation at regional levels. Other studies have tested the interpolations of active fire clusters and successfully visualized these large fire perimeters, and calibrated the fire propagation models [
52,
54]. Various techniques have been used for the aggregation method, ranging from buffering of fire zones [
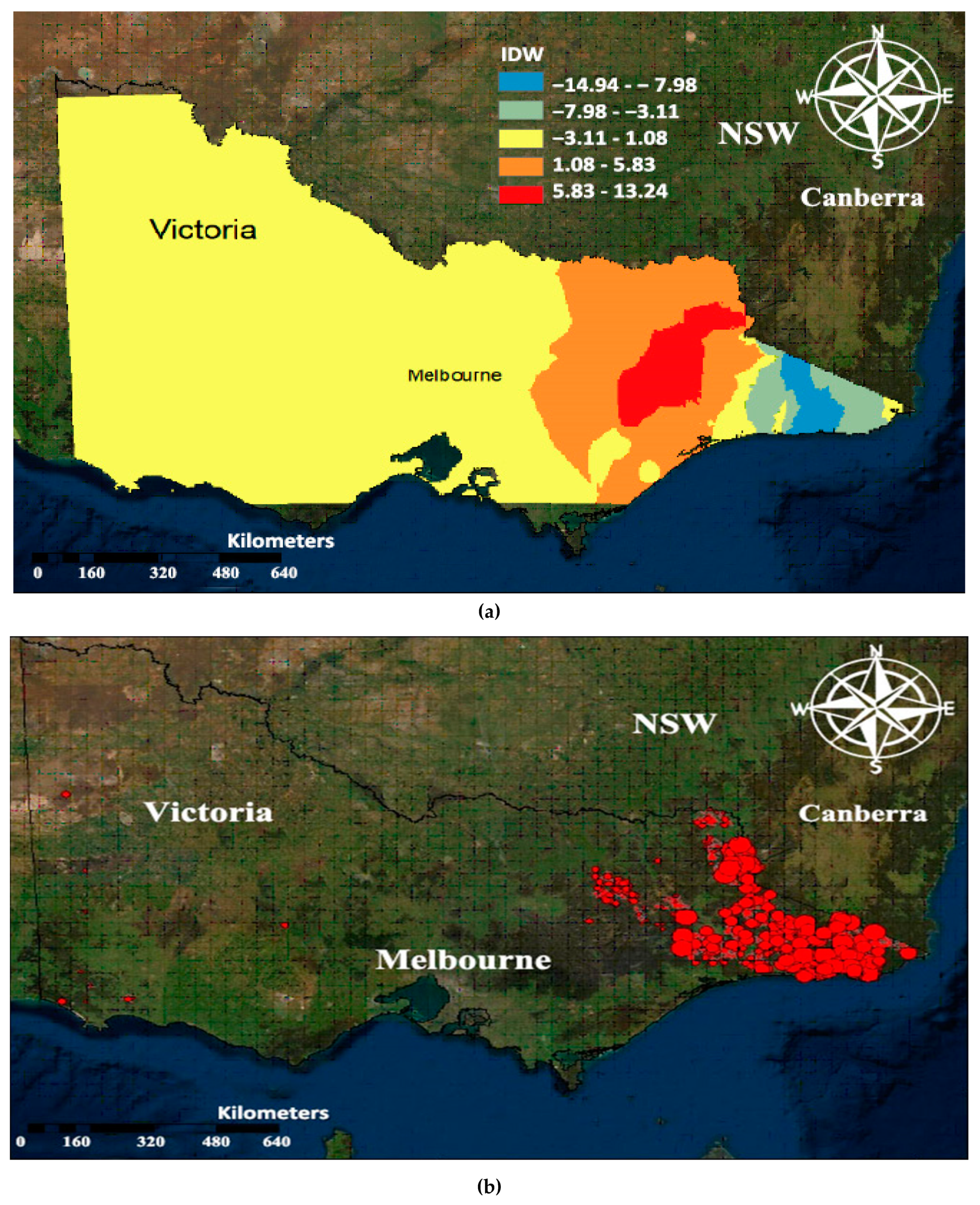
52], Kriging analysis [
55], weighted mean and distance methods, or the Inverse Distance Weighted (IDW) method [
56], to convex hull algorithms applied to the assessing the active fire clusters [
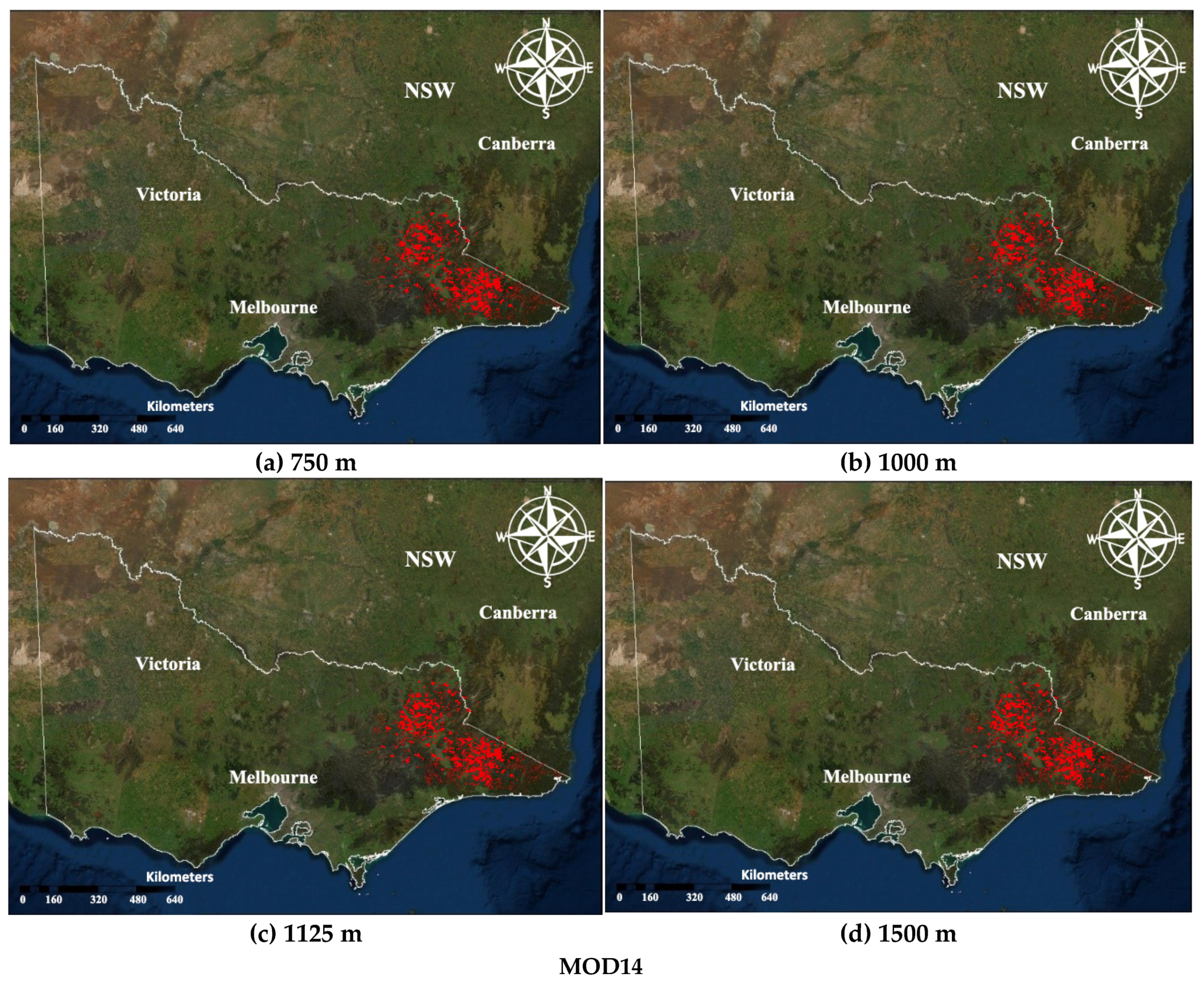
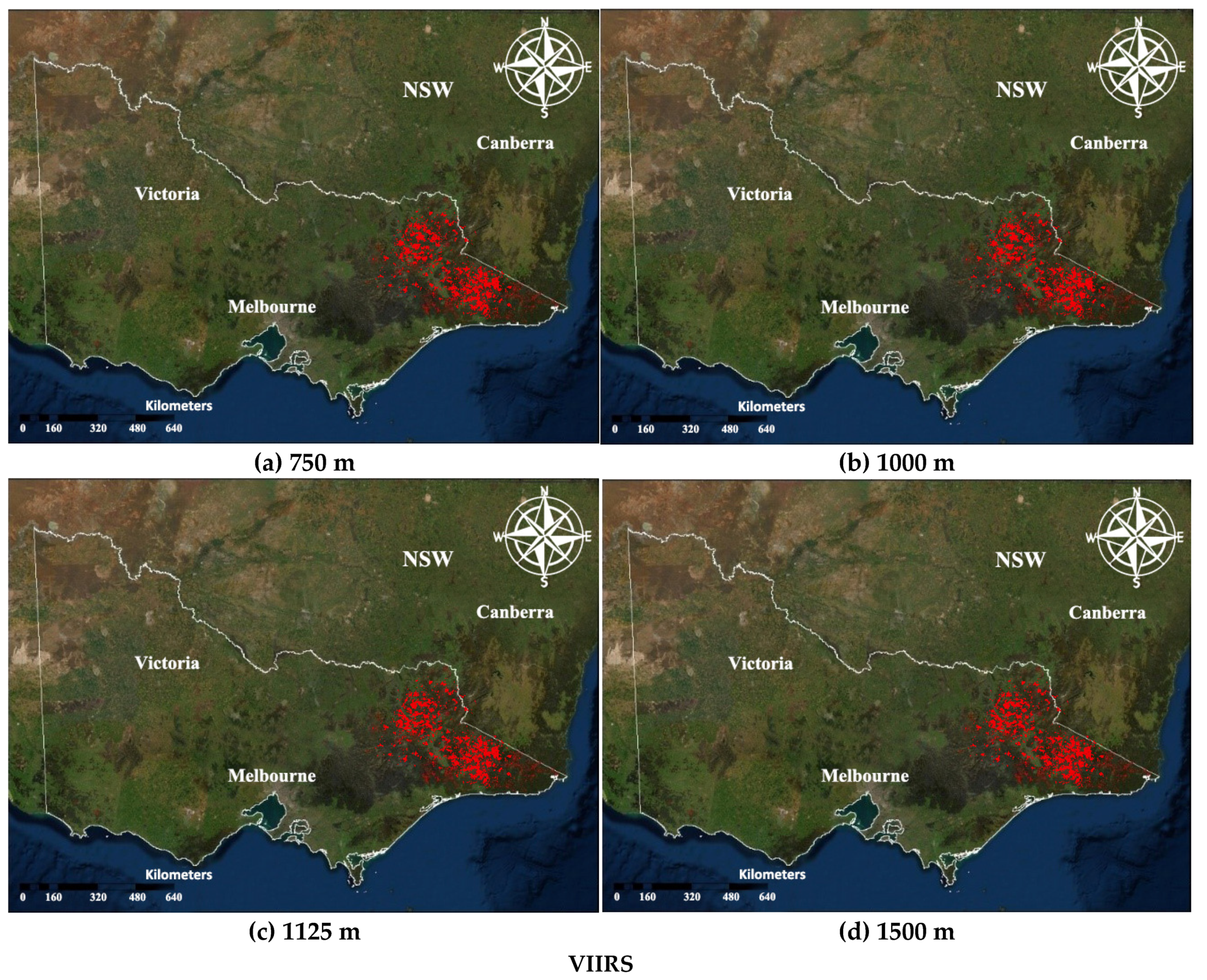
57]. Previous studies regarding active fire monitoring are carried out using coarse-resolution sensors, usually of 1 km resolution like MODIS or Advanced Very-High-Resolution Radiometer (AVHRR) [
55]. While for the first order burnt areas, the probability is achievable through these sensors, it is highly recommended to examine the possibility of fire perimeter mapping using high spatial and temporal resolutions [
52]. However, monitoring using satellite data is a trade-off between spatial and temporal resolutions. Thus, high temporal resolution data is preferred when assessing a large region. Some of the more recent available sensors like VIIRS on the Suomi National Polar-Orbiting Partnership (S-NPP) satellite provide great potential for detecting small fires that may have broader impacts. This sensor has a high spatial and temporal resolution of 375 m. These improved features of the VIIRS active fire products have reopened the possibility of directly mapping burnt areas using the active fire products [
52,
57]. Despite the great applicability of VIIRS active fire products, there is still a lack of studies to test bushfire monitoring. Further, an innovation in the estimation of forest fires perimeters is the introduction of the aggregated distance of MODIS and VIIRS active fires to assess the impact on the burnt area’s estimation. These have been utilized in the current study for VIC bushfire mapping and monitoring.
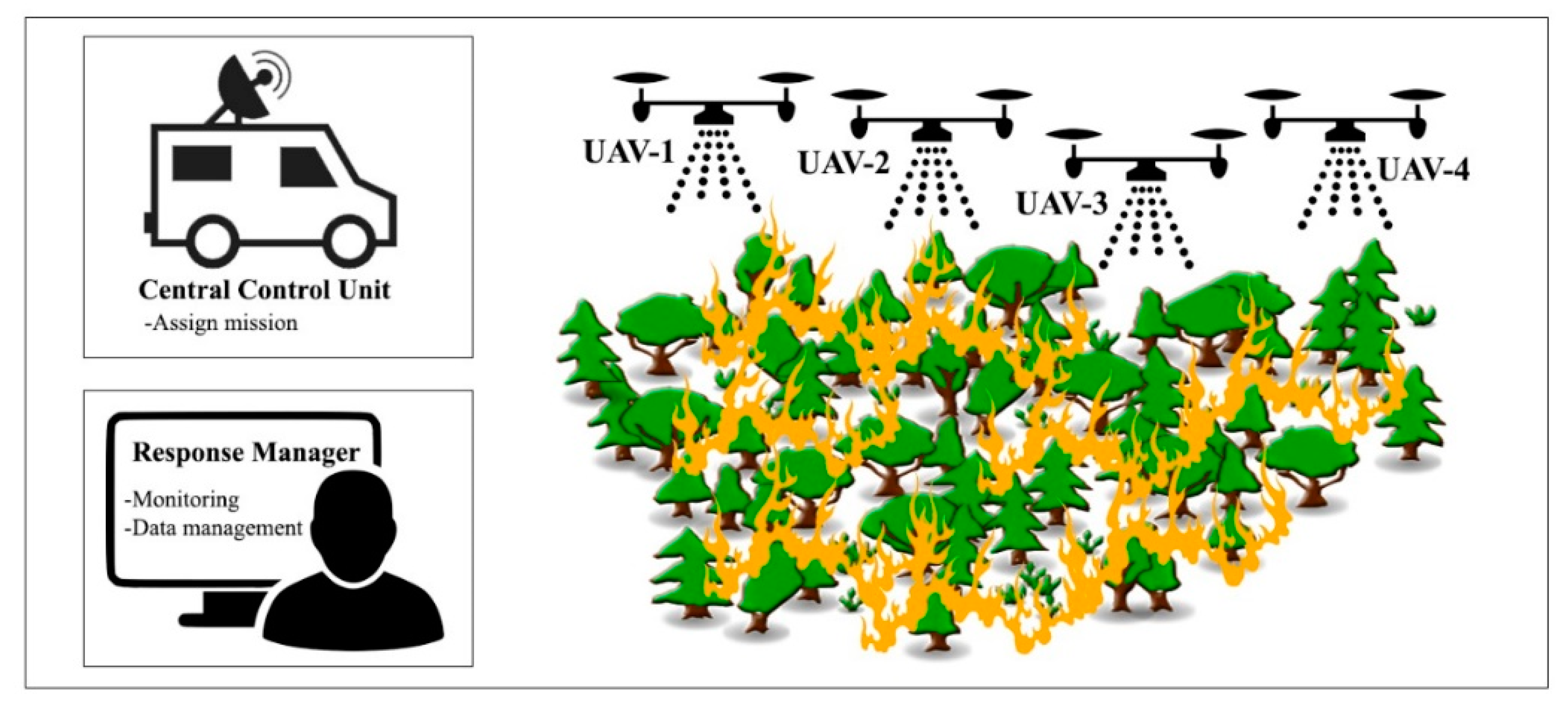
Coordination and communication are vital for any disaster response plan to execute all disaster management phases, i.e., preparedness, response, recovery, and reconstruction. Monitoring the impacts of the natural disaster are performed by space and airborne sensors equipped with optical instruments. UAVs have gained popularity for possible usage in disaster relief operations recently [
58]. It provides opportunities for disaster monitoring and mitigation. However, several challenges limit the application of UAVs, such as extreme weather events and objects that hinder its path and hidden routes due to smokes and lower visibility due to bushfires. Therefore, the UAV network must be enhanced, and path planning carried out to ensure that the UAVs can locate the disaster locations and carry out the assigned mission in the least amount of time. UAVs can bring substantial advances in disaster management [
59]. For example, UAVs can be equipped with various types of sensors for monitoring various aspects of the affected area. UAVs can fly under the clouds based on their lower altitude, which usually hinders satellite-based images; thus, UAVs obtain a higher quality of images [
60]. They can be easily deployed on various sites and locations where human access is limited, restricted, or dangerous. UAVs assist exploration teams in finding paths to reach the stranded people or victims and finding their way back to a secure place in case of bushfires. UAVs help generate instant maps of the areas, as existing maps may not be useful due to changes in the regions’ landscape because of bushfires. These maps are very useful in speeding up the relief effort. UAVs with 3D cameras can fly over the area to capture high-resolution images and autonomously generate high-resolution maps.
The post-disaster response, relief, and recovery processes have been investigated in recent research studies related to operations research and disaster management [
61,
62,
63,
64]. The associated problems involve distributing aid among the affected people, resource allocations, and the UAVs routing to instigate a swift disaster response. Resource allocation and vehicle routing have been of significant interest to researchers when dealing with such a problem. Rodriguez-Oreggia et al. [
64] presented a model based on transporting various relief goods to disaster victims. The properties of various routing problems for humanitarian relief and rehabilitation have also been reviewed [
62]. Similarly, the logistic methods to plan the relief of the people affected by a disaster have also been examined by Özdamar and Ertem [
63]. Anaya-Arenas et al. [
61] suggested providing an appropriate response to a disaster by meeting the victims’ needs through proper need assessment. The methods to be followed to evaluate the needs depend on the nature and severity of a disaster and how this event evolves with time [
64]. The needs assessment process begins rapidly as soon as a disaster occurs and is finished within a few days. This need assessment is not carried out to do a comprehensive survey about the requirements of victims. Instead, it is done to understand how a disaster impacts society, determine what difference has been made to the people’s living conditions, and identify the scope and magnitude of the response [
63]. The assessment teams authorized with the need assessment task are assigned sub-areas in a site affected by a disaster to conduct a rapid assessment of relief needs in the area. These teams visit all the specified locations periodically to assess the needs during the disaster relief phase. This detailed analysis is conducted to learn about people’s conditions and know whether adequate aid has reached the victims [
64]. A successful disaster response strategy is composed of both rapid and detailed needs assessment and response planning. Accordingly, advanced tools such as UAVs can be used for addressing these issues swiftly.
There is a lack of investigation related to the applications of the techniques mentioned above and tools at global and regional scales. Accordingly, this study is an original and novel effort at mapping the VIC bushfire hotspots. It emphasizes the identification of bush fire hotspots through GIS and remote sensing. It suggests mitigation measures to limit the hazards and adverse consequences of the fires using a UAV swarm. The purpose of this study is to provide an early fire warning system to the local communities and the relevant authorities, informing them of the approaching risk of bushfires and a mitigation mechanism based on UAV swarm to address bushfires disasters as soon as they arise. Prior information and early warning system are proposed to take necessary measures before the hazard occurs. By incorporating the potential hazard response measures, the early warning system could be highly beneficial in the decision-making during the post-bushfires disaster management phase. It will reduce the potentially devastating impacts on the economy, environment, and other pillars of sustainability. Similarly, the UAV swarms can assist with rapid response to bushfire disasters. A case study of the VIC region in Australia is used to visualize the proposed UAV swarm model.
The rest of the paper is organized as follows.
Section 2 discusses the method adopted in this study, explains the study’s flow, tools, and algorithms used with pertinent assumptions, and presents UAV swarms concepts.
Section 3 offers and discusses the results of the study. Finally,
Section 4 concludes the study where the study’s key takeaways are given, its limitation stated, and future directions discussed.





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}