
Multi-Sensor Geomatic Techniques for the 3D Documentation and Virtual Repositioning of Elements of the Church of S. Miguel (Jaén, Spain)
 , , , and
, , , and
Abstract
:1. Introduction
1.1. Church of S. Miguel
1.2. Objectives of the Study
2. Materials and Methods
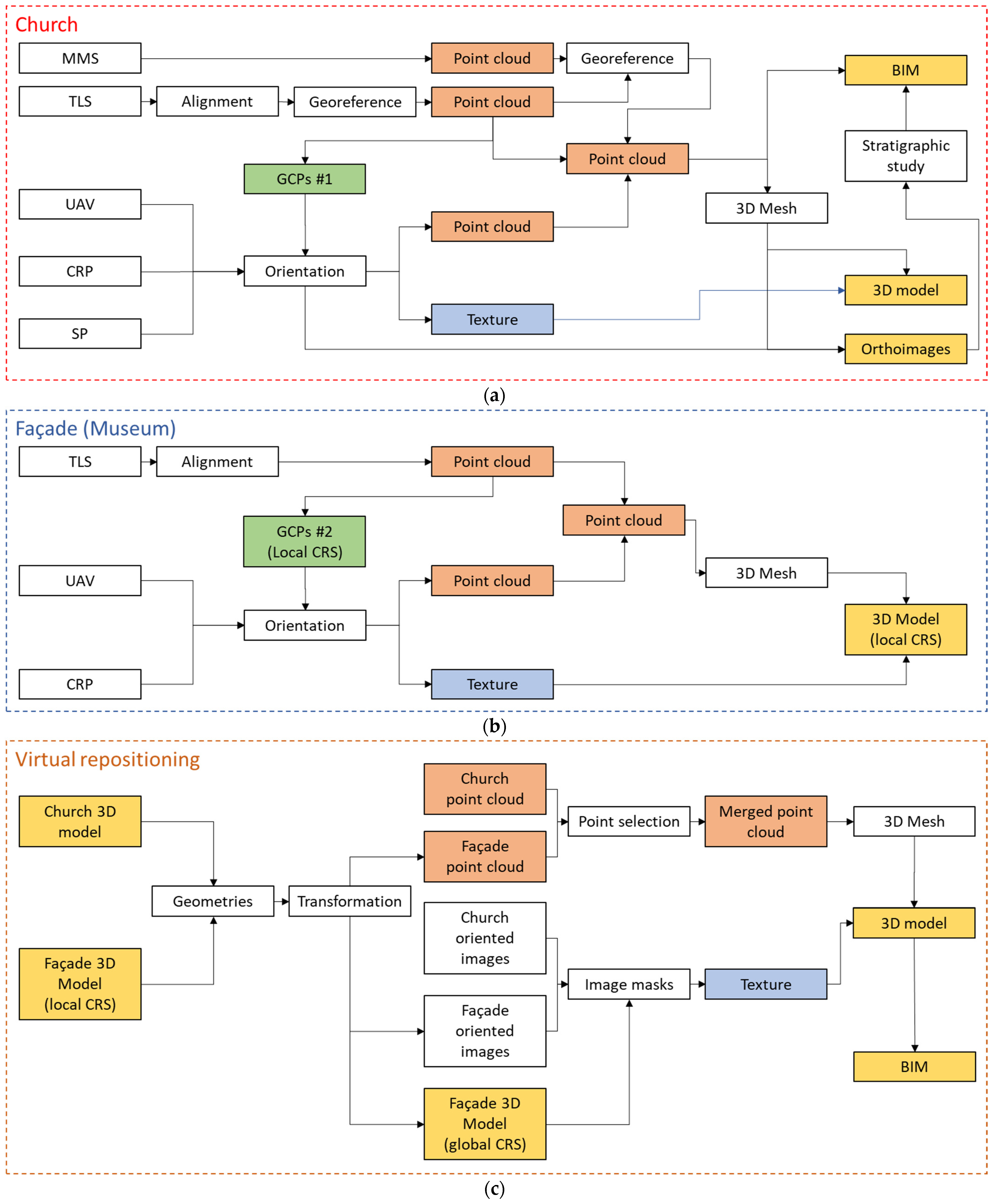
2.1. Procedures Developed in the Church
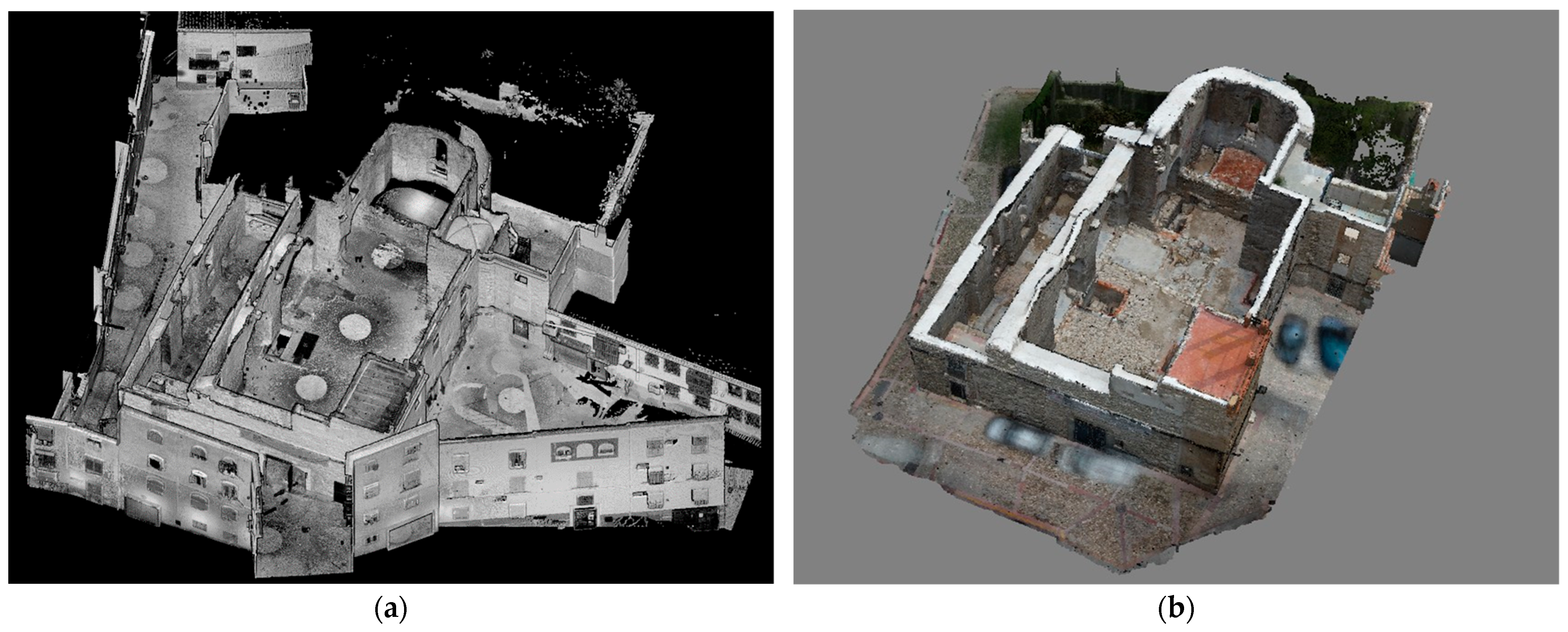
- TLS was focused on obtaining an accurate point cloud of the church and determining the coordinates of a set of Ground Control Points (GCPs #1), materialized on the object by means of targets, to be used in photogrammetric orientation procedures. Therefore, the final TLS point cloud was basic for the determination of the church’s geometry. This aspect implied the need for a large number of scanning stations to cover the entire scene. More specifically, we acquired 50 scans to cover most of the scene (Figure 4b). To improve the efficiency of the data acquisition, the scans were configured to avoid the possibility of obtaining color information at each point. This meant a capture time of about five minutes at each scanning station, considering a resolution value of about 12 mm at 10 m, guaranteeing a final point cloud with a minimum separation of less than one centimeter. Therefore, the scanner did not acquire images. We focused the acquisition of radiometric information on photogrammetry. The location of the scanning stations was planned in order to obtain complete coverage of the site. The distribution was also configured considering a large overlap between adjacent point clouds to facilitate alignment procedures. However, some zones, mainly located in higher areas, were not covered by this technique. Therefore, these areas were surveyed using photogrammetry. After TLS acquisition, all point clouds were relatively aligned, obtaining a complete point cloud (Figure 5a) using Faro Scene v.2023 and Maptek PointStudio v.2023 software. The Root Mean Squared Error (RMSE) of the alignment of all point clouds was about 13 mm. This point cloud was georeferenced to a global coordinate reference system (CRS) using external sources (an official LiDAR dataset of the zone);
- An MMS was applied in complex areas (narrow spaces) following planned trajectories of closed rings of a few meters in length (Figure 4a). The objective was to cover areas with gaps (considering other techniques) due to the complexity of the geometry or due to the presence of occlusions. These areas were illuminated by artificial light systems to facilitate sensor orientation (using Visual SLAM). We captured twelve point clouds following closed rings, obtaining a complete coverage of these complex zones. The point clouds were processed using Leica Cyclone Register 360 software. Georeferencing was carried out using the point cloud obtained from TLS. In this sense, all the point clouds obtained from MMSs were aligned, taking the TLS one as reference, using Maptek PointStudio v.2023 software. Therefore, the premise of MMS surveys was that all MMS point clouds had to share common areas with the reference point cloud (TLS). The RMSE of the alignment of all point clouds was about 26 mm;
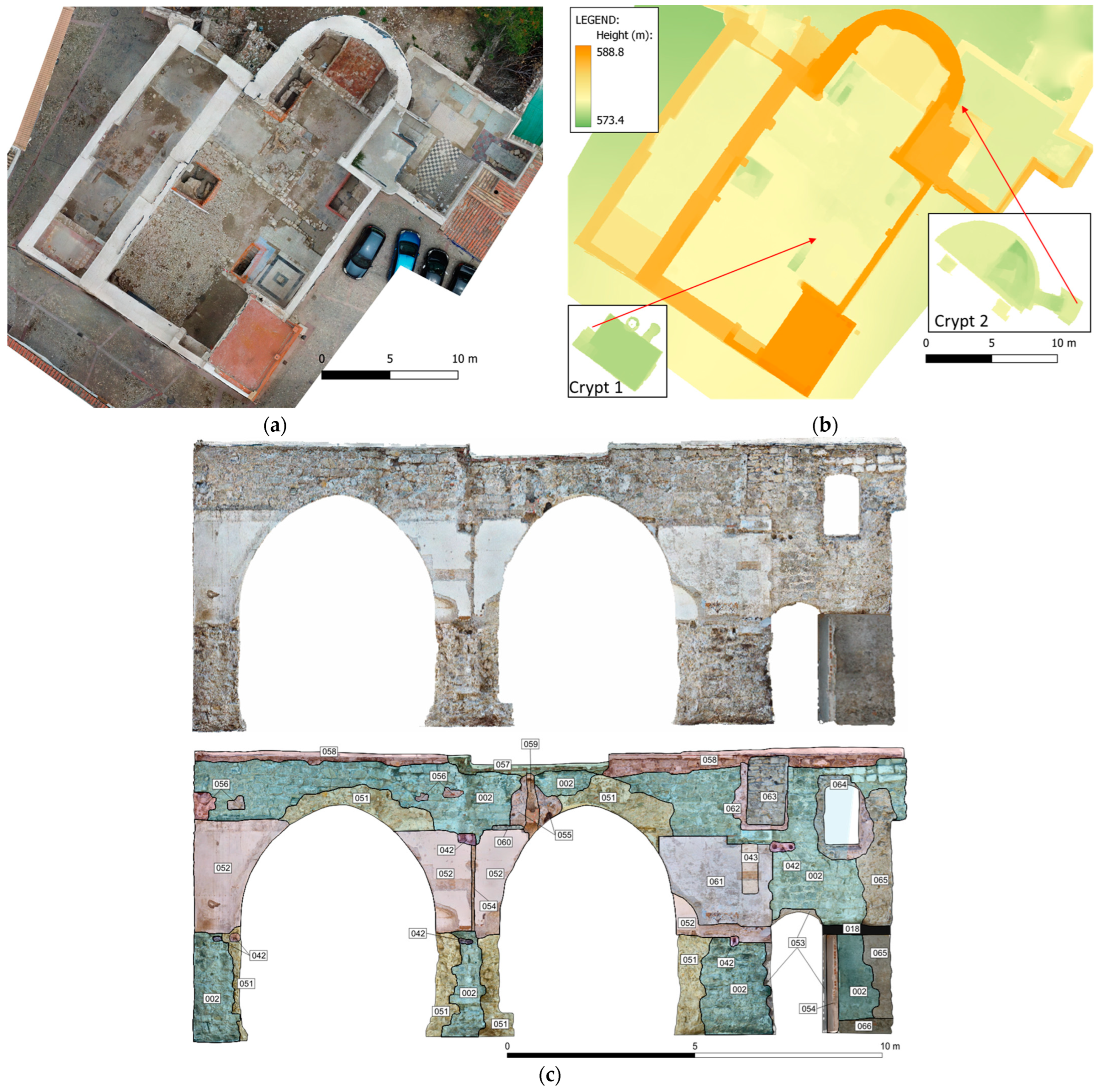
- Photogrammetry was applied using techniques based on three sensors: UAV, CRP, and SP. The goals were to complete the point cloud in zones not covered by the TLS and to obtain a set of oriented images (covering the whole scene) in order to obtain textures and provide information for other products, such as orthoimages. The photogrammetric images were oriented using a set of well-distributed GCPs (GCPs #1). The UAV was essential for covering elevated areas (Figure 4c), where other techniques did not have access. We acquired more than 5100 images of the church, covering most of the scene, except for some complex spaces (e.g., niches). In the case of CRP, we used this technique to cover complex zones using the camera mounted together with an illumination system. In addition, we also acquired photographs of elevated zones using a mast and a remote device to control the camera. In this case, we acquired more than 975 images using this sensor. Photogrammetric surveys with both UAVs and CRP were used to obtain point clouds that guarantee the complete geometry of the church, adding those areas not covered by TLS. In addition, oriented photographs were used to obtain the texture of the object and orthoimages of the main elements. Finally, SP (360-degree camera) was used to complete the object texture in areas not covered by UAVs and CRP. The acquisition was very fast, due to the great coverage provided by the 360-degree images in each shot. We included a camera-mounted 360-degree illumination system to guarantee lighting conditions in indoor areas. In addition, we minimized the need of GCPs for the orientation procedure by using some known constraints (used as scale bars) after the extrinsic calibration of the 360-degree camera (see the example in [7]). The camera was mounted both on a tripod to cover narrow spaces and on the mast to reach elevated zones (Figure 4d). In total, we obtained about 3600 fisheye images, using this sensor at about 600 shooting stations. The image processing (e.g., orientation) of each technique and zone was developed individually and then merged, obtaining, as final products, a point cloud from photogrammetry (Figure 5b) (UAVs and CRP), a complete texture (UAVs, CRP, and SP), and 39 orthoimages (UAVs and CRP) of the main walls of the church. We used a set of well-distributed points to calculate the accuracy of the image orientation, showing different values depending on the zone and the sensor (Table 2). To perform these procedures, we used Agisoft Metashape v.2. The orthoimages were used to develop a stratigraphic study of the main elements of the church. This study was implemented using Autocad v.2021, where the polygons related to each stratigraphic unit were digitized.
2.2. Procedures Developed in the Museum
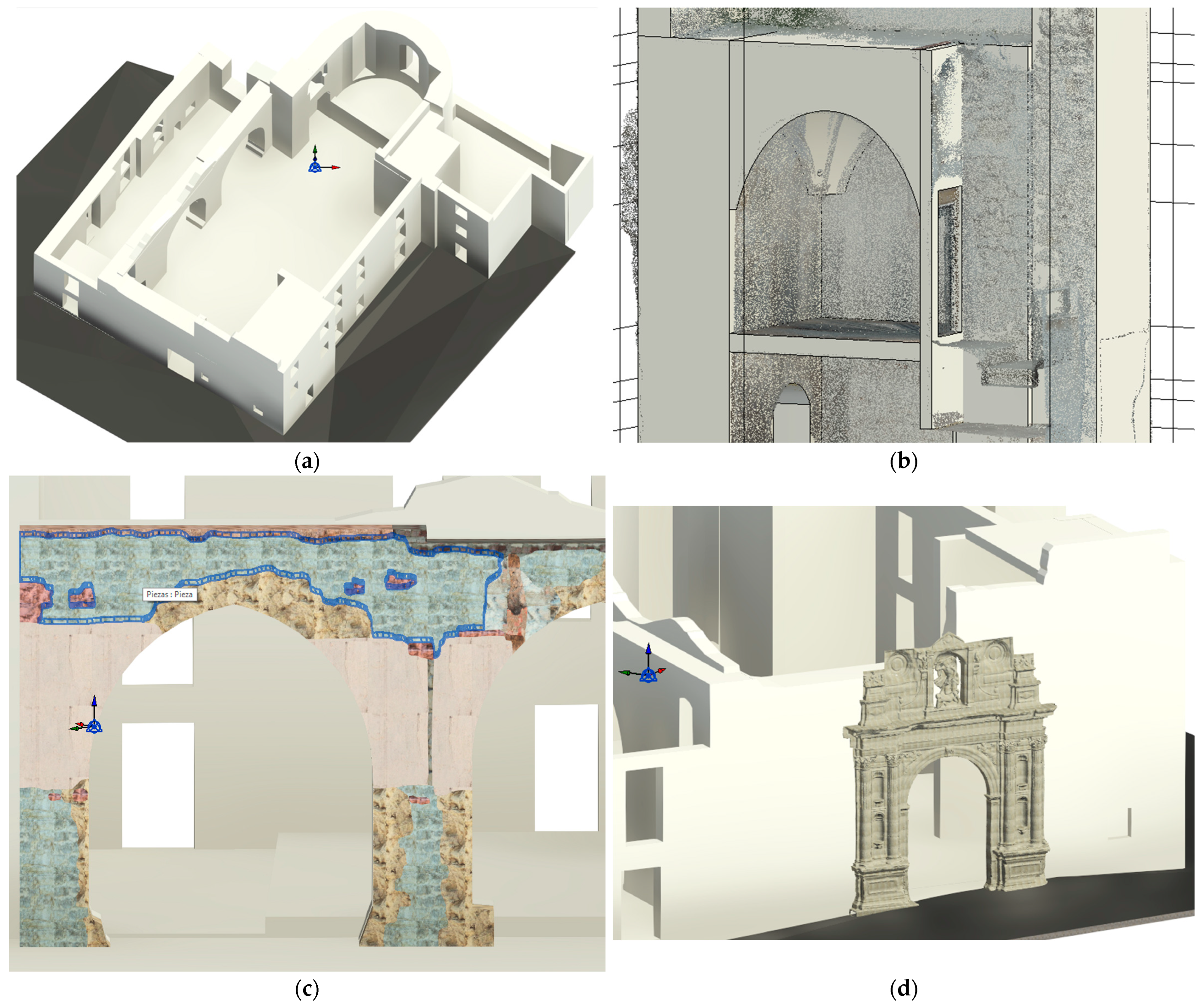
2.3. Procedures for Repositioning
3. Results
4. Discussion
4.1. Application of Geomatic Techniques
4.2. Products
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Kadobayashi, R.; Kochi, N.; Otani, H.; Furukawa, R. Comparison and evaluation of laser scanning and photogrammetry and their combined use for digital recording of cultural heritage. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2004, 35, 401–406. [Google Scholar]
- Guarnieri, A.; Remondino, F.; Vettore, A. Digital photogrammetry and TLS data fusion applied to Cultural Heritage 3D modeling. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2006, 36 Pt 5, 1–6. [Google Scholar]
- Grussenmeyer, P.; Landes, T.; Voegtle, T.; Ringle, K. Comparison methods of terrestrial laser scanning, photogrammetry and tacheometry data for recording of cultural heritage buildings. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2008, XXXVII/B5, 213–218. [Google Scholar]
- Alshawabkeh, Y.; Baik, A.; Miky, Y. Integration of Laser Scanner and Photogrammetry for Heritage BIM Enhancement. ISPRS Int. J. Geo-Inf. 2021, 10, 316. [Google Scholar] [CrossRef]
- Mozas-Calvache, A.T.; Gómez-López, J.M.; Pérez-García, J.L. Multitemporal and Multiscale Applications of Geomatic Techniques to Medium-Sized Archaeological Sites—Case Study of Marroquíes Bajos (Jaén, Spain). Remote Sens. 2023, 15, 1416. [Google Scholar] [CrossRef]
- Pérez-García, J.L.; Mozas-Calvache, A.T.; Gómez-López, J.M.; Vico-García, D. Multiscale 3D Documentation of the Medieval Wall of Jaén (Spain) Based on Multi-Sensor Data Fusion. Heritage 2023, 6, 5952–5966. [Google Scholar] [CrossRef]
- Pérez-García, J.L.; Gómez-López, J.M.; Mozas-Calvache, A.T.; Delgado-García, J. Analysis of the Photogrammetric Use of 360-Degree Cameras in Complex Heritage-Related Scenes: Case of the Necropolis of Qubbet el-Hawa (Aswan Egypt). Sensors 2024, 24, 2268. [Google Scholar] [CrossRef]
- Perfetti, L.; Polari, C.; Fassi, F. Fisheye Photogrammetry: Tests and Methodologies for the Survey of Narrow Spaces. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W3, 573–580. [Google Scholar] [CrossRef]
- Bruno, N.; Perfetti, L.; Fassi, F.; Roncella, R. Photogrammetric survey of narrow spaces in cultural heritage: Comparison of two multi-camera approaches. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XLVIII-2/W4-2024, 87–94. [Google Scholar] [CrossRef]
- Mozas-Calvache, A.T.; Pérez-García, J.L.; Cardernal-Escarcena, F.J.; Delgado, J.; Mata de Castro, E. Comparison of Low Altitude Photogrammetric Methods for Obtaining Dems and Orthoimages of Archaeological Sites. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B5, 577–581. [Google Scholar] [CrossRef]
- Martínez, S.; Ortiz, J.; Gil, M.L.; Rego, M.T. Recording complex structures using close range photogrammetry: The cathedral of Santiago de Compostela. Photogramm. Rec. 2013, 28, 375–395. [Google Scholar] [CrossRef]
- Fiorillo, F.; Limongiello, M.; Fernández-Palacios, B.J. Testing GoPro for 3D model reconstruction in narrow spaces. Acta IMEKO 2016, 5, 64–70. [Google Scholar] [CrossRef]
- Mozas-Calvache, A.T.; Pérez-García, J.L.; Gómez-López, J.M.; Martínez de Dios, J.L.; Jiménez-Serrano, A. 3D models of the QH31, QH32 and QH33 tombs in Qubbet el Hawa (Aswan, Egypt). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIII-B2-2020, 1427–1434. [Google Scholar] [CrossRef]
- Lichti, D.D.; Tredoux, W.; Maalek, R.; Helmholz, P.; Radovanovic, R. Modelling extreme wide-angle lens cameras. Photogramm. Rec. 2021, 36, 360–380. [Google Scholar] [CrossRef]
- Boulianne, M.; Nolette, C.; Agnard, J.P.; Brindamour, M. Hemispherical photographs used for mapping confined spaces. Photogramm. Eng. Remote Sens. 1997, 63, 1103–1108. [Google Scholar]
- Kedzierski, M.; Waczykowski, P. Fisheye lens camera system application to cultural heritage data acquisition. In Proceedings of the XXI International Cipa Symposium, Athens, Greece, 1–6 October 2007. [Google Scholar]
- Kedzierski, M.; Fryskowska, A. Application of digital camera with fisheye lens in close range photogrammetry. In Proceedings of the ASPRS 2009 Annual Conference, Baltimore, MD, USA, 9–13 March 2009. [Google Scholar]
- Georgantas, A.; Brédif, M.; Pierrot-Desseilligny, M. An accuracy assessment of automated photogrammetric techniques for 3D modelling of complex interiors. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2012, XXXIX-B3, 23–28. [Google Scholar] [CrossRef]
- Covas, J.; Ferreira, V.; Mateus, L. 3D reconstruction with fisheye images strategies to survey complex heritage buildings. In Proceedings of the Digital Heritage 2015, Granada, Spain, 28 September–2 October 2015. [Google Scholar]
- Mandelli, A.; Fassi, F.; Perfetti, L.; Polari, C. Testing different survey techniques to model architectonic narrow spaces. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W5, 505–511. [Google Scholar] [CrossRef]
- Perfetti, L.; Polari, C.; Fassi, F. Fisheye Multi-Camera System Calibration for Surveying Narrow and Complex Architectures. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 877–883. [Google Scholar] [CrossRef]
- Alessandri, L.; Baiocchi, V.; Del Pizzo, S.; Rolfo, M.F.; Troisi, S. Photogrammetric survey with fisheye lens for the characterization of the la Sassa cave. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W9, 25–32. [Google Scholar] [CrossRef]
- León-Vega, H.A.; Rodríguez-Laitón, M.I. Fisheye Lens Image Capture Analysis for Indoor 3d Reconstruction and Evaluation. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 179–186. [Google Scholar] [CrossRef]
- Perfetti, L.; Fassi, F.; Rossi, C. Fisheye Photogrammetry to Generate Low–Cost DTMs. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W17, 257–263. [Google Scholar] [CrossRef]
- Pérez Ramos, A.; Robleda Prieto, G. Only image based for the 3D metric survey of gothic structures by using frame cameras and panoramic cameras. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2016, XLI-B5, 363–370. [Google Scholar] [CrossRef]
- Kossieris, S.; Kourounioti, O.; Agrafiotis, P.; Georgopoulos, A. Developing a low-cost system for 3D data acquisition. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2/W8, 119–126. [Google Scholar] [CrossRef]
- Barazzetti, L.; Previtali, M.; Roncoroni, F. 3D Modelling with the Samsung Gear 360. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2017, XLII-2-W3, 85–90. [Google Scholar] [CrossRef]
- Barazzetti, L.; Previtali, M.; Roncoroni, F. Can we use low-cost 360 degree cameras to create accurate 3D models? Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 69–75. [Google Scholar] [CrossRef]
- Fangi, G.; Pierdicca, R.; Sturari, M.; Malinverni, E.S. Improving spherical photogrammetry using 360° omni-cameras: Use cases and new applications. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2018, XLII-2, 331–337. [Google Scholar] [CrossRef]
- Barazzetti, L.; Previtali, M.; Roncoroni, F.; Valente, R. Connecting inside and outside through 360° imagery for close-range photogrammetry. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2019, XLII-2/W9, 87–92. [Google Scholar] [CrossRef]
- Cantatore, E.; Lasorella, M.; Fatiguso, F. Virtual reality to support technical knowledge in cultural heritage. The case study of cryptoporticus in the archaeological site of Egnatia (Italy). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIV-M-1-2020, 465–472. [Google Scholar] [CrossRef]
- Bertellini, B.; Gottardi, C.; Vernier, P. 3D survey techniques for the conservation and the enhancement of a Venetian historical architecture. Appl. Geomat. 2019, 12, 53–68. [Google Scholar] [CrossRef]
- Fangi, G. The multi-image spherical panoramas as a tool for architectural survey. In Proceedings of the 21st CIPA Symposi-um, Athens, Greece, 1–6 October 2007. [Google Scholar]
- Rodríguez-Gonzálvez, P.; Jiménez Fernández-Palacios, B.; Muñoz-Nieto, Á.L.; Arias-Sanchez, P.; Gonzalez-Aguilera, D. Mobile LiDAR System: New Possibilities for the Documentation and Dissemination of Large Cultural Heritage Sites. Remote Sens. 2017, 9, 189. [Google Scholar] [CrossRef]
- Sammartano, G.; Spanò, A. Point clouds by SLAM-based mobile mapping systems: Accuracy and geometric content validation in multisensor survey and stand-alone acquisition. Appl. Geomat. 2018, 10, 317–339. [Google Scholar] [CrossRef]
- Di Stefano, F.; Chiappini, S.; Gorreja, A.; Balestra, M.; Pierdicca, R. Mobile 3D scan LiDAR: A literature review. Geomat. Nat. Hazards Risk 2021, 12, 2387–2429. [Google Scholar] [CrossRef]
- Di Stefano, F.; Torresani, A.; Farella, E.M.; Pierdicca, R.; Menna, F.; Remondino, F. 3D Surveying of Underground Built Heritage: Opportunities and Challenges of Mobile Technologies. Sustainability 2021, 13, 13289. [Google Scholar] [CrossRef]
- Elhashash, M.; Albanwan, H.; Qin, R. A Review of Mobile Mapping Systems: From Sensors to Applications. Sensors 2022, 22, 4262. [Google Scholar] [CrossRef] [PubMed]
- Campi, M.; Falcone, M.; Sabbatini, S. Towards continuous monitoring of architecture. Terrestrial laser scanning and mobile mapping system for the diagnostic phases of the cultural heritage. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2022, XLVI-2/W1-2022, 121–127. [Google Scholar] [CrossRef]
- Tanduo, B.; Teppati Losè, L.; Chiabrando, F. Documentation of complex environments in cultural heritage sites. A SLAM-based survey in the Castello del Valentino basement. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2023, XLVIII-1/W, 489–496. [Google Scholar] [CrossRef]
- Torresani, A.; Menna, F.; Battisti, R.; Remondino, F. A V-SLAM Guided and Portable System for Photogrammetric Applications. Remote Sens. 2021, 13, 2351. [Google Scholar] [CrossRef]
- Bonfanti, C.; Patrucco, G.; Perri, S.; Sammartano, G.; Spanò, A. A New Indoor LiDAR-Based MMS Challenging Complex Architectural Environments. Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2021, XLVI-M-1–2, 79–86. [Google Scholar]
- Ortiz, J.; Gil, M.L.; Martínez, S.; Rego, T.; Meijide, G. Three-dimensional Modelling of Archaeological Sites Using Close-range Automatic Correlation Photogrammetry and Low-altitude Imagery. Archaeol. Prospect. 2013, 20, 205–217. [Google Scholar] [CrossRef]
- Blockley, P.; Morandi, S. The recording of two late Roman towers, Archaeological Museum, Milan 3D documentation and study using image-based modelling. In Proceedings of the Digital Heritage 2015, Granada, Spain, 28 September 2015. [Google Scholar]
- Pérez-García, J.L.; Mozas-Calvache, A.T.; Gómez-López, J.M.; Jiménez-Serrano, A. Three-dimensional modelling of large archaeological sites using images obtained from masts. Application to Qubbet el-Hawa site (Aswan, Egypt). Archaeol. Prospect. 2018, 26, 121–135. [Google Scholar] [CrossRef]
- Pérez-García, J.L.; Mozas-Calvache, A.T.; Barba-Colmenero, V.; Jiménez-Serrano, A. Photogrammetric studies of inaccessible sites in archaeology: Case study of burial chambers in Qubbet el-Hawa (Aswan, Egypt). J. Archaeol. Sci. 2019, 102, 1–10. [Google Scholar]
- Colomina, I.; Molina, P. Unmanned aerial systems for photogrammetry and remote sensing: A review. ISPRS J. Photogramm. Remote Sens. 2014, 92, 79–97. [Google Scholar] [CrossRef]
- Nex, F.; Remondino, F. UAV for 3D mapping applications: A review. Appl. Geomat. 2014, 6, 1–15. [Google Scholar] [CrossRef]
- Campana, S. Drones in Archaeology. State-of-the-art and Future Perspectives. Archaeol. Prospect. 2017, 24, 275–296. [Google Scholar] [CrossRef]
- Pepe, M.; Alfio, V.S.; Costantino, D. UAV Platforms and the SfM-MVS Approach in the 3D Surveys and Modelling: A Review in the Cultural Heritage Field. Appl. Sci. 2022, 12, 12886. [Google Scholar] [CrossRef]
- Ullman, S. The interpretation of structure from motion. Proc. Royal Soc. B 1979, 203, 405–426. [Google Scholar]
- Koenderink, J.J.; Van Doorn, A.J. Affine structure from motion. J. Opt. Soc. Am. A 1991, 8, 377–385. [Google Scholar] [CrossRef]
- Lowe, D.G. Distinctive image features from scale-invariant keypoints. Int. J. Comput. Vis. 2004, 60, 91–110. [Google Scholar] [CrossRef]
- Szeliski, R. Computer Vision: Algorithms and Applications; Springer: London, UK, 2011. [Google Scholar]
- Scharstein, D.; Szeliski, R. A taxonomy and evaluation of dense two-frame stereo correspondence algorithms. Int. J. Comput. Vis. 2002, 47, 7–42. [Google Scholar] [CrossRef]
- Seitz, S.M.; Curless, B.; Diebel, J.; Scharstein, D.; Szeliski, R. A comparison and evaluation of multi-view stereo reconstruction algorithms. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition, New York, NY, USA, 17 June 2006. [Google Scholar]
- Furukawa, Y.; Hernández, C. Multi-view stereo: A tutorial. Found. Trends Comput. Graph. Vis. 2015, 9, 1–148. [Google Scholar] [CrossRef]
- Pietroni, E.; Ferdani, D. Virtual Restoration and Virtual Reconstruction in Cultural Heritage: Terminology, Methodologies, Visual Representation Techniques and Cognitive Models. Information 2021, 12, 167. [Google Scholar] [CrossRef]
- Ergin, İ.D.A. Digital Approach in Conservation of Heritage: 3D Virtual Reconstruction Applications in Ancient Cities. J. Archit. Sci. Appl. 2023, 8, 969–987. [Google Scholar]
- Liu, J.; Azhar, S.; Willkens, D.; Li, B. Static Terrestrial Laser Scanning (TLS) for Heritage Building Information Modeling (HBIM): A Systematic Review. Virtual Worlds 2023, 2, 90–114. [Google Scholar] [CrossRef]
- Talon, A.; Cauvin, C.; Chateauneuf, A. State of the Art of HBIM to Develop the HBIM of the Heritage Care Project. Int. J. 3-D Inf. Model. 2017, 6, 33–43. [Google Scholar]
- Scianna, A.; Gaglio, G.F.; Grima, R.; La Guardia, M. The virtualization of CH for historical reconstruction: The AR fruition of the fountain of St. George square in Valletta (Malta). Int. Arch. Photogramm. Remote Sens. Spat. Inf. Sci. 2020, XLIV-4/W1-2020, 143–149. [Google Scholar] [CrossRef]
- Agnello, F.; Cannella, M. Ruined Archeological Heritage. Survey, 3D Modeling, Virtual Anastylosis. Int. J. Herit. Digit. Era 2013, 2, 419–432. [Google Scholar] [CrossRef]
- Abualdenien, J.; Borrmann, A. Levels of detail, development, definition, and information need: A critical literature review. J. Inf. Technol. Constr. 2022, 27, 363–392. [Google Scholar] [CrossRef]
- Mozas-Calvache, A.T.; Pérez-García, J.L.; Gómez-López, J.M. Geometrical study of Middle Kingdom funerary complexes in Qubbet el-Hawa (Aswan, Egypt) based on 3D models. Virtual Archaeol. Rev. 2022, 14, 1–18. [Google Scholar] [CrossRef]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technique | Sensor | Description |
|---|---|---|
| TLS | Faro Focus X130 (Lake Mary, FL, USA) | Mid-range laser scanner that captures 360 scenes in a few minutes |
| MMS | Leica BLK2GO (Heerbrugg, Switzerland) | Handheld imaging laser scanner that captures images and point clouds in real time (SLAM) |
| UAV | DJI Mini 2 (Shenzhen, China) | Takeoff weight of less than 250 gr. Mounted with a 12 MP camera that captures 4000 × 3000 images |
| CRP | Sony alpha 6000 (Tokyo, Japan) | Camera with a lens of 16 mm that captures images of 6000 × 4000 pixels |
| SP | Kandao Obsidian Go (Shenzhen, China) | 360-degree camera, composed of 6 fisheye lenses, which captures images of 4608 × 3456 pixels |
| Sensor | Zone | RMSE (m) |
|---|---|---|
| UAV | General | 0.002 |
| UAV-CRP | Church walls | 0.005 |
| CRP | Crypts and chapel | 0.002 |
| 360-degree | Church walls | 0.010 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Mozas-Calvache, A.T.; Gómez-López, J.M.; Pérez-García, J.L.; Vico-García, D.; Barba-Colmenero, V.; Fernández-Ordóñez, A. Multi-Sensor Geomatic Techniques for the 3D Documentation and Virtual Repositioning of Elements of the Church of S. Miguel (Jaén, Spain). Heritage 2024, 7, 2924-2943. https://doi.org/10.3390/heritage7060137
Mozas-Calvache AT, Gómez-López JM, Pérez-García JL, Vico-García D, Barba-Colmenero V, Fernández-Ordóñez A. Multi-Sensor Geomatic Techniques for the 3D Documentation and Virtual Repositioning of Elements of the Church of S. Miguel (Jaén, Spain). Heritage. 2024; 7(6):2924-2943. https://doi.org/10.3390/heritage7060137
Chicago/Turabian StyleMozas-Calvache, Antonio Tomás, José Miguel Gómez-López, José Luis Pérez-García, Diego Vico-García, Vicente Barba-Colmenero, and Alberto Fernández-Ordóñez. 2024. "Multi-Sensor Geomatic Techniques for the 3D Documentation and Virtual Repositioning of Elements of the Church of S. Miguel (Jaén, Spain)" Heritage 7, no. 6: 2924-2943. https://doi.org/10.3390/heritage7060137