

Downwind Fire and Smoke Detection during a Controlled Burn—Analyzing the Feasibility and Robustness of Several Downwind Wildfire Sensing Modalities through Real World Applications

 ,
,
Abstract
:1. Introduction
1.1. Related Work
1.2. Optical Sensors (Cameras)
1.3. Temperature
1.4. Humidity
1.5. Wind
1.6. Particulate Matter
1.7. Gas
1.8. Sound
1.9. Radio Frequency Interference
1.10. Multi Sensor Systems
2. Materials and Methods
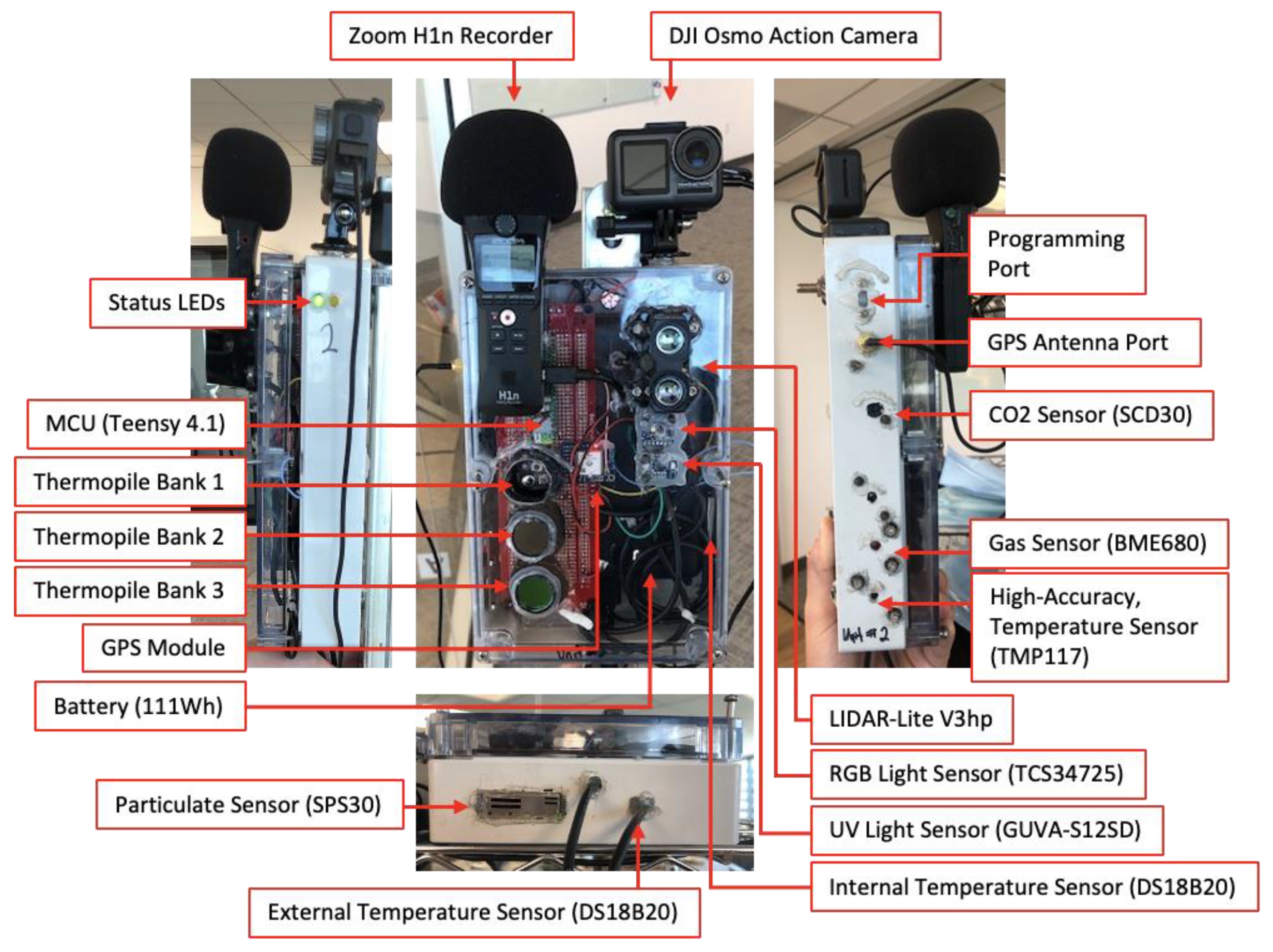
2.1. System Overview
- -
- Autonomous operation over 48-h;
- -
- Weather resistant;
- -
- Continuous camera snapshots for data ground truth over the entire experiment,
- -
- Installation time less than 10-min so as to not impede the controlled burn training exercises. In an actual deployment for uncontrolled wildfire detection, this would not be a constraint;
- -
- Local data storage with every sample being timestamped;
- -
- System offset from the ground level to minimize fire risk;
- -
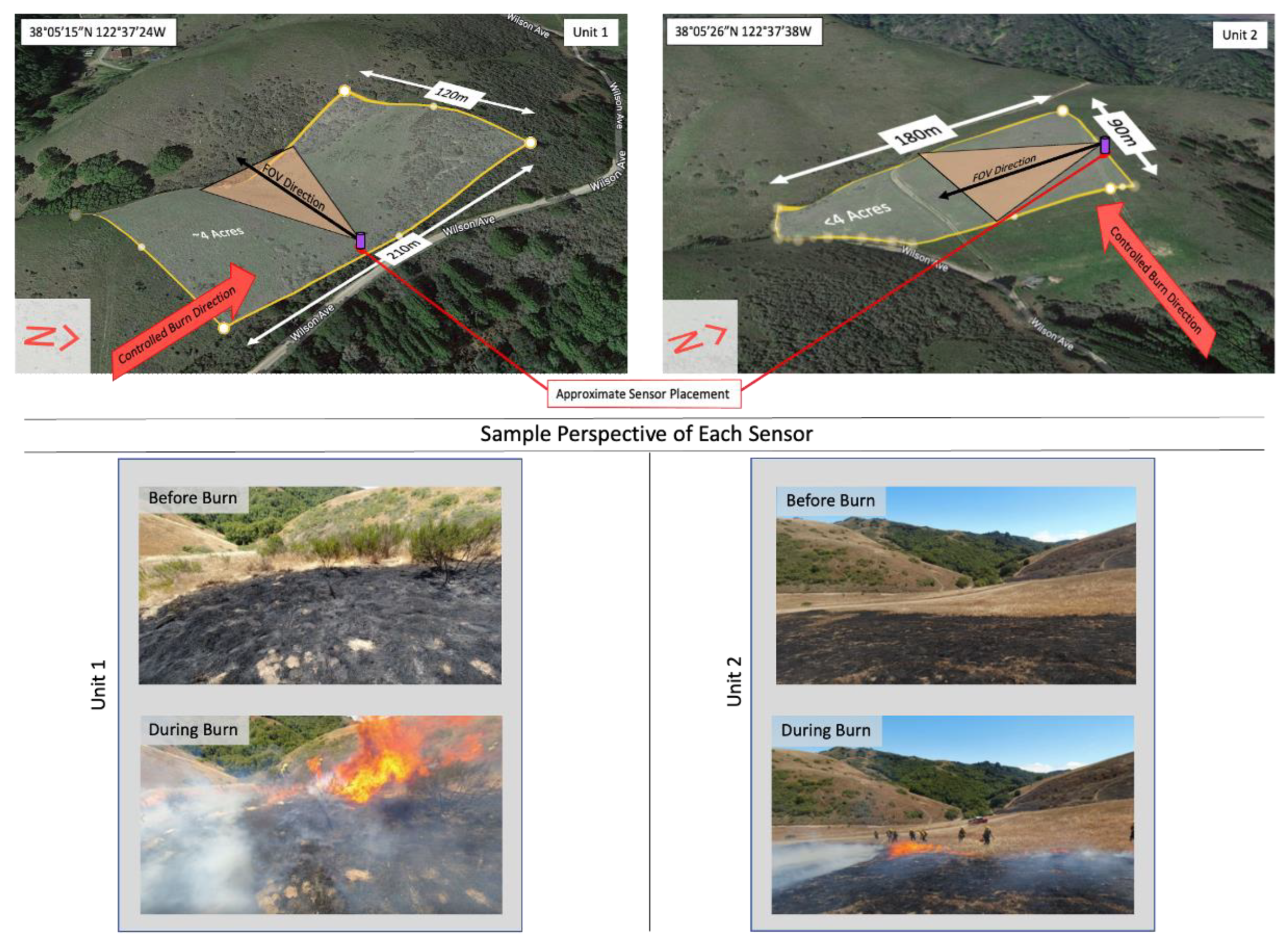
- Two systems built and deployed simultaneously at different locations to account for the uncertainty of when a controlled burn at a given site will begin and if it will be canceled due to weather or scheduling reasons.
2.2. Experimental Procedure
3. Results
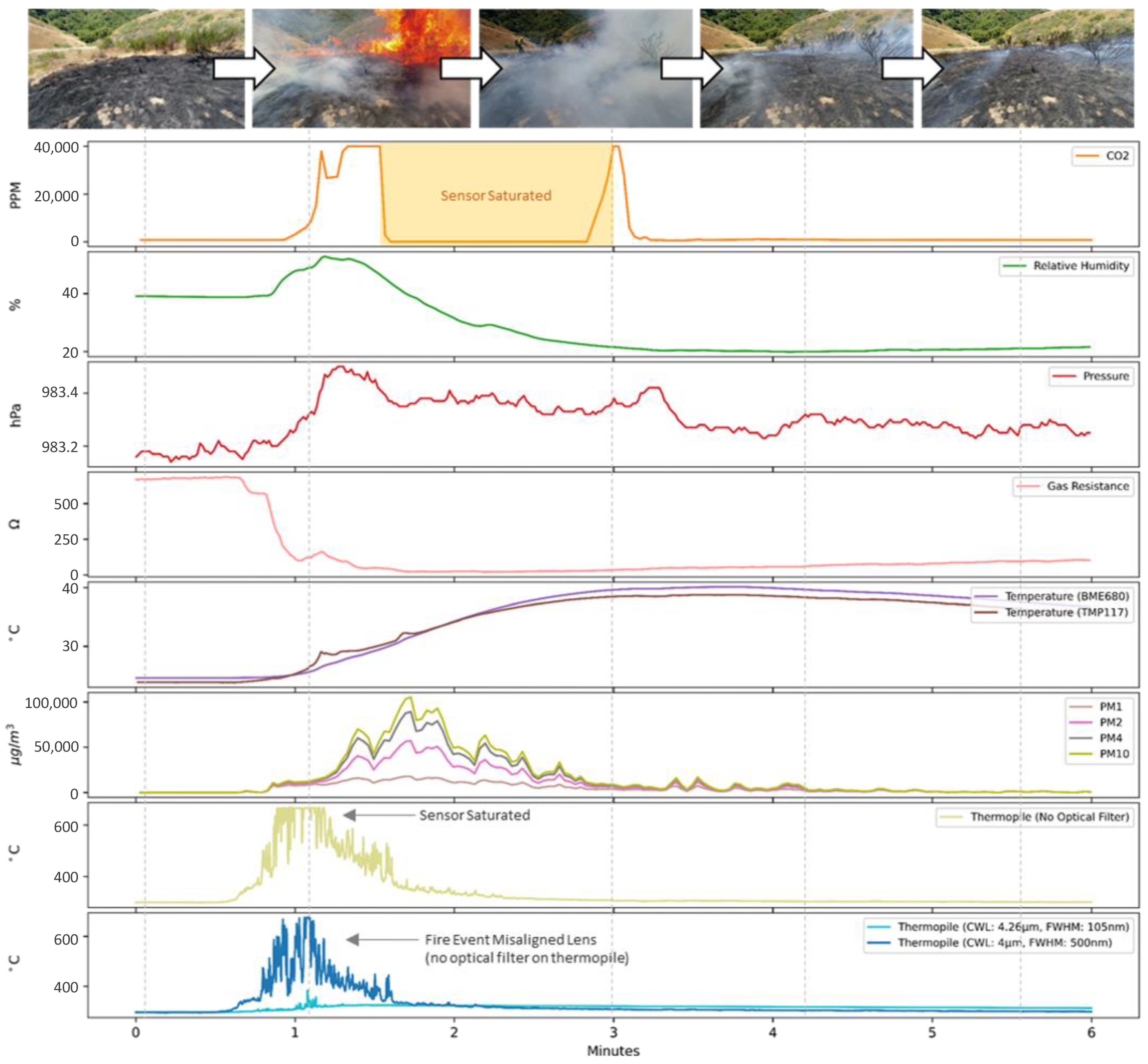
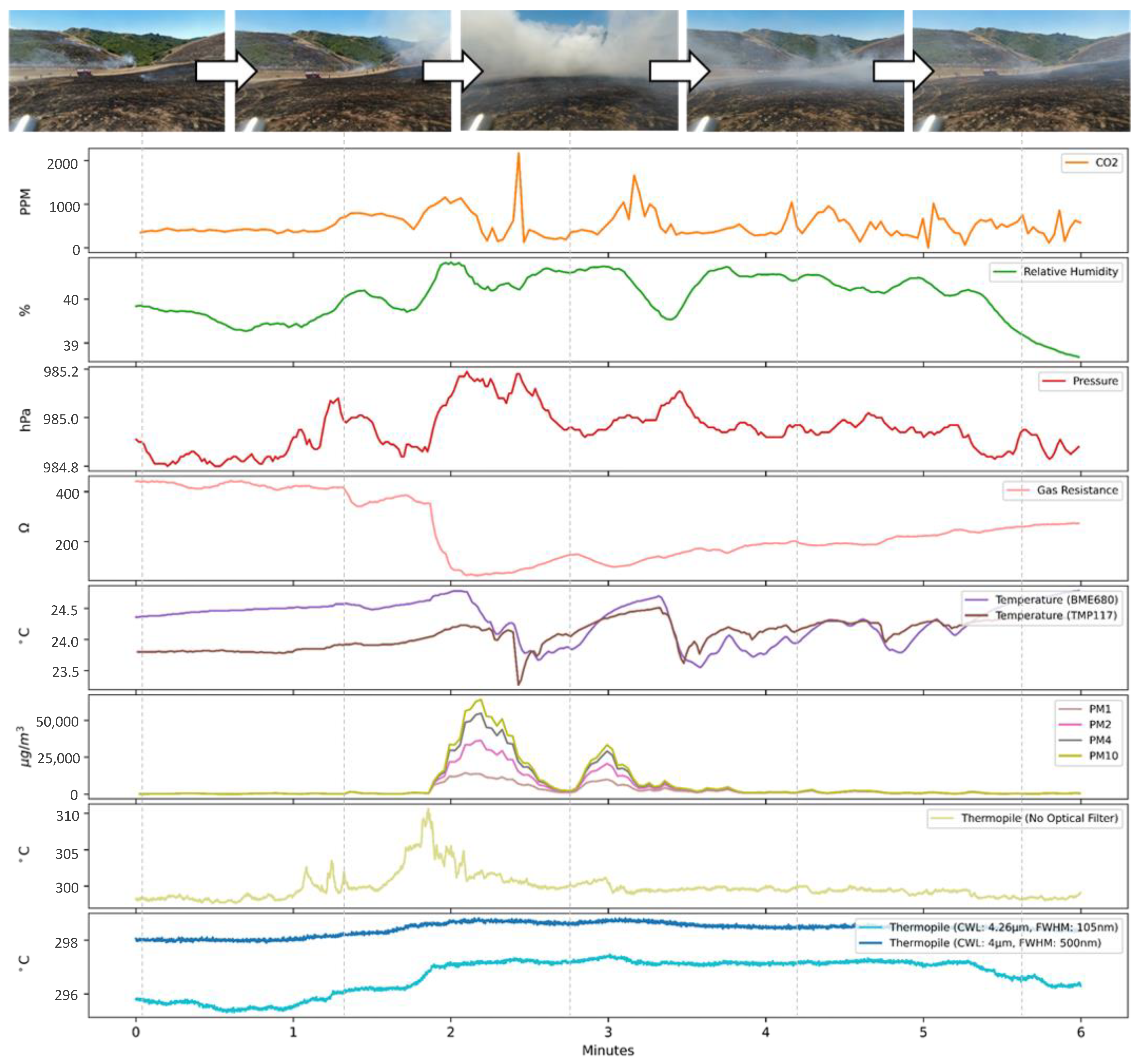
3.1. Temperature, Humidity, and Pressure
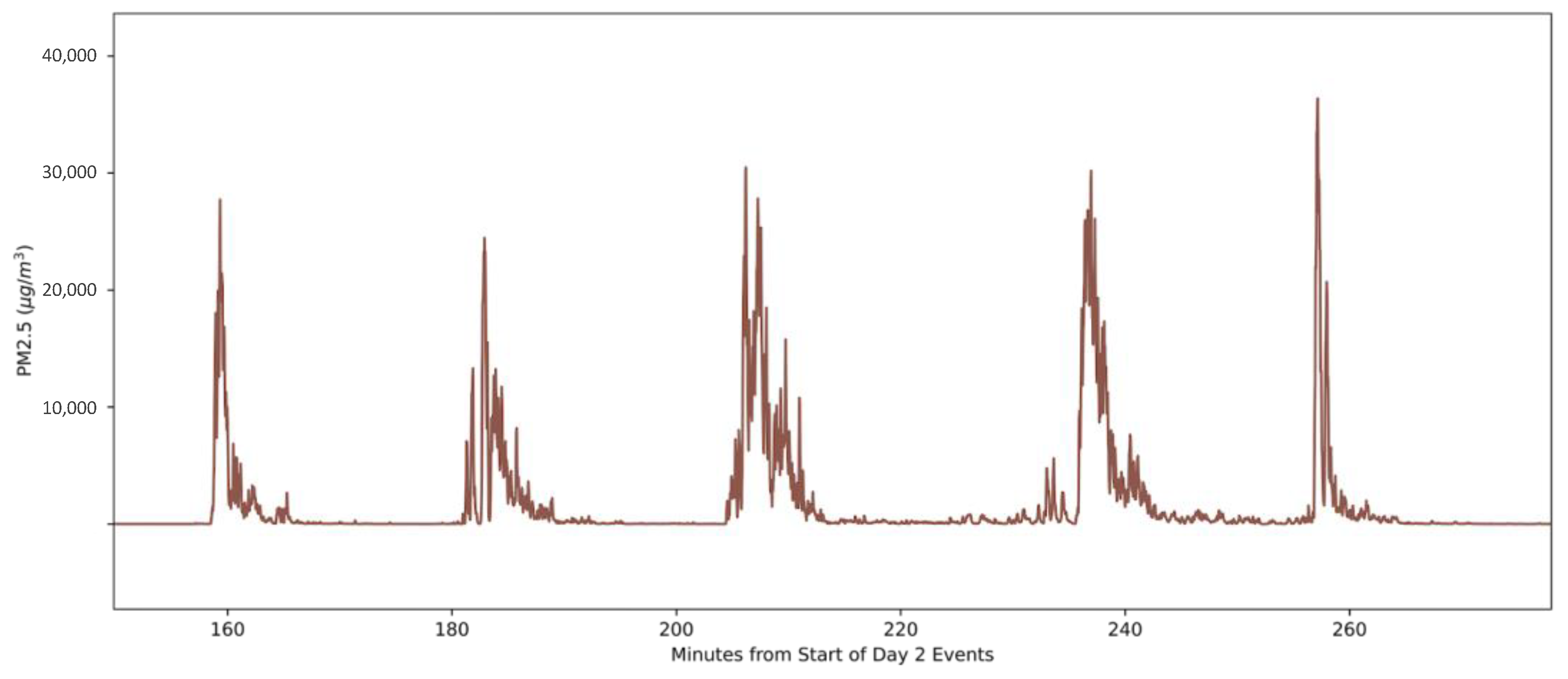
3.2. Particulate Matter
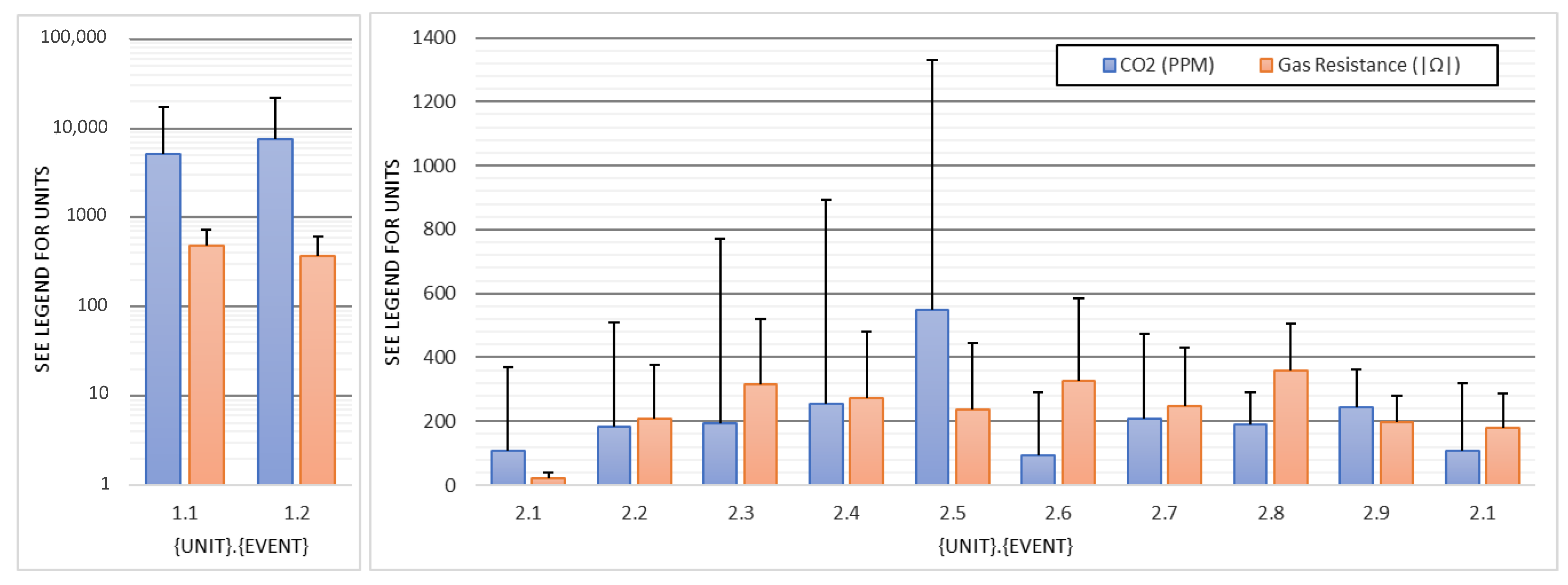
3.3. Gas
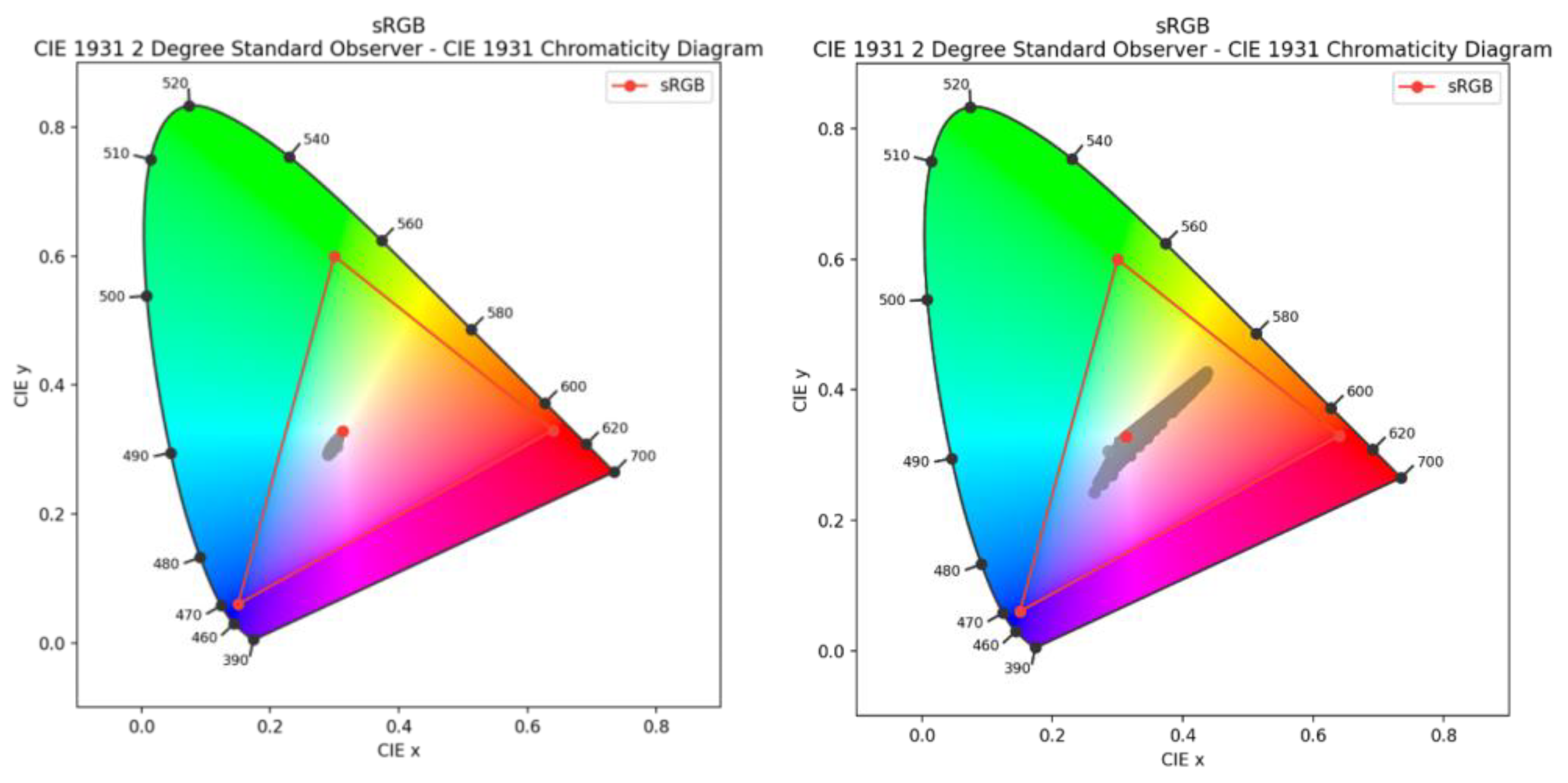
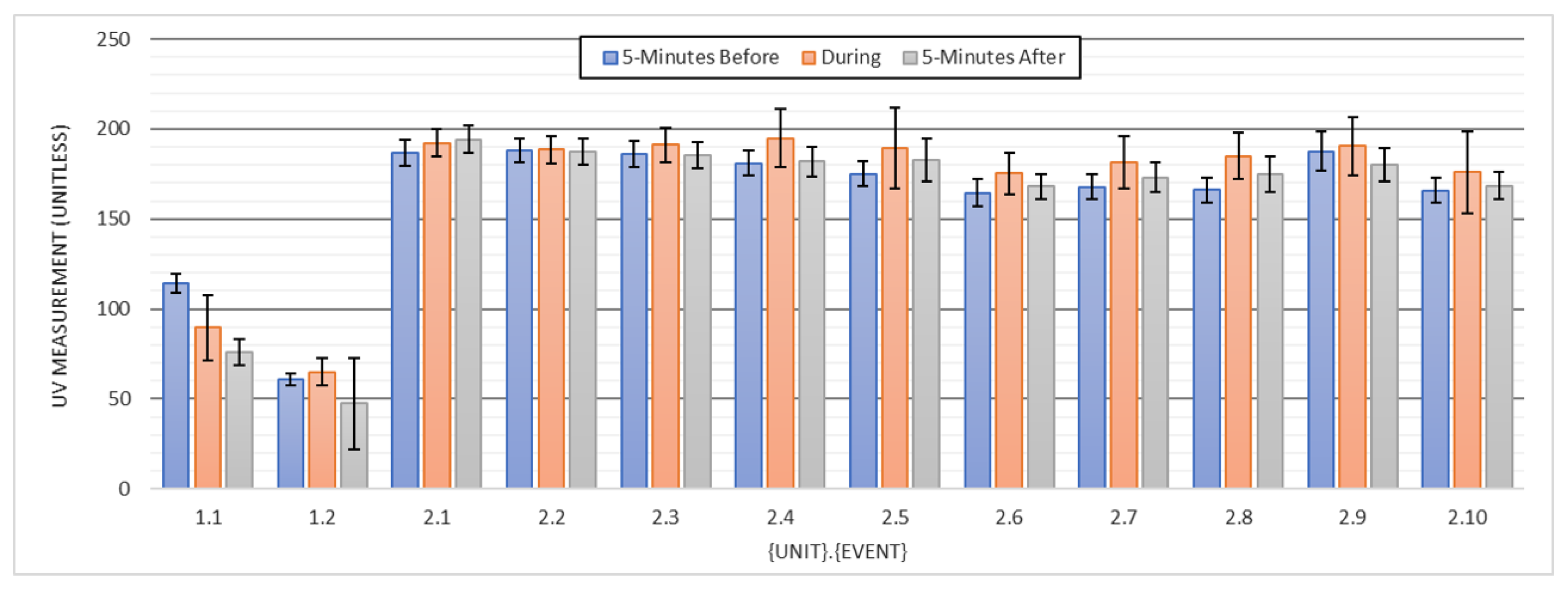
3.4. Optical: Visible and UV
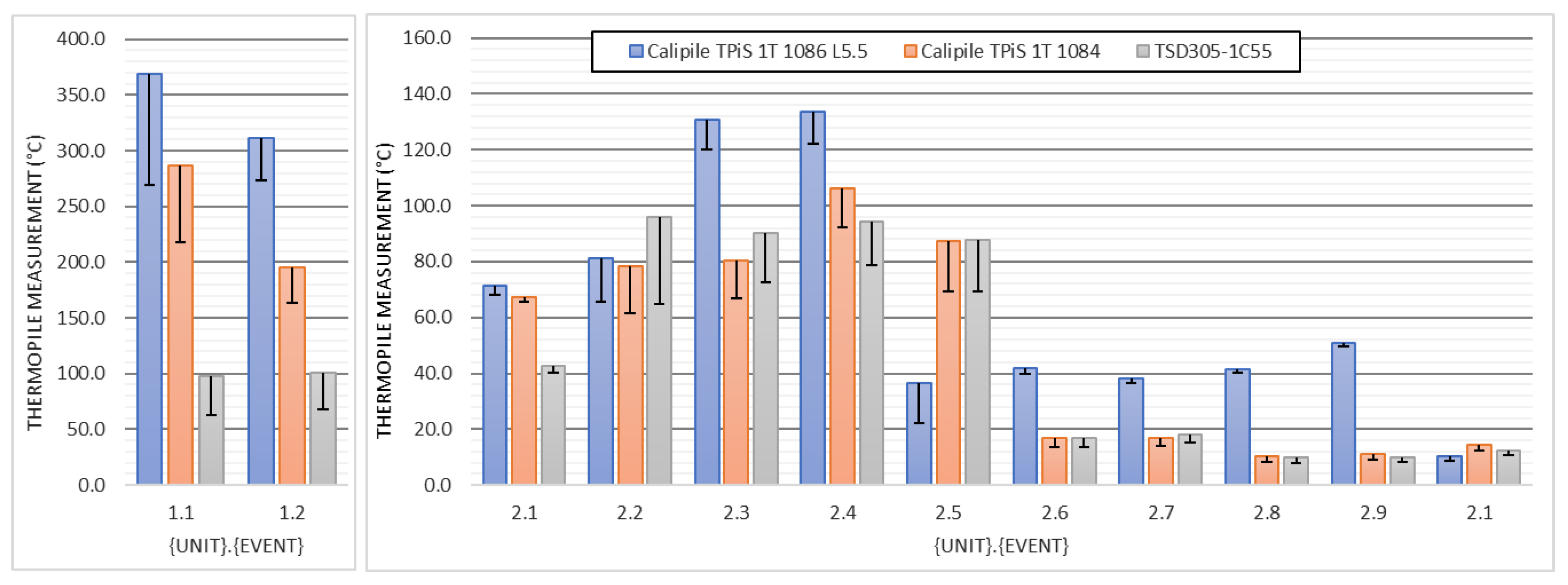
3.5. Optical: Infrared
4. Discussion
4.1. Multimodal Sensing Approach for Fire Detection
4.2. Practical Considerations
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bump, P. Analysis—Six of California’s Seven Largest Wildfires Have Erupted in the Past Year. Washington Post. 2021. Available online: www.washingtonpost.com/politics/2021/08/06/six-californias-seven-largest-wildfires-have-erupted-past-year/ (accessed on 11 August 2021).
- Reyes-Velarde, A. California’s Camp Fire Was the Costliest Global Disaster Last Year, Insurance Report Shows. Los Angeles Times. 2019. Available online: https://www.latimes.com/local/lanow/la-me-ln-camp-fire-insured-losses-20190111-story.html (accessed on 9 September 2023).
- U.S. Fire Administration. n.d.; What Is the WUI? Available online: www.usfa.fema.gov/wui/what-is-the-wui.html (accessed on 11 August 2021).
- Blalack, T.; Ellis, D.; Long, M.; Brown, C.; Kemp, R.; Khan, M. Low-Power Distributed Sensor Network for Wildfire Detection. In Proceedings of the 2019 SoutheastCon, Huntsville, AL, USA, 11–14 April 2019; pp. 1–3. [Google Scholar]
- PurpleAir: PurpleAir Map, Air Quality Map. Available online: http://map.purpleair.org/ (accessed on 1 August 2019).
- Saldamli, G.; Deshpande, S.; Jawalekar, K.; Gholap, P.; Tawalbeh, L.; Ertaul, L. Wildfire Detection using Wireless Mesh Network. In Proceedings of the 2019 Fourth International Conference on Fog and Mobile Edge Computing (FMEC), Rome, Italy, 10–13 June 2019; pp. 229–234. [Google Scholar]
- Cui, F. Deployment and integration of smart sensors with IoT devices detecting fire disasters in huge forest environment. Comput. Commun. 2020, 150, 818–827. [Google Scholar] [CrossRef]
- Hidestal, C.; Zreik, A. Smart Environment Early Wildfire Detection Using IoT. Master’s Thesis, Lund University, Lund, Sweden, 2020. [Google Scholar]
- Rizanov, S.; Stoynova, A.; Todorov, D. Single-Pixel Optoelectronic IR Detectors in Wireless Wildfire Detection Systems. In Proceedings of the 2020 43rd International Spring Seminar on Electronics Technology (ISSE), Demanovska Valley, Slovakia, 14–15 May 2020; pp. 1–6. [Google Scholar]
- U.S. National Park Service. Wildland Fire: What is a Prescribed Fire? Available online: www.nps.gov/articles/what-is-a-prescribed-fire.htm (accessed on 11 August 2021).
- Yuan, C.; Zhang, Y.; Liu, Z. A survey on technologies for automatic forest fire monitoring, detection, and fighting using unmanned aerial vehicles and remote sensing techniques. Can. J. For. Res. 2015, 45, 783–792. [Google Scholar] [CrossRef]
- Ankita, M.; Trinh, T. Early Wildfire Detection Technologies in Practice—A Review. Sustainability 2022, 14, 12270. [Google Scholar] [CrossRef]
- Allison, R.; Johnston, J.; Craig, G.; Jennings, S. Airborne Optical and Thermal Remote Sensing for Wildfire Detection and Monitoring. Sensors 2016, 16, 1310. [Google Scholar] [CrossRef]
- Gunay, O.; Tasdemir, K.; Toreyin, B.U.; Cetin, A. Video based wildfire detection at night. Fire Saf. J. 2019, 44, 860–868. [Google Scholar] [CrossRef]
- Sittakul, V.; Pasakawee, S.; Jan-im, C. Wireless Sensor Network for Wildfire Detection and Notification via Walkie—Talkie Network. In Proceedings of the 2019 16th International Conference on Electrical Engineering/Electronics, Computer, Telecommunications and Information Technology (ECTI-CON), Pattaya, Thailand, 10–13 July 2019; pp. 673–676. [Google Scholar]
- Lindsey FireSense. Available online: https://lindsey-firesense.com/ (accessed on 2 June 2021).
- IQ FireWatch. 2021. Available online: https://www.iq-firewatch.com/ (accessed on 2 June 2021).
- Lesnoy Dozor: Protects Forest from Fire. n.d. Available online: http://lesdozor.ru/en/ (accessed on 2 June 2021).
- FireHawk. 2021. Available online: https://home.firehawk.co.za//home (accessed on 2 June 2021).
- Anderson, H.E. Heat Transfer and Fire Spread; Res. Pap. INT-RP-69; Intermountain Forest and Range Experiment Station, Forest Service, U.S. Department of Agriculture: Ogden, UT, USA, 1965; Volume 20, p. 69.
- Frankman, D.; Webb, B.W.; Butler, B.W.; Jimenez, D.; Forthofer, J.M.; Sopko, P.; Shannon, K.S.; Hiers, J.K.; Ottmar, R.D. Measurements of convective and radiative heating in wildland fires. Int. J. Wildland Fire 2012, 22, 157–167. [Google Scholar] [CrossRef]
- Ulucinar, A.R.; Korpeoglu, I.; Cetin, A. A Wi-Fi Cluster Based Wireless Sensor Network Application and Deployment for Wildfire Detection. Int. J. Distrib. Sens. Netw. 2014, 10, 651957. [Google Scholar] [CrossRef]
- Barducci, A.; Guzzi, D.; Marcoionni, P.; Pippi, I. Infrared detection of active fires and burnt areas: Theory and observations. Infrared Phys. Technol. 2002, 43, 119–125. [Google Scholar] [CrossRef]
- Ward, D. Chapter 3—Combustion Chemistry and Smoke. In Forest Fires; Johnson, E.A., Miyanishi, K., Eds.; Academic Press: San Diego, CA, USA, 2001; pp. 55–77. [Google Scholar] [CrossRef]
- Sun, H.L.; Rong, Z.; Liu, C.; Liu, J.; Zhang, Y.; Zhang, P.; Wang, X.; Gao, W. Spectral characteristics of infrared radiation from forest fires. In Proceedings of SPIE—Remote Sensing and Modeling of Ecosystems for Sustainability III; SPIE: Bellingham, WA, USA, 2006; Volume 6298. [Google Scholar]
- Potter, B.E. The role of released moisture in the atmospheric dynamics associated with wildland fires. Int. J. Wildland Fire 2005, 14, 77–84. [Google Scholar] [CrossRef]
- Lutakamale, A.S.; Kaijage, S. Wildfire monitoring and detection system using wireless sensor network: A case study of Tanzania. Wirel. Sens. Netw. 2017, 9, 274–289. [Google Scholar] [CrossRef]
- Byram, G.M. Combustion of forest fuels. In Forest Fire: Control and Use; Davis, K.P., Ed.; McGraw-Hill: New York, NY, USA, 1959; pp. 61–89. [Google Scholar]
- Dampage, U.; Bandaranayake, L.; Wanasinghe, R.; Kottahachchi, K.; Jayasanka, B. Forest fire detection system using wireless sensor networks and machine learning. Sci. Rep. 2022, 12, 46. [Google Scholar] [CrossRef] [PubMed]
- Hartung, C.; Han, R.; Seielstad, C.; Holbrook, S. FireWxNet: A multi-tiered portable wireless system for monitoring weather conditions in wildland fire environments. In Proceedings of the 4th International Conference on Mobile Systems, Applications, and Services (MobiSys 2006), Uppsala, Sweden, 19–22 June 2006. [Google Scholar]
- National Wildfire Coordinating Group. Belt Weather Kit. 2022. Available online: https://www.nwcg.gov/term/glossary/belt-weather-kit (accessed on 2 June 2021).
- Bayo, A.; Antolín, D.; Medrano, N.; Calvo, B.; Celma, S. Development of a wireless sensor network system for early forest fire detection. In Proceedings of the European Workshop on Smart Objects: Systems, Technologies and Applications, Ciudad, Spain, 15–16 June 2010; pp. 1–7. [Google Scholar]
- Rothermel, R.C. A Mathematical Model for Predicting Fire Spread in Wildland Fuels; Res. Pap. INT-115; Intermountain Forest and Range Experiment Station, Forest Service, U.S. Department of Agriculture: Ogden, UT, USA, 1972; 40p.
- Albini, F.A. Estimating Windspeeds for Predicting Wildland Fire Behavior; Intermountain Forest and Range Experiment Station, Forest Service, U.S. Department of Agriculture: Ogden, UT, USA, 1979; Volume 221.
- Wu, J.; Van Vroonhoven, C.; Chae, Y.; Makinwa, K. A 25mW CMOS sensor for wind and temperature measurement. In Proceedings of the SENSORS IEEE, Limerick, Ireland, 28–31 October 2011; pp. 1261–1264. [Google Scholar]
- Hays, M.D.; Geron, C.D.; Linna, K.J.; Smith, N.D.; Schauer, J.J. Speciation of Gas-Phase and Fine Particle Emissions from Burning of Foliar Fuels. Environ. Sci. Technol 2002, 36, 2281–2295. [Google Scholar] [CrossRef] [PubMed]
- Yadav, I.C.; Devi, N.L. Biomass Burning, Regional Air Quality, and Climate Change. Earth Syst. Environ. Sci. 2019, 386–391. [Google Scholar]
- Li, X.; Wang, S.; Duan, L.; Hao, J.; Li, C.; Chen, Y.; Yang, L. Particulate and trace gas emissions from open burning of wheat straw and corn stover in China. Environ. Sci. Technol. 2007, 41, 6052–6058. [Google Scholar] [CrossRef] [PubMed]
- National Research Council: Committee on Air Quality Management in the United States, Board on Environmental Studies and Toxicology, Board on Atmospheric Sciences and Climate, Division on Earth and Life Studies. Air Quality Management in the United States; National Academies Press: Washington, DC, USA, 2004; ISBN 0-309-08932-8. [Google Scholar]
- Fraser, M.P.; Lakshmanan, K. Using levoglucosan as a molecular marker for the long-range transport of biomass combustion aerosols. Environ. Sci. Technol. 2000, 34, 4560–4564. [Google Scholar] [CrossRef]
- Holder, A.L.; Mebust, A.K.; Maghran, L.A.; McGown, M.R.; Stewart, K.E.; Vallano, D.M.; Elleman, R.A.; Baker, K.R. Field evaluation of low-cost particulate matter sensors for measuring wildfire smoke. Sensors 2020, 20, 4796. [Google Scholar] [CrossRef]
- He, Z.; Fang, Y.; Sun, N.; Liang, X. Wireless communication-based smoke detection system design for forest fire monitoring. In Proceedings of the 2016 31st Youth Academic Annual Conference of Chinese Association of Automation (YAC), Wuhan, China, 11–13 November 2016; pp. 475–480. [Google Scholar]
- Hodgkinson, J.; Smith, R.; Ho, W.O.; Saffell, J.R.; Tatam, R.P. Non-dispersive infra-red (NDIR) measurement of carbon dioxide at 4.2 μm in a compact and optically efficient sensor. Sens. Actuators B Chem. 2013, 186, 580–588. [Google Scholar] [CrossRef]
- Liang, Y.; Stamatis, C.; Fortner, E.C.; Wernis, R.A.; Van Rooy, P.; Majluf, F.; Yacovitch, T.I. Emissions of Organic Compounds from Western US Wildfires and Their near-Fire Transformations. Atmos. Chem. Phys. 2022, 22, 9877–9893. [Google Scholar] [CrossRef]
- Palm, B.B.; Peng, Q.; Fredrickson, C.D.; Lee, B.H.; Garofalo, L.A.; Pothier, M.A.; Kreidenweis, S.M.; Farmer, D.K.; Pokhrel, R.P.; Shen, Y.; et al. Quantification of Organic Aerosol and Brown Carbon Evolution in Fresh Wildfire Plumes. Proc. Natl. Acad. Sci. USA 2020, 117, 29469–29477. [Google Scholar] [CrossRef]
- Stockwell, C.E.; Yokelson, R.J.; Kreidenweis, S.M.; Robinson, A.L.; DeMott, P.J.; Sullivan, R.C.; Reardon, J.; Ryan, K.C.; Griffith, D.W.; Stevens, L. Trace Gas Emissions from Combustion of Peat, Crop Residue, Domestic Biofuels, Grasses, and Other Fuels: Configuration and Fourier Transform Infrared (FTIR) Component of the Fourth Fire Lab at Missoula Experiment (Flame-4). Atmos. Chem. Phys. 2022, 14, 9727–9754. [Google Scholar] [CrossRef]
- Andreae, M.O. Emission of Trace Gases and Aerosols from Biomass Burning—An Updated Assessment. Atmos. Chem. Phys. 2019, 19, 8523–8546. [Google Scholar] [CrossRef]
- Khamukhin, A.A.; Bertoldo, S. Spectral analysis of forest fire noise for early detection using wireless sensor networks. In Proceedings of the 2016 International Siberian Conference on Control and Communications (SIBCON), Moscow, Russia, 12–14 May 2016; pp. 1–4. [Google Scholar]
- Thompson, K.; Yip, D.; Koo, E.; Linn, R.; Marshall, G.; Refai, R.; Schroeder, D. Quantifying Firebrand Production and Transport Using the Acoustic Analysis of In-Fire Cameras. Fire Technol. 2011, 58, 1617–1638. [Google Scholar] [CrossRef]
- Yedinak, K.M.; Anderson, M.J.; Apostol, K.G.; Smith, A.M.S. Vegetation Effects on Impulsive Events in the Acoustic Signature of Fires. J. Acoust. Soc. Am. 2017, 141, 557–562. [Google Scholar] [CrossRef]
- Boan, J.A. Radio Propagation in Fire Environments. Ph.D. Thesis, University of Adelaide, Adelaide, SA, Australia, 2009. [Google Scholar]
- Li, Y.; Yuan, H.; Lu, Y.; Xu, R.; Fu, M.; Yuan, M.; Han, L. Experimental Studies of Electromagnetic Wave Attenuation by Flame and Smoke in Structure Fire. Fire Technol. 2017, 53, 5–27. [Google Scholar] [CrossRef]
- Vélez, R. Los incendios forestales en la Cuenca Mediterránea. In La Defensa Contra Incendios Forestales; Vélez, R., Ed.; Fundamentos y Experiencias; MacGraw-Hill: Madrid, Spain, 2000; pp. 3.1–3.15. [Google Scholar]
- Landis, M.S.; Long, R.W.; Krug, J.; Colón, M.; Vanderpool, R.; Habel, A.; Urbanski, S.P. The U.S. EPA Wildland Fire Sensor Challenge: Performance and Evaluation of Solver Submitted Multi-Pollutant Sensor Systems. Atmos. Environ. 2021, 247, 118165. [Google Scholar] [CrossRef] [PubMed]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Description | Sensor Type | Sample Rate (Hz) |
|---|---|---|
| Thermopiles | Optical (infrared) | 10 |
| CO2 Sensor (SCD30) | Optical (infrared) | 0.5 |
| Particulate Sensor (SPS30) | Optical | 0.5 |
| Temperature Sensor (TMP117) | Heat Transfer | 1 |
| Temperature Sensor (DS8B20) | Heat Transfer | 1 |
| Gas Sensor (BME680) | Metal Oxide | 1 |
| RGB Light Sensor (TCS34725) | Optical (visible) | 0.2 |
| UV Light Sensor (GUVA-S12SD) | Optical (ultraviolet) | 10 |
| Camera | Optical (visible) | 1 |
| Microphone | Cardioid Condenser Stereo Pair | 44,100 |
| Unit | Event | Day | Time |
|---|---|---|---|
| 1 | 1 | 2 | 12:20 |
| 2 | 2 | 13:06 | |
| 2 | 1 | 1 | 11:48 |
| 2 | 1 | 12:27 | |
| 3 | 1 | 14:05 | |
| 4 | 1 | 14:29 | |
| 5 | 1 | 14:59 | |
| 6 | 2 | 11:24 | |
| 7 | 2 | 11:47 | |
| 8 | 2 | 12:11 | |
| 9 | 2 | 12:42 | |
| 10 | 2 | 13:02 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chwalek, P.; Chen, H.; Dutta, P.; Dimon, J.; Singh, S.; Chiang, C.; Azwell, T. Downwind Fire and Smoke Detection during a Controlled Burn—Analyzing the Feasibility and Robustness of Several Downwind Wildfire Sensing Modalities through Real World Applications. Fire 2023, 6, 356. https://doi.org/10.3390/fire6090356
Chwalek P, Chen H, Dutta P, Dimon J, Singh S, Chiang C, Azwell T. Downwind Fire and Smoke Detection during a Controlled Burn—Analyzing the Feasibility and Robustness of Several Downwind Wildfire Sensing Modalities through Real World Applications. Fire. 2023; 6(9):356. https://doi.org/10.3390/fire6090356
Chicago/Turabian StyleChwalek, Patrick, Hall Chen, Prabal Dutta, Joshua Dimon, Sukh Singh, Constance Chiang, and Thomas Azwell. 2023. "Downwind Fire and Smoke Detection during a Controlled Burn—Analyzing the Feasibility and Robustness of Several Downwind Wildfire Sensing Modalities through Real World Applications" Fire 6, no. 9: 356. https://doi.org/10.3390/fire6090356
APA StyleChwalek, P., Chen, H., Dutta, P., Dimon, J., Singh, S., Chiang, C., & Azwell, T. (2023). Downwind Fire and Smoke Detection during a Controlled Burn—Analyzing the Feasibility and Robustness of Several Downwind Wildfire Sensing Modalities through Real World Applications. Fire, 6(9), 356. https://doi.org/10.3390/fire6090356