

A Frequency-Independent Phase Shifter



Abstract
1. Introduction
2. Materials and Methods
3. Results
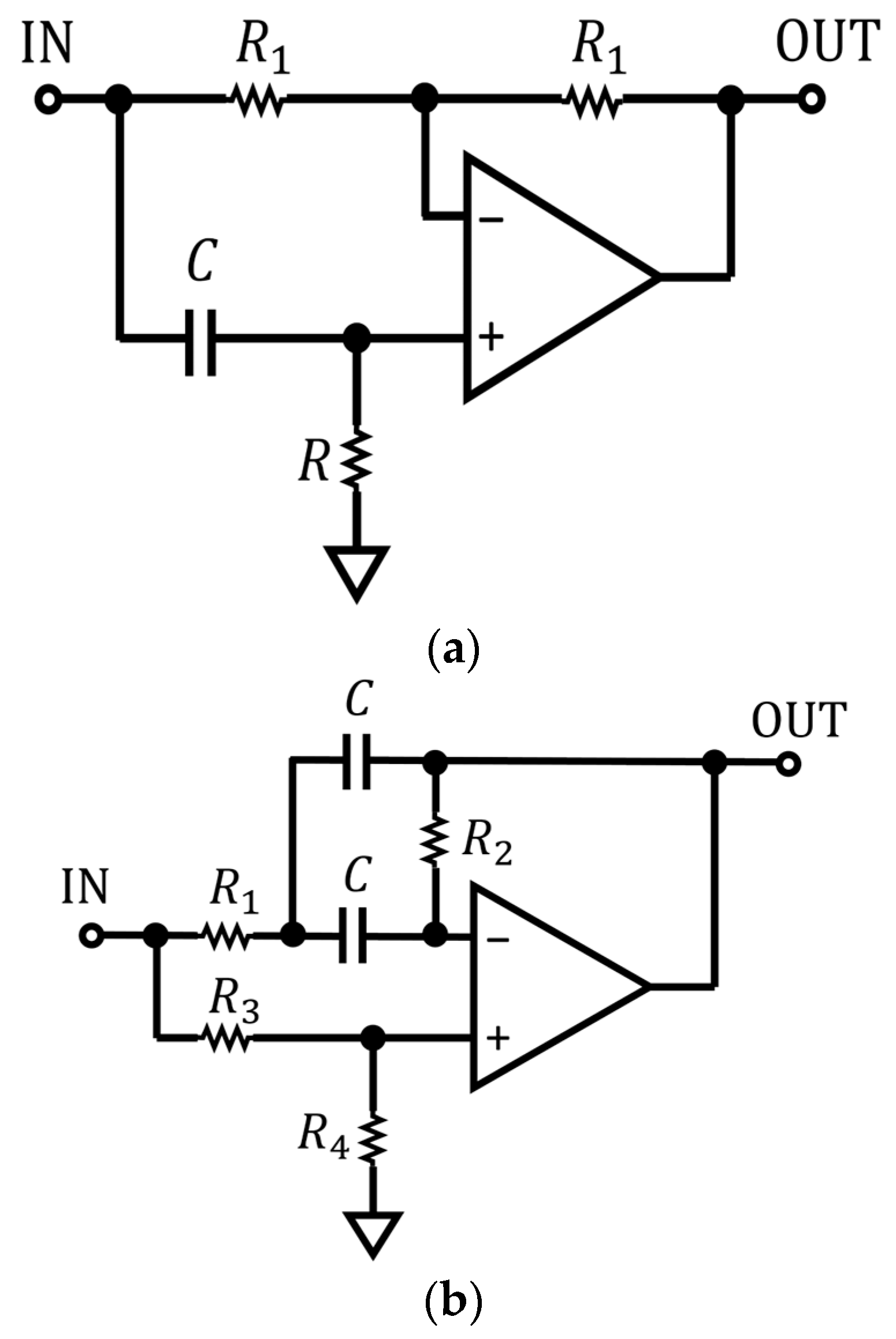
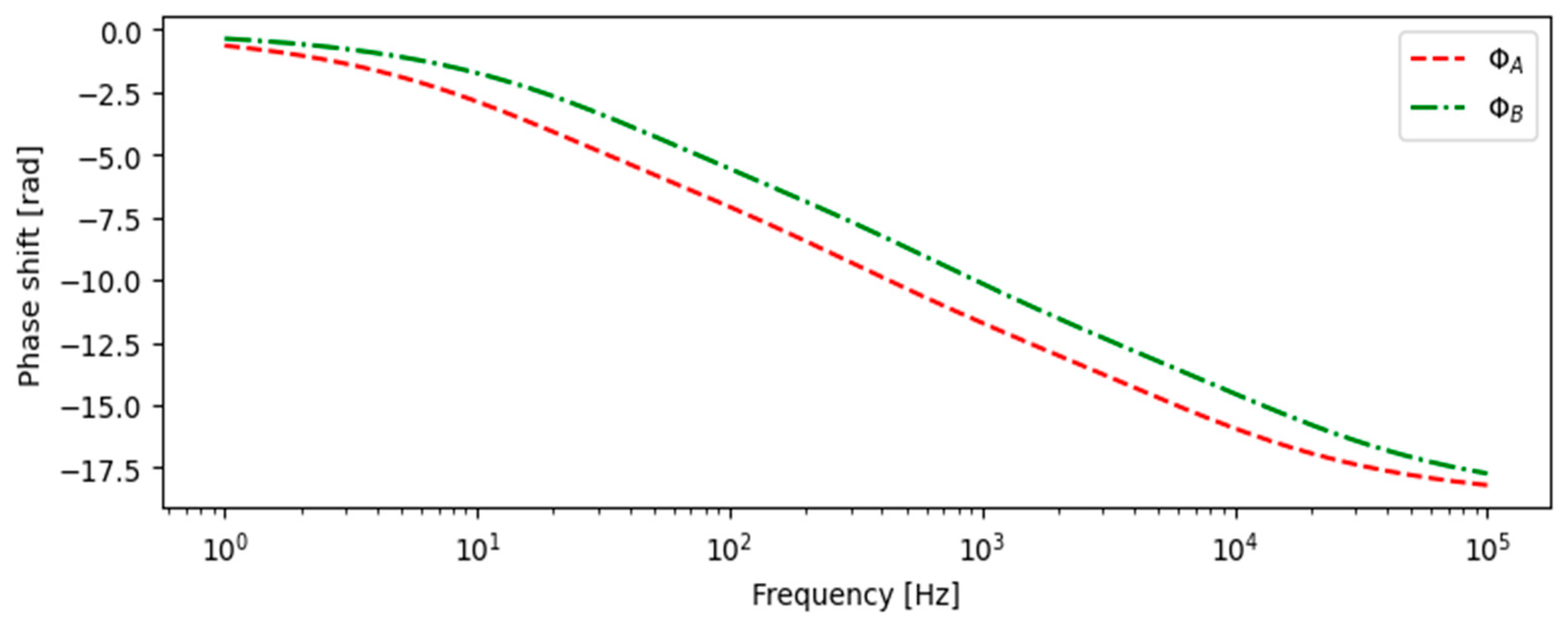
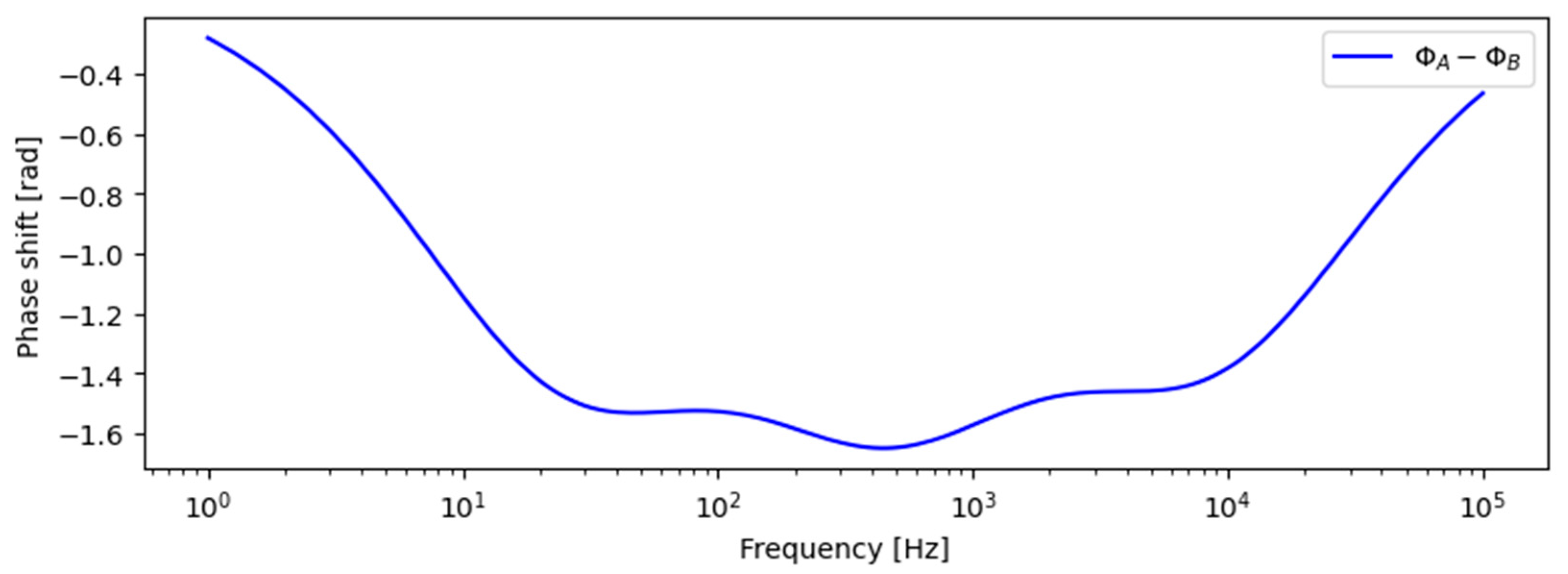
3.1. Numerical Optimization of a Single-Stage Filter
3.2. Analytic Calculations for the Single Stage Filter
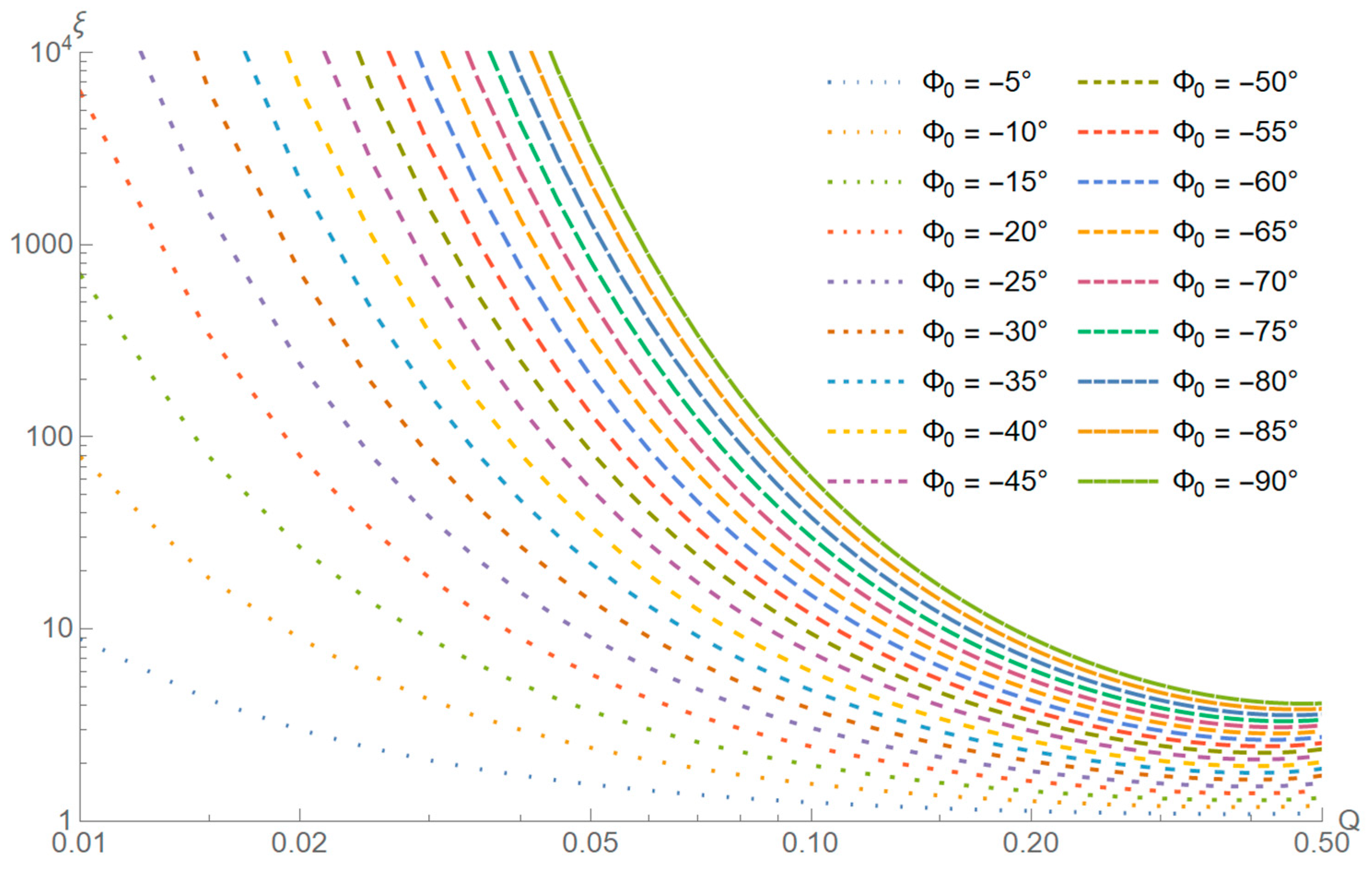
3.3. Analytical Optimization for the Single-Stage Filter
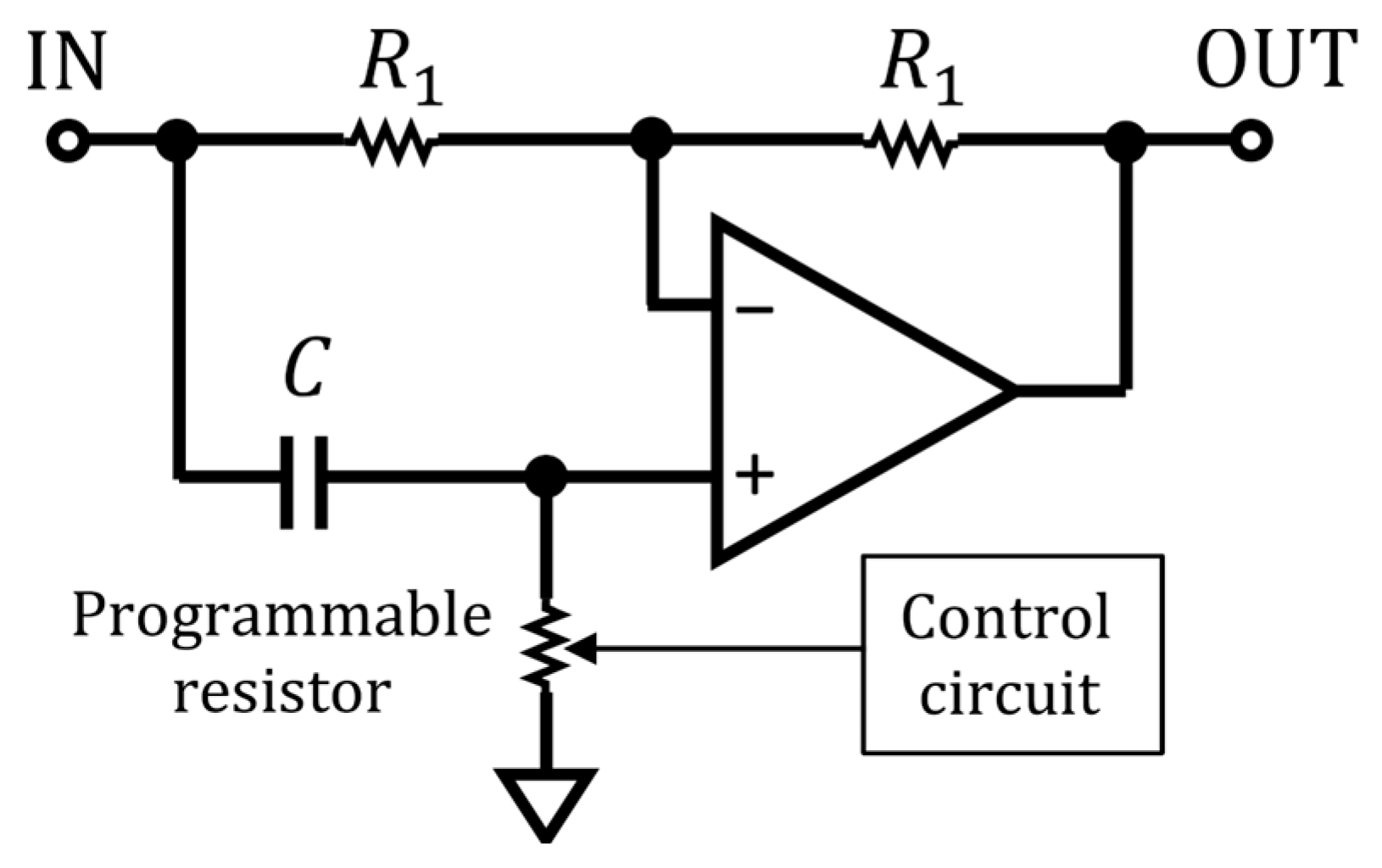
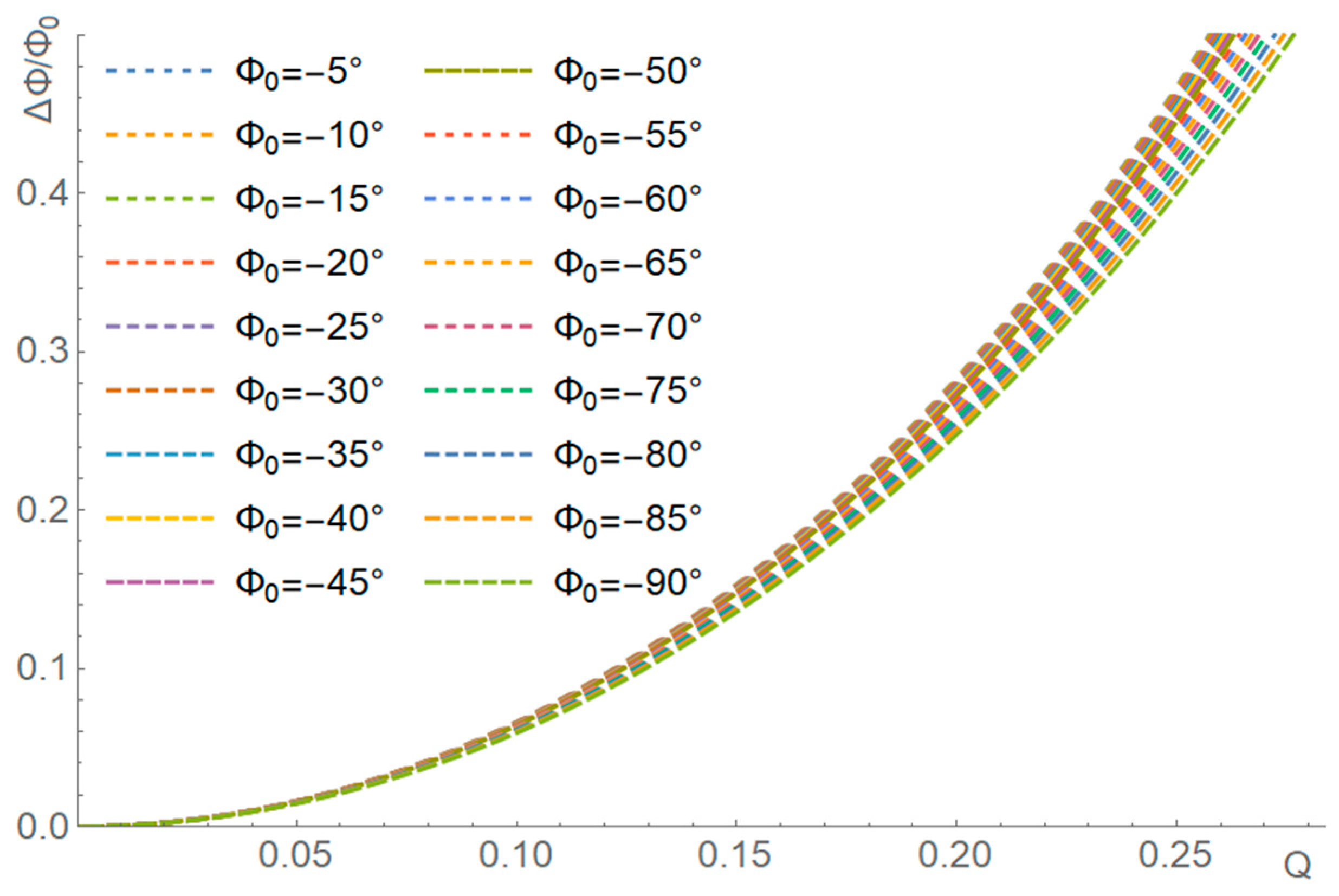
3.4. Approximative Method for the Analytical Solution of the Single-Stage Filter
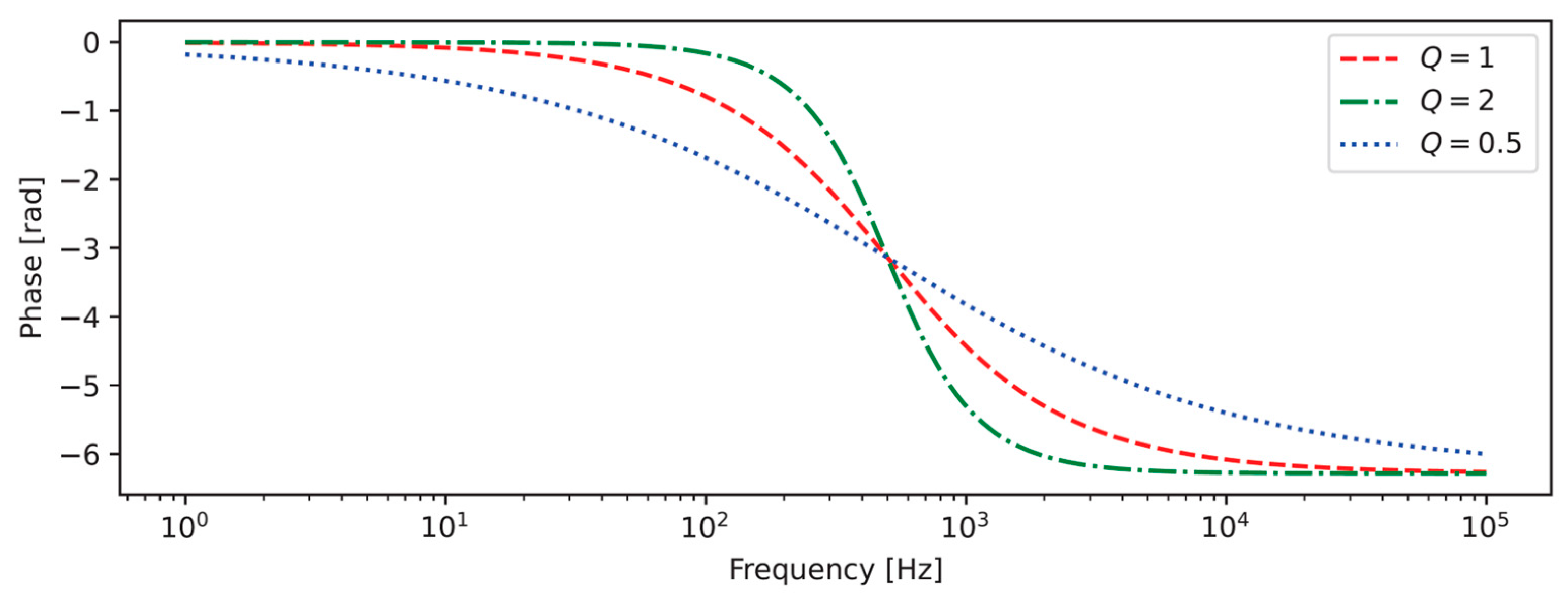
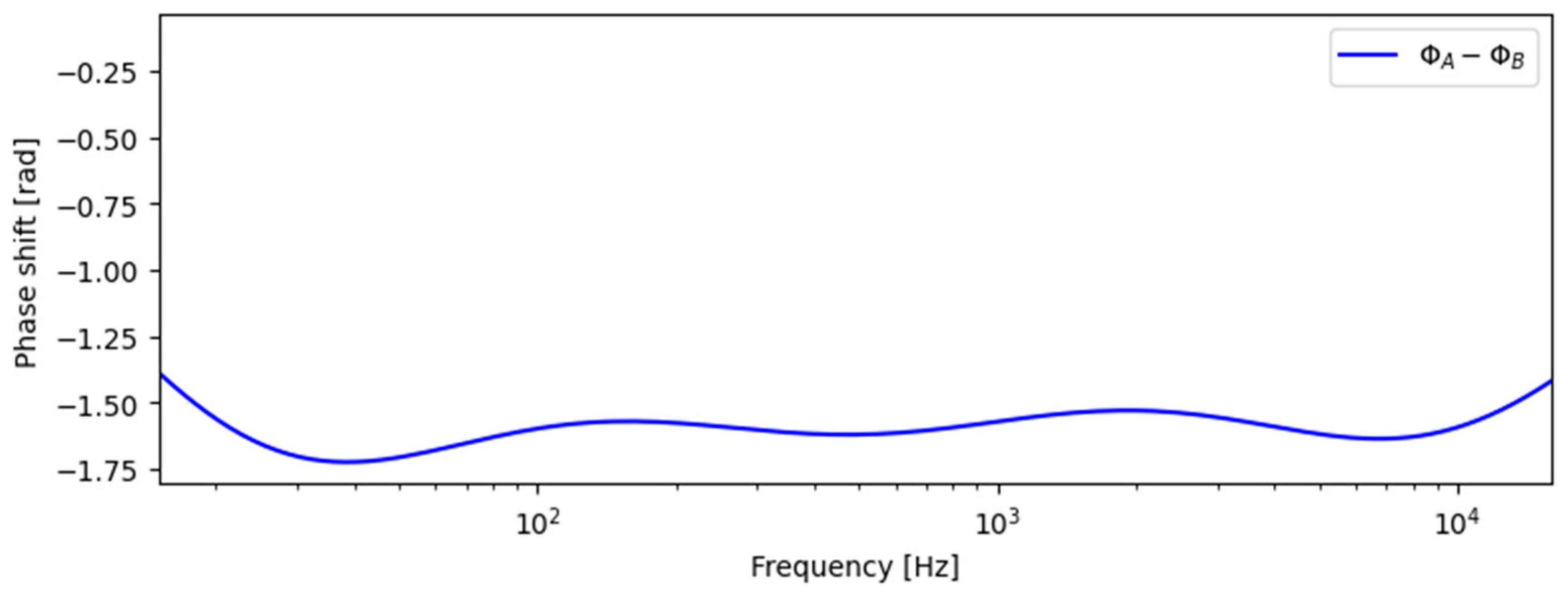
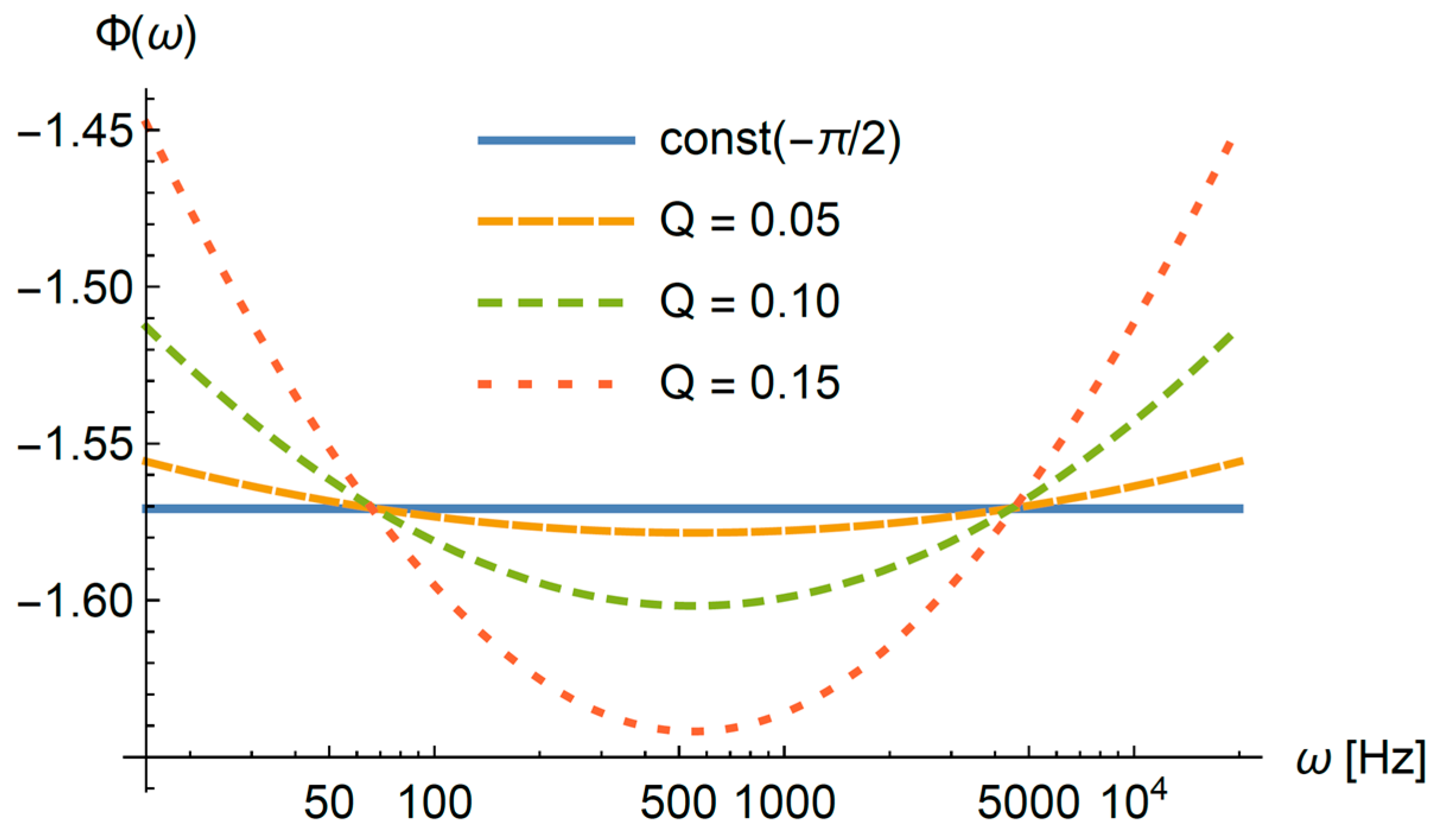
3.5. Numerical Solution of the Approximative Case for the Single-Stage Filter
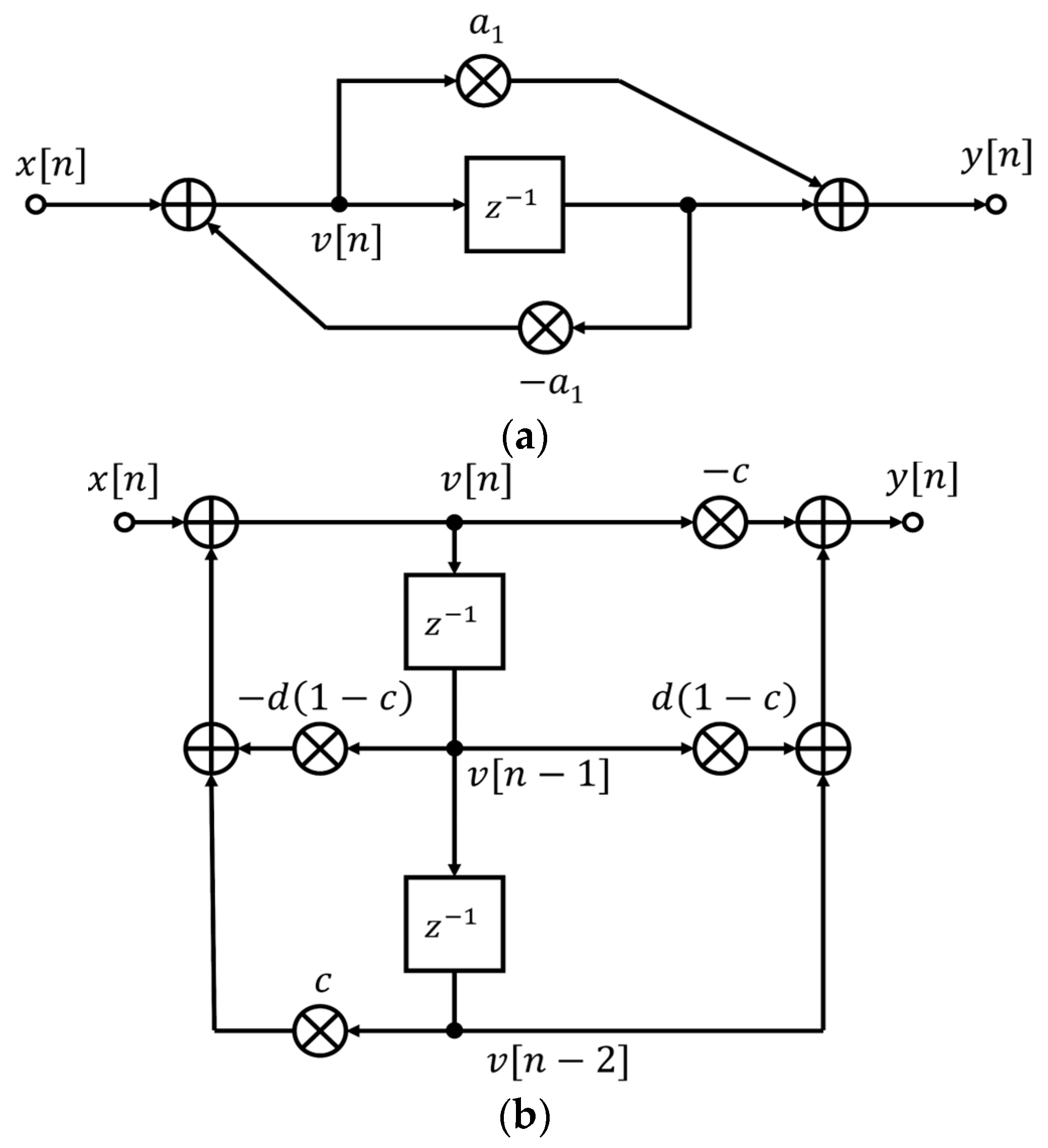
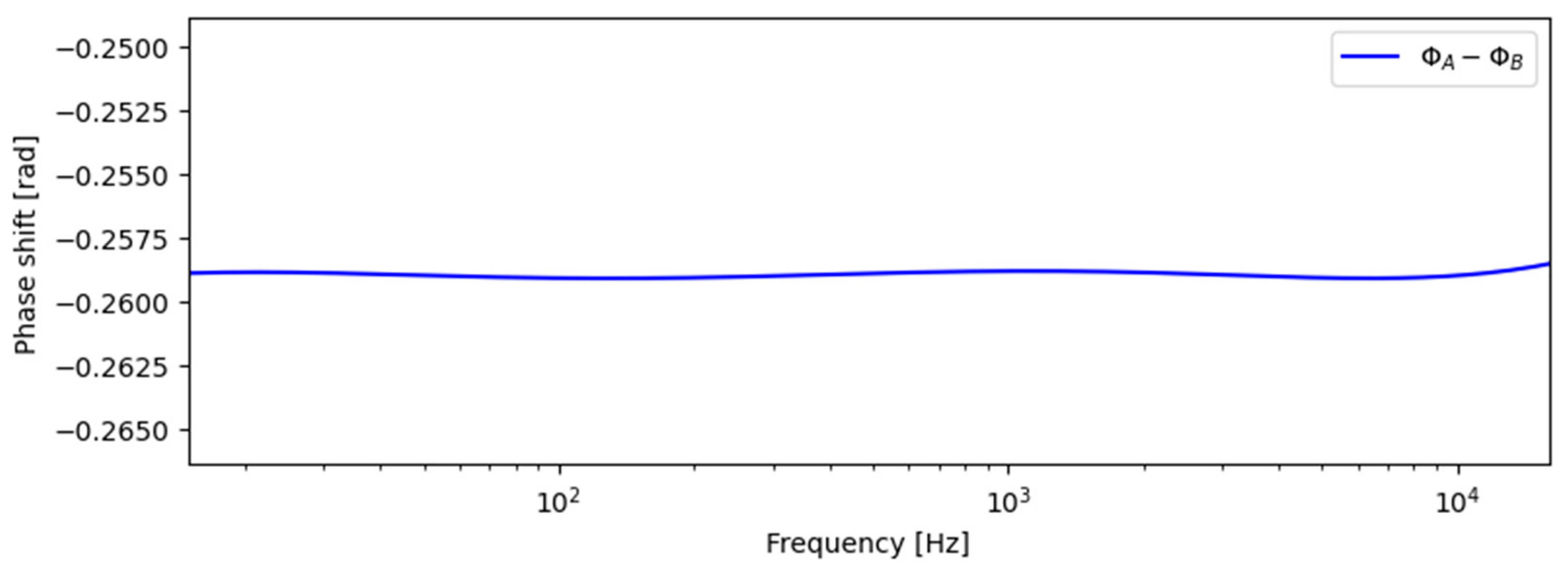
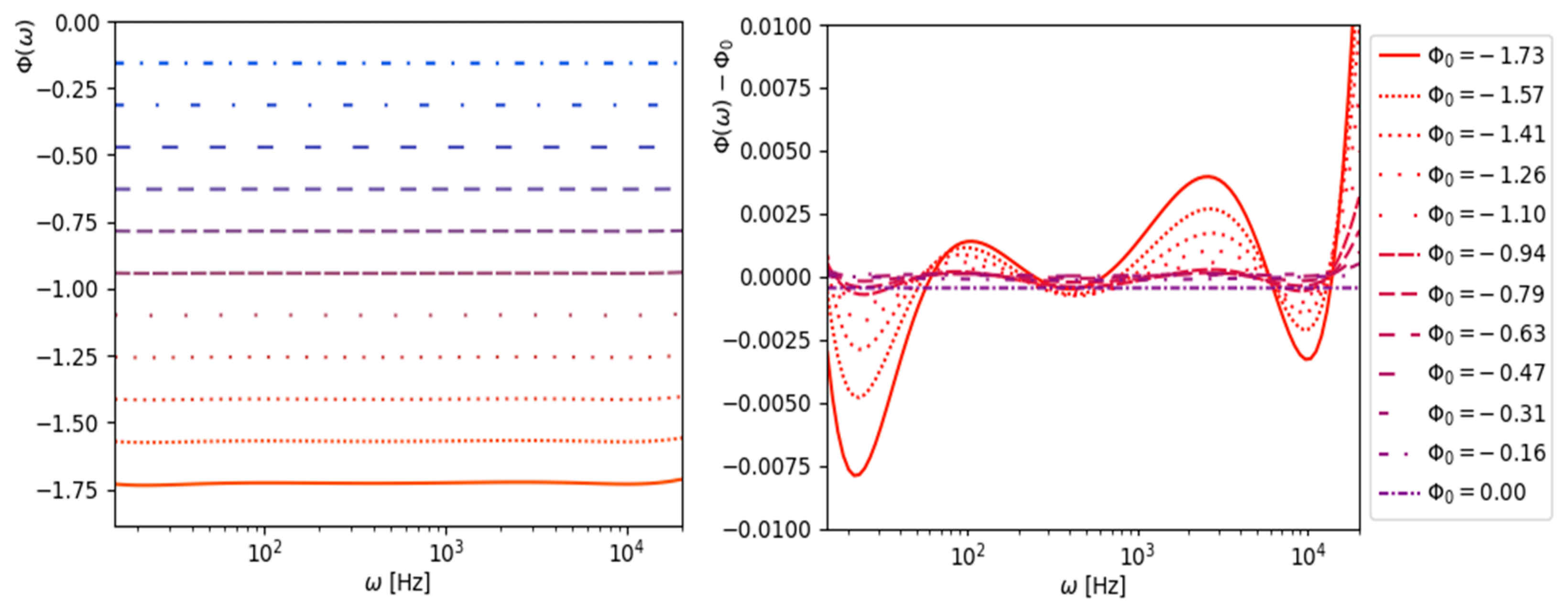
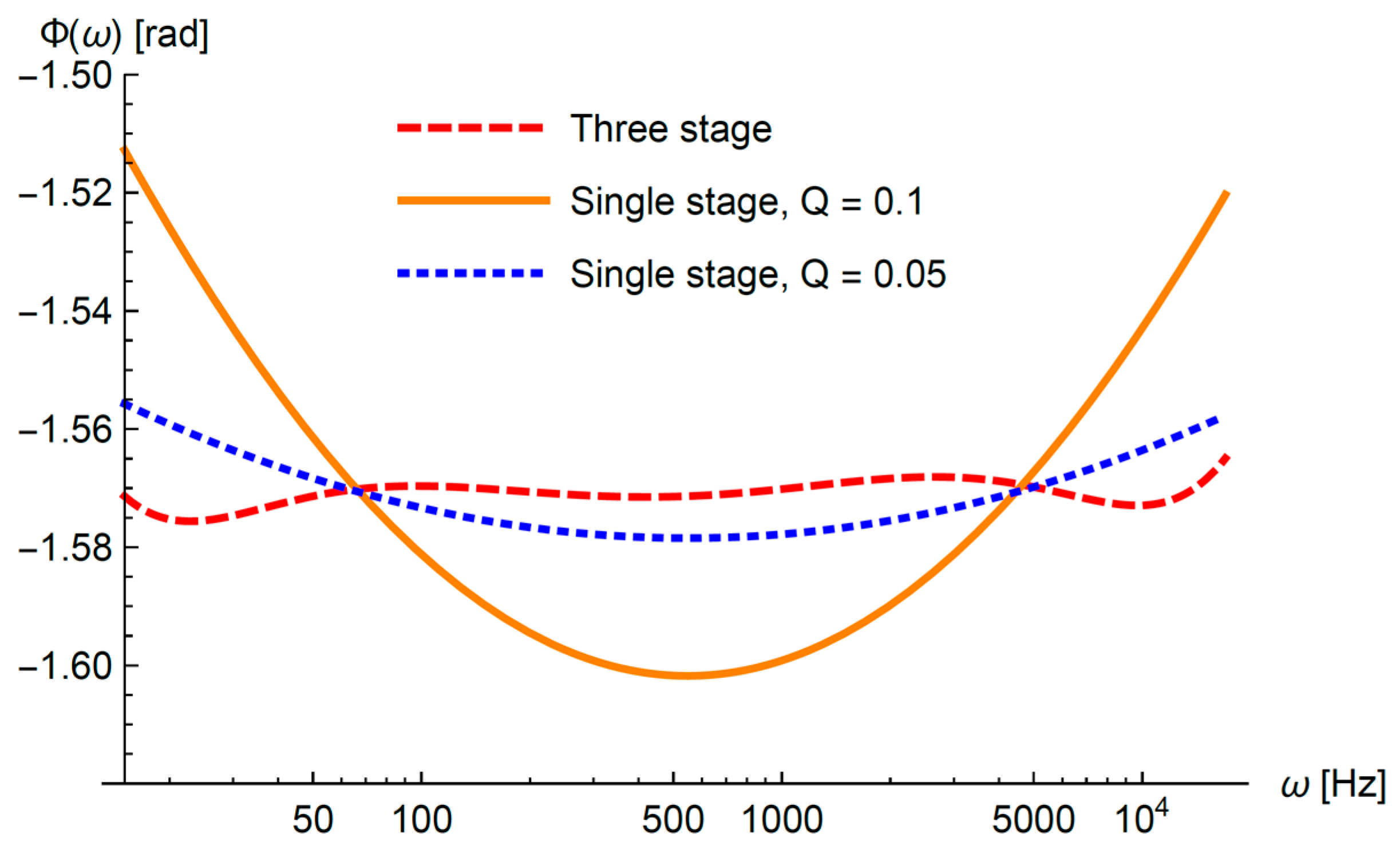
3.6. Numerical Solution for the Three-Stage Filter
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.01 | 3.27⋅1017 | 0.11 | 42.868 | 0.21 | 8.2220 | 0.31 | 4.9613 | 0.41 | 4.1762 | 0.01 | 3.27⋅1017 |
| 0.02 | 5.79⋅108 | 0.12 | 31.865 | 0.22 | 7.6131 | 0.32 | 4.8259 | 0.42 | 4.1470 | 0.02 | 5.79⋅108 |
| 0.03 | 7.04⋅105 | 0.13 | 24.828 | 0.23 | 7.1045 | 0.33 | 4.7072 | 0.43 | 4.1238 | 0.03 | 7.04⋅105 |
| 0.04 | 24,664 | 0.14 | 20.075 | 0.24 | 6.6755 | 0.34 | 4.6033 | 0.44 | 4.1062 | 0.04 | 24,664 |
| 0.05 | 3312.5 | 0.15 | 16.720 | 0.25 | 6.3107 | 0.35 | 4.5126 | 0.45 | 4.0938 | 0.05 | 3312.5 |
| 0.06 | 871.16 | 0.16 | 14.267 | 0.26 | 5.9982 | 0.36 | 4.4334 | 0.46 | 4.0861 | 0.06 | 871.16 |
| 0.07 | 336.39 | 0.17 | 12.418 | 0.27 | 5.7289 | 0.37 | 4.3647 | 0.47 | 4.0828 | 0.07 | 336.39 |
| 0.08 | 165.13 | 0.18 | 10.990 | 0.28 | 5.4957 | 0.38 | 4.3055 | 0.48 | 4.0836 | 0.08 | 165.13 |
| 0.09 | 95.137 | 0.19 | 9.8635 | 0.29 | 5.2929 | 0.39 | 4.2548 | 0.49 | 4.0881 | 0.09 | 95.137 |
| 0.1 | 61.311 | 0.2 | 8.9592 | 0.3 | 5.1160 | 0.4 | 4.2119 | 0.5 | 4.0960 | 0.1 | 61.311 |
Appendix B
| [rad] | [Hz] | [Hz] | [Hz] | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| −5° | −0.08727 | −0.08652 | 0.87347 | 0.00576 | 0.87347 | 1.0000 | 44.5951 | 1.0000 | 10.668 | 475.75 | 21,215 |
| −10° | −0.17453 | −0.17266 | 0.87347 | 0.01150 | 0.87347 | 1.0000 | 44.5951 | 1.0000 | 10.668 | 475.74 | 21,215 |
| −15° | −0.26180 | −0.25889 | 0.87347 | 0.01724 | 0.87347 | 1.0001 | 44.5951 | 1.0001 | 10.668 | 475.68 | 21,215 |
| −20° | −0.34907 | −0.34524 | 0.87347 | 0.02300 | 0.87347 | 1.0003 | 44.5951 | 1.0003 | 10.668 | 475.57 | 21,215 |
| −25° | −0.43633 | −0.43172 | 0.87347 | 0.02876 | 0.87347 | 1.0007 | 44.5951 | 1.0007 | 10.668 | 475.40 | 21,215 |
| −30° | −0.52360 | −0.51836 | 0.87347 | 0.03453 | 0.87347 | 1.0012 | 44.5951 | 1.0013 | 10.668 | 475.14 | 21,215 |
| −35° | −0.61087 | −0.60518 | 0.87347 | 0.04031 | 0.87347 | 1.0019 | 44.5951 | 1.0020 | 10.668 | 474.79 | 21,215 |
| −40° | −0.69813 | −0.69219 | 0.87347 | 0.04610 | 0.87347 | 1.0029 | 44.5951 | 1.0030 | 10.668 | 474.34 | 21,215 |
| −45° | −0.78540 | −0.77943 | 0.87347 | 0.05192 | 0.87347 | 1.0041 | 44.5951 | 1.0042 | 10.668 | 473.77 | 21,215 |
| −50° | −0.87267 | −0.86691 | 0.87347 | 0.05774 | 0.87347 | 1.0055 | 44.5951 | 1.0056 | 10.668 | 473.07 | 21,215 |
| −55° | −0.95993 | −0.95466 | 0.87347 | 0.06359 | 0.87347 | 1.0073 | 44.5951 | 1.0074 | 10.668 | 472.23 | 21,215 |
| −60° | −1.04720 | −1.04270 | 0.87347 | 0.06945 | 0.87347 | 1.0094 | 44.5951 | 1.0095 | 10.668 | 471.24 | 21,215 |
| −65° | −1.13446 | −1.13104 | 0.87347 | 0.07534 | 0.87347 | 1.0119 | 44.5951 | 1.0120 | 10.668 | 470.09 | 21,215 |
| −70° | −1.22173 | −1.21972 | 0.87347 | 0.08124 | 0.87347 | 1.0148 | 44.5951 | 1.0148 | 10.668 | 468.78 | 21,215 |
| −75° | −1.30900 | −1.30876 | 0.87347 | 0.08717 | 0.87347 | 1.0181 | 44.5951 | 1.0181 | 10.668 | 467.28 | 21,215 |
| −80° | −1.39626 | −1.39816 | 0.87347 | 0.09313 | 0.87347 | 1.0219 | 44.5951 | 1.0218 | 10.668 | 465.59 | 21,215 |
| −85° | −1.48353 | −1.48797 | 0.87347 | 0.09911 | 0.87347 | 1.0262 | 44.5951 | 1.0259 | 10.668 | 463.71 | 21,215 |
| −90° | −1.57080 | −1.57820 | 0.87347 | 0.10512 | 0.87347 | 1.0310 | 44.5951 | 1.0306 | 10.668 | 461.62 | 21,215 |
| −95° | −1.65806 | −1.66885 | 0.87347 | 0.11116 | 0.87347 | 1.0364 | 44.5951 | 1.0357 | 10.668 | 459.32 | 21,215 |
References
- Madihian, M.; Watanabe, K.; Yamamoto, T. A Frequency-Independent Phase Shifter. J. Phys. E Sci. Instrum. 1979, 12, 1031–1032. [Google Scholar] [CrossRef]
- Jones, B.K.; Sharma, B.K.; Bidle, D.H. A Frequency-Independent Phase Shifter. J. Phys. E Sci. Instrum. 1980, 13, 1346–1347. [Google Scholar] [CrossRef]
- Helfric, A. Phase Shifter Using Digital Techniques. Electr. Des. News 1987, 32, 289–290. [Google Scholar]
- Mittal, M.; Jamuar, S.S. Programmable Frequency-Independent Switched-Capacitor Phase Shifter of Unity Gain. Meas. Sci. Technol. 1991, 2, 475–477. [Google Scholar] [CrossRef]
- Cowan, B. A Versatile Phase Shifter for NMR Experiments and Other Applications. Meas. Sci. Technol. 1992, 3, 296–298. [Google Scholar] [CrossRef]
- Jung, D.H.; Ha, I.J. Low-Cost Sensorless Control of Brushless DC Motors Using a Frequency-Independent Phase Shifter. IEEE Trans. Power Electron. 2000, 15, 744–752. [Google Scholar] [CrossRef]
- Lobb, W.E. Acoustic Sound System for a Room. U.S. Patent 4,837,829, 6 June 1989. [Google Scholar]
- Zurcher, F. Sound Acquisition Method and System, and Sound Acquisition and Reproduction Apparatus. U.S. Patent 5,524,059, 4 June 1996. [Google Scholar]
- Elko, G.W.; Teutsch, H. Second-Order Adaptive Differential Microphone Array. J. Acoust. Soc. Am. 2004, 115, 14. [Google Scholar] [CrossRef]
- Oomen, P.; De Klerk, L. Environmental Sound Loudspeaker. Netherlands, Amsterdam: Patent WO/2023/287291, 19 January 2023. [Google Scholar]
- Sedra, A.S.; Smith, K.C. Microelectronic Circuits, 3rd ed.; Saunders College Publishing: Philadelphia, PA, USA, 1992. [Google Scholar]
- Cherepov, S.V. Bridge for AC Measurement of Magnetic Susceptibility. Instrum. Exp. Tech. 1986, 25, 1226–1227. [Google Scholar]
- Batrachenko, V.S.; Zarubina, T.V. Controllable Digital Phase Shifter. Instrum. Exp. Tech. 1978, 21, 1344–1345. [Google Scholar]
- Maslov, N.V.; Prikhnenko, R.E. Digital Phase Shifter for a Precision Calibrator of Phase Shifts. Instrum. Exp. Tech. 1978, 21, 1346–1347. [Google Scholar]
- Sankaran, P.; Jagadeesh Kumar, V.; Sudhakar Rao, K. Precision Frequency-Independent Variable-Phase Phase Shifter. Electron. Lett. 1995, 31, 154–155. [Google Scholar] [CrossRef]
- Abuelma’atti, M.T.; Baroudi, U. A Programmable Phase Shifter for Sinusoidal Signals. Act. Passiv. Electron. Compon. 1998, 21, 107–112. [Google Scholar] [CrossRef]
- Al-Absi, M.A. A Simple Low Cost Frequency-Independent Phase Shifter. Arab. J. Sci. Eng. 2009, 34, 145–152. [Google Scholar]
- Bitar, M.A.; Gallo, A.; Volpe, F.A. Multi-Pole Multi-Zero Frequency-Independent Phase-Shifter. Rev. Sci. Instrum. 2012, 83, 114703. [Google Scholar] [CrossRef]
- Csanád, M. Frequency Independent Phase Shifter. GitHub. 2023. Available online: https://github.com/theworksinstitute/fips (accessed on 25 May 2024).





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Csanád, M.; Val Baker, A.K.F.; Oomen, P. A Frequency-Independent Phase Shifter. Acoustics 2024, 6, 713-729. https://doi.org/10.3390/acoustics6030039
Csanád M, Val Baker AKF, Oomen P. A Frequency-Independent Phase Shifter. Acoustics. 2024; 6(3):713-729. https://doi.org/10.3390/acoustics6030039
Chicago/Turabian StyleCsanád, Máté, Amira K. F. Val Baker, and Paul Oomen. 2024. "A Frequency-Independent Phase Shifter" Acoustics 6, no. 3: 713-729. https://doi.org/10.3390/acoustics6030039
APA StyleCsanád, M., Val Baker, A. K. F., & Oomen, P. (2024). A Frequency-Independent Phase Shifter. Acoustics, 6(3), 713-729. https://doi.org/10.3390/acoustics6030039