
Digital Signal Processing (DSP)-Oriented Reduced-Complexity Algorithms for Calculating Matrix–Vector Products with Small-Order Toeplitz Matrices



Abstract
1. Introduction
2. Preliminary Remarks
3. Algorithms for Toeplitz Matrix–Vector Multiplication
3.1. Algorithm for
3.2. Algorithm for
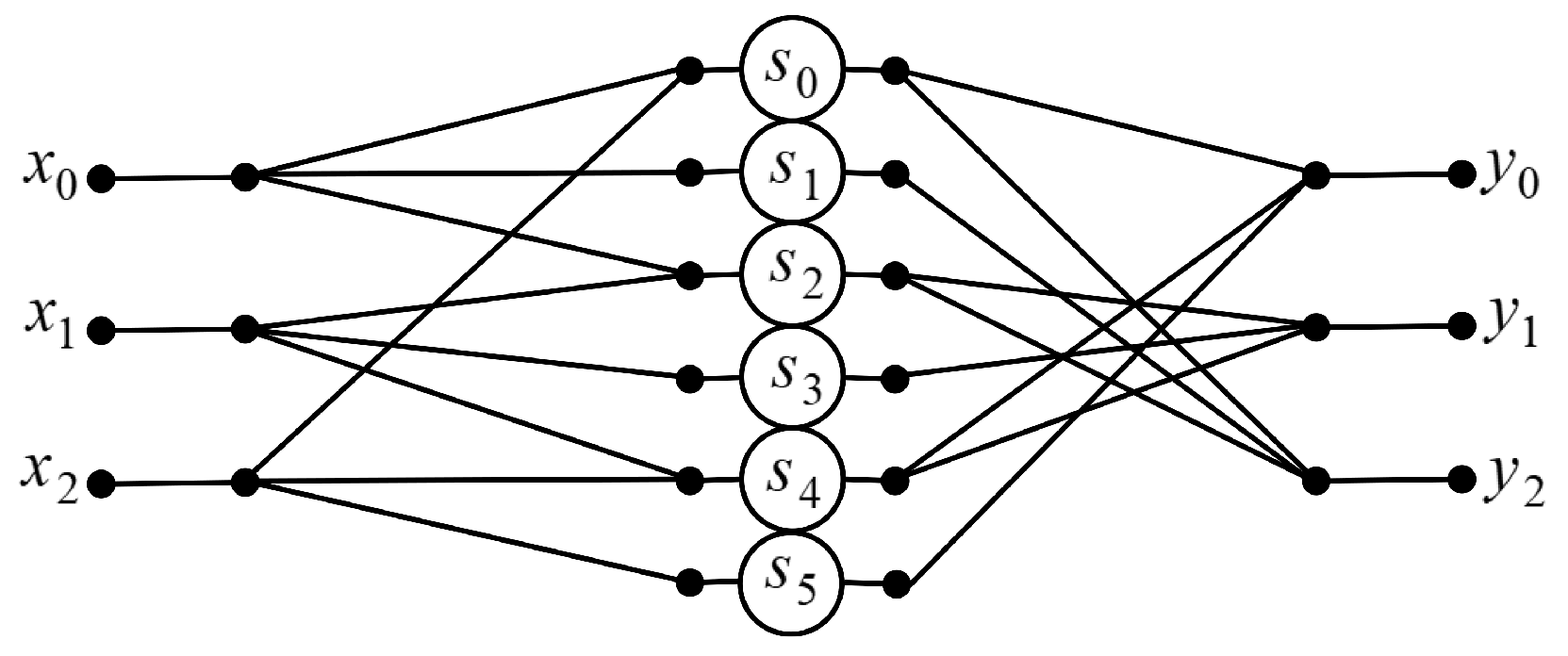
3.3. Algorithm for
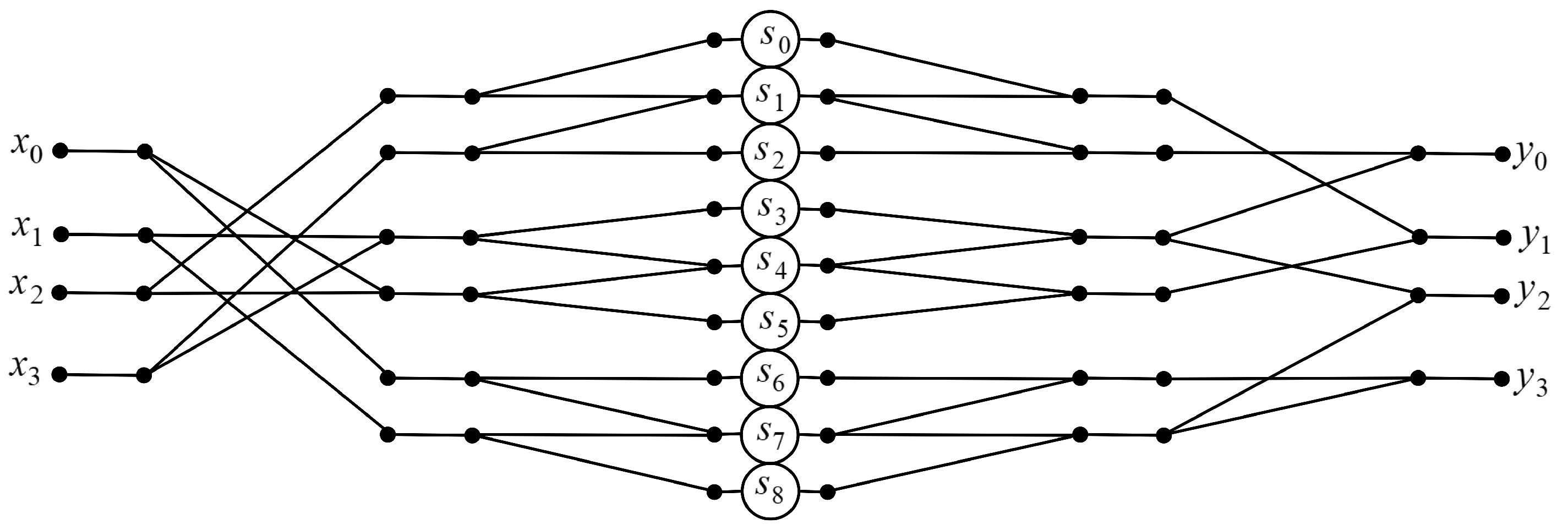
3.4. Algorithm for
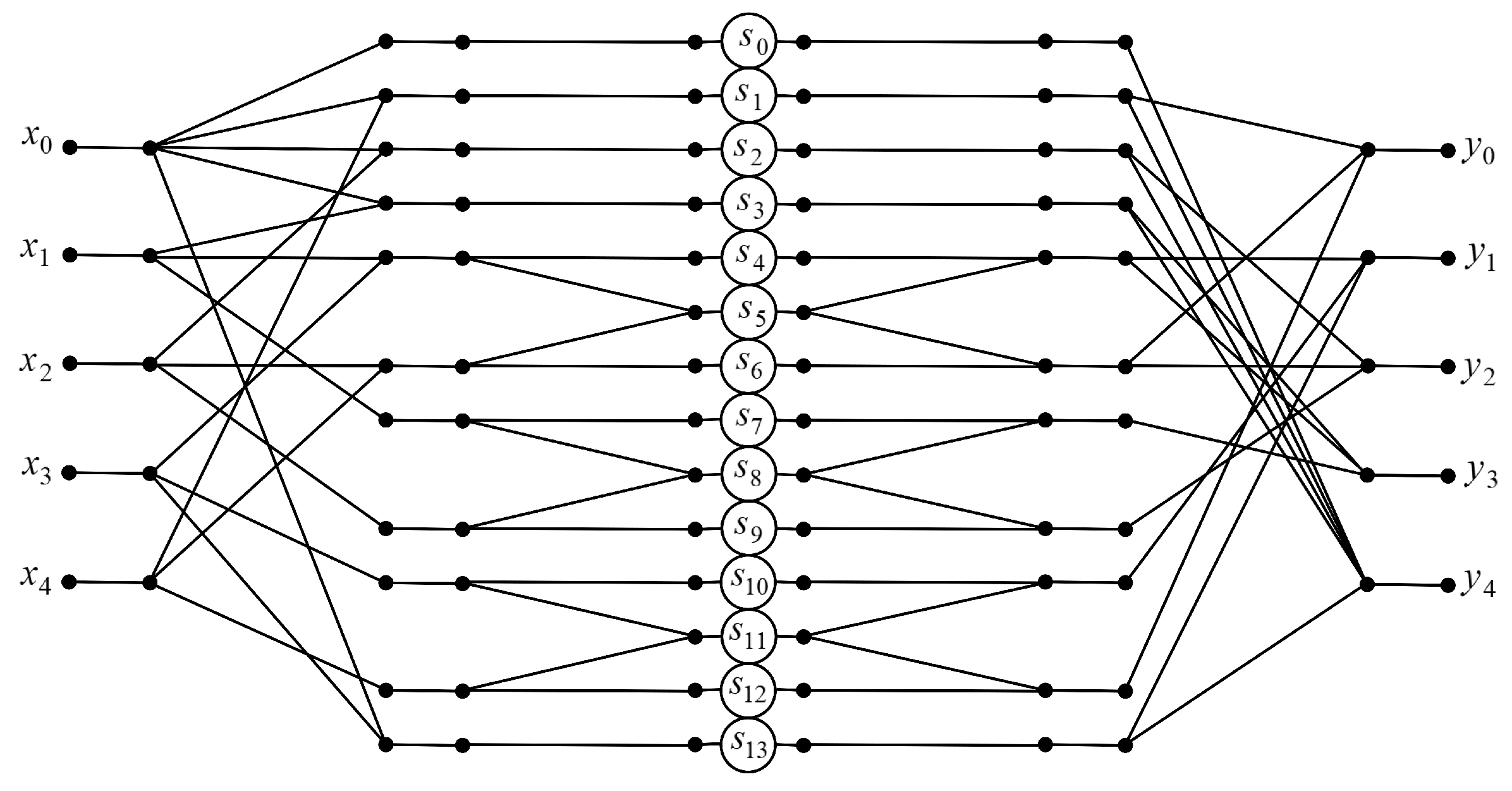
3.5. Algorithm for
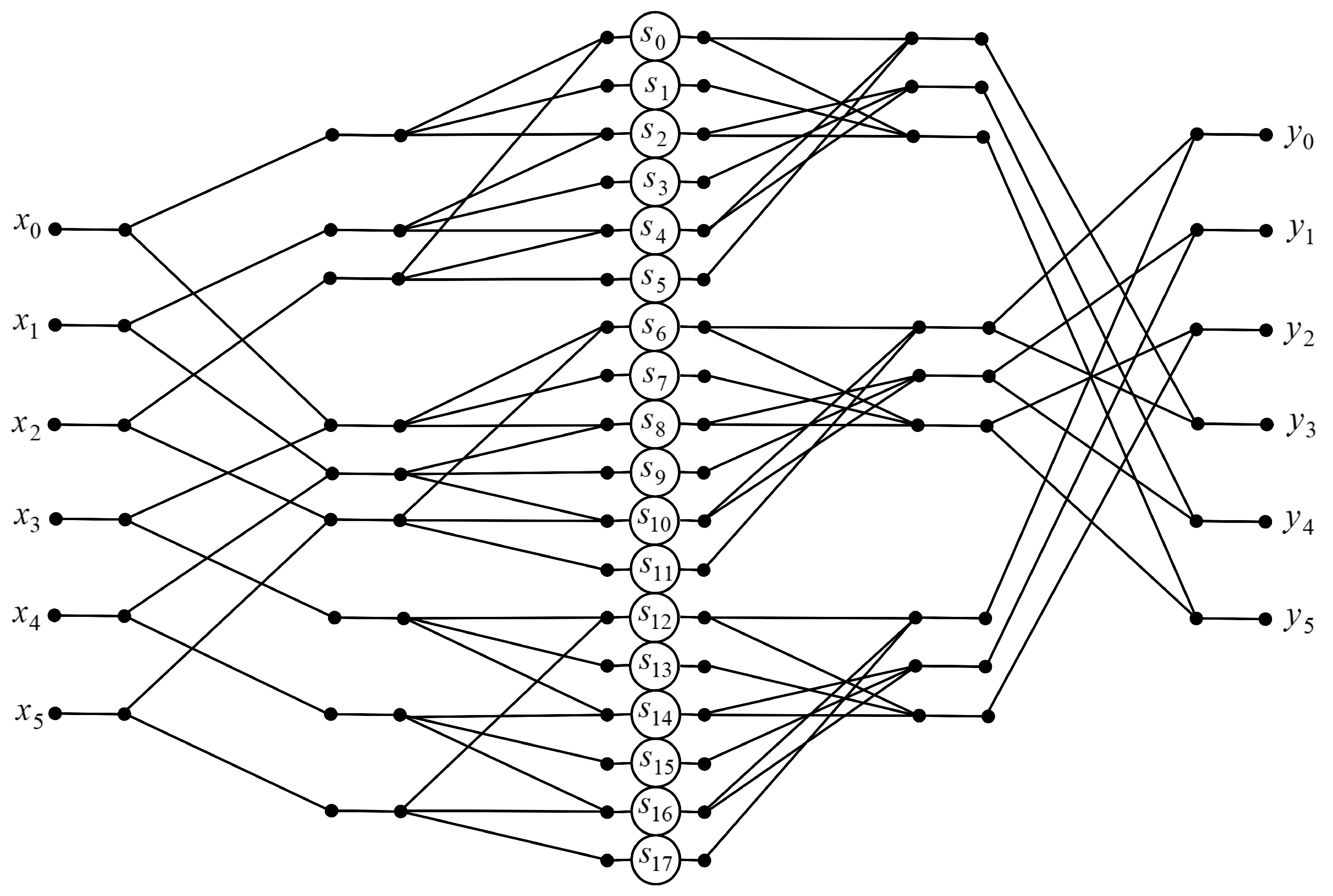
3.6. Algorithm for
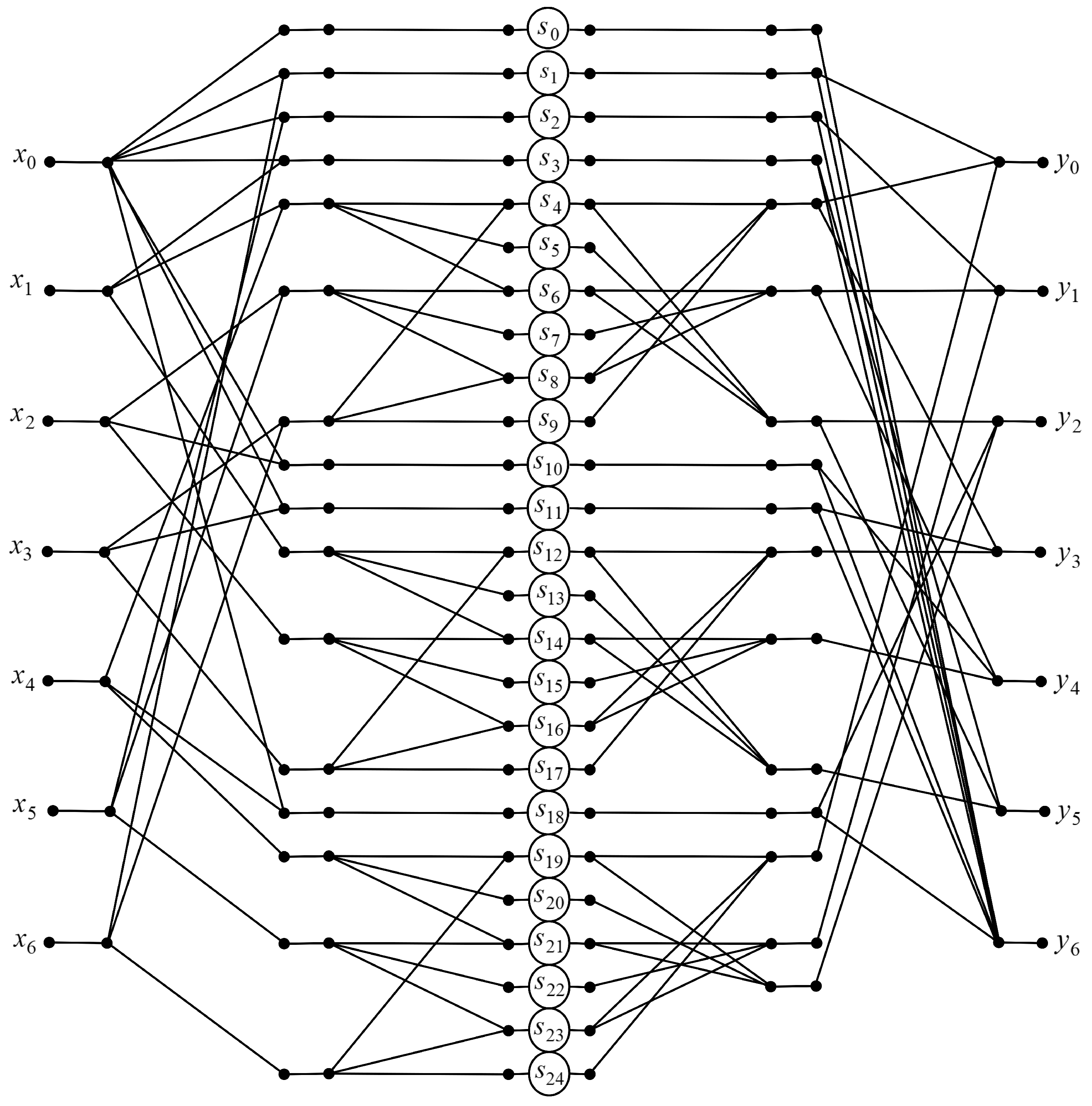
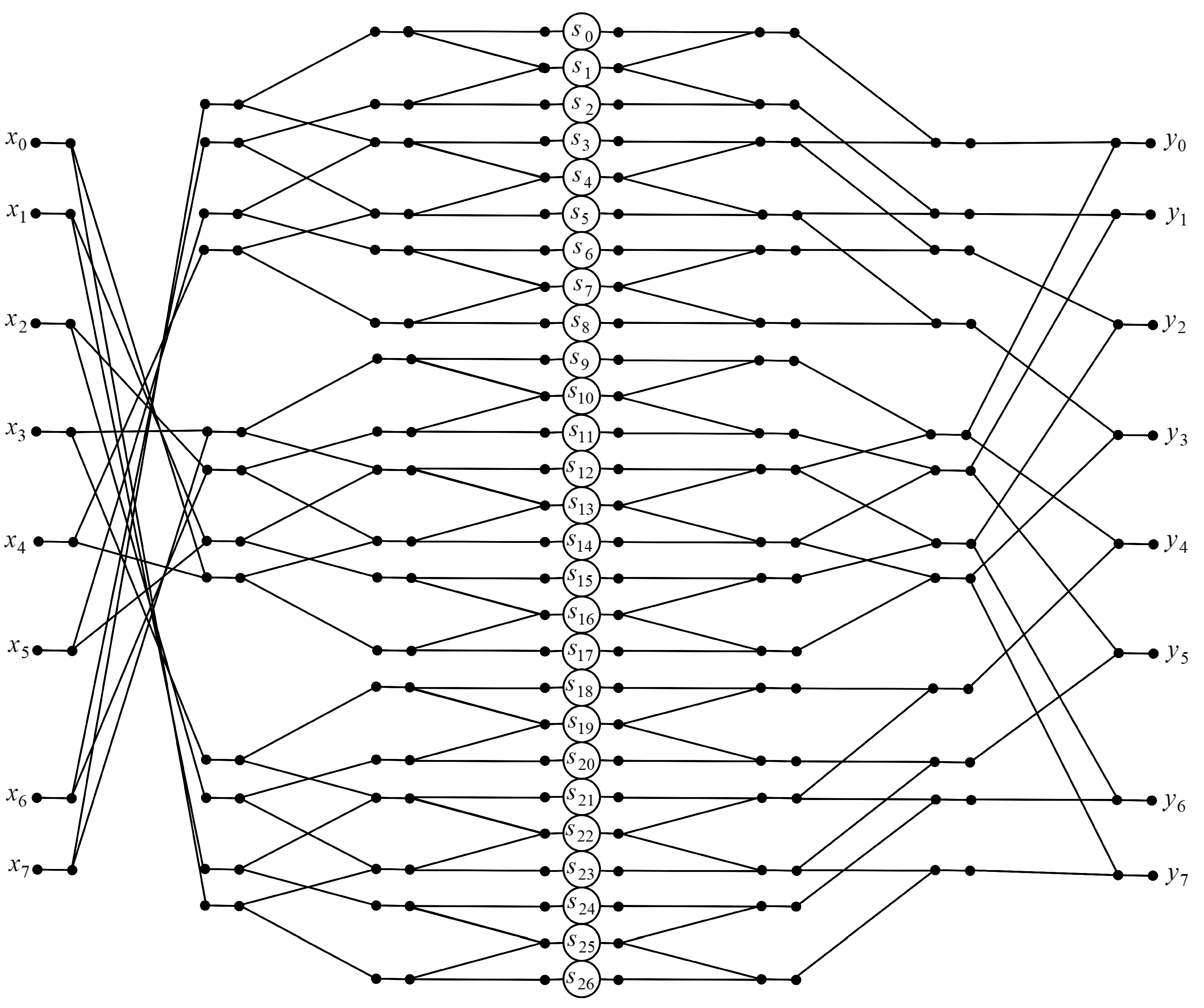
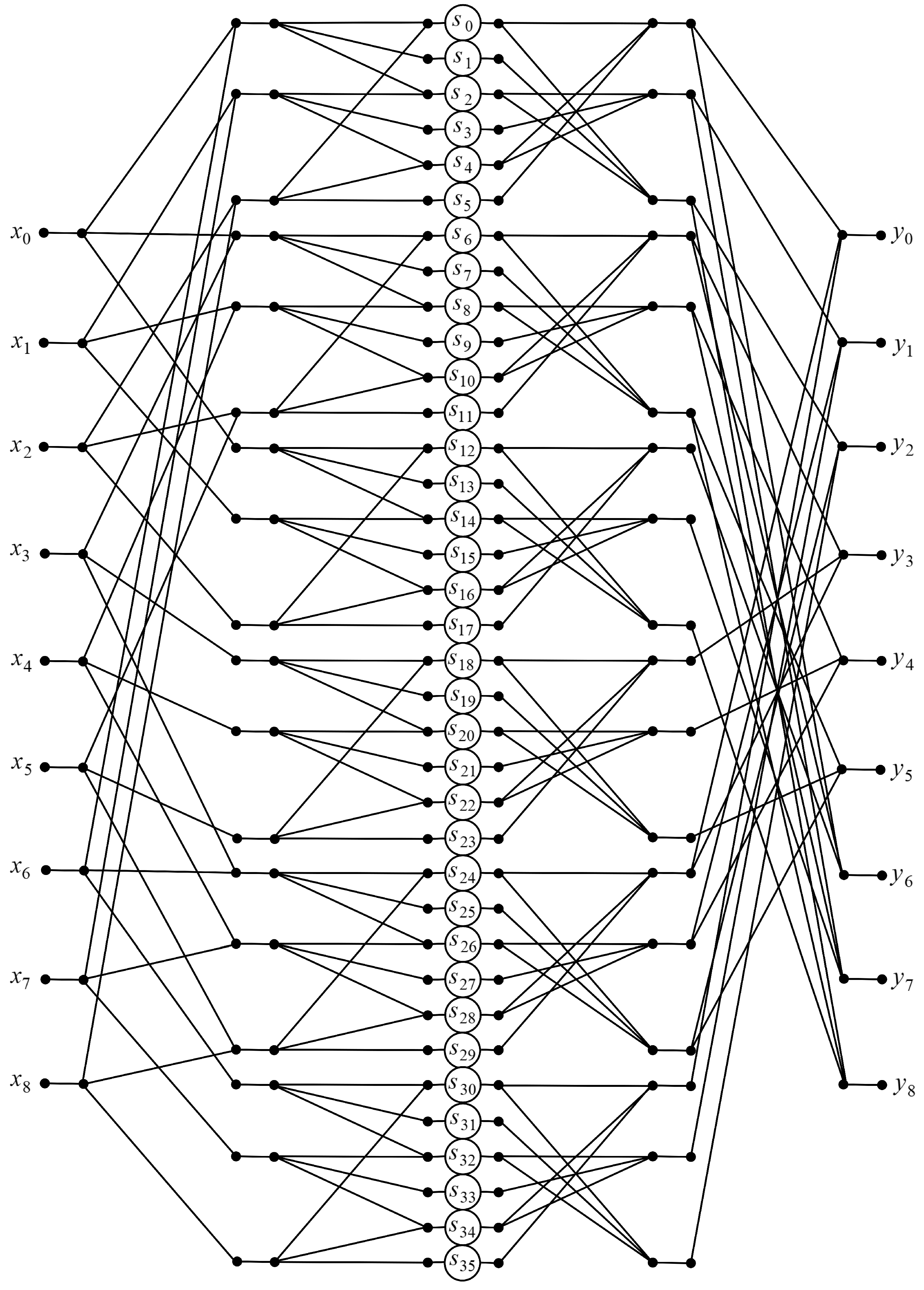
3.7. Algorithm for
4. Computational Cost Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| FFT | fast Fourier transform |
References
- Eidelman, Y.; Gohberg, I.; Haimovici, I. Separable type representations of matrices and fast algorithms. In Operator Theory: Advances and Applications; Birkhauser Springer: Basel, Switzerland, 2014; Volume 234. [Google Scholar]
- Neuts, M.F. Structured Stochastic Matrices of M/G/1 Type and Their Applications; CRC Press: New York, NY, USA, 2021. [Google Scholar]
- Olshevsky, V. Fast Algorithms for Structured Matrices: Theory and Applications: AMS-IMS-SIAM Joint Summer Research Conference on Fast Algorithms in Mathematics, Computer Science, and Engineering, 5–9 August 2001, Mount Holyoke College, South Hadley, Massachusetts; Contemporary Mathematics; American Mathematical Soc.: South Hadley, MA, USA, 2003; Volume 323. [Google Scholar]
- Pan, V. Structured Matrices and Polynomials: Unified Superfast Algorithms; Springer Science & Business Media: Boston, MA, USA, 2001. [Google Scholar]
- Yagle, A.E. 22 fast algorithms for structured matrices in signal processing. In Handbook of Statist; Elsevier: Amsterdam, The Netherlands, 1993; Volume 10, pp. 933–972. [Google Scholar] [CrossRef]
- Strang, G. The discrete cosine transform, block Toeplitz matrices, and wavelets. In Advances in Computational Mathematics; CRC Press: Boca Raton, FL, USA, 1999; Volume 202, pp. 517–536. [Google Scholar]
- Haupt, J.; Bajwa, W.U.; Raz, G.; Nowak, R. Toeplitz compressed sensing matrices with applicat ions to sparse channel estimation. IEEE Trans. Inf. Theory 2010, 56, 5862–5875. [Google Scholar] [CrossRef]
- Chen, Z.; Nagy, J.G.; Xi, Y.; Yu, B. Structured FISTA for image restoration. Numer. Linear Algebra Appl. 2020, 27, 2278. [Google Scholar] [CrossRef]
- Hu, Y.; Liu, X.; Jacob, M. A generalized structured low-rank matrix completion algorithm for mr image recovery. IEEE Trans. Med. Imaging 2018, 38, 1841–1851. [Google Scholar] [CrossRef]
- Zhang, X.; Zheng, Y.; Jiang, Z.; Byun, H. Numerical algorithms for corner-modified symmetric Toeplitz linear system with applications to image encryption and decryption. J. Appl. Math. Comput. 2023, 69, 1967–1987. [Google Scholar] [CrossRef]
- Moir, T. Toeplitz matrices for lti systems, an illustration of their application to wiener filters and estimators. Internat. J. Syst. Sci. 2018, 49, 800–817. [Google Scholar] [CrossRef]
- Zhang, Y.; Zhang, Y.; Li, W.; Huang, Y.; Yang, J. Super-resolution surface mapping for scanning radar: Inverse filtering based on the fast iterative adaptive approach. IEEE Trans. Geosci. Remote. Sens. 2017, 56, 127–144. [Google Scholar] [CrossRef]
- Chan, R.H.-F.; Jin, X.-Q. An Introduction to Iterative Toeplitz Solvers; SIAM: Philadelphia, PA, USA, 2007. [Google Scholar]
- Goian, A.; AlHajri, M.I.; Shubair, R.M.; Weruaga, L.; Kulaib, A.R.; AlMemari, R.; Darweesh, M. Fast detection of coherent signals using pre-conditioned root-music based on Toeplitz matrix reconstruction. In Proceedings of the WiMob 2015: IEEE 11th International Conference on Wireless and Mobile Computing, Networking and Communications, Abu Dhabi, United Arab Emirates, 19–21 October 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 168–174. [Google Scholar]
- Laskar, M.R.; Mondal, S.; Dutta, A.K. A low complexity quantum simulation framework for Toeplitz-structured matrix and its application in signal processing. IEEE Trans. Quantum Eng. 2023, 4, 1–23. [Google Scholar] [CrossRef]
- Qiao, H.; Pal, P. Generalized nested sampling for compressing low rank Toeplitz matrices. IEEE Signal Process. Lett. 2015, 22, 1844–1848. [Google Scholar] [CrossRef]
- Steimel, U. Fast computation of Toeplitz forms under narrowband conditions with applications to statistical signal processing. Signal Process. 1979, 1, 141–158. [Google Scholar] [CrossRef]
- Chen, B.; Liu, Y.; Zhang, C.; Wang, Z. Time series data for equipment reliability analysis with deep learning. IEEE Access 2020, 8, 105484–105493. [Google Scholar] [CrossRef]
- Albu, F.; Fagan, A. The Gauss-Seidel pseudo affine projection algorithm and its application for echo cancellation. In Proceedings of the Thrity-Seventh Asilomar Conference on Signals, Systems & Computers, Pacific Grove, CA, USA, 9–12 November 2003; IEEE: Piscataway, NJ, USA, 2003; pp. 1303–1306. [Google Scholar]
- Lu, L.; Yin, K.L.; de Lamare, R.C.; Zheng, Z.; Yu, Y.; Yang, X.; Chen, B. A survey on active noise control in the past decade—Part I: Linear systems. Signal Process. 2021, 183, 108039. [Google Scholar] [CrossRef]
- Wu, L.; Qiu, X.; Guo, Y. A generalized leaky FxLMS algorithm for tuning the waterbed effect of feedback active noise control systems. Mech. Syst. Signal Process. 2018, 106, 13–23. [Google Scholar] [CrossRef]
- Pan, J.S.; Lee, C.Y.; Sghaier, A.; Zeghid, M.; Xie, J. Novel systolization of subquadratic space complexity multipliers based on Toeplitz matrix–vector product approach. IEEE Trans. Very Large Scale Integr. (Vlsi) Syst. 2019, 27, 1614–1622. [Google Scholar] [CrossRef]
- Taşkin, H.K.; Cenk, M. Speeding up curve25519 using Toeplitz matrix-vector multiplication. In Proceedings of the Fifth Workshop on Cryptography and Security in Computing Systems, HiPEAC, Manchester, UK, 22–25 January 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Ye, G. A chaotic image cryptosystem based on Toeplitz and hankel matrices. Imaging Sci. J. 2009, 57, 266–273. [Google Scholar] [CrossRef]
- Araujo, A. Building compact and robust deep neural networks with Toeplitz matrices. arXiv 2021, arXiv:2109.00959. [Google Scholar] [CrossRef]
- Araujo, A.; Negrevergne, B.; Chevaleyre, Y.; Atif, J. On lipschitz regularization of convolutional layers using Toeplitz matrix theory. In Proceedings of the AAAI Conference on Artificial Intelligence, Virtual, 2–9 February 2021; Volume 35, pp. 6661–6669. [Google Scholar]
- Liao, S.; Samiee, A.; Deng, C.; Bai, Y.; Yuan, B. Compressing deep neural networks using Toeplitz matrix: Algorithm design and fpga implementation. In Proceedings of the ICASSP 2019: IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Brighton, UK, 12–17 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1443–1447. [Google Scholar]
- Liu, Y.; Jiao, S.; Lim, L.-H. Lu decomposition and Toeplitz decomposition of a neural network. Appl. Comput. Harmon. Anal. 2024, 68, 101601. [Google Scholar] [CrossRef]
- Lu, Z.; Sindhwani, V.; Sainath, T.N. Learning compact recurrent neural networks. In Proceedings of the ICASSP 2016 IEEE International Conference on Acoustics, Speech and Signal Processing, Shanghai, China, 20–25 March 2016; IEEE: Piscataway, NJ, USA, 2016. [Google Scholar]
- Wang, J.; Chen, Y.; Chakraborty, R.; Yu, S.X. Orthogonal convolutional neural networks. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Virtual, 14–19 June 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 11505–11515. [Google Scholar]
- Wu, X.; Yang, X.; Jia, X.; Tian, F. A gridless DOA estimation method based on convolutional neural network with Toeplitz prior. IEEE Signal Process. Lett. 2022, 29, 1247–1251. [Google Scholar] [CrossRef]
- Elvander, F.; Jakobsson, A.; Karlsson, J. Interpolation and extrapolation of Toeplitz matrices via optimal mass transport. IEEE Trans. Signal Process. 2018, 66, 5285–5298. [Google Scholar] [CrossRef]
- Esfandiari, M.; Vorobyov, S.A.; Heath, R.W. Sparsity enforcing with Toeplitz matrix reconstruction method for mmwave ul channel estimation with one-bit adcs. In Proceedings of the 2022 IEEE 12th Sensor Array and Multichannel Signal Processing Workshop (SAM), Trondheim, Norway, 20–23 June 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 141–145. [Google Scholar]
- Liu, Z.; Wu, N.; Qin, X.; Zhang, Y. Trigonometric transform splitting methods for real symmetric Toeplitz systems. Comput. Math. Appl. 2018, 75, 2782–2794. [Google Scholar] [CrossRef]
- Presti, L.L.; La Cascia, M. Boosting hankel matrices for face emotion recognition and pain detection. Comput. Vis. Image Underst. 2017, 156, 19–33. [Google Scholar] [CrossRef]
- Qi, B.; Liu, X.; Dou, D.; Zhang, Y.; Hu, R. An enhanced doa estimation method for coherent sources via Toeplitz matrix reconstruction and Khatri–Rao subspace. Electronics 2023, 20, 4268. [Google Scholar] [CrossRef]
- Saeed, K. Object classification and recognition using Toeplitz matrices. In Artificial Intelligence and Security in Computing Systems; Springer: Boston, MA, USA, 2003; pp. 163–172. [Google Scholar]
- Xu, Z.; Saleh, J.H. Machine learning for reliability engineering and safety applications: Review of current status and future opportunities. Reliab. Eng. Syst. Saf. 2021, 211, 107530. [Google Scholar] [CrossRef]
- Jiafeng, X.; Chiou-Yng, L.; Pramod Kumar, M. Low-complexity systolic multiplier for GF (2 m) using Toeplitz matrix-vector product method. In Proceedings of the 2019 IEEE International Symposium on Circuits and Systems (ISCAS), Sapporo, Japan, 26–29 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Chan, R.H.; Ng, M.K. Conjugate gradient methods for Toeplitz systems. SIAM Rev. 1996, 38, 427–482. [Google Scholar] [CrossRef]
- Heinig, G.; Rost, K. Fast algorithms for Toeplitz and hankel matrices. Linear Algebra Appl. 2011, 435, 1–59. [Google Scholar] [CrossRef]
- Hsue, J.-J.; Yagle, A.E. Fast algorithms for solving Toeplitz systems of equations using number-theoretic transforms. Signal Process. 1995, 44, 89–101. [Google Scholar] [CrossRef]
- Chen, W.W.; Hurvich, C.M.; Lu, Y. On the correlation matrix of the discrete fourier transform and the fast solution of large Toeplitz systems for long-memory time series. J. Amer. Statist. Assoc. 2006, 101, 812–822. [Google Scholar] [CrossRef]
- Dongarra, J.; Koev, P.; Li, X. Matrix-vector and matrix-matrix multiplications. In Templates for the Solution of Algebraic Eigenvalue Problems: A Practical Guide; SIAM: Philadelphia, PA, USA, 2000; Volume 11, pp. 320–326. [Google Scholar]
- Cariow, A.; Gliszczyński, M. Fast algorithms to compute matrix-vector products for Toeplitz and hankel matrices. Electr. Rev. 2012, 88, 166–171. [Google Scholar]
- Beliakov, G. On fast matrix-vector multiplication with a hankel matrix in multiprecision arithmetics. arXiv 2014, arXiv:1402.5287. [Google Scholar] [CrossRef]
- Karatsuba, A.A.; Ofman, Y.P. Multiplication of many-digital numbers by automatic computers. Dokl. Akad. Nauk. Russ. Acad. Sci. 1962, 145, 293–294. [Google Scholar]
- Cariow, A. Strategies for the synthesis of fast algorithms for the computation of the matrix-vector products. J. Signal Process. Theory Appl. 2014, 3, 1–19. [Google Scholar] [CrossRef]
- Van Loan, C.F. The ubiquitous kronecker product. J. Comput. Appl. Math. 2000, 123, 85–100. [Google Scholar] [CrossRef]
- Ayres, F. Theory and Problems of Matrices; McGraw-Hill: New York, NY, USA, 1962. [Google Scholar]

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Order of | Multiplications | Additions | Arithmetic Operations | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Matrix | Direct | Prop. | Reduct. | Direct | Prop. | Incr. | Direct | Prop. | Incr. |
| 3 | 9 | 6 | 3 | 6 | 15 | 9 | 15 | 21 | 6 |
| 4 | 16 | 9 | 7 | 12 | 26 | 14 | 28 | 35 | 7 |
| 5 | 25 | 14 | 11 | 20 | 45 | 25 | 45 | 59 | 14 |
| 6 | 36 | 18 | 18 | 30 | 60 | 30 | 66 | 78 | 12 |
| 7 | 49 | 25 | 24 | 42 | 87 | 45 | 91 | 112 | 21 |
| 8 | 64 | 27 | 37 | 56 | 114 | 58 | 120 | 141 | 21 |
| 9 | 81 | 36 | 45 | 72 | 144 | 72 | 153 | 180 | 27 |
| Order of | Multiplications | Additions | Arithmetic Operations | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Matrix | Direct | Prop. | Reduct. | Direct | Prop. | Incr. | Direct | Prop. | Reduct. |
| 3 | 9 | 6 | 3 | 6 | 9 | 3 | 15 | 15 | 0 |
| 4 | 16 | 9 | 7 | 12 | 15 | 3 | 28 | 24 | 4 |
| 5 | 25 | 14 | 11 | 20 | 27 | 7 | 45 | 41 | 4 |
| 6 | 36 | 18 | 18 | 30 | 33 | 3 | 66 | 51 | 15 |
| 7 | 49 | 25 | 24 | 42 | 51 | 9 | 91 | 76 | 15 |
| 8 | 64 | 27 | 37 | 56 | 57 | 1 | 120 | 84 | 36 |
| 9 | 81 | 36 | 45 | 72 | 81 | 9 | 153 | 117 | 36 |
| Order of | Slices | ||||
|---|---|---|---|---|---|
| Matrix | Devices | MULT 18 × 18 | Direct | Proposed | Reduction |
| 3 | xc3s50-4pq208 | 4 | 136 | 76 | 44.1% |
| 4 | xc3s50-4pq208 | 4 | 292 | 210 | 28.1% |
| 5 | xc3s200-4pq208 | 12 | 384 | 249 | 35.2% |
| 6 | xc3s400-4fg456 | 16 | 542 | 332 | 38.7% |
| 7 | xc3s400-4fg456 | 16 | 934 | 634 | 32.1% |
| 8 | xc3s1000-4fg456 | 24 | 1011 | 553 | 45.3% |
| 9 | xc3s1000-4fg676 | 24 | 1519 | 890 | 41.4% |
| Order of | 4 Input LUTs | |||
|---|---|---|---|---|
| Matrix | Devices | Direct | Proposed | Reduction |
| 3 | xc3s50-4pq208 | 256 | 140 | 45.3% |
| 4 | xc3s50-4pq208 | 549 | 382 | 30.4% |
| 5 | xc3s200-4pq208 | 729 | 467 | 35.9% |
| 6 | xc3s400-4fg456 | 1031 | 612 | 40.6% |
| 7 | xc3s400-4fg456 | 1757 | 1172 | 33.3% |
| 8 | xc3s1000-4fg456 | 1871 | 1042 | 44.3% |
| 9 | xc3s1000-4fg676 | 2882 | 1656 | 42.5% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Papliński, J.P.; Cariow, A.; Strzelec, P.; Makowska, M. Digital Signal Processing (DSP)-Oriented Reduced-Complexity Algorithms for Calculating Matrix–Vector Products with Small-Order Toeplitz Matrices. Signals 2024, 5, 417-437. https://doi.org/10.3390/signals5030021
Papliński JP, Cariow A, Strzelec P, Makowska M. Digital Signal Processing (DSP)-Oriented Reduced-Complexity Algorithms for Calculating Matrix–Vector Products with Small-Order Toeplitz Matrices. Signals. 2024; 5(3):417-437. https://doi.org/10.3390/signals5030021
Chicago/Turabian StylePapliński, Janusz P., Aleksandr Cariow, Paweł Strzelec, and Marta Makowska. 2024. "Digital Signal Processing (DSP)-Oriented Reduced-Complexity Algorithms for Calculating Matrix–Vector Products with Small-Order Toeplitz Matrices" Signals 5, no. 3: 417-437. https://doi.org/10.3390/signals5030021
APA StylePapliński, J. P., Cariow, A., Strzelec, P., & Makowska, M. (2024). Digital Signal Processing (DSP)-Oriented Reduced-Complexity Algorithms for Calculating Matrix–Vector Products with Small-Order Toeplitz Matrices. Signals, 5(3), 417-437. https://doi.org/10.3390/signals5030021