Development of User-Integrated Semi-Autonomous Lawn Mowing Systems: A Systems Engineering Perspective and Proposed Architecture


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction and Background
1.1. Motivation and Problem Overview
1.2. Previous Work: Mowing Systems
1.3. Previous Work: Navigation, Data Processing, and Path Planning
1.4. Main Areas of Applicability
- It is not always possible to rely on GPS coverage with either a field robot or mowing system, making navigation systems such as dead reckoning, beacon finding, and drive-by-sight necessary in some cases. In a more urban outdoor environment, GPS coverage is likely much more reliable (due to built-in redundancies in highly populated areas [33]) and the layout of the space is more logical and easy for a map to be made of it for the robot. This is of course not always the case, but it can be generally assumed that city streets are more clearly laid out and planned than dirt paths in more rural areas and large areas of grass (in yards and similar).
- For both agricultural and semi-autonomous mowing systems, the lack of buildings locally may make it more difficult to map the space. Buildings can be recognized by the on-board instruments and can be used as markers and space limits. For field robotics and mowing systems, there may be a single building (such as a house or barn) or nothing (such as on a golf course or field). This lack of building decreases the available easily-spotted landmarks and increases the possible distance between the system and operators. This can be mitigated somewhat by using UAVs as markers (or mappers), by using more long-range communication strategies, and similar strategies that would require more active setup from the user.
- In urban environments, the encountered obstacles are both more likely to be static and standardized (cars, manhole covers, poles, traffic cones) or very unpredictable (cars, animals not afraid of machinery); both mowing system and other agricultural robotic systems are more likely to encounter generally unpredictable obstacles (e.g., animals and debris from storm damage) and obstacles which may block control and GPS signals in some areas (e.g., large trees and ravines). It is assumed in both cases that humans would not be effective obstacles, as they would be intelligent enough to detect and avoid the robot.
- Finally, a semi-autonomous mowing system will need to be able to monitor and navigate among plants (the cut grass, as well as any ornamental plants and trees). The size, density, and appearance of the plants may be somewhat random, as it is not possible to make all of them for the mowing system. Similarly, the uncut height of the grass will be a random variable distribution, not a single number, and need to be tracked and dealt with by the mower during operation. A major decision that will need to be made by the mowing system during operation is whether an encountered plant (identified as being different than the grass) is to be cut (such as a weed) or treated as an obstacle (e.g., it is too thick to be cut by the mower or is a plant that should be preserved).
1.5. Purpose and Study Structure
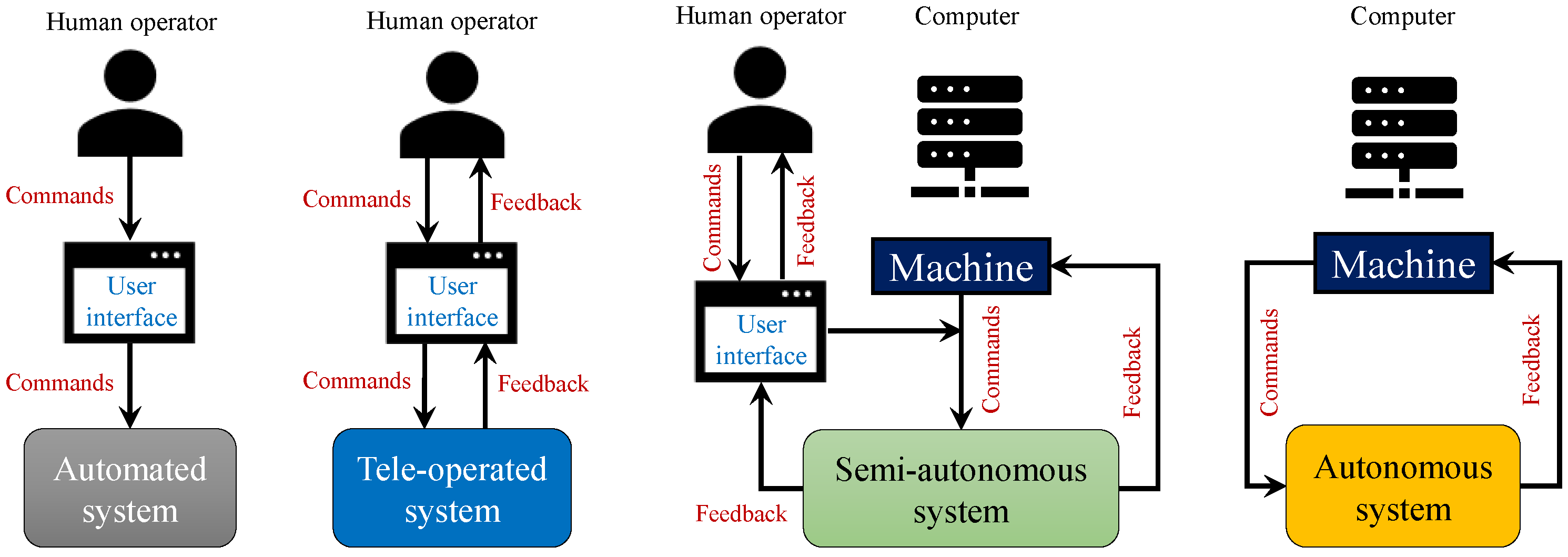
2. Systems Engineering Perspective
2.1. Motivation for a Systems Engineering Perspective
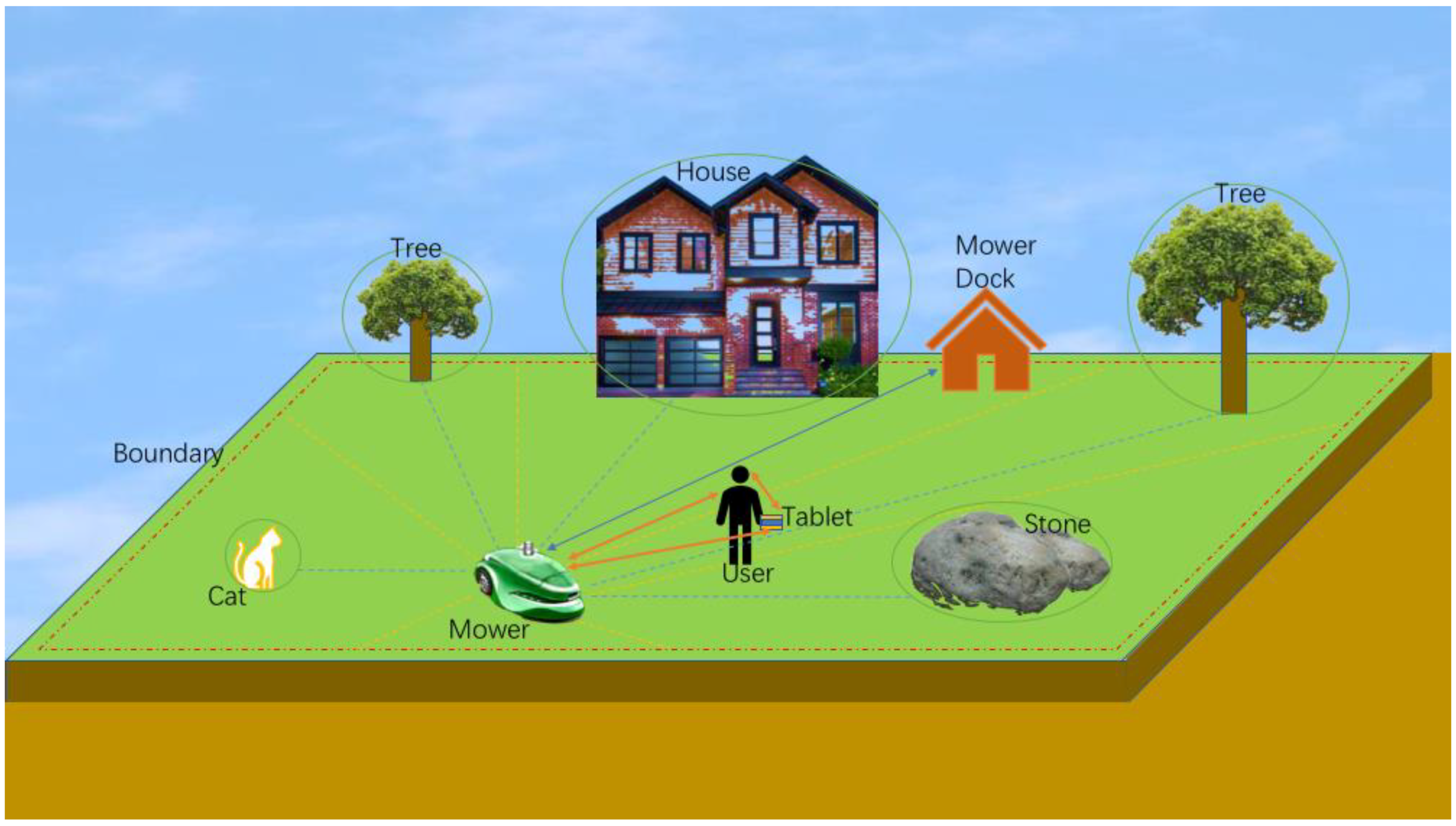
2.2. Concept of Operations (CONOPS)
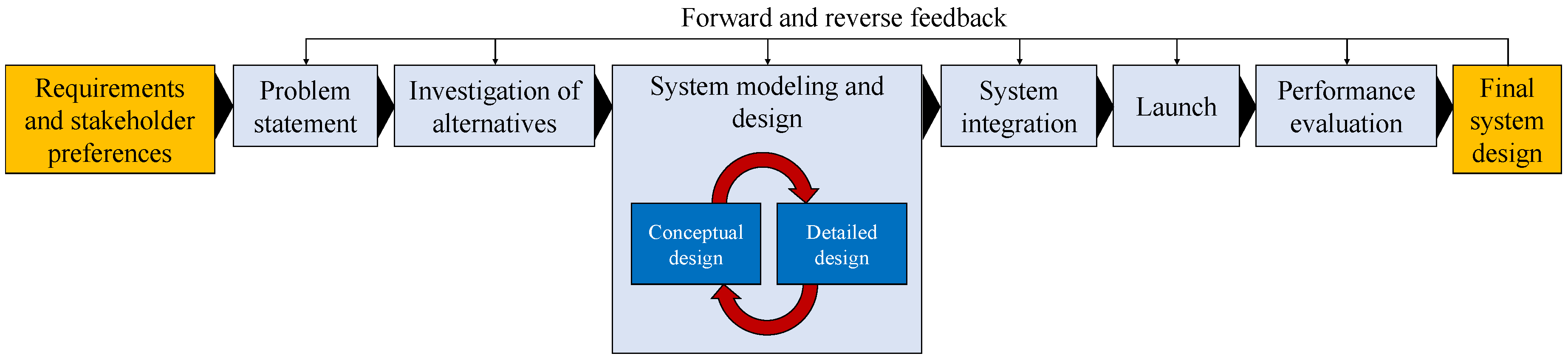
2.3. System View of User-Integrated, Semi-Autonomous Mowers
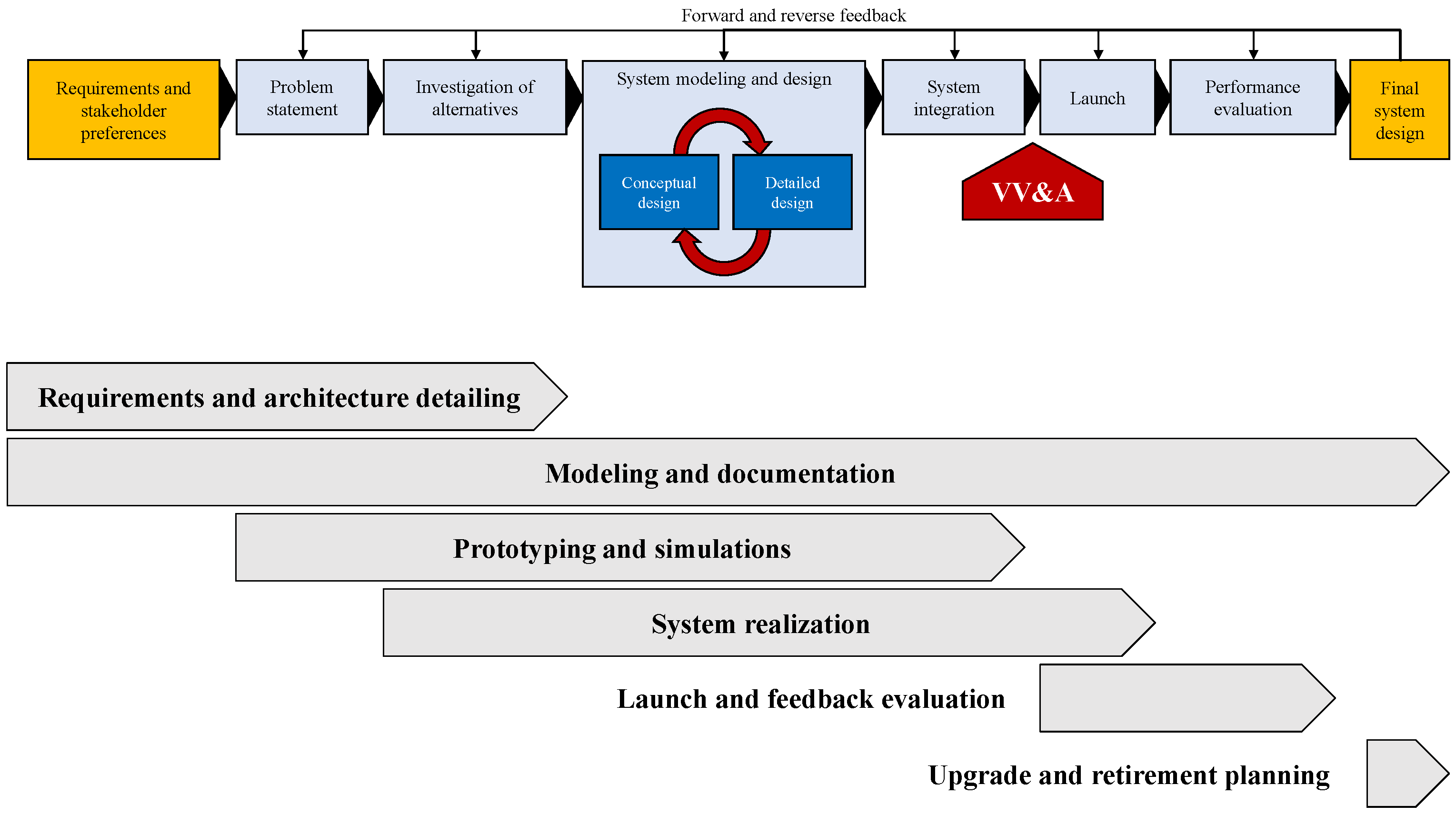
- The lifecycle tasks: These include moving the system design along from step to step (Figure 3) to ensure an completed and useful system
- The design and integration tasks within each of the steps
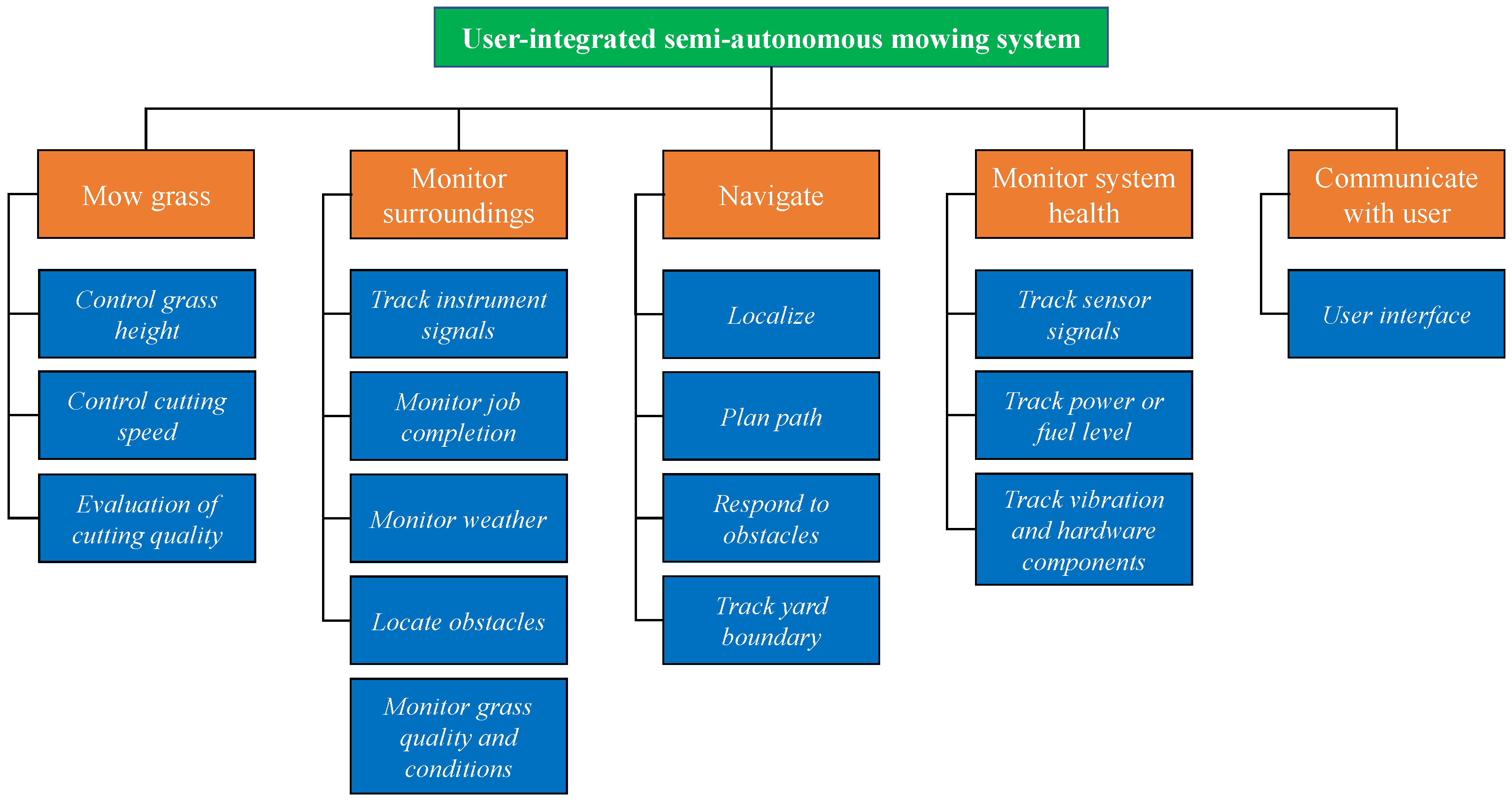
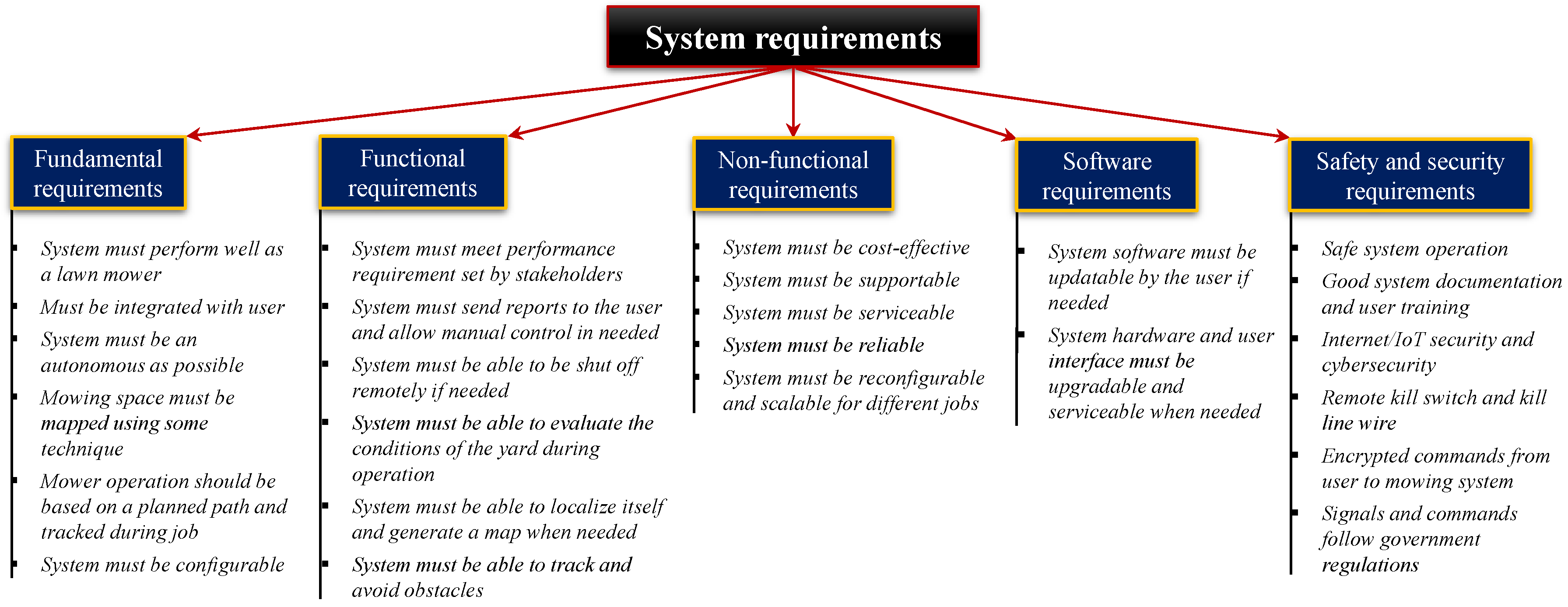
3. Basic, High-Level Requirements Development
- Fundamental requirements: These are the most important high-level requirements, such as the expected basic performance and configuration of the system [37,38,39,40]. In the case of a user-integrated semi-autonomous mowing system, these requirements would be things such as requiring a basic user interface, that the system should have a significant degree of autonomy, that the system would function using a planned path and avoid obstacles, and that the space to be mowed must be mapped somehow and have a boundary identifiable by the mowing system.
- Functional requirements: Since the fundamental requirements (i.e., “the system must do X”), the functional requirements are those related to performance and function of the system [39,40,41]. These may include things such as meeting minimal performance and efficiency requirements, being able to be remotely shut off in an emergency, being able to localize itself once the job is started, and other functional requirements.
- Non-functional requirements: These would contain the bulk of the general requirements and deal with things such as reliability, serviceability, supportability, and cost effectiveness [37,42,43,44]. This list of requirements could be the most broad, as these may relate to things external to the system, such as local regulations and the desires of the user not related to mowing quality (e.g., color, noise level, IOS versus android user platform, etc.).
- Software requirements: These requirements [45,46,47] would be separate from the other requirements, as the software used will likely be developed separate from the rest of the system and may be used in a wide variety of systems, similar to 3-D printer software packages such as Cura® and Repetier-Host®. The software development may also have a large influence on the development of the rest of the system, as it may impose operational constraints on the rest of the system. However, whether the software is open-source or proprietary, it should allow upgrades and bug and security fixes either by the user or pushed by the manufacturer. When possible, existing software libraries (such a Robotic Operating Systems (ROS) [48,49,50,51]) may be used to decrease the development risk [52,53]. However, in a commercial environment, the manufacturer may choose to use proprietary software for a variety of reasons; this is discussed in more depth in Section 5 on practical system implementation.
- Safety and security requirements: It is vitally important for the system to be safe to use for the operator, any by-standers, and any animals or property that could be encountered by the mower. In addition, the system will need to connected to the internet (or at least a local network) and will have high-value hardware components, it is vital that robust physical and cyber security is implemented [38,54,55,56].
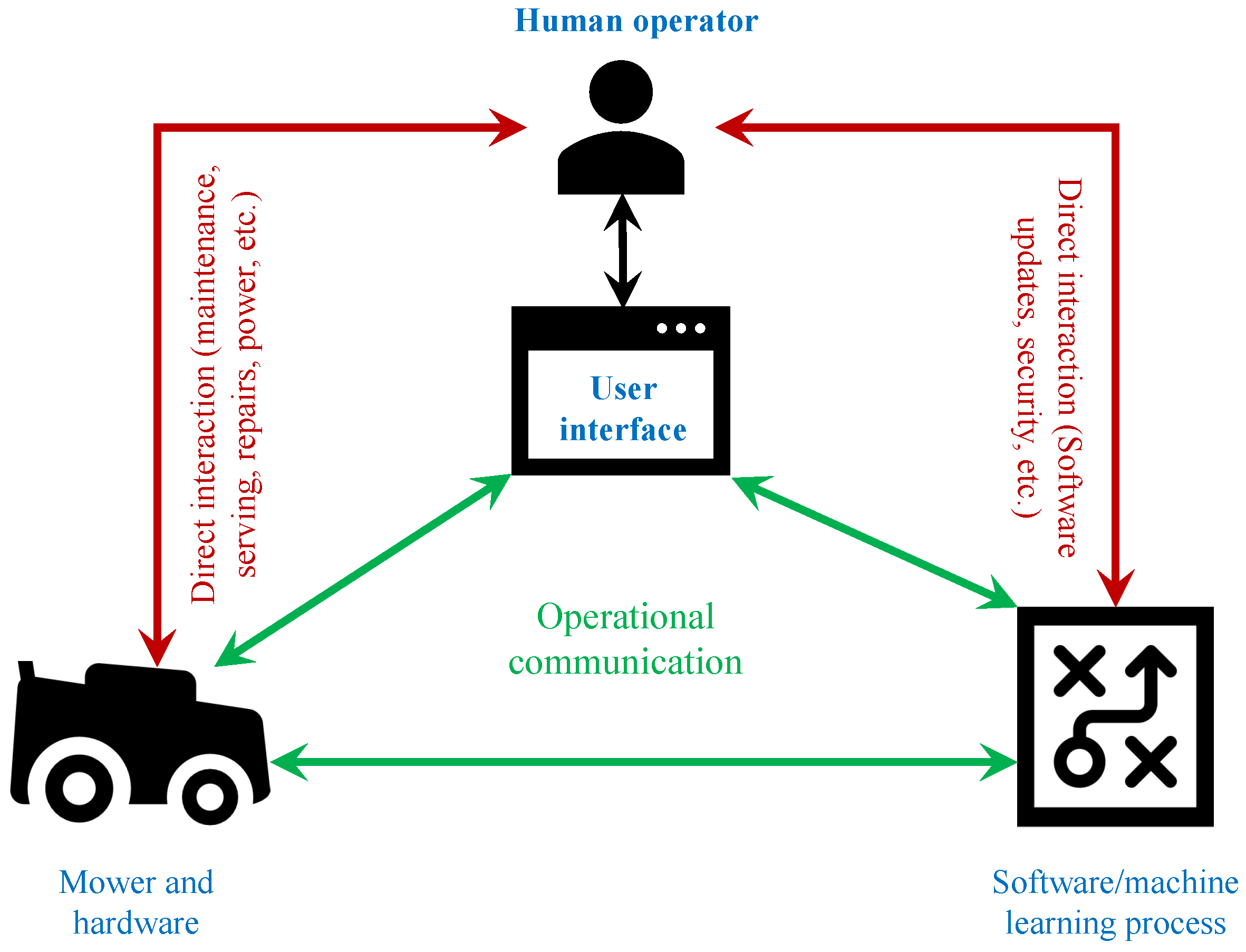
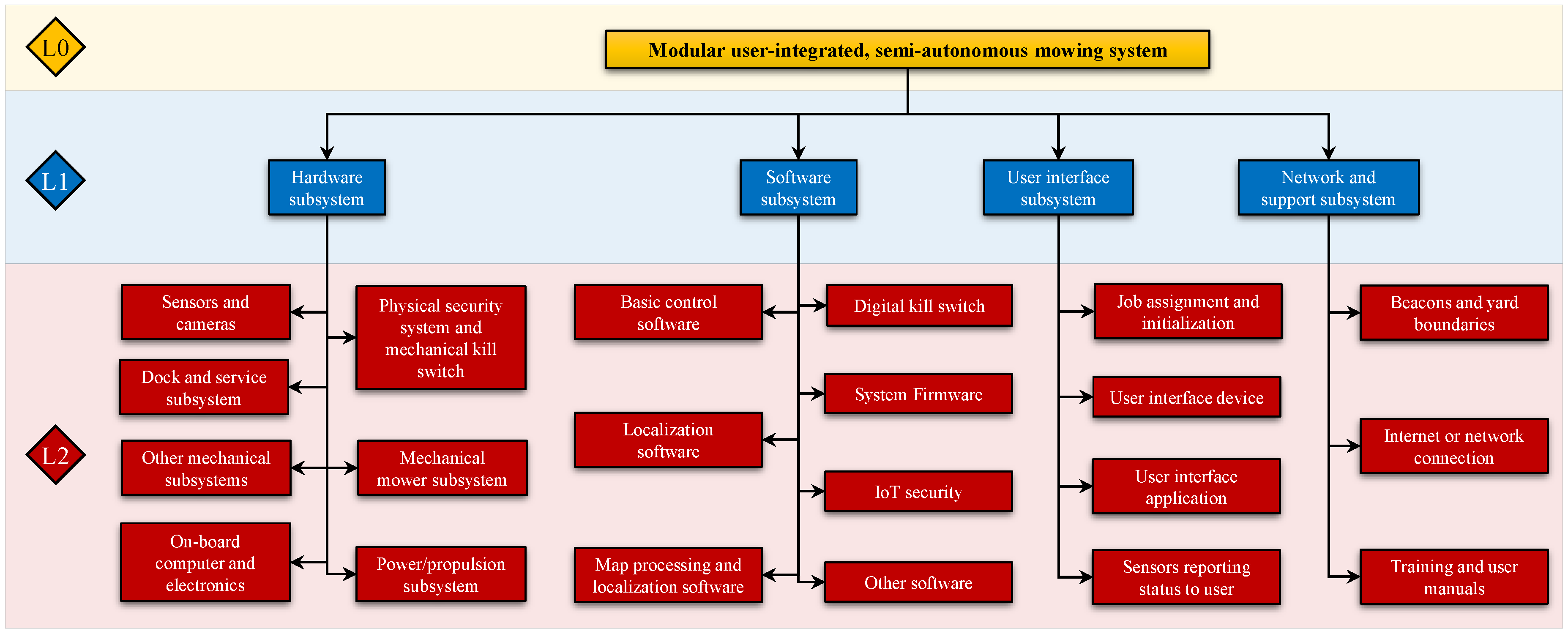
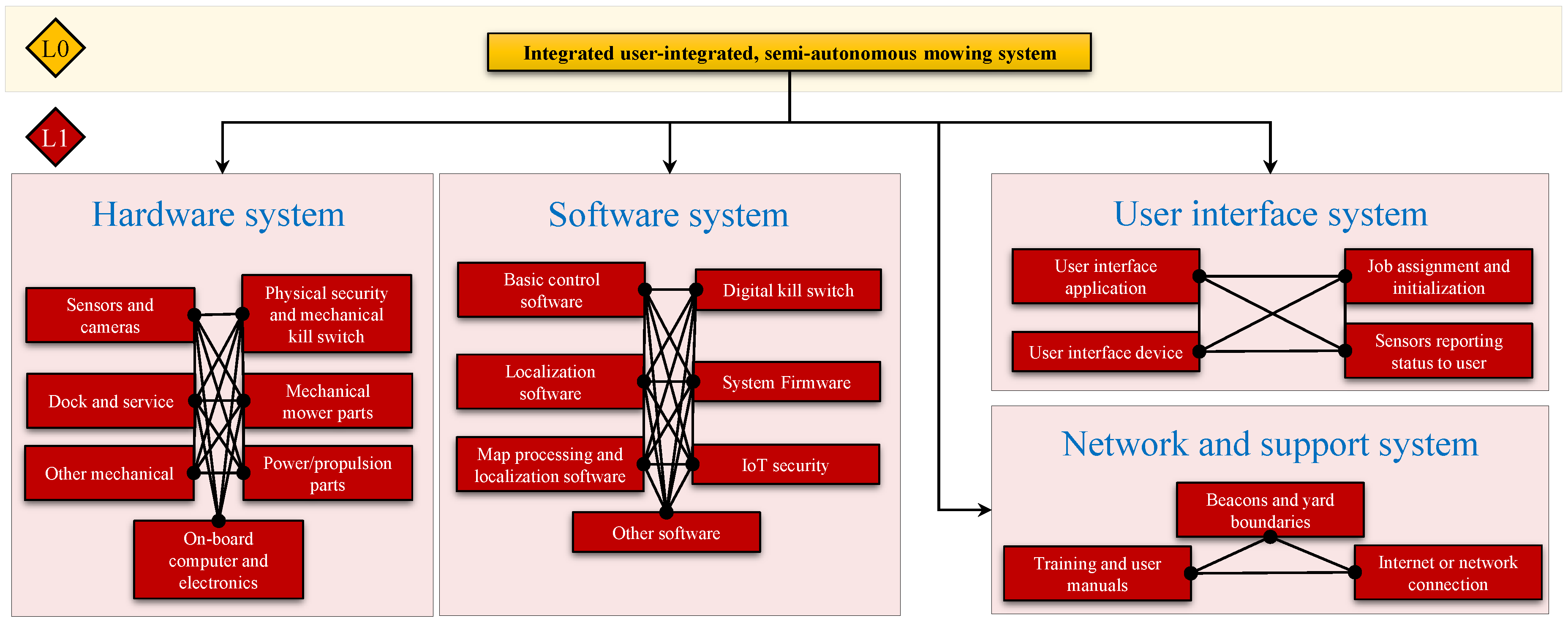
4. Proposed System Architecture
- The user will interact with the working system through the user interface
- The system will operate with some degree of autonomy with the user providing some of the monitoring, direction, and decision making
- The hardware and software elements must interact through the sensors, the on-board computer, and the localization system
- There must be some boundary elements for the yard for the localization engine and sensors to interact with
- There must be some kind of secondary vision system in order to detect and react to unpredictable obstacles
- There must be some method of producing a map of the yard, which will include locating and identifying PNIOs and PNOs
- There must be a communication link between the system and the internet or a local wireless network
- The system must have some kind of home base or dock for it to be secured, maintained, updated, recharged or refueled, and similar
5. Practical Implementation Considerations
5.1. Requirements and Architecture Detailing
5.2. Modeling and Documentation
5.3. Prototyping and Simulations
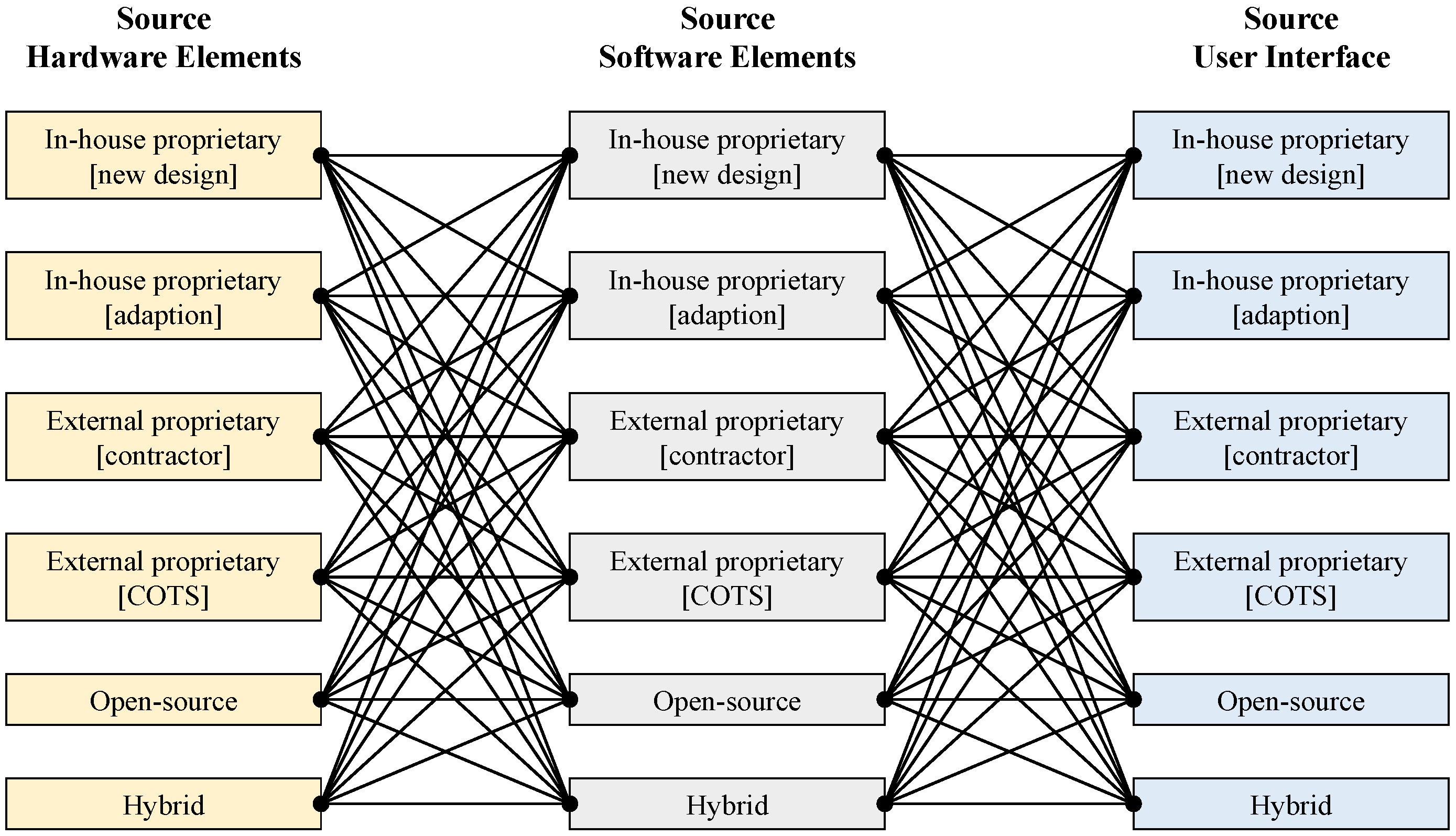
5.4. System Realization
- In-house proprietary-new design: The lab or company building the mowing system will develop the component from scratch and use a new design under this OEM. This component is assumed to be made only for the mowing system under development and is optimized for it.
- In-house proprietary-adaption: The lab or company building the mowing system selects or adapts an existing proprietary component (internally-developed) to use on the mowing system.
- External proprietary-contractor: Similar to #1 but the mower system manufacturer does not have the capability so the component is out-sourced to a contractor to produce
- External proprietary-COTS: This is the adoption or adaption of a proprietary (external) but commercial off-the-shelf (COTS) component in the mowing system
- Open source: The component is an open-source design that can be used and adapted freely. This will be especially useful in the development of the software components, as Robot Operating Systems (ROS) [48,49,50,88,89] are available, as well as other open-source tools such as OpenCV [90] for machine vision. ROS can provide a wide variety of important software packages which can be used as-is or as a template for the actual software used; particularly useful packages include SLAM, pose estimation, firmware, and sensor fusion [48,89]. Open source software (and hardware) is very useful in the research arena and can save a lot of time and effort during development. They may also be useful in some applications on the commercial side, but this must be a decision by the stakeholders and not something that can be hard-wired into a system design framework. It is well-known that open-source, wide-use hardware and software (such as kit robots and ROS) are generally less reliable and efficient that single-use, purpose-built proprietary elements [51,91,92,93], but they may be appropriate and even desirable for some commercial designs. Therefore, the use will depend also on the domain of applicability, the amount of control the producer grants to the user, and the goals of the design.
- Hybrid The development strategy for the component or subsystem which is a hybrid of the previously described strategies
5.5. Verification, Validation, and Accreditation
6. Conclusions and Final Remarks
7. Important Future Work Directions
- Development of test courses for the VV&A of semi-autonomous mowing systems
- Development and refinement of user interfaces that can be used with these and other types of mowing systems
- Assessment of the reliability of the system and various system components, especially any hardware and sensors mounted on the robot
- Mowing robots may be subject to more vibration (both regular and unexpected) than other robotic systems - the effects of this on performance and reliability should be evaluated
- Develop a user training program for operating, maintaining, and repairing a user-integrated semi-autonomous mowing system
- A comparison of performance and trade-offs between power sources for the robot are needed. Unlike many robotic systems it is feasible, and perhaps even desirable, to use a small internal combustion engine as a power source for this kind of system. Comparison with a battery-driven system is essential in future studies.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Grand View Research. Lawn Mowers Market Size, Share & Trends Analysis Report by Product (Petrol, Electric, Manual, Robotic), by End Use (Residential, Commercial & Govt.), by Region (MEA, Asia Pacific, North America), and Segment Forecasts, 2019–2025. Technical Report. 2019. Industry Report Number GVR-1-68038-927-2. Available online: https://www.grandviewresearch.com/industry-analysis/lawn-mowers-market (accessed on 23 June 2019).
- Tribelhorn, B.; Dodds, Z. Evaluating the Roomba: A low-cost, ubiquitous platform for robotics research and education. In Proceedings of the 2007 IEEE International Conference on Robotics and Automation, Roma, Italy, 10–14 April 2007; pp. 1393–1399. [Google Scholar] [CrossRef]
- Aponte-Roa, D.A.; Collazo, X.; Goenaga, M.; Espinoza, A.A.; Vazquez, K. Development and Evaluation of a Remote Controlled Electric Lawn Mower. In Proceedings of the 2019 IEEE 9th Annual Computing and Communication Workshop and Conference (CCWC), Las Vegas, NV, USA, 7–9 January 2019. [Google Scholar] [CrossRef]
- Hicks, R.W., II; Hall, E.L. Survey of robot lawn mowers. In Intelligent Robots and Computer Vision XIX: Algorithms, Techniques, and Active Vision; Casasent, D.P., Ed.; SPIE: Bellingham, WA, USA, 2000. [Google Scholar] [CrossRef]
- Sahin, H.; Givenc, L. Household robotics: Autonomous devices for vacuuming and lawn mowing [Applications of control]. IEEE Control Syst. 2007, 27, 20–96. [Google Scholar] [CrossRef]
- Gregg, M.; Schwartz, E.M.; Arroyo, A.A. Autonomous lawn care applications. In Proceedings of the 2006 Florida Conference on Recent Advances in Robotics, Miami, FL, USA, 25–26 May 2006. [Google Scholar]
- Norris, W.R.; Patterson, A.E. Automation, Autonomy, and Semi-Automomy: A Brief Definition Relative to Robotics and Machine Systems; Technical Report; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2019; Available online: http://hdl.handle.net/2142/104214 (accessed on 15 July 2019).
- Shiu, B.M.; Lin, C.L. Design of an autonomous lawn mower with optimal route planning. In Proceedings of the 2008 IEEE International Conference on Industrial Technology, Chengdu, China, 21–24 April 2008. [Google Scholar] [CrossRef]
- Nourani-Vatani, N.; Bosse, M.; Roberts, J.; Dunbabin, M. Practical path planning and obstacle avoidance and autonomous mowing. In Proceedings of the Australasian Conference on Robotics and Automation, Auckland, New Zealand, 6–8 December 2006. [Google Scholar]
- Wasif, M. Design and implementation of autonomous Lawn-Mower Robot controller. In Proceedings of the 2011 7th International Conference on Emerging Technologies, Islamabad, Pakistan, 5–6 September 2011. [Google Scholar] [CrossRef]
- Daltorio, K.A.; Rolin, A.D.; Beno, J.A.; Hughes, B.E.; Schepelmann, A.; Branicky, M.S.; Quinn, R.D.; Green, J.M. An obstacle-edging reflex for an autonomous lawnmower. In Proceedings of the IEEE/ION Position, Location and Navigation Symposium, Indian Wells, CA, USA, 4–6 May 2010; pp. 1079–1092. [Google Scholar] [CrossRef]
- Peless, E.; Abramson, S.; Dror, G. Navigation Method and System for Autonomous Machines with Markers Defining the Working Area. Patent Number US6984952B2, 10 January 2006. Available online: https://patents.google.com/patent/US6984952 (accessed on 15 July 2019).
- Samad, A.M.; Kamarulzaman, N.; Hamdani, M.A.; Mastor, T.A.; Hashim, K.A. The potential of Unmanned Aerial Vehicle (UAV) for civilian and mapping application. In Proceedings of the 2013 IEEE 3rd International Conference on System Engineering and Technology, Shah Alam, Malaysia, 19–20 August 2013; pp. 313–318. [Google Scholar] [CrossRef]
- Choi, J.; Lee, J.; Kim, D.; Soprani, G.; Cerri, P.; Broggi, A.; Yi, K. Environment-Detection-and-Mapping Algorithm for Autonomous Driving in Rural or Off-Road Environment. IEEE Trans. Intell. Transp. Syst. 2012, 13, 974–982. [Google Scholar] [CrossRef]
- Franzius, M.; Dunn, M.; Einecke, N.; Dirnberger, R. Embedded Robust Visual Obstacle Detection on Autonomous Lawn Mowers. In Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), Honolulu, HI, USA, 21–26 July 2017. [Google Scholar] [CrossRef]
- Schepelmann, A.; Hudson, R.E.; Merat, F.L.; Quinn, R.D. Visual segmentation of lawn grass for a mobile robotic lawnmower. In Proceedings of the 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 18–22 October 2010; pp. 734–739. [Google Scholar] [CrossRef]
- Guo, Y.; Sun, F. Efficient visual obstacle avoidance for robotic mower. In Proceedings of the 2017 2nd International Conference on Control and Robotics Engineering (ICCRE), Bangkok, Thailand, 1–3 April 2017; pp. 23–28. [Google Scholar] [CrossRef]
- Zhang, L.; Verma, B.; Stockwell, D.; Chowdhury, S. Density Weighted Connectivity of Grass Pixels in image frames for biomass estimation. Expert Syst. Appl. 2018, 101, 213–227. [Google Scholar] [CrossRef] [Green Version]
- Bai, J.; Lian, S.; Liu, Z.; Wang, K.; Liu, D. Deep Learning Based Robot for Automatically Picking Up Garbage on the Grass. IEEE Trans. Consum. Electron. 2018, 64, 382–389. [Google Scholar] [CrossRef] [Green Version]
- Kounalakis, T.; Malinowski, M.J.; Chelini, L.; Triantafyllidis, G.A.; Nalpantidis, L. A Robotic System Employing Deep Learning for Visual Recognition and Detection of Weeds in Grasslands. In Proceedings of the 2018 IEEE International Conference on Imaging Systems and Techniques (IST), Krakow, Poland, 16–18 October 2018. [Google Scholar] [CrossRef]
- Choset, H. Coverage for robotics—A survey of recent results. Ann. Math. Artif. Intell. 2001, 31, 113–126. [Google Scholar] [CrossRef]
- Choset, H.; Pignon, P. Coverage Path Planning: The Boustrophedon Cellular Decomposition. In Field and Service Robotics; Springer: London, UK, 1998; pp. 203–209. [Google Scholar] [CrossRef] [Green Version]
- Acar, E.U.; Choset, H.; Rizzi, A.A.; Atkar, P.N.; Hull, D. Morse Decompositions for Coverage Tasks. Int. J. Robot. Res. 2002, 21, 331–344. [Google Scholar] [CrossRef]
- Wong, S.; MacDonald, B. A topological coverage algorithm for mobile robots. In Proceedings of the 2003 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2003) (Cat. No.03CH37453), Las Vegas, NV, USA, 27–31 October 2003; pp. 1685–1690. [Google Scholar] [CrossRef]
- Yao, Z. Finding Efficient Robot Path for the Complete Coverage of A Known Space. In Proceedings of the 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China, 9–15 October 2006; pp. 3369–3374. [Google Scholar] [CrossRef]
- Elhoseny, M.; Tharwat, A.; Hassanien, A.E. Bezier Curve Based Path Planning in a Dynamic Field using Modified Genetic Algorithm. J. Comput. Sci. 2018, 25, 339–350. [Google Scholar] [CrossRef]
- Darwish, A.H.; Joukhadar, A.; Kashkash, M. Using the Bees Algorithm for wheeled mobile robot path planning in an indoor dynamic environment. Cog. Eng. 2018, 5. [Google Scholar] [CrossRef]
- Ferrer, G.; Sanfeliu, A. Anticipative kinodynamic planning: multi-objective robot navigation in urban and dynamic environments. Auton. Robot. 2018, 43, 1473–1488. [Google Scholar] [CrossRef]
- Liu, H.; Ma, J.; Huang, W. Sensor-based complete coverage path planning in dynamic environment for cleaning robot. CAAI Trans. Intell. Technol. 2018, 3, 65–72. [Google Scholar] [CrossRef]
- Reinhart, R.; Shareef, Z.; Steil, J. Hybrid Analytical and Data-Driven Modeling for Feed-Forward Robot Control †. Sensors 2017, 17, 311. [Google Scholar] [CrossRef] [PubMed]
- Wei, K.; Ren, B. A Method on Dynamic Path Planning for Robotic Manipulator Autonomous Obstacle Avoidance Based on an Improved RRT Algorithm. Sensors 2018, 18, 571. [Google Scholar] [CrossRef] [PubMed]
- Pham, D.; Ghanbarzadeh, A.; Koç, E.; Otri, S.; Rahim, S.; Zaidi, M. The Bees Algorithm—A Novel Tool for Complex Optimisation Problems. In Intelligent Production Machines and Systems; Elsevier: Amsterdam, The Netherlands, 2006; pp. 454–459. [Google Scholar] [CrossRef]
- Kuusniemi, H.; Wieser, A.; Lachapelle, G.; Takala, J. User-level reliability monitoring in urban personal satellite-navigation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 1305–1318. [Google Scholar] [CrossRef]
- Walden, D.; Roedler, G.; Forsberg, K.; Hamelin, R.; Shortell, T. INCOSE Systems Engineering Handbook: A Guide for System Life Cycle Processes and Activities, 4th ed.; John Wiley & Sons: Hoboken, NJ, USA, 2015. [Google Scholar]
- Bahill, A.; Gissing, B. Re-evaluating systems engineering concepts using systems thinking. IEEE Trans. Syst. Man Cybern. Part C (Appl. Rev.) 1998, 28, 516–527. [Google Scholar] [CrossRef]
- Yuan, Y.; Patterson, A.E.; Patterson, T.L.; Norris, W.R. User-Integrated Semi-Autonomous Lawn Mowing Systems: Example Basic, Functional, Non-Functional, and Safety and Security Requirements; Technical Report; University of Illinois at Urbana-Champaign: Champaign, IL, USA, 2019; Available online: http://hdl.handle.net/2142/104210 (accessed on 15 July 2019).
- Katina, P.F.; Keating, C.B.; Jaradat, R.M. System requirements engineering in complex situations. Requir. Eng. 2012, 19, 45–62. [Google Scholar] [CrossRef]
- Pattar, S.; Buyya, R.; Venugopal, K.R.; Iyengar, S.S.; Patnaik, L.M. Searching for the IoT Resources: Fundamentals, Requirements, Comprehensive Review, and Future Directions. IEEE Commun. Surv. Tutor. 2018, 20, 2101–2132. [Google Scholar] [CrossRef]
- Long, J.E. Relationships between common graphical representations used in system engineering. INSIGHT 2018, 21, 8–11. [Google Scholar] [CrossRef]
- Ambreen, T.; Ikram, N.; Usman, M.; Niazi, M. Empirical research in requirements engineering: Trends and opportunities. Requir. Eng. 2016, 23, 63–95. [Google Scholar] [CrossRef]
- Guevara-Vega, C.P.; Guzmán-Chamorro, E.D.; Guevara-Vega, V.A.; Andrade, A.V.B.; Quiña-Mera, J.A. Functional Requirement Management Automation and the Impact on Software Projects: Case Study in Ecuador. In Advances in Intelligent Systems and Computing; Springer: Berlin, Germany, 2019; pp. 317–324. [Google Scholar] [CrossRef]
- Adams, K.M. Nonfunctional Requirements in Systems Analysis and Design; Springer: Berlin, Germany, 2015. [Google Scholar] [CrossRef]
- Sun, P.; Yang, J.; Ming, H.; Chang, C.K. A Multi-layered Desires Based Framework to Detect Users’ Evolving Non-functional Requirements. In Proceedings of the 2018 IEEE 42nd Annual Computer Software and Applications Conference (COMPSAC), Tokyo, Japan, 23–27 July 2018. [Google Scholar] [CrossRef]
- Niu, N.; Brinkkemper, S.; Franch, X.; Partanen, J.; Savolainen, J. Requirements Engineering and Continuous Deployment. IEEE Softw. 2018, 35, 86–90. [Google Scholar] [CrossRef] [Green Version]
- Nazaruka, E.; Osis, J. The Formal Reference Model for Software Requirements. In Communications in Computer and Information Science; Springer: Berlin, Germany, 2019; pp. 352–372. [Google Scholar] [CrossRef]
- Curcio, K.; Navarro, T.; Malucelli, A.; Reinehr, S. Requirements engineering: A systematic mapping study in agile software development. J. Syst. Softw. 2018, 139, 32–50. [Google Scholar] [CrossRef]
- Haq, S.U.; Gu, D.; Liang, C.; Abdullah, I. Project governance mechanisms and the performance of software development projects: Moderating role of requirements risk. Int. J. Proj. Manag. 2019, 37, 533–548. [Google Scholar] [CrossRef]
- ROS. Available online: https://www.ros.org/ (accessed on 11 August 2019).
- Koubaa, A. Robot Operating System (ROS); Springer: Berlin, Germany, 2016. [Google Scholar]
- Boren, J.; Cousins, S. Exponential Growth of ROS [ROS Topics]. IEEE Robot. Autom. Mag. 2011, 18, 19–20. [Google Scholar] [CrossRef]
- Breiling, B.; Dieber, B.; Schartner, P. Secure communication for the robot operating system. In Proceedings of the 2017 Annual IEEE International Systems Conference (SysCon), Montreal, QC, Canada, 24–27 April 2017. [Google Scholar] [CrossRef]
- Kliem, R.L.; Ludin, I.S. Reducing Project Risk; Routledge: Abingdon, UK, 2019. [Google Scholar] [CrossRef]
- Ionita, D.; van der Velden, C.; Ikkink, H.J.K.; Neven, E.; Daneva, M.; Kuipers, M. Towards Risk-Driven Security Requirements Management in Agile Software Development. In Lecture Notes in Business Information Processing; Springer: Berlin, Germany, 2019; pp. 133–144. [Google Scholar] [CrossRef]
- Mayer, N.; Aubert, J.; Grandry, E.; Feltus, C.; Goettelmann, E.; Wieringa, R. An integrated conceptual model for information system security risk management supported by enterprise architecture management. Softw. Syst. Model. 2018, 18, 2285–2312. [Google Scholar] [CrossRef]
- Rehman, S.; Gruhn, V. An Effective Security Requirements Engineering Framework for Cyber-Physical Systems. Technologies 2018, 6, 65. [Google Scholar] [CrossRef]
- Ding, D.; Han, Q.L.; Xiang, Y.; Ge, X.; Zhang, X.M. A survey on security control and attack detection for industrial cyber-physical systems. Neurocomputing 2018, 275, 1674–1683. [Google Scholar] [CrossRef]
- Murthy, D.; Østerås, T.; Rausand, M. Component reliability specification. Reliab. Eng. Syst. Saf. 2009, 94, 1609–1617. [Google Scholar] [CrossRef]
- Aal, A.; Polte, T. On component reliability and system reliability for automotive applications. In Proceedings of the 2012 IEEE International Integrated Reliability Workshop Final Report, South Lake Tahoe, CA, USA, 14–18 October 2012. [Google Scholar] [CrossRef]
- Elsayed, E. Reliability Engineering; John Wiley & Sons: Hoboken, NJ, USA, 2012. [Google Scholar]
- Hohenbichler, M.; Rackwitz, R. First-order concepts in system reliability. Struct. Saf. 1982, 1, 177–188. [Google Scholar] [CrossRef]
- Chern, M.S. On the computational complexity of reliability redundancy allocation in a series system. Oper. Res. Lett. 1992, 11, 309–315. [Google Scholar] [CrossRef]
- Frey, D.; Palladino, J.; Sullivan, J.; Atherton, M. Part count and design of robust systems. Syst. Eng. 2007, 10, 203–221. [Google Scholar] [CrossRef]
- ElMaraghy, W.; ElMaraghy, H.; Tomiyama, T.; Monostori, L. Complexity in engineering design and manufacturing. CIRP Ann. 2012, 61, 793–814. [Google Scholar] [CrossRef]
- Xu, Z.; Kuo, W.; Lin, H.H. Optimization limits in improving system reliability. IEEE Trans. Reliab. 1990, 39, 51–60. [Google Scholar] [CrossRef]
- Billinton, R.; Allan, R.N. Reliability Evaluation of Engineering Systems; Springer: Cham, Switzerland, 1983. [Google Scholar]
- NASA. NASA Systems Engineering Handbook SP-2016-6105 REV 2; National Aeronautics and Space Administration: Washington, DC, USA, 2016.
- Jo, K.; Kim, J.; Kim, D.; Jang, C.; Sunwoo, M. Development of Autonomous Car-Part I: Distributed System Architecture and Development Process. IEEE Trans. Ind. Electron. 2014, 61, 7131–7140. [Google Scholar] [CrossRef]
- Nuseibeh, B. Weaving together requirements and architectures. Computer 2001, 34, 115–119. [Google Scholar] [CrossRef]
- Bahill, A.T.; Henderson, S.J. Requirements development, verification, and validation exhibited in famous failures. Syst. Eng. 2005, 8, 1–14. [Google Scholar] [CrossRef]
- Keating, C.B.; Padilla, J.J.; Adams, K. System of Systems Engineering Requirements: Challenges and Guidelines. Eng. Manag. J. 2008, 20, 24–31. [Google Scholar] [CrossRef]
- David, O.; Ascough, J.; Lloyd, W.; Green, T.; Rojas, K.; Leavesley, G.; Ahuja, L. A software engineering perspective on environmental modeling framework design: The Object Modeling System. Environ. Model. Softw. 2013, 39, 201–213. [Google Scholar] [CrossRef]
- Briand, L. Software documentation: How much is enough? In Proceedings of the Seventh European Conference onSoftware Maintenance and Reengineering, Benevento, Italy, 28–28 March 2003. [Google Scholar] [CrossRef]
- Laliberte, T.; Gosselin, C.; Cote, G. Practical prototyping. IEEE Robot. Autom. Mag. 2001, 8, 43–52. [Google Scholar] [CrossRef]
- Won, J.; DeLaurentis, K.; Mavroidis, C. Rapid prototyping of robotic systems. In Proceedings of the 2000 ICRA. Millennium Conference International Conference on Robotics and Automation. Symposia Proceedings (Cat. No.00CH37065), San Francisco, CA, USA, 24–28 April 2000. [Google Scholar] [CrossRef]
- Ferretti, G.; Magnani, G.; Rocco, P. Virtual prototyping of mechatronic systems. Ann. Rev. Control 2004, 28, 193–206. [Google Scholar] [CrossRef]
- Hamblen, J.O.; van Bekkum, G.M.E. An Embedded Systems Laboratory to Support Rapid Prototyping of Robotics and the Internet of Things. IEEE Trans. Educ. 2013, 56, 121–128. [Google Scholar] [CrossRef]
- Lichtenstern, M.; Frassl, M.; Perun, B.; Angermann, M. A prototyping environment for interaction between a human and a robotic multi-agent system. In Proceedings of the Seventh Annual ACM/IEEE International Conference on Human-Robot Interaction-HRI’12, Boston, MA, USA, 5–8 March 2012. [Google Scholar] [CrossRef]
- Onuh, S. Rapid prototyping integrated systems. Rapid Prototyp. J. 2001, 7, 220–223. [Google Scholar] [CrossRef]
- Hwang, K.S.; Hsiao, W.H.; Shing, G.T.; Chen, K.J. Rapid Prototyping Platform for Robotics Applications. IEEE Trans. Educ. 2011, 54, 236–246. [Google Scholar] [CrossRef]
- Tejado, I.; Serrano, J.; Pérez, E.; Torres, D.; Vinagre, B.M. Low-cost Hardware-in-the-loop Testbed of a Mobile Robot to Support Learning in Automatic Control and Robotics. IFAC-PapersOnLine 2016, 49, 242–247. [Google Scholar] [CrossRef]
- Kumar, A.; Mittal, A.; Arya, R.; Shah, A.; Garg, S.; Kumar, R. Hardware in the loop based simulation of a robotic system with real time control and animation of working model. In Proceedings of the 2017 International Conference on Inventive Systems and Control (ICISC), Coimbatore, India, 19–20 January 2017. [Google Scholar] [CrossRef]
- Sarhadi, P.; Yousefpour, S. State of the art: Hardware in the loop modeling and simulation with its applications in design, development and implementation of system and control software. Int. J. Dyn. Control 2015, 3, 470–479. [Google Scholar] [CrossRef]
- Louali, R.; Gacem, H.; Elouardi, A.; Bouaziz, S. Implementation of an UAV Guidance, Navigation and Control System based on the CAN data bus: Validation using a Hardware In the Loop Simulation. In Proceedings of the 2017 IEEE International Conference on Advanced Intelligent Mechatronics (AIM), Munich, Germany, 3–7 July 2017. [Google Scholar] [CrossRef]
- Thomas, D.; Mesmer, B. Virtual Systems Integration Using Model Based Systems Engineering; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2016. [Google Scholar] [CrossRef]
- Delgado, E.D.; Panduro, J.J.R.; Álvarez, E.C.B.; Jurado, F.J.E.; Frías, E.F.G. Low cost DSP-based educational embedded platform for real-time simulation and fast implementation of complex systems in Simulink. Comput. Appl. Eng. Educ. 2019, 27, 955–970. [Google Scholar] [CrossRef]
- Cale, J.L.; Johnson, B.B.; DallAnese, E.; Young, P.M.; Duggan, G.; Bedge, P.A.; Zimmerle, D.; Holton, L. Mitigating Communication Delays in Remotely Connected Hardware-in-the-Loop Experiments. IEEE Trans. Ind. Electron. 2018, 65, 9739–9748. [Google Scholar] [CrossRef]
- Muratore, L.; Laurenzi, A.; Hoffman, E.M.; Rocchi, A.; Caldwell, D.G.; Tsagarakis, N.G. XBotCore: A Real-Time Cross-Robot Software Platform. In Proceedings of the 2017 First IEEE International Conference on Robotic Computing (IRC), Taichung, Taiwan, 10–12 April 2017. [Google Scholar] [CrossRef]
- Bloomberg. The Rise of ROS: Nearly 55% of Total Commercial Robots Shipped in 2024 Will Have at Least One Robot Operating System Package. Available online: https://www.bloomberg.com/press-releases/2019-05-16/the-rise-of-ros-nearly-55-of-total-commercial-robots-shipped-in-2024-will-have-at-least-one-robot-operating-system-package (accessed on 30 August 2019).
- ROS Packages List. Available online: https://www.ros.org/browse/list.php?package_type=package (accessed on 30 August 2019).
- OpenCV. Available online: https://opencv.org/ (accessed on 30 August 2019).
- Ven, K.; Verelst, J.; Mannaert, H. Should You Adopt Open Source Software? IEEE Softw. 2008, 25, 54–59. [Google Scholar] [CrossRef]
- Dey, N.; Mukherjee, A. Embedded Systems and Robotics with Open Source Tools; CRC Press: Boca Raton, FL, USA, 2018. [Google Scholar] [CrossRef]
- Woodard, J. Big data and Ag-Analytics. Agric. Financ. Rev. 2016, 76, 15–26. [Google Scholar] [CrossRef]
- Wallace, D.; Fujii, R. Software verification and validation: an overview. IEEE Softw. 1989, 6, 10–17. [Google Scholar] [CrossRef]
- Forsberg, K.; Mooz, H. The Relationship of System Engineering to the Project Cycle. INCOSE Int. Symp. 1991, 1, 57–65. [Google Scholar] [CrossRef]
- Babuska, I.; Oden, J. Verification and validation in computational engineering and science: Basic concepts. Comput. Methods Appl. Mech. Eng. 2004, 193, 4057–4066. [Google Scholar] [CrossRef]
- Sankararaman, S.; Mahadevan, S. Integration of model verification, validation, and calibration for uncertainty quantification in engineering systems. Reliab. Eng. Syst. Saf. 2015, 138, 194–209. [Google Scholar] [CrossRef]
- Strasser, T.; Andrén, F.P.; Lauss, G.; Bründlinger, R.; Brunner, H.; Moyo, C.; Seitl, C.; Rohjans, S.; Lehnhoff, S.; Palensky, P.; et al. Towards holistic power distribution system validation and testing—An overview and discussion of different possibilities. e & i Elektrotech. und Inf. 2016, 134, 71–77. [Google Scholar] [CrossRef]
- Madni, A.M.; Sievers, M.W.; Humann, J.; Ordoukhanian, E.; D’Ambrosio, J.; Sundaram, P. Model-Based Approach for Engineering Resilient System-of-Systems: Application to Autonomous Vehicle Networks. In Disciplinary Convergence in Systems Engineering Research; Springer: Berlin, Germany, 2017; pp. 365–380. [Google Scholar]












© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Patterson, A.E.; Yuan, Y.; Norris, W.R. Development of User-Integrated Semi-Autonomous Lawn Mowing Systems: A Systems Engineering Perspective and Proposed Architecture. AgriEngineering 2019, 1, 453-474. https://doi.org/10.3390/agriengineering1030033
Patterson AE, Yuan Y, Norris WR. Development of User-Integrated Semi-Autonomous Lawn Mowing Systems: A Systems Engineering Perspective and Proposed Architecture. AgriEngineering. 2019; 1(3):453-474. https://doi.org/10.3390/agriengineering1030033
Chicago/Turabian StylePatterson, Albert E., Yang Yuan, and William R. Norris. 2019. "Development of User-Integrated Semi-Autonomous Lawn Mowing Systems: A Systems Engineering Perspective and Proposed Architecture" AgriEngineering 1, no. 3: 453-474. https://doi.org/10.3390/agriengineering1030033
APA StylePatterson, A. E., Yuan, Y., & Norris, W. R. (2019). Development of User-Integrated Semi-Autonomous Lawn Mowing Systems: A Systems Engineering Perspective and Proposed Architecture. AgriEngineering, 1(3), 453-474. https://doi.org/10.3390/agriengineering1030033