Abstract
Unmanned Aerial Vehicles (UAVs) are a novel up-and-coming technology with wide applicability and great potential to be used in agricultural systems for spraying applications. However, the cost-effectiveness of this application is still rather uncertain. The present study utilized actual data from field applications to analyze the critical components and parameters in the potential case of using UAV sprayers for the control of olive fruit flies in order to assess the operational costs. The results are compared with the costs of two traditional spraying methods: manual spaying by workers using backpack sprayers and manual spraying assisted by a tractor. The case of the olive fruit fly was selected because it involves costly, time consuming, and laborious manual spraying. Furthermore, the bait character of spraying in these applications does not require full canopy coverage, making it ideal for UAV applications. A parameterized computational model was developed to assess the costs of labor, capital spending, repair and maintenance, energy, licensees, fees and taxes, and storage for each of the three methods. In addition, the cost for surveillance was also accounted for with the UAV method. Consequently, a sensitivity analysis was performed to examine the impact of the most crucial parameters. The results showed that the cost of spraying with a UAV was 1.45 to 2 times higher than the traditional methods, mainly due to the high capital spending resulting from a low economic life. There are opportunities, however, of improving the economic performance, making it compatible to the traditional methods, by using a smaller UAV with longer lasting batteries and by expanding its annual use beyond the needs of olive fruit fly control.
1. Introduction
Recent technological developments have led agriculture towards digitization, utilizing both ground or aerial automated systems. The use of Unmanned Aerial Vehicles (UAVs, also known as drones) in particular, are gaining popularity, mainly due to the availability of such systems for commercial use in agriculture [1,2]. Consequently, UAVs are anticipated to obtain important multipurpose roles in agriculture in the near future, assisting in crop scouting by providing high resolution, intensive remote sensing of fields, as well as by substituting some field operations like crop spraying, fertilizer application, or sowing [3]. In Europe, approximately 25,000 UAVs are estimated to be operating for chemical spraying, seeding, and precision farming applications in agriculture by the year 2035 [4]. Subsequently, UAVs are expected to introduce a new era of pest control and pest management [5]. UAV spraying systems may constitute efficient, low operational cost, and environmentally safe solutions, especially against systematically hazardous enemies like the olive fruit fly.
The specific insect (Dacus oleae) is considered to be the most damaging pest for olive plantations [6]. Its control is based on repetitive, preventive bait sprayings throughout the fruiting period. Decisions for spraying are based on insect population time course information from a network of established traps. Decisions are positive when 5–20 insects are encountered per trap during 5–6 daytime lapse inspections, considering also the growing stage, the annual fruition, the olive variety, and the weather conditions. Usually, 4–7 sprays per year are necessary for their successful control. During the application, one third of the trees are partially sprayed with a liquid spray consisting of a bait substance and a dose of insecticide, following a regular pattern. Spraying starts early in the morning and is usually terminated after 5 to 6 h when the ambient temperature rises above 28 °C and the insect becomes inactive. Each application has to be completed in a short period of time of around 5–6 days (no more than 8 days) [7].
In Greece, where the majority of olive plantations appear in mountainous and hilly landscapes that are hard to access using agricultural equipment, the sprayings are traditionally performed by ground workers equipped with backpack sprayers or assisted by a tractor carrying a sprayer with lances. This requires the occasional use of a workforce, which can sometimes be hard to find and has a high cost. Furthermore, workers are often exposed to risks when handling hazardous agrochemicals, which become even more dangerous due to inappropriate spraying and off-target applications resulting in spray drift [8]. On the other hand, the use of UAVs for crop spraying is a promising up-and-coming technology capable of providing fast, safe, and efficient plant protection, addressing issues such as drifting and soil compaction [9,10]. There are currently many research works highlighting the perspectives of using UAVs for the protection of various crops [11,12,13,14,15]. The main limitations of using such equipment are the low tank capacity and the limited battery endurance [16]. However, they could be an ideal solution for targeted, low-volume applications providing the feasibility to cover hard to access areas. Moreover, the bait character of olive fruit fly spraying does not require full canopy coverage, making it ideal for UAV applications [17].
Apart from the technical and practical aspects, the economical features for the use of UAV sprayers need to be investigated for each crop and type of application. So far, to our knowledge, there are limited studies performing economic feasibility analysis of using such systems for spraying applications. In [10], the authors developed a low-cost modular UAV-based sprayer system and evaluated its performance in citrus and olive groves, comparing it with a conventional spraying system in cost-sensitive terms. This economic feasibility analysis was solely focused on the custom-made system, with a significantly lower purchase cost than the commercially available systems. Another study performed a comprehensive economic analysis comparing spraying applications using commercial conventionally trailed sprayers and UAV sprayers on olives and grapevines. The flight/spraying time for the analysis was based on simulated flight plans exported by flight planning software [5]. Further investigation is required to verify the feasibility of using UAV spraying systems in different agricultural environments and economic conditions.
The scope of the present study was to evaluate the economic perspectives of using UAV spraying as an alternative and sustainable solution for olive fruit fly control in olive groves located in steep, difficult to reach landscapes, which is a very common situation in Greece, where the use of UAV sprayers will have an added value. For this purpose, a parameterized computational model was developed providing the opportunity of estimating the cost of novel UAV spraying and comparing it to the cost of two benchmark traditional bait spraying methods applied in Greece: using workers with backpack sprayers or workers with tractor-assisted lances. The essential key parameters and the components of spraying using each method are identified and quantified. On-site applications were examined to measure the time intervals and other important parameters in real field conditions. Consequently, a sensitivity analysis is applied allowing the recognition of critical components and aspects that should be considered for improving the economic efficiency of the UAV application.
2. Materials and Methods
2.1. Study Cases
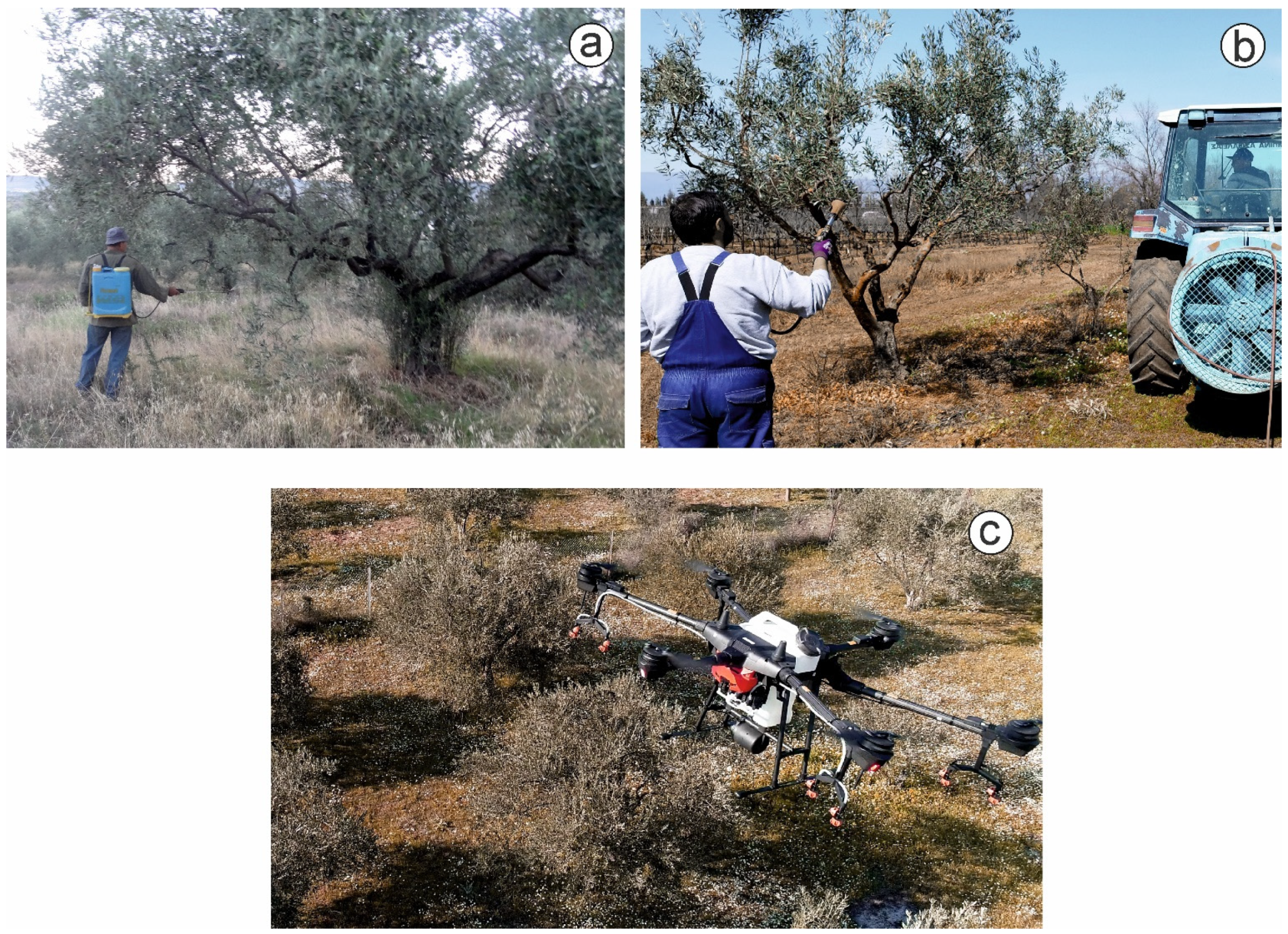
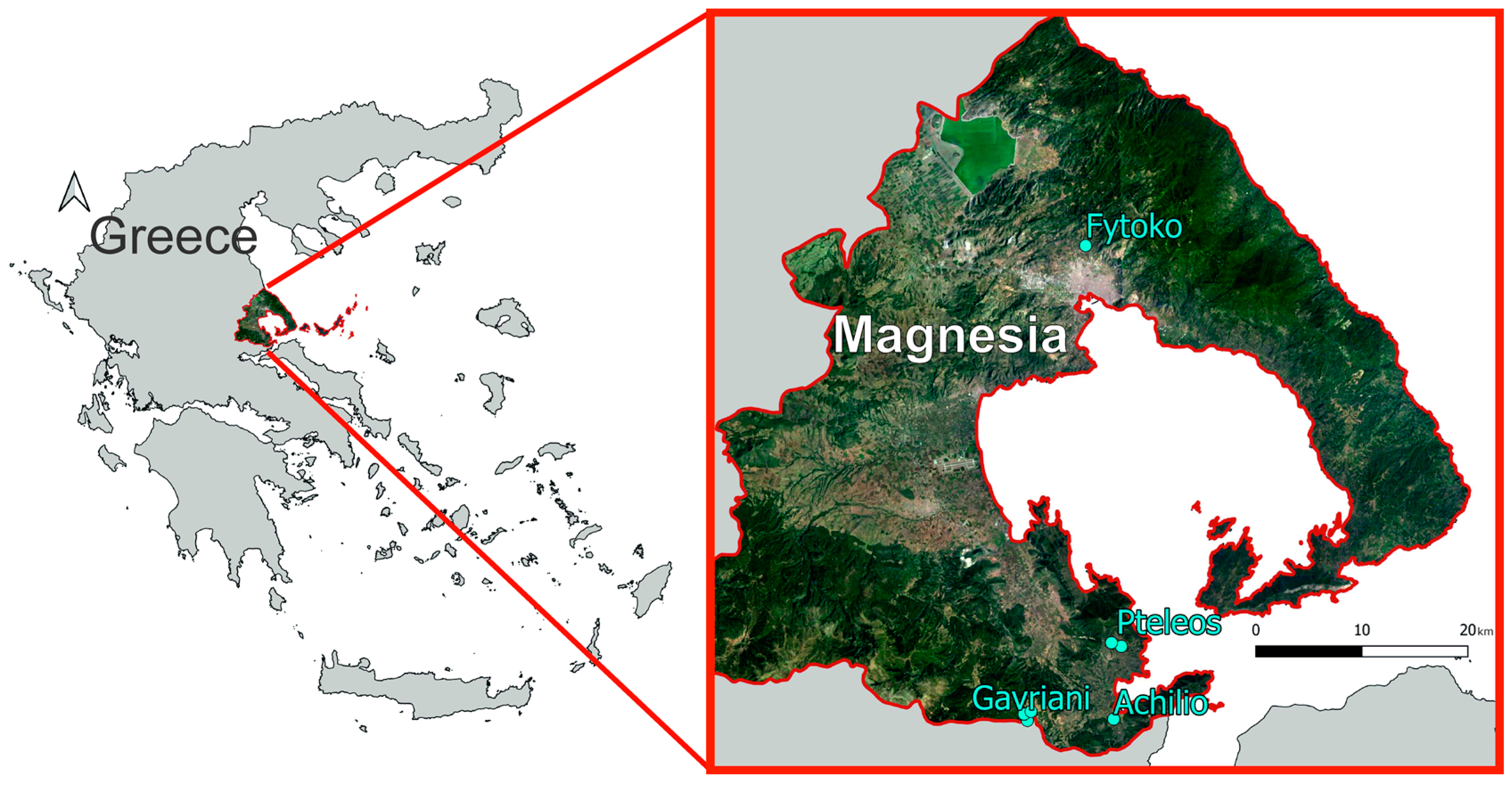
Three alternative methods for olive fruit fly bait control were examined: (1) spraying applied by a workshop comprising of a group of workers carrying backpack sprayers, (2) spraying with a tractor-mounted sprayer and a second worker walking by foot and operating a spray lance connected to a hose, and (3) a novel spraying method with a UAV (Figure 1). The cases were examined in the province of Magnesia, Greece, a region with extended olive production (Figure 2).
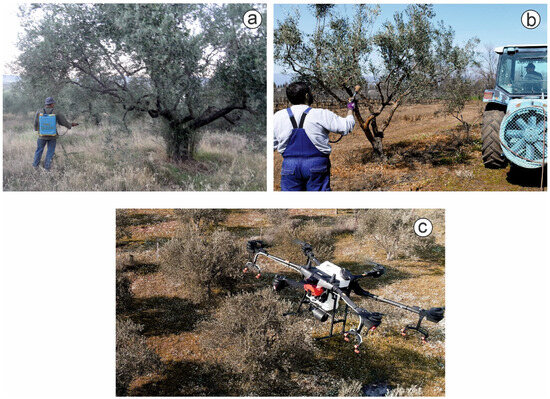
Figure 1.
Traditional spraying with backpack sprayers (a), traditional spraying with lances assisted by a tractor-mounted sprayer (b), and novel spraying with a UAV (c).
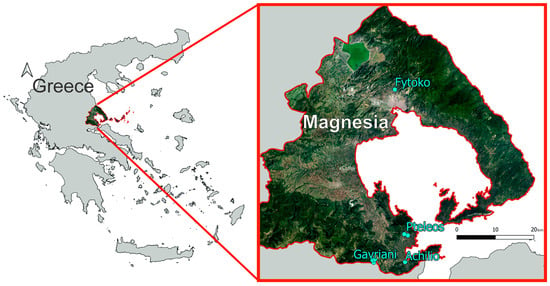
Figure 2.
Study areas in Magnesia, Greece.
2.1.1. Traditional Method with Backpack Sprayers
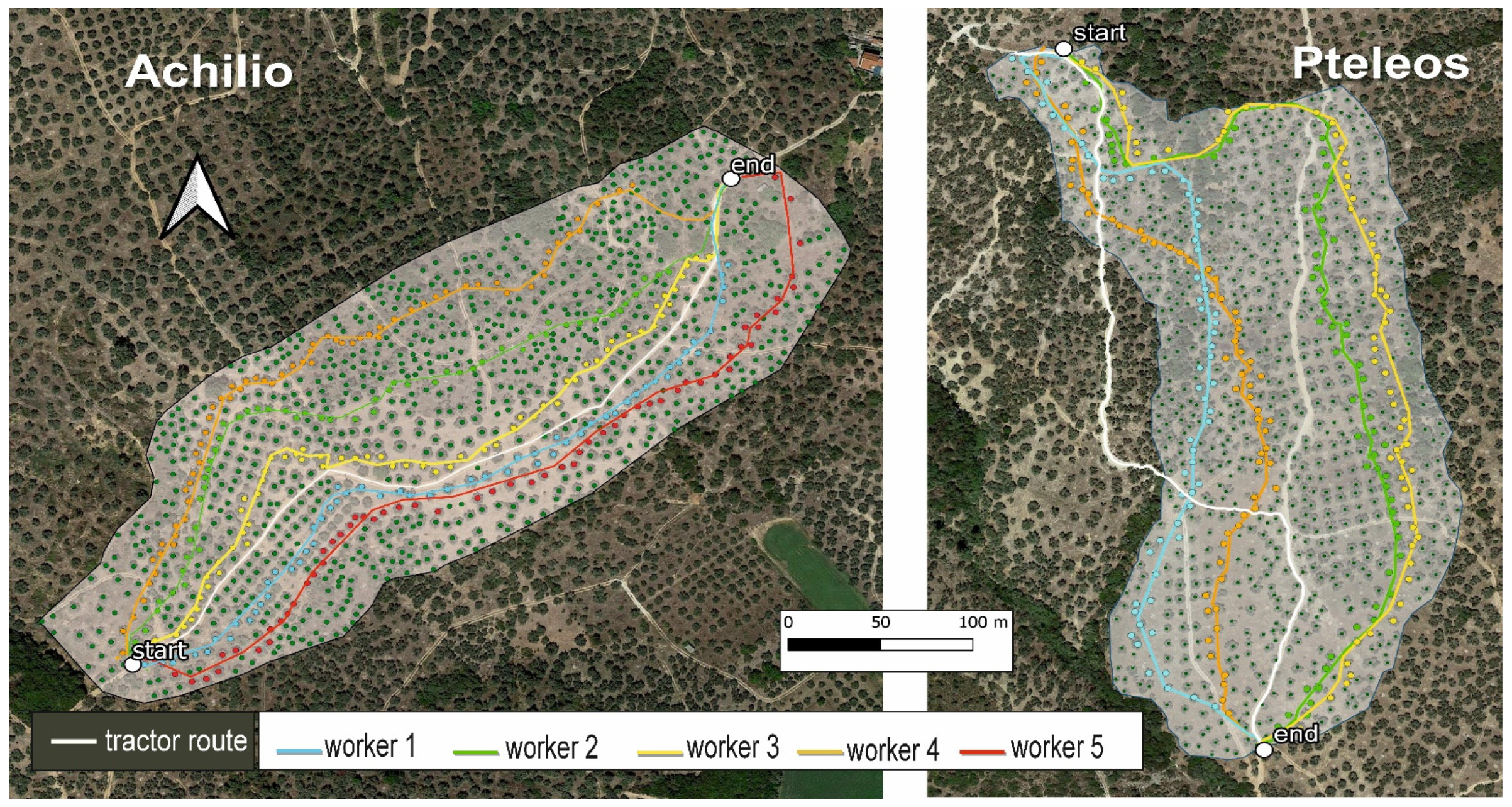
This method is employed in hard to access areas where wheeled machinery cannot enter the terrain. The workshop usually comprises of four to six spray workers, one foreman, and one driver who carries the material and occasionally the workers from place to place. The majority of workers use manually operated sprayers even though some electric devices are now common. The workshop is responsible for an area of 80–150 ha by spraying one third of the trees during a period of four to six days. The workers start from one common point, scatter to perform the spraying and then gather again in another point to refill the spray tanks and continue their work. Each worker applies around 300 mL of spray on selected trees (depending on their size) with medium size droplets of about 500 μm. One worker carrying an 18 L backpack sprayer is expected to spray around 60 trees (and protect around 180 trees) until needing to refill their sprayer. Two such workshops were monitored during two complete working days. The first operated in the region of Achilio, Magnesia, Greece (39.998407° N, 22.959181° E) and comprised five spray workers, one foreman, and one driver and the second in the region of Pteleos, Magnesia, Greece (39.060232° N, 22.957723° E) comprising four spray workers, one foreman, and one driver. All the workers and the tractor drivers were provided with hand-held GNSS devices to control their paths and working times. Detailed data over two consequent spray tank refillings were recorded by inspecting the workshops during their work (Supplementary Material Table S1). The number of sprayed trees, the time of pure work minus the time for breaks, refilling, and moving from one spot to another were also recorded. The area covered and the total number of trees were counted using QGIS software (QGIS Geographic Information System, QGIS Association. http://www.qgis.org, accessed on 23 September 2023) using a Google satellite hybrid XYZ tile (Figure 3). The trees were planted on random schemes and the density was 158 trees per ha in Achilio and 128 trees per ha in Pteleos. As such, six to seven areas are covered by each workshop during their daily work that starts at dawn and terminates around 11:00 to 12:00 pm before the temperature rises too high.
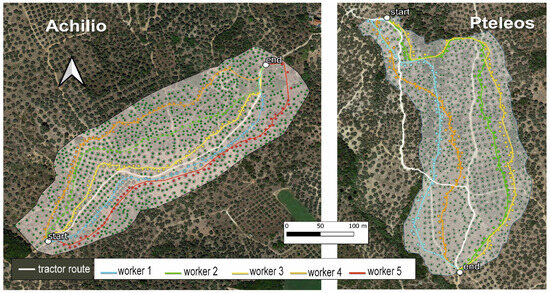
Figure 3.
Areas sprayed over two consecutive tank refillings by two traditional workshops operating with backpack sprayers in the regions of Achilio and Pteleos.
2.1.2. Traditional Method with Tractor-Mounted Sprayer and Workers Handling Lances
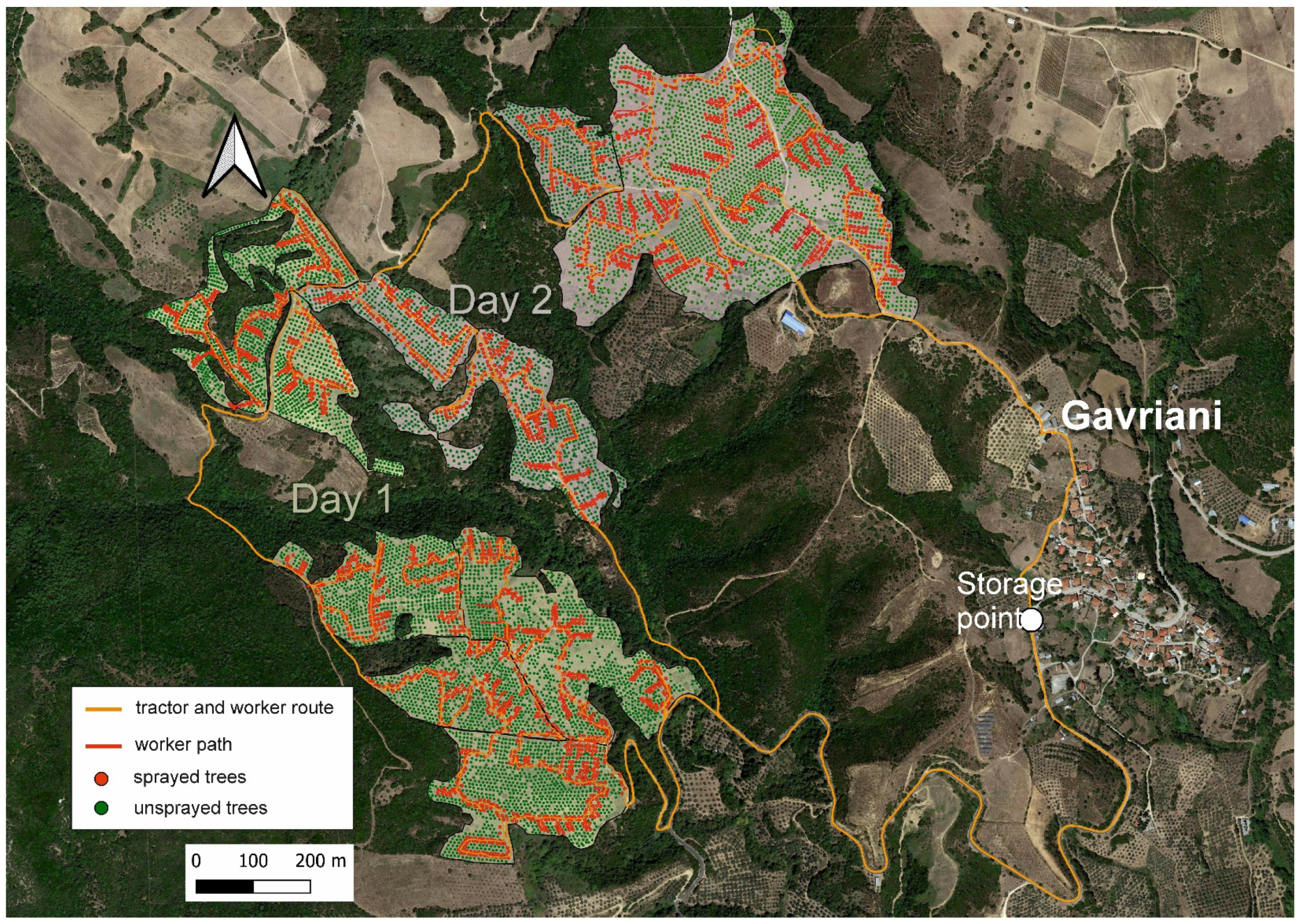
This method is employed in areas where the terrain allows a farm vehicle to enter the fields (tractor or a small truck) carrying a sprayer machine. A common workshop comprises a driver who serves also as a foreman and one or two workers carrying spray-assisted lances with hoses to enable walking some distance aside to spray the nearby trees. The vehicle moves along with the ground workers who also apply around 300 mL per tree. One such workshop comprising one ground worker and one tractor driver was monitored during two complete working days in the region of Gavriani, Magnesia, Greece (39.0038° N, 22.8656° E) (Figure 4). The tractor had a rated power of 44.7 kW and carried a 500 L sprayer machine. In the first day, the workshop covered an area of 27.63 ha and the second day 29.63 ha. The olive groves were planted mainly on random schemes with a density ranging from 158 to 184 trees per ha. The worker and the driver were provided with a GNSS device to record their routes. Time intervals for breaks, traveling from one place to another, and other spraying parameters were also recorded (Supplementary Material Table S2). The total number of olive trees in the areas were counted by QGIS using a Google satellite hybrid XYZ tile.
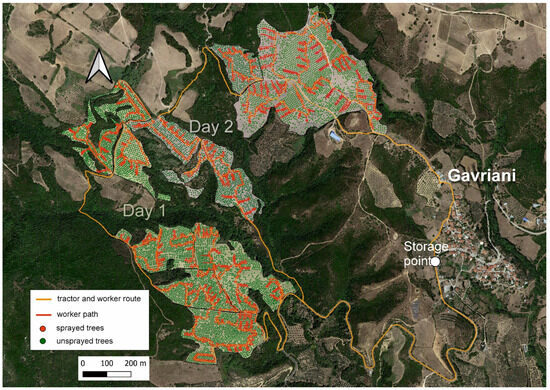
Figure 4.
Areas in the region of Gavriani sprayed during a two-day job by a workshop comprising one spray worker operating a lance supported from a tractor-mounted sprayer.
2.1.3. Novel Method with a UAV
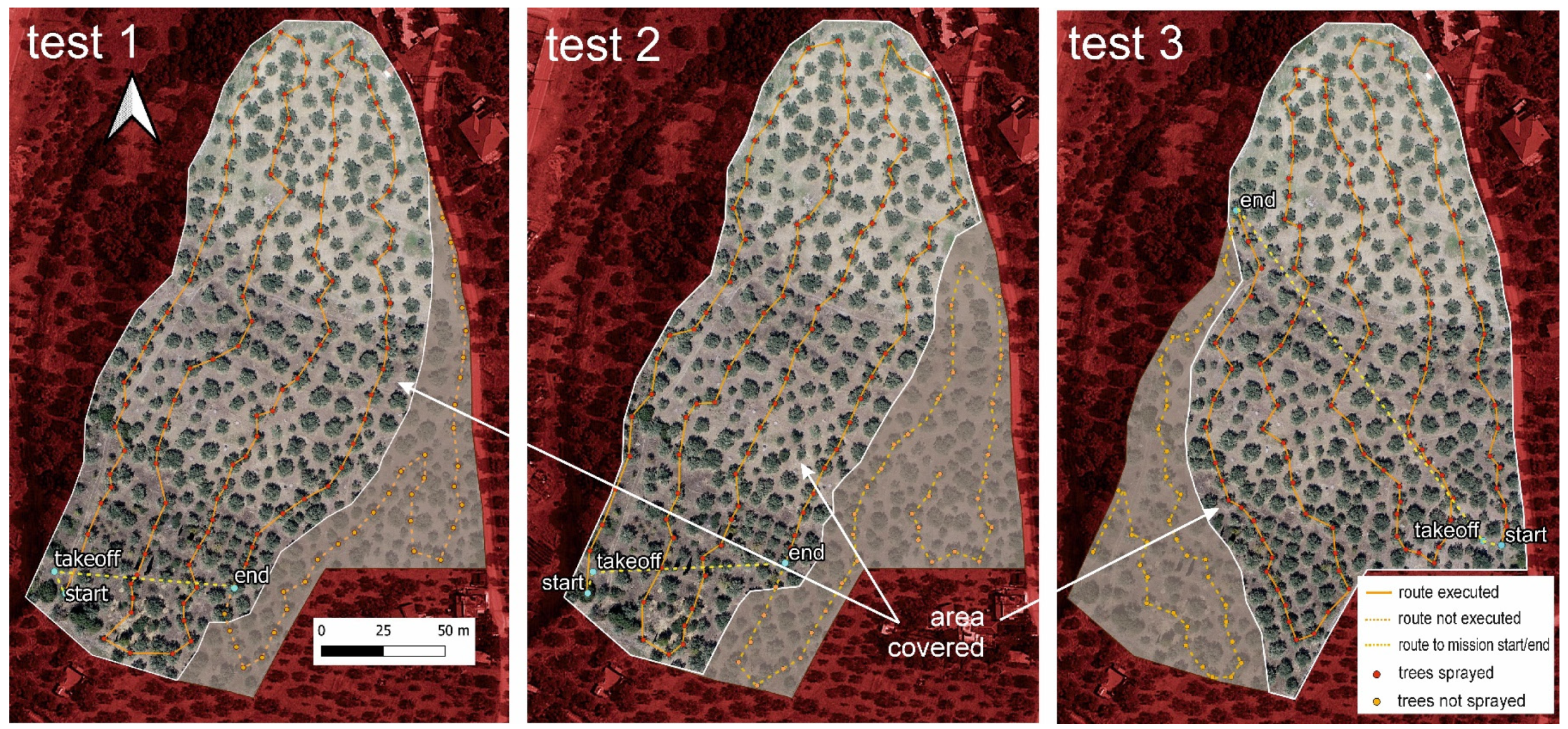
This method was tested on an olive grove of 3.1 ha in the region of Fytoko, Magnesia, Greece (39.40276° N, 22.937504° E). The olive trees were planted in an irregular pattern with an average density of 142 trees per ha. The DJI T16 (DJI Technology Co., Ltd., Shenzhen, China) [18] was used for the field tests (Figure 1c). Detailed characteristics of the UAV are provided in the Supplementary Material (Table S3). The area was previously mapped with a DJI Phantom 4 RTK UAV using a 4K RGB camera (Figure 5). The tree positions were identified, and three study cases of alternative UAV flight paths were designed over the olive grove. The main constraint for the specific spraying application in olive trees is to follow paths that provide targeted spraying on one third of the trees. During the test flights, all the applications were performed using pure water.
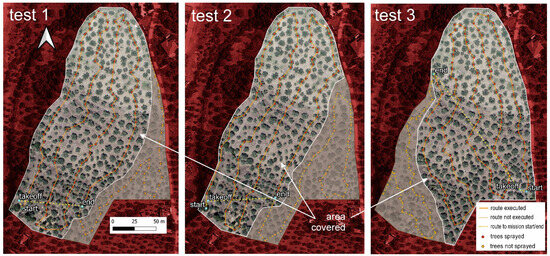
Figure 5.
Field tests with UAV spraying in a 3.1 ha olive grove. Three cases containing alternative UAV flight paths were examined.
The T16 UAV was equipped with eight XR11001VS Teejet nozzles that produce fine droplets in the order of 130–250 μm at a pressure range of 0.2–0.35 MPa. The spray dose was decided at 67 mL per tree. According to the theory suggested by ASABE [19], this dose was estimated to provide similar droplet coverage to a conventional backpack sprayer applying 300 mL per tree with course droplets in the order of 500 μm.
Preliminary tests were conducted to decide the initial volume of water to be placed in the tank. The goal was to synchronize the tank evacuation with the battery endurance. Avoiding carrying an extra weight in the tank that will not be applied during a single sortie may optimize the battery endurance and may conserve time by eliminating the landing and taking-off events. The tests indicated that the optimum volume to be used was 8.1 L, which could be applied over a period of 11.5 to 12.5 min coinciding with the time that battery energy dropped to 20% and needed replacing.
Consequently, tests with three actual spraying missions were performed following alternative paths until the tank become empty and/or the battery needed replacing (Figure 5). The number of sprayed trees in each case was recorded along with other spraying parameters like spray doses, partial times, and area (Supplementary Material Table S4).
A professional workshop for performing UAV spraying on olives would require two persons (a UAV pilot and an assistant), a UAV sprayer with full accessories (batteries, portable power station, peripherals like RTK GPS, water tanks, and other items), and a small truck to carry all the equipment. The workshop is expected to move from place to place when covering a specific area in order to ensure a constant visual line of sight with the UAV and have the take-off and landing points nearby the planned missions to eliminate energy consumption between start and break points.
2.1.4. Hypothetical Common Base Scenario
As the primary data described above were obtained from different regions with alternative characteristics concerning tree density, percentage of trees sprayed, doses applied, etc., a common base scenario was built as a study case to compare the three alternative methods. The tree density for all the cases was considered equal to 150 trees per ha from which one third (50 trees per ha) should be sprayed. The dose per tree for the two traditional methods was taken at 300 mL and for the novel UAV method at 67 mL. The operational area for each case was counted as the area that could be covered by a single workshop within a daily five hour period (also including the time for initial preparation and packing up at the end). The actual data obtained from the real-time monitoring were adapted to the above pre-conditions (i.e., time intervals, walking, and traveling distances). The parameters of the scenario are summarized in Table 1.

Table 1.
Operational parameters for the three study cases in the common base scenario.
2.2. Economic Model
Based on the above study cases, a parameterized computational model was developed for estimating operational costs for each alternative method. The model consisted of three alternative computational paths, one for each study case. Each path included a set of input parameters, a set of intermediate estimations, and a set of output estimates. Some parameters were common among the three paths, and some were unique. The input parameters are categorized as general monetary like interest and inflation, orchard-related parameters like tree density, area, etc., time parameters like available daily time for spraying, duration of spraying, working speed, time for refiling, etc., labor parameters like number of workers, wages, etc., and equipment parameters like purchase prices, economic life, tank capacity, nozzle capacity, battery endurance, etc.
The Input parameters were used to estimate operational costs arising from the following sources (as defined by ASABE) [20,21]: (1) labor, (2) capital spending, (3) repairs and maintenance, (4) energy consumption, (5) licenses, fees, and taxes, (6) storage, and (7) (or the novel UAV method only) cost of preliminary field survey for exact georeferencing of the rural areas and the olive tree positions.
2.2.1. Labor
Backpack sprayer or lance-carrying workers and tractor drivers are usually low trained personnel; therefore, their wages are relatively low. Workshop foremen usually have some expertise in bait sprayer applications and therefore paid rather higher. On the other hand, UAV pilots are skilled and certified personnel who request higher salaries. For the present study, wages for an 8 h occupation of unskilled personnel, like sprayers and drivers, was considered EUR 70, for the foreman EUR 120, for the certified UAV pilots EUR 120 and for their assistants EUR 80. The wages were obtained from the local, traditional spraying workshops and from companies providing UAV spraying services. The wages include all personnel costs (insurance, taxes, etc.). The higher wages for the UAV personnel also encompass the extra costs for special training, pilot licenses, medical certificates, and other items; therefore, these costs were not estimated as a separate category to avoid a double estimation.
2.2.2. Capital Spending
Capital spending refers to the ownership costs and is a concept that encapsules both depreciation costs (fixed costs) of the equipment and also the cost of interest. The equipment involved in study Case I was a set of manual backpack sprayers, a small truck carrying a tank of clear water and the pesticides for the spray mixtures, and occasionally the workers. Study Case II involved a sprayer machine mounted on a tractor and some spray lances. Study Case III required a UAV sprayer, a full set of batteries, a portable power station, an RTK GPS, and a small truck to carry the equipment, the pesticides, and clear water. Even though a set of batteries are required for the UAV to keep it constantly operating, the battery usage cost is independent from the number of batteries because it is expressed on a time basis. Nevertheless, a portable power station is necessary for battery recharging in the field.
All estimations for capital spending are based on a nominal interest of 0.5% and an inflation rate of 1% that were long-term relatively stable global values for the 2010–2020 period. Table 2 indicates purchase prices, theoretical economic life, and remaining value (as % of purchase price). Economic life (theoretical) for tractor-mounted sprayer was taken from the ASABE Standards [21]. The same value was also used for the backpack sprayers due to the absence of specific data and due to the small contribution (just 1.5/1000) of the specific parameter of the total cost. Economic life of the UAV was counted as 4 years because the rapid development of this technology results in a limited shelf-life [10,22,23]. In such cases, it is not the annual use that leads to the depreciation but the technology becoming obsolete. The same applies for the power station that is generally associated with the technology of the UAV batteries but not for the RTK-GPS, which imposes a lower technological risk; therefore, economic life was considered as 10 years [24].
Table 2.
Capital spending parameters of utilized equipment for the three alternative cases.
Some of the equipment, like tractors, trucks, or tractor sprayers, are not supposed to be used solely for olive spraying; on the contrary, their use in spraying may have a limited contribution to the total annual use. To overcome this complex, “hypothetical economic life” in term of years was estimated as the ratio of the theoretical hours of economic life to the hours of actual annual use for olive spraying. Annual depreciation was based on this hypothetical economic life. Capital spending for the equipment encompasses annual depreciation plus the annual interest for the engaged capital. The latter was estimated on a theoretical economic life basis. The remaining value at the end of the economic life of the equipment was considered to be 20% for the UAV and its peripherals (except for the batteries, where it was 0%), 10% for the tractor sprayer, the tractor, and the truck, and 0% for the backpack sprayers. The higher remaining value for the UAV and its peripherals is due to their short economic life providing an opportunity for using them for other purposes, for selling spare parts, or even benefitting from a funded withdrawal.
2.2.3. Repairs and Maintenance
For the cost of repairs and maintenance (R&M) of the tractor and the sprayer, the formula from the ASABE D497.5 standards [20] was used (Table 3).
where Crm is the accumulated cost of repairs and maintenance, Q0 is the purchase price, h the total hours of use, and RF1 and RF2 constants depending on the equipment. For the backpack sprayers, due to the absence of specific parameters, total life R&M costs accounted for 50% of the purchase price. The specific cost could have been considered neglectable as its contribution to the total cost is less than 0.1%. Contrarywise, UAV ownership and consequently UAV R&M costs constitute an important portion of the total cost of the operation. Nevertheless, there is also a lack of specific information for UAVs and their peripherals because the technology is rather new. Some general information indicates that these costs should be considered to be around 50% of the purchase price [23].
Table 3.
Repairs and maintenance costs according to ASABE D497.5 standards [20].
Table 3.
Repairs and maintenance costs according to ASABE D497.5 standards [20].
| RF1 | RF2 | ||
| Sprayers | 0.410 | 0.005 | |
| Tractor | 1.300 | 2.000 |
Repairs often involve a second kind of cost, so-called “soft costs” arising from the loss of the operative ability of the equipment in the case of immobilization due to a failure. In some cases, net income losses from delayed or even lost field work may be even more serious than the cost of the repairs. Ideally, backup equipment should always be available “on the shelf”. This is not a problem for low-cost equipment like the backpack sprayers, nor for the tractor sprayers despite their high price, because usually there are plenty of this equipment to hire in rural areas in case of a serious failure. In the case of a UAV or its peripherals, however, the operating agent should keep adequate backup sets to ensure that the fleet of UAVs is always operatable. The UAV failure rate was verified at about 1/103 flight hours [25]. Considering a one-month immobilization period for the repairment, it is estimated that one extra UAV could serve as a backup for a fleet of 33 UAVs. Nevertheless, it is fairly possible for a company to operate more than five UAVs for olive spraying. Therefore, an extra depreciation cost equal to 1/5 of the normal depreciation cost was considered for the backup UAV. The same applies for its peripherals.
2.2.4. Energy Costs
Energy use originates from fossil fuel consumption (usually diesel) or electricity. Diesel fuel is consumed either by the tractor or truck carrying the equipment or by the tractor assisting the mechanical sprayer, whereas electricity is used by the UAV. Energy consumption was estimated for each of the following functions: transportation (all cases), moving into the field (Cases II and III), and powering the mechanical sprayer (Case II). The performance, traction, slip, and power requirements for the corresponding ground vehicle were estimated according to the ASABE D497.7 Standard [21] for the different terrains (field, country road, concrete). Traction power was converted to equivalent PTO or flywheel power thus allowing the estimation of specific fuel consumption and hence, fuel consumption in liters per hour, which were further converted to liters per ha by adjusting for the time intervals of each function. Considering a price of EUR 1.85 per L for diesel (2022 mid price), the total fuel costs were estimated. In addition, the use of hydraulics and lubricants were estimated according to ASABE D497.7, and their corresponding costs were assessed using an average oil/lubricant price of 4 EUR/L.
The DJI T16 UAV is a hexacopter with a standard take-off weight with full payload being 41 kg and a hovering power at full pay load of 5.20 kW [18]. Therefore, the specific power consumption is estimated at 0.124 kW∙kg−1. With a payload of 8.1 Lt that was estimated optimum for the present application, the UAV has a take-off weight of 34.2 kg and a landing weight with an empty tank of 25.9 kg. Therefore, the mean weight during a single sortie is 30.05 kg and the average power consumption for hovering was 4.21 kW. A further ten percent of the maximum power consumption was also accounted for the function of the electronics (IMU, Wi-Fi, sensors, etc., and also the function of the spraying pump).
To perform 13 sorties per day (Table 1) the UAV would be hovering for 2.48 h. Therefore, daily energy consumption was estimated at 10.15 kWh. This energy is produced by the portable power station, which contains a power plant that runs on diesel. The specific fuel consumption for a 5 kW power plant is about 350 g kWh [26]. A performance coefficient of 90% was also considered for the electrical unit of the power station. The fuel consumed by the truck for carrying the equipment to the fields and moving from one take-off point to another was also accounted.
2.2.5. Licenses, Fees and Taxes
Tractors and trucks must have vehicle insurance covering third party injuries, which was broadly estimated at 2.5/1000 of the purchase price on an annual basis. UAVs must also have insurance that is currently about EUR 600 per year.
2.2.6. Storage
The cost of storage is rather low. In the case of traditional agricultural equipment, the demand for housing is generally limited. UAVs involve hi-tech technology that require controlled conditions in terms of storage temperature, humidity, and safety. According to the ASABE Standards [21], the cost of housing for traditional equipment can be generally considered as 0.75% of the purchase price; for UAVs it was double at 1.5%. For the multipurpose equipment (e.g., tractor, truck, sprayer), the cost of storage was multiplied with the ratio of the time the equipment was used in olive fruit fly bait spraying compared to the total lifetime.
2.2.7. Surveillance and Georeferencing (for the UAV Method Only)
Field surveys and desktop processing are required for obtaining orthorectified and georeferenced material with images from a particular area. The preliminary field survey should be employed with a visual inspection UAV equipped with a simple RGB sensor and assisted by an RTK base station. The raw survey product needs further processing with photogrammetric software to obtain an orthomosaic. Tree recognition may be employed manually or by using AI algorithms. The whole process requires highly skilled personnel and advanced hardware and software facilities. The task does not need to be employed annually but at least every five years to record permanent changes of land use. It may be applied by a third-party servicer. Market prices for such a service range from 15–25 EUR∙ha−1. Although, an average annual price is estimated at 4 EUR∙ha−1.
2.3. Geospatial and Statistical Analysis
The QGIS open-source software (QGIS 3.30 Geographic Information System, QGIS Association. http://www.qgis.org) was used to record all the spatial and temporal information of the alternative spraying methods and estimate the time lapses and performances. The computational model for the economic assessments was built in Microsoft Excel (https://office.microsoft.com/excel). The statistical models for the sensitivity analysis were created in OriginPro 2022 (OriginLab Corporation, Northampton, MA, USA).
3. Results
3.1. Case Comparisons
Table 4 summarizes the cost categories for the three alternative methods. The total cost for traditional spraying with backpack sprayers (Case I) was estimated at 5.24 EUR∙ha−1. The cost of labor was estimated at 4.93 EUR∙ha−1 accounting for 94% of the total. The capital spending and R&M of the backpack sprayers and the tractor were 0.13 EUR∙ha−1 and accounted for 2.6% of the total. The fuel costs for the transporting vehicle were 0.12 EUR∙ha−1, 2.5% of the total, and the least important source was the cost of the insurance estimated at 0.05 EUR∙ha−1.
Table 4.
Summary of costs for the three methods.
For spraying with a tractor and a ground worker handling a lance (Case II), the total cost was estimated at 7.24 EUR∙ha−1. The labor cost was 3.66 EUR∙ha−1, lower than Case I, but there was a much higher cost for capital spending and R&M for the tractor and the sprayer, equal to 2.21 EUR∙ha−1. Fuel consumption was also higher, at a cost of 1.24 EUR∙ha−1. In total, 91.3% of the fuel was consumed in the field and the rest was for transportation. In total, labor accounted for 50.5% of the total costs, capital spending and R&M for 30.5%, and fuel consumption for 17.1%.
The total cost for spraying with the UAV (Case III) was estimated at 10.41 EUR∙ha−1, significantly higher when compared to the two traditional methods. The biggest source of the high cost was the capital spending on the UAV and its peripherals. This was estimated at 4.06 EUR∙ha−1. Along with the costs for R&M, the ownership cost amounted to 5.91 EUR∙ha−1 and accounts for almost 56.9% of the total. The second most important was the cost of labor, accounting for 30.8% of the total. Nevertheless, and despite the higher wages for the skilled UAV operating staff, the labor cost was lower compared to the traditional methods and estimated to be equal to 3.20 EUR∙ha−1. The fourth important source was the cost of licenses and insurance, which was estimated at 0.74 EUR∙ha−1, accounting for 7.1% of the total. The cost of energy was estimated at 0.32 EUR∙ha−1. This cost is associated with the cost of the diesel used in the power station for charging the UAV batteries as well as the cost of the diesel consumed by the vehicle for transportation into the fields. The charging of the batteries was responsible for 90% of the total diesel consumed. Even though field surveillance was considered to be performed every five years, its contribution to the total cost reached 2% and was estimated at 0.20 EUR∙ha−1.
The capital spending costs are analyzed with their components in Table 5. For Case I, the use of the major spraying equipment (backpack sprayers) has a negligible cost. The use of the transporting truck also has a minimal impact costing less than 0.10 EUR∙ha−1. In Case II, the capital spending was 0.87 EUR∙ha−f for the sprayer unit and 0.52 EUR∙ha−f for the tractor. In Case III however, the use of the sprayer unit (UAV) along with its indispensable batteries represents 83% of the total capital spending. The use of the UAV is estimated at 2.22 EUR∙ha−f and the use of the batteries at 1.04 EUR∙ha−f. Additionally, another 0.64 is associated with the use of the peripherals (RTK base station and power station). The use of the truck for carrying the equipment has a negligible impact.
Table 5.
Capital spending costs for the three methods.
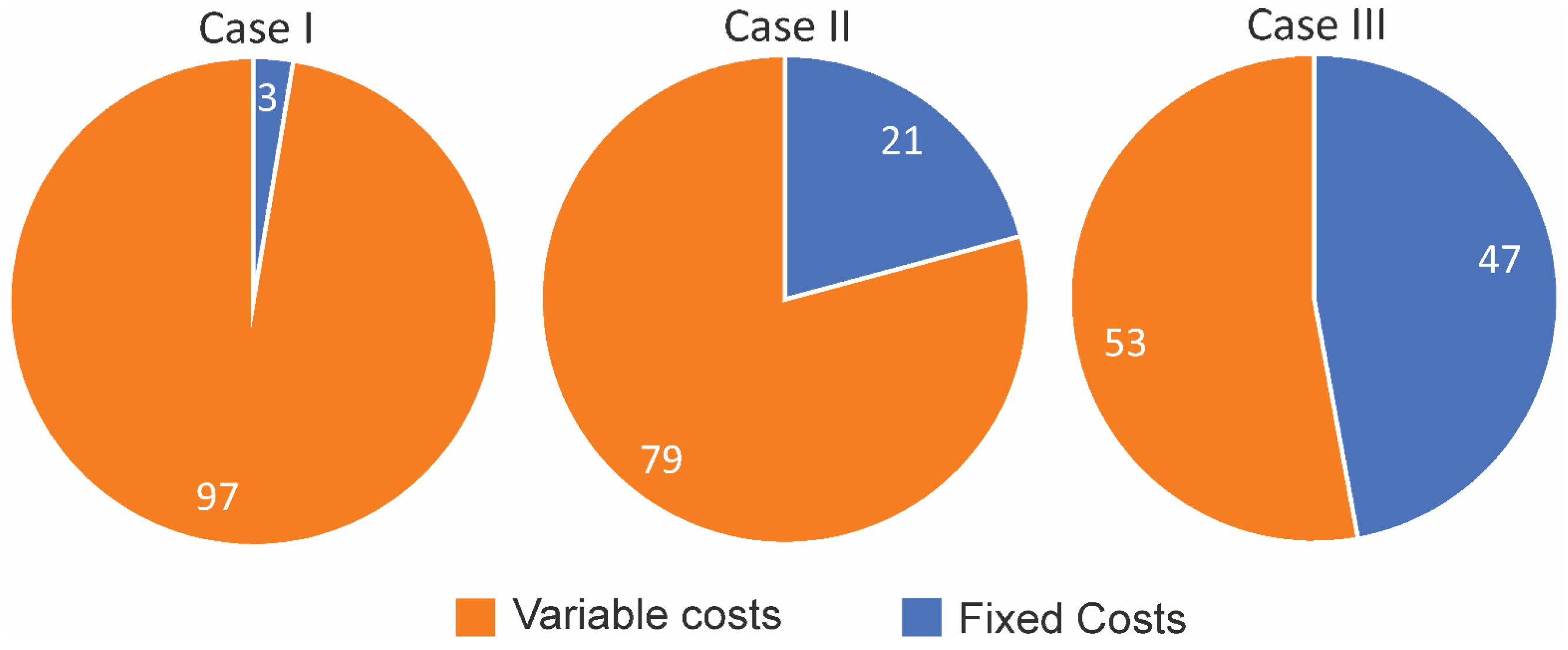
Figure 6 presents the distribution of the variable and fixed costs for the three methods. The variable costs include labor, energy use, and repairs and maintenance. They are accounted for on an hourly basis and occur only when a task is performed. Fixed costs, on the other hand, are accounted for on an annual basis and occur even if an item is not in use. They include capital spending, license, fees and taxes, storage, and field surveillance (only for Case III). Variable costs are considered flexible but fixed costs are rigid. To eliminate the contribution of the fixed costs to the total costs, the annual use of the items should be at its maximum. The present study is based on such a precondition. The analysis indicated that for the traditional method of backpack spraying (Case I), the contribution of the fixed costs was only 3%. In Case II (spraying with a tractor-mounted sprayer and a ground worker), the fixed costs became higher and represented 21% of the total. In the novel UAV method (Case III) however, the fixed costs represented almost half of the total.
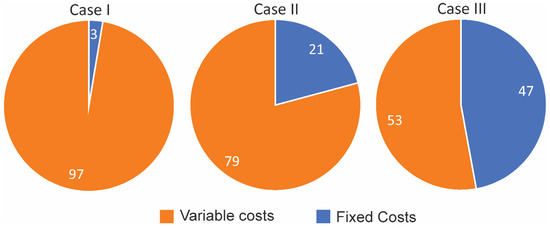
Figure 6.
Variable and fixed costs for the three study cases.
3.2. Sensitivity Analysis for Case III
Based on the model presented in Section 2.2, a sensitivity analysis was performed for a set of critical parameters for the novel UAV method (Case III) to identify potential challenges in order to reduce the operational costs and improve the economic performance. Some parameters, like pilot wages, annual use, spray capacity, droplet size, drift, and backup UAV per operating UAVs, may be at some level, user-defined and therefore considered rather flexible, while others, like the UAV price and remaining value, the UAV economic life, battery prices, battery endurance, failure rate, repair and maintenance costs, and taxes and fees, are more rigid and concern mainly the UAV industry developing more efficient and economic equipment.
Table 6 presents a list of parameters that were subjected to a sensitivity analysis, the corresponding linear models that were exported from the analysis, and the break-even points, which were the value of (x) provides an operational cost (y) equal to the respective cost of traditional Case I (5.24 EUR ha−1) and Case II (7.24 EUR ha−1). Since the (y) values were estimated from the computational model described in Section 2.2, the regression coefficients R2 were over 0.99 for all cases. The pilot wage, UAV price, remaining value, droplet size, amount of drift, price of the batteries, UAV failure rate, the costs for repairs and maintenance, and the taxes and fees, provided a simple linear relation with the UAV operational cost; the annual use, the economic life, the spray capacity, the number of backup UAVs, and the battery endurance and battery recharging cycles introduced a second-degree exponential effect to the cost of operation.
Table 6.
Sensitivity analysis models produced in the study of UAV operational costs (y) in relation to different operational parameters (x) and corresponding break-even points when comparing Cases I and II.
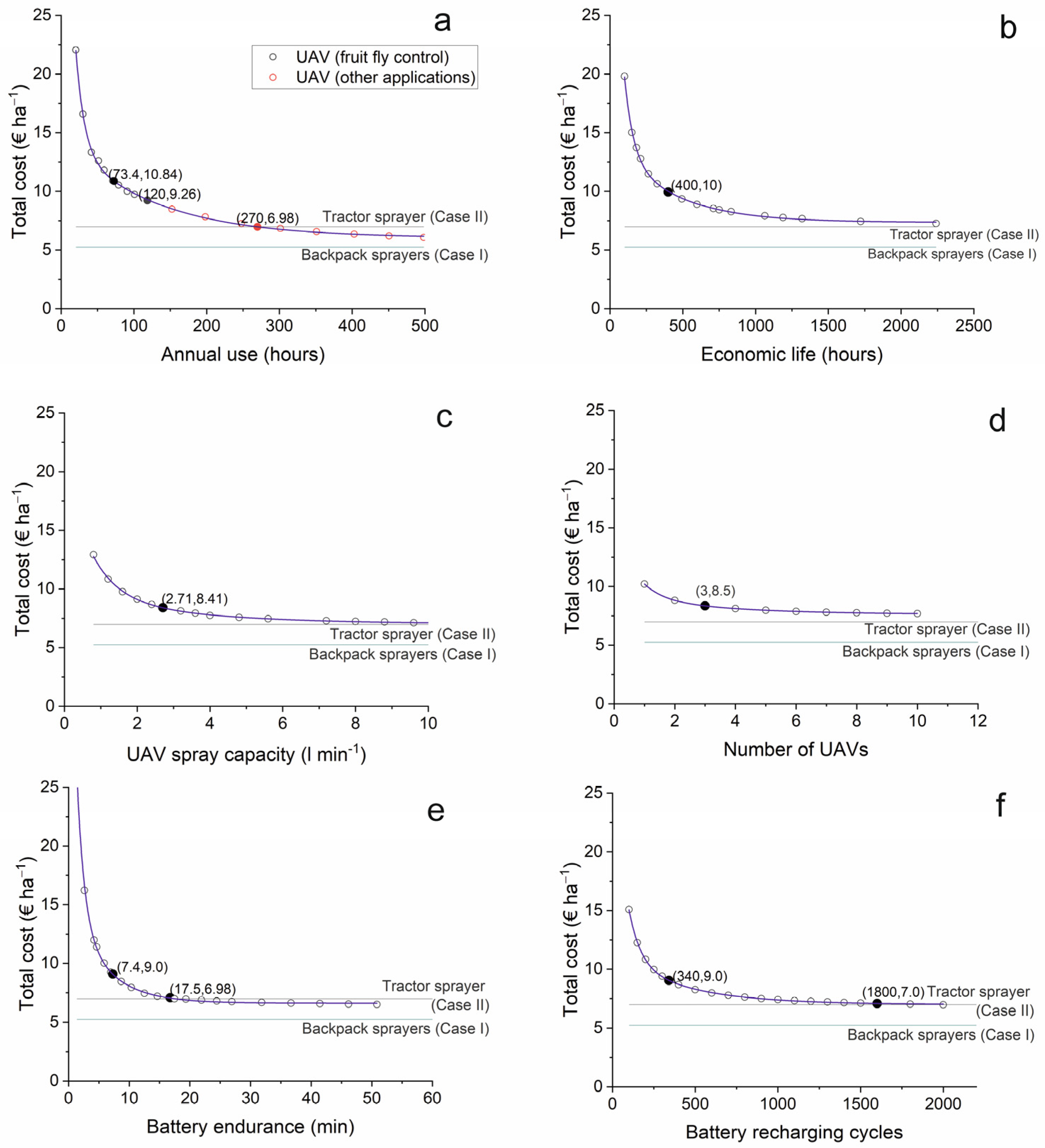
None of the above examined parameters were able to provide a cost lower than the traditional backpack sprayer method (Case I). In some cases, the cost could become compatible with Case II (tractor and ground worker), but the value (x) could reach an extreme value that is not practically applicable. For instance, the UAV purchase price should drop to EUR 590 and, similarly, the price of the UAV batteries should be lower than EUR 360. These prices are far below the current manufacturing costs. A reduction in the droplet size at 53 nm could decrease the necessary volume per tree. Although this would increase the performance, it would considerably raise the risk of drift. For other parameters however, it was possible to address a reasonable value for (x) and reduce the operational cost (y) at a level compatible with Case II. For instance, the annual use could be expanded to 270 h if the UAV was also used for other applications during the year besides olive fruit fly control, which at six applications per year totalled up to 120 h per UAV annually (Table 6 and Figure 7a). It is also quite possible to reach 17.5 min of battery endurance as the current endurance ranges from 10 to 12 min with a full payload (Table 6 and Figure 7e). The 1800 battery recharging cycles are also within a feasible range for using more contemporary LiPo batteries (Table 6 and Figure 7f). Nevertheless, the total cost could remain reasonably low even with 340 recharging cycles (Figure 7f). Since the total cost (y) of the parameters (x) to produce an exponential model rise abruptly with low (x) values, the models were further analyzed to identify the points where the curvature of the exponential model becomes minimal (Figure 7). These points were identified as critical for avoiding an extremely high operational cost in the UAV method.
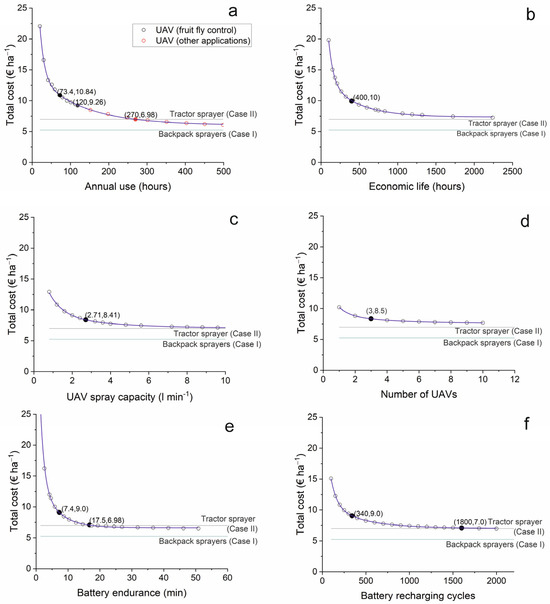
Figure 7.
Graphical sensitivity analysis for the exponential model parameters. Changes of total costs in accordance to annual UAV use (a), UAV economic life (b), UAV spray capacity (c), number of UAVs (d), Battery endurance (e) and Battery recharging cycles (f). Black solid circles indicate the critical points where substantial changes in the curvature model occur. The interval within denotes the acceptable range for the factor X.
For annual use (Figure 7a), the nominal value estimated in the present study for covering one workshop sector during the whole fruit fly control period was 120 h and, as discussed, could be expanded to 270 h by involving the UAV in other applications. But if the annual use falls below 73.4 h, the total cost will start to rise too abruptly, making the method too expensive. Similarly, in Figure 7b, the economic life of the UAV should be at least 400 h to avoid an abrupt increase in the operational cost. The critical value for the UAV total spray capacity is 2.71 L min−1 (Figure 7c, in the current study it was 3.60 L min−1), while at least three UAVs should be operational for each backup UAV (Figure 7d). Concerning the batteries, their endurance need to be greater than 7.4 min (Figure 7e) while providing at least 340 recharging cycles (Figure 7f).
4. Discussion
The findings of the present study reveal some important economic aspects for the use of UAV sprayers in agricultural applications. The study used for comparison two conventional cases of agricultural spraying applications that encompass specific intrinsic difficulties whilst also having a high operational cost. The traditional backpack bait spraying for the olive fruit fly in mountainous and hard to access areas relies mainly on human labor and is therefore expensive. The semi-mechanized method with tractor-mounted sprayers and ground workers also causes a high cost because overall performance is restrained due to the low performance of the ground workers. In that case, the cost was actually proved higher even using the backpack sprayer method because, besides the expensive human labor, it involves additional machinery which come with fixed and variable costs. The results of the economic analysis provided a total cost of 5.24 EUR∙ha−1 for the conventional backpack spraying method and 7.24 EUR∙ha−1 for the semi-mechanized method using a tractor and a ground worker. The respective cost for the novel UAV method was 10.41 EUR∙ha−1, two times higher than that of the first method and almost 1.5 times higher than the second. However, this is subject to change if we consider the efficacy of the operation. The calculations in the present study are based on the assumption that the three use cases have similar efficacy on olive fruit fly control. To our knowledge, there is no such study in the specific operation and crop. Based on related studies in other crops [9,11,27], the UAV spraying of pesticides or other compounds may show higher or lower efficacy. This, in the case of fruit fly control, could possibly affect the applications’ annual cost.
The main source of the high cost in Case III was the capital spending of the UAV and its peripherals, mainly due to the limited economic life of the equipment, which involves cutting-edge technology that is highly subject to technological risks such as functional uncertainty, robustness, integration issues, missing service and support from vendors, and substitution by new emerging technologies [8]. The findings agree with the results in [5], which also reported considerably higher amortization costs for three alternative UAV models compared to traditional sprayer machinery. In [10], the authors developed a low-cost UAV sprayer and assessed the economic impact for bait spraying high density olives; however, the total cost was again 30% higher when compared to traditional spraying. One feasible way to reduce the capital spending cost is to maximize the annual use of the equipment by also involving it in other applications besides fruit fly control. The sensitivity analysis revealed that the equipment should be used at least 73.4 h annually to avoid an abrupt increase in the capital spending. One UAV can be used for the protection of 200–300 ha of olive plantation, recording 95–140 flight hours annually. If the same UAV also becomes involved in other applications, it may reach the 170 h needed, which is the break-even point where the cost of Case III equals the cost of Case II.
Capital spending, along with the cost for repairs and maintenance, the cost of storage, and the cost of insurance, constitute the ownership costs. They comprise about 65% of the total. Storage and insurance were relatively low but the cost of repairs and maintenance was the third most high cost because the airborne mode of the operation entails a high risk of severe or even catastrophic UAV damage during the flight, either from system failure or from a human mistake [25].
Oppositely to what was expected, the cost of human labor was considerably high and the second highest cost for the UAV method. Compared to the traditional Case I, which relies almost entirely on human labor, it was just 35% lower. The performance of a single worker for the traditional workshop with backpack sprayers (including time for breaks, refiling, etc.) was 2.98 ha∙h−1, while the mean performance for a single member of the UAV workshop was 3.91 ha∙h−1. However, the traditional workshop uses uncertified workers with low salaries, while the UAV staff are certified and highly skilled and require high salaries. Moreover, for safety and practical reasons, in Case III, two people must be involved, one experienced and certified UAV pilot and one pilot assistant. The sensitivity analysis revealed that it was not possible to reach the total cost of Case I even if the UAV staff salaries became zero. On the contrary, the cost of the energy for powering the UAV and carrying the equipment with the vehicle was low and almost four times lower compared to the cost of the energy for the tractor in Case II, despite the airborne nature of the UAV operation.
The previous estimations and comparisons were made with a DJI T16 UAV that carries a 16 L tank that was about half-filled to synchronize the tank refilling with the need for battery changes. This means that a smaller and cheaper UAV could have been used for the same work. Prices of commercially available UAV sprayers range considerably depending on the incorporated technology, the quality and reliability of the product, the provider, and many more factors. Presuming a 1/3 lower price for the UAV and its batteries, a minimum of 1800 battery recharging cycles, and an annual UAV use of at least 270 h, the computational model demonstrated that the total cost for bait spraying for olive fruit fly control could drop to 5.30 EUR ha−1, which is lower than the tractor and worker method (6.98 EUR ha−1) and compatible with the cost of backpack spraying (5.24 EUR∙ha−1). On the other hand, the assessments of the present work dismiss the impacts of the accuracy and timeliness of the operations. For instance, the setting up of a prescribed regular pattern mission may guarantee an even and uniform application with a greater efficacy on the control of the insect compared to the irregular patterns that ground-based workshops are able to follow, as proved by the actual data in Figure 3 and Figure 4. Moreover, using a UAV in combination with real-time information from online electronic traps provides the opportunity to perform precision agriculture, with timely applications in particular hot spots. A more efficient application may control the insect population better, reducing the number of the necessary annual bait applications and therefore, the overall cost. Further research is necessary though to qualify and quantify the efficacy on olive fruit fly control when using low volume, UAV-based applications.
5. Conclusions
The use of a UAV based method for controlling the olive fruit fly was more expensive compared to the two traditional methods. The total cost for using a 16 L UAV was estimated at 10.41 EUR∙ha−1. The corresponding cost for a traditional method with a tractor and a ground worker was 7.24 EUR∙ha−1, while the cost for a workshop with backpack sprayers based entirely on human labor was 5.24 EUR∙ha−1. The high cost of the UAV method was associated mainly with the high cost of the capital spending. Contemporary UAV sprayers may not be particularly expensive, considering that they are autonomous vehicles; however, their short economic life, which is up to five years, compresses the amortization period of the investment and, therefore, enormously increases the capital spending. The best way to overcome this drawback is to use the UAV as much as possible during its short economic life. The annual usage for olive fruit fly control was estimated at 95–140 flight hours gathered mainly during the summer period. There is therefore a great opportunity to utilize the UAV in other applications during the rest of the year. The sensitivity analysis performed in the present study revealed that there is a chance of reducing the total operational cost of the UAV method to a compatible level with that of the traditional, tractor and worker method, if a smaller, 10 L UAV was used for at least 170 h annually, operating with batteries that provide at least 1800 recharging cycles. Furthermore, the present study is based on the assumption that all three methods have a similar efficacy and impact on the control of the olive fruit fly. However, based on related studies in other crops, UAV spraying may have a higher or lower efficacy, thus, possibly reducing (or increasing) the number of required annual applications and affecting the annual cost accordingly. Therefore, further research is necessary to address the efficacy of UAV-based sprayer applications for the specific case of olive fruit fly control. Nevertheless, there are currently very few related works. The findings of the present study provide some essential insights into UAV operational parameters and their effects on costs that can be useful for professional UAV-sprayer applications and the developing UAV industry.
Supplementary Materials
The following supporting information can be downloaded at: https://www.mdpi.com/article/10.3390/agriengineering5040118/s1, Table S1: Spraying parameters obtained from two backpack workshops between two consecutive refillings of the sprayers in two regions of Magnesia, Greece; Table S2: Spraying parameters obtained from a workshop operating with a tractor-mounted sprayer and one worker with a lance in the region of Gavriani, Magnesia, Greece; Table S3: DJI T16 specifications; Table S4: Spraying parameters for three alternative UAV flight paths over the same olive grove of 3.1 ha in the region of Fytoko, Magnesia, Greece.
Author Contributions
Conceptualization, C.C.; methodology, C.C., A.C.T. and D.K.; validation, C.C., A.C.T., D.K. and D.B.; formal analysis, C.C.; resources, C.C. and D.B.; writing—original draft preparation, C.C. and A.C.T.; writing—review and editing, C.C., A.C.T., D.K. and D.B.; visualization, C.C. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Data available on demand.
Acknowledgments
The authors would like to acknowledge the contribution of the Directorate of Rural Economy of the regional units of Magnesia and Sporades and its director, Lianos N., for the support in providing field data concerning ground-based sprayer applications used in the calculations of the study.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Anagnostis, A.; Tagarakis, A.C.; Kateris, D.; Moysiadis, V.; Sørensen, C.G.; Pearson, S.; Bochtis, D. Orchard mapping with deep learning semantic segmentation. Sensors 2021, 21, 3813. [Google Scholar] [CrossRef] [PubMed]
- Tagarakis, A.C.; Filippou, E.; Kalaitzidis, D.; Benos, L.; Busato, P.; Bochtis, D. Proposing UGV and UAV Systems for 3D Mapping of Orchard Environments. Sensors 2022, 22, 1571. [Google Scholar] [CrossRef] [PubMed]
- Sylvester, G. (Ed.) E-Agriculture in Action: Drones for Agriculture; Food and Agriculture Organization of the United NationsandInternational Telecommunication Union: Bangkok, Thailand, 2018; ISBN 978-92-5-130246-0s. [Google Scholar]
- SESAR. European Drones Outlook Study; SESAR: Brussels, Belgium, 2016; pp. 1–93. [Google Scholar]
- Morales-Rodríguez, P.A.; Cano, E.C.; Villena, J.; López-Perales, J.A. A Comparison between Conventional Sprayers and New UAV Sprayers: A Study Case of Vineyards and Olives in Extremadura (Spain). Agronomy 2022, 12, 1307. [Google Scholar] [CrossRef]
- Tzanakakis, M.E. Insects and Mites Feeding on Olive: Distribution, Importance, Habits, Seasonal Development, and Dormancy. Insects Mites Feed. Olive 2006, 1. [Google Scholar] [CrossRef]
- Kalaitzaki, A.; Ioannou, A.; Kapogia, E.; Kostas, P. Bait Sprays: Area Wide Control Program against Bactrocera oleae in Greece. Integr. Prot. Olive Crops IOBC-WPRS Bull. 2014, 108, 91–93. [Google Scholar]
- Pontikakos, C.M.; Tsiligiridis, T.A.; Yialouris, C.P.; Kontodimas, D.C. Pest management control of olive fruit fly (Bactrocera oleae) based on a location-aware agro-environmental system. Comput. Electron. Agric. 2012, 87, 39–50. [Google Scholar] [CrossRef]
- Xiao, Q.; Du, R.; Yang, L.; Han, X.; Zhao, S.; Zhang, G.; Fu, W.; Wang, G.; Lan, Y. Comparison of droplet deposition control efficacy on phytophthora capsica and aphids in the processing pepper field of the unmanned aerial vehicle and knapsack sprayer. Agronomy 2020, 10, 215. [Google Scholar] [CrossRef]
- Martinez-Guanter, J.; Agüera, P.; Agüera, J.; Pérez-Ruiz, M. Spray and economics assessment of a UAV-based ultra-low-volume application in olive and citrus orchards. Precis. Agric. 2020, 21, 226–243. [Google Scholar] [CrossRef]
- Wang, G.; Lan, Y.; Yuan, H.; Qi, H.; Chen, P.; Ouyang, F.; Han, Y. Comparison of spray deposition, control efficacy on wheat aphids and working efficiency in the wheat field of the unmanned aerial vehicle with boom sprayer and two conventional knapsack sprayers. Appl. Sci. 2019, 9, 218. [Google Scholar] [CrossRef]
- Dengeru, Y.; Ramasamy, K.; Allimuthu, S.; Balakrishnan, S.; Kumar, A.P.M.; Kannan, B.; Karuppasami, K.M. Study on Spray Deposition and Drift Characteristics of UAV Agricultural Sprayer for Application of Insecticide in Redgram Crop (Cajanus cajan L. Millsp.). Agronomy 2022, 12, 3196. [Google Scholar] [CrossRef]
- Dou, Z.; Fang, Z.; Han, X.; Liu, Y.; Duan, L.; Zeeshan, M.; Arshad, M. Comparison of the Effects of Chemical Topping Agent Sprayed by a UAV and a Boom Sprayer on Cotton Growth. Agronomy 2022, 12, 1625. [Google Scholar] [CrossRef]
- Arakawa, T.; Kamio, S. Control Efficacy of UAV-Based Ultra-Low-Volume Application of Pesticide in Chestnut Orchards. Plants 2023, 12, 2597. [Google Scholar] [CrossRef] [PubMed]
- Hanif, A.S.; Han, X.; Yu, S.H. Independent Control Spraying System for UAV-Based Precise Variable Sprayer: A Review. Drones 2022, 6, 383. [Google Scholar] [CrossRef]
- Cavalaris, C. Chapter 10—Energy efficiency for in-farm unmanned aerial system applications. In Unmanned Aerial Systems in Agriculture; Bochtis, D., Tagarakis, A.C., Kateris, D., Eds.; Academic Press: Cambridge, MA, USA, 2023; pp. 231–244. ISBN 978-0-323-91940-1. [Google Scholar]
- Gertsis, A.; Karampekos, L. Evaluation of Spray Coverage and Other Spraying Characteristics from Ground and Aerial Sprayers (Drones: UAVs) Used in a High-Density Planting Olive Grove in Greece. In Information and Communication Technologies for Agriculture—Theme IV: Actions; Bochtis, D.D., Pearson, S., Lampridi, M., Marinoudi, V., Pardalos, P.M., Eds.; Springer International Publishing: Cham, Switzerland, 2021; pp. 255–268. ISBN 978-3-030-84156-0. [Google Scholar]
- DJI Agras T16 User manual V 1.4. Available online: https://dl.djicdn.com/downloads/t16/20200520/T16_User_Manual_v1.4_EN.pdf (accessed on 23 September 2023).
- Srivastava, A.K.; Goering, C.E.; Rohrbach, R.P.; Buckmaster, D.R. (Eds.) Chemical application. In Engineering Principles of Agricultural Machines; ASABE: Michigan, MI, USA, 2006; pp. 269–322. ISBN 1-892769-50-6. [Google Scholar]
- Agricultural Machinery Management EP496.3. In ASABE Standards; American Society of Agricultural and Biological Engineers: Michigan, MI, USA, 2009.
- Agricultural Machinery Management Data. D497.5. In ASABE Standards; American Society of Agricultural and Biological Engineers: Michigan, MI, USA, 2009.
- Borgogno Mondino, E.; Gajetti, M. Preliminary considerations about costs and potential market of remote sensing from UAV in the Italian viticulture context. Eur. J. Remote Sens. 2017, 50, 310–319. [Google Scholar] [CrossRef]
- Drones: Total Cost of Ownwrship (TCO). Available online: https://www.auav.com.au/articles/drones-total-cost-ownership-tco/ (accessed on 23 September 2023).
- Pedersen, S.M.; Medici, M.; Anken, T.; Tohidloo, G.; Pedersen, M.F.; Carli, G.; Canavari, M.; Tsiropoulos, Z.; Fountas, S. Financial and Environmental Performance of Integrated Precision Farming Systems. In Proceedings of the Precision Agriculture’19; Stafford, J.V., Ed.; Wageningen Academic Publishers: Wageningen, The Netherlands, 2019; pp. 833–839. [Google Scholar]
- Petritoli, E.; Leccese, F.; Ciani, L.; Roma, S.; Navale, V. Reliability and Maintenance Analysis of Unmanned Aerial Vehicles. Sensors 2018, 18, 3171. [Google Scholar] [CrossRef] [PubMed]
- Rigotte, M.R.; Secco, D.; Rosa, H.A.; de Souza, S.N.M.; Santos, R.F.; Gurgacz, F.; da Silva, T.R.B. Energy efficiency of engine-generator set using biofuels under varied loads. Renew. Sustain. Energy Rev. 2017, 79, 520–524. [Google Scholar] [CrossRef]
- Cavalaris, C.; Karamoutis, C.; Markinos, A. Efficacy of cotton harvest aids applications with unmanned aerial vehicles (UAV) and ground-based field sprayers—A case study comparison. Smart Agric. Technol. 2022, 2, 100047. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).