
Variable-Rate Irrigation in Diversified Vegetable Crops: System Development and Evaluation

 , and
, and
Abstract
:1. Introduction
2. Materials and Methods
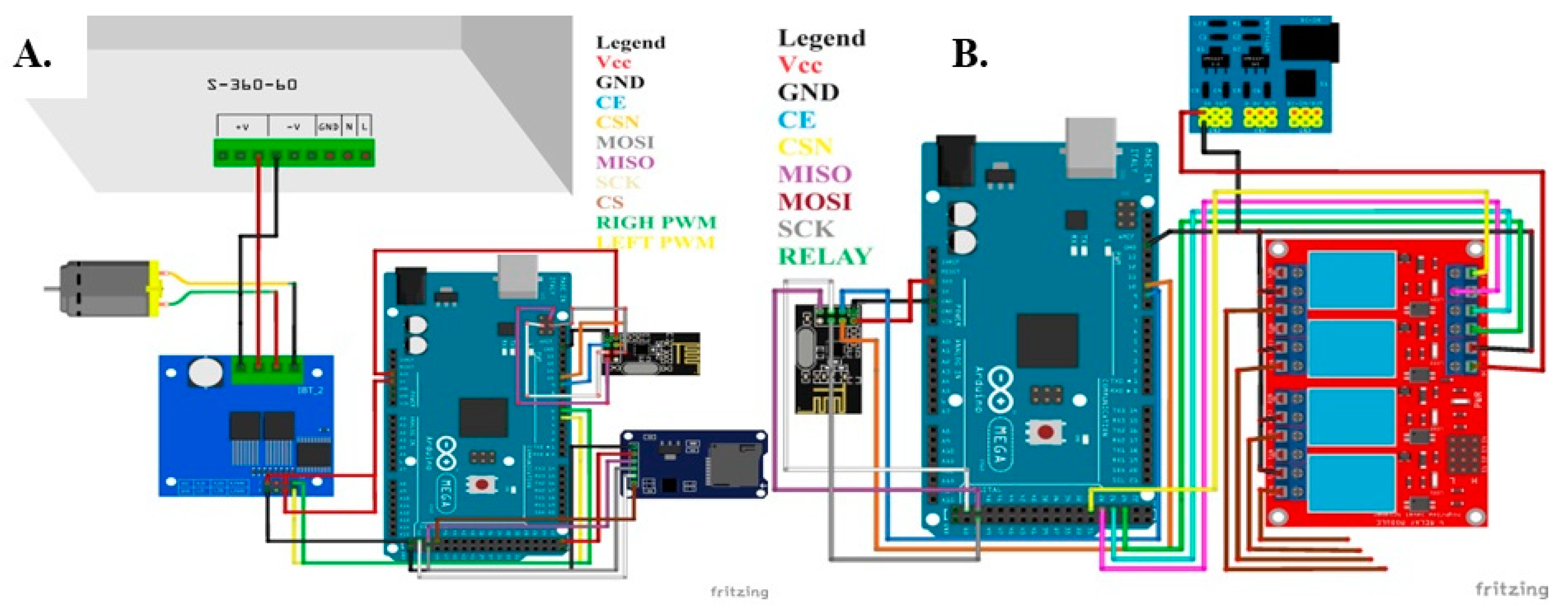
2.1. Electronic Control System for the Irrigation System
2.2. Hydraulic Characterization of the Drip Line
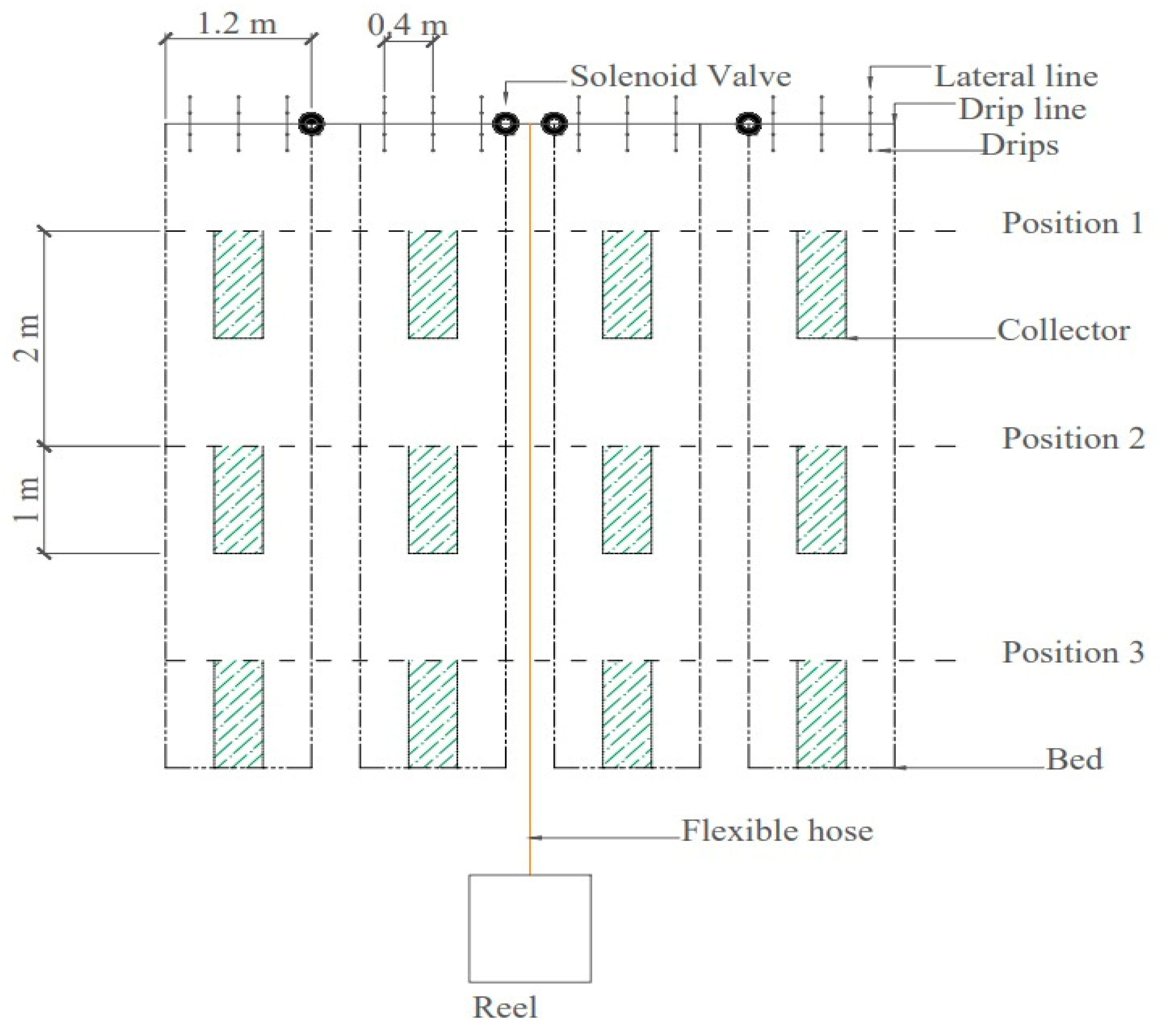
2.3. Performance Evaluation of the Drip Line
2.4. Potential Irrigable Area
3. Results
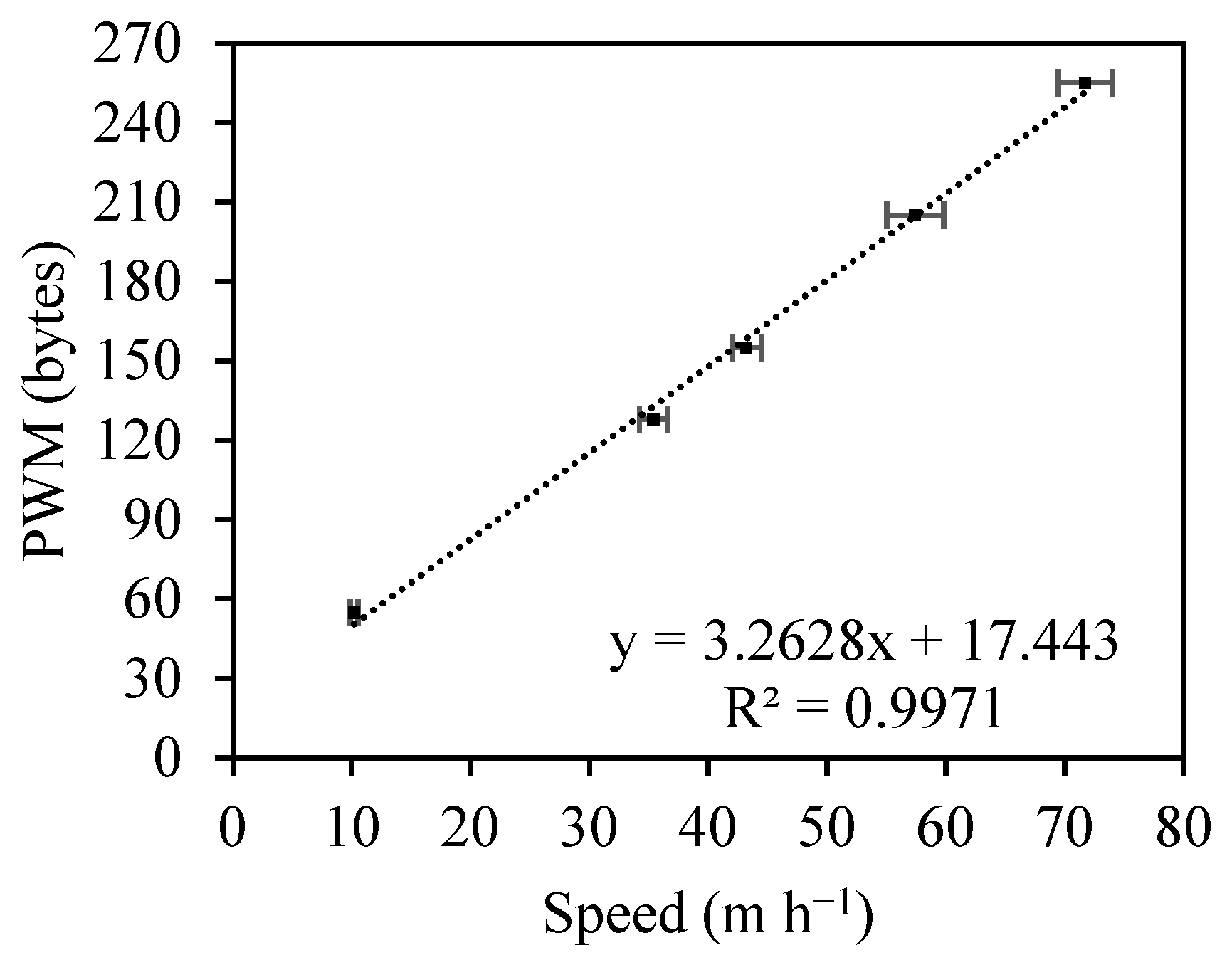
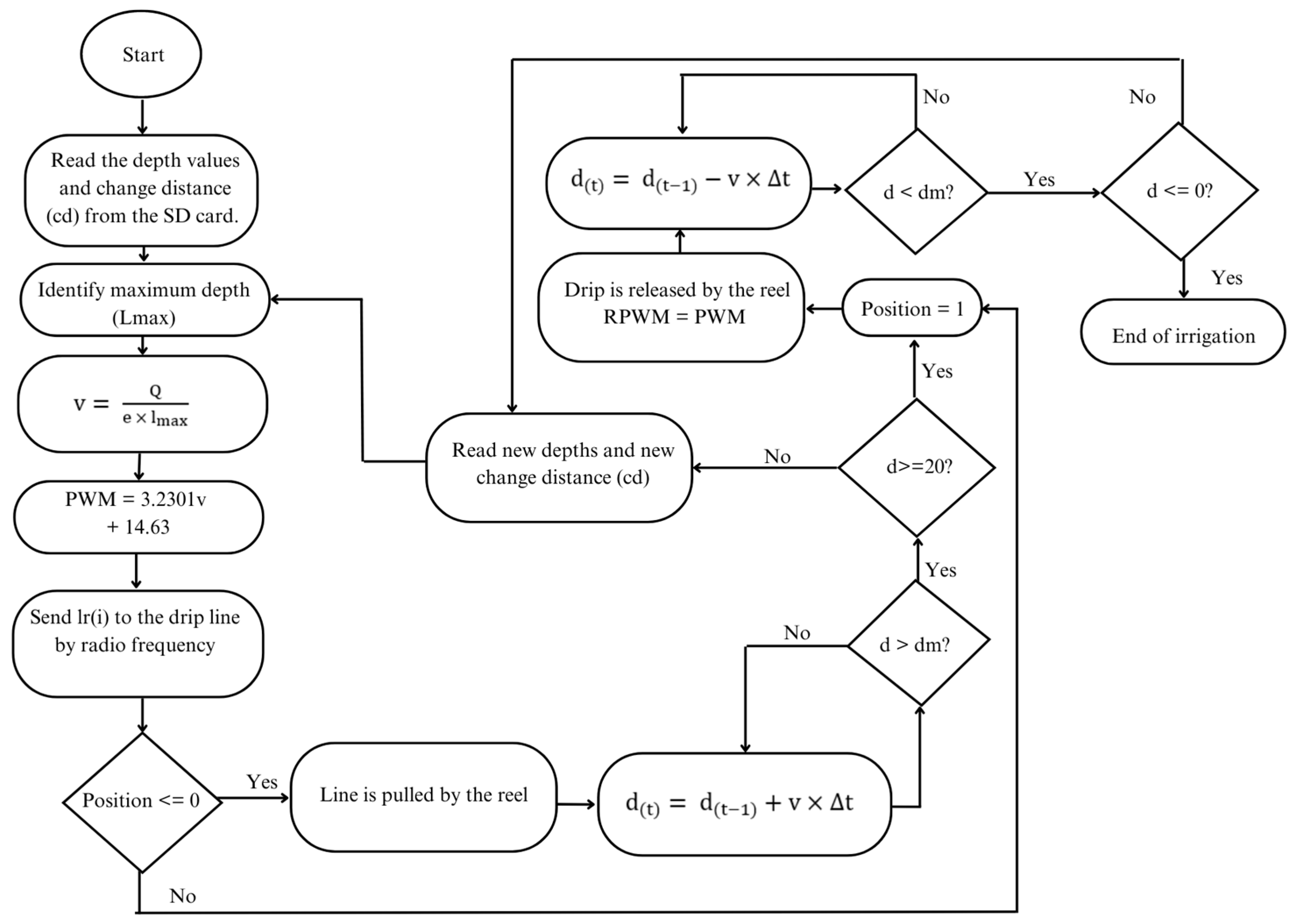
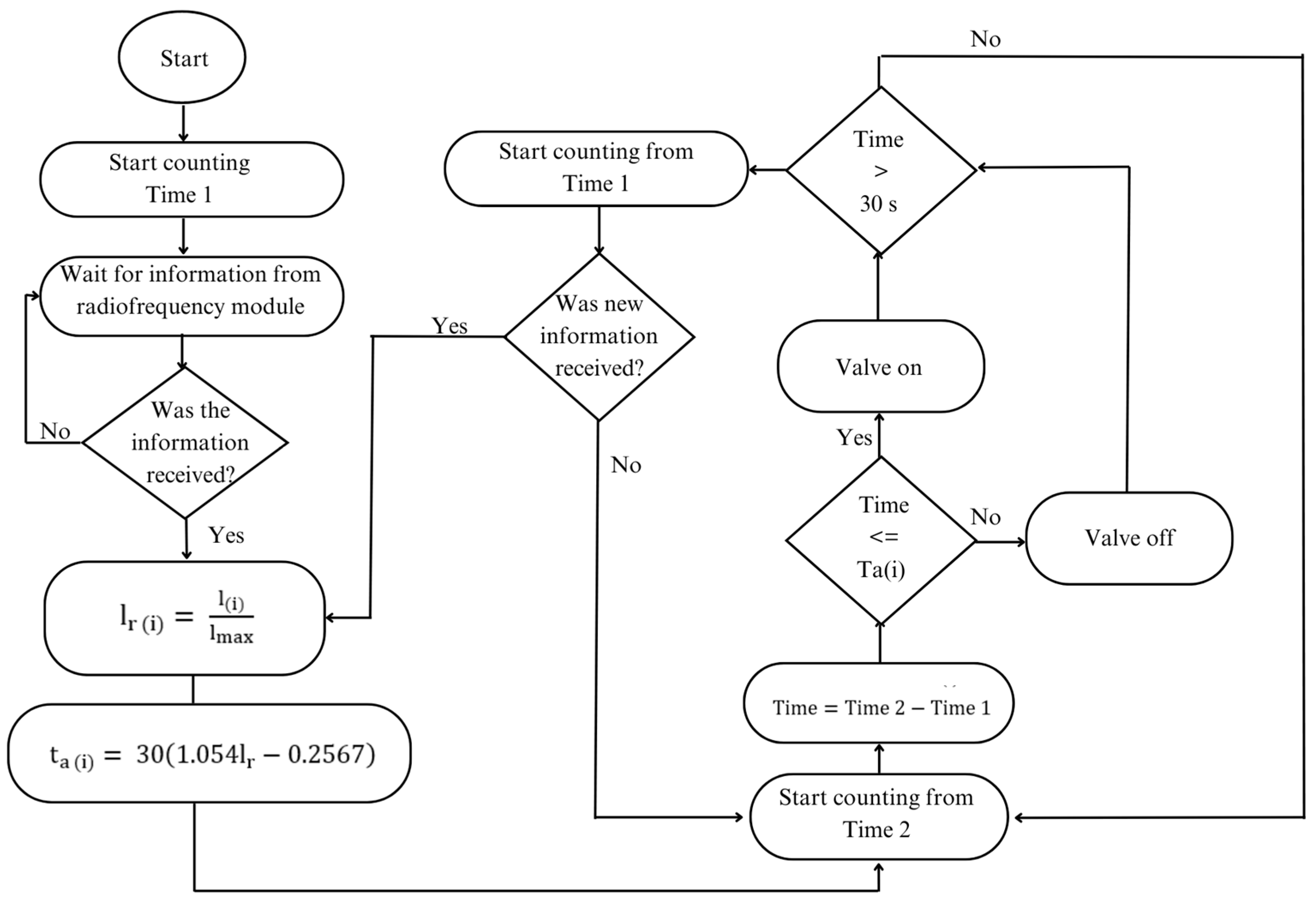
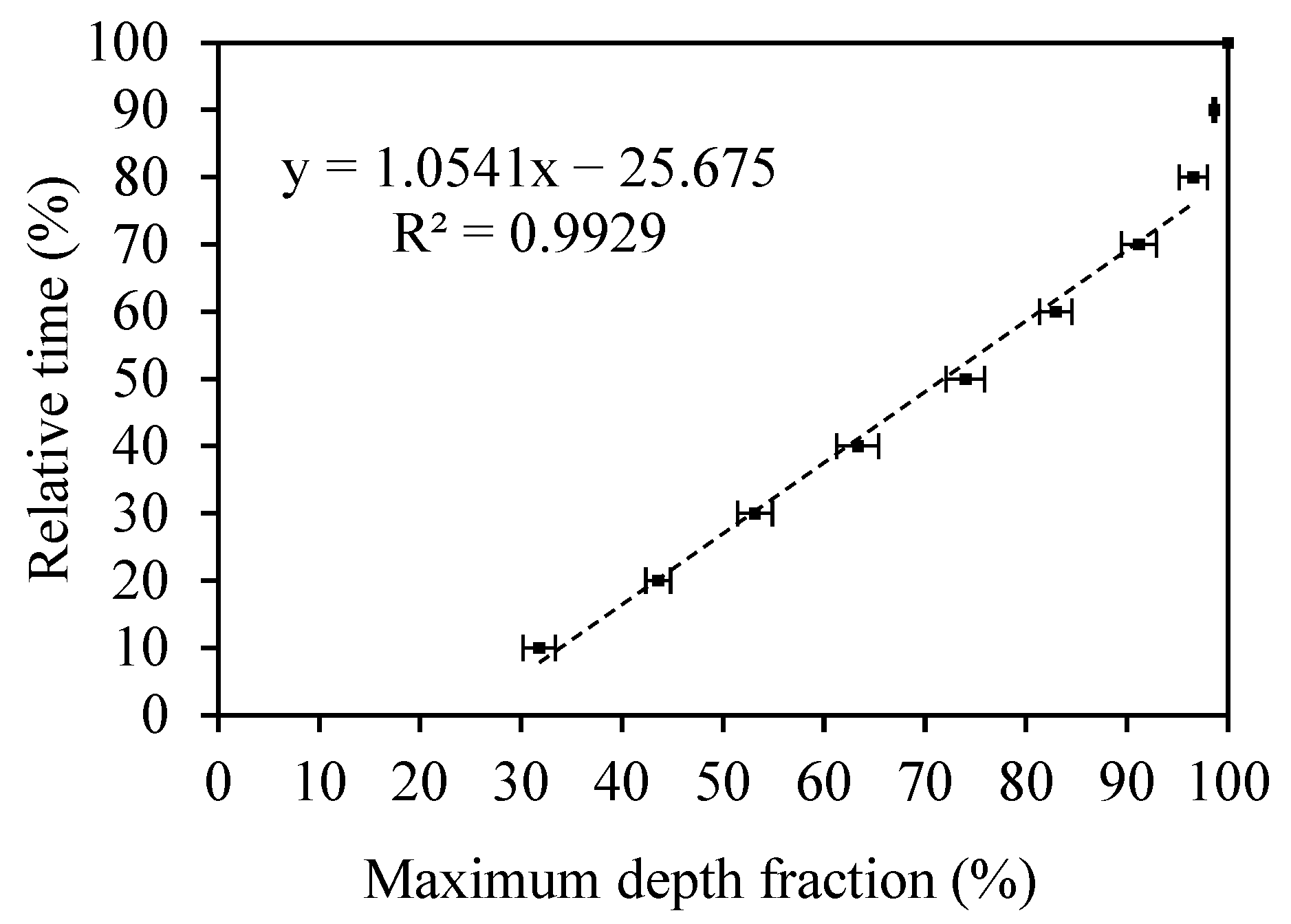
3.1. Control of the Applied Depth through Pulse Activation
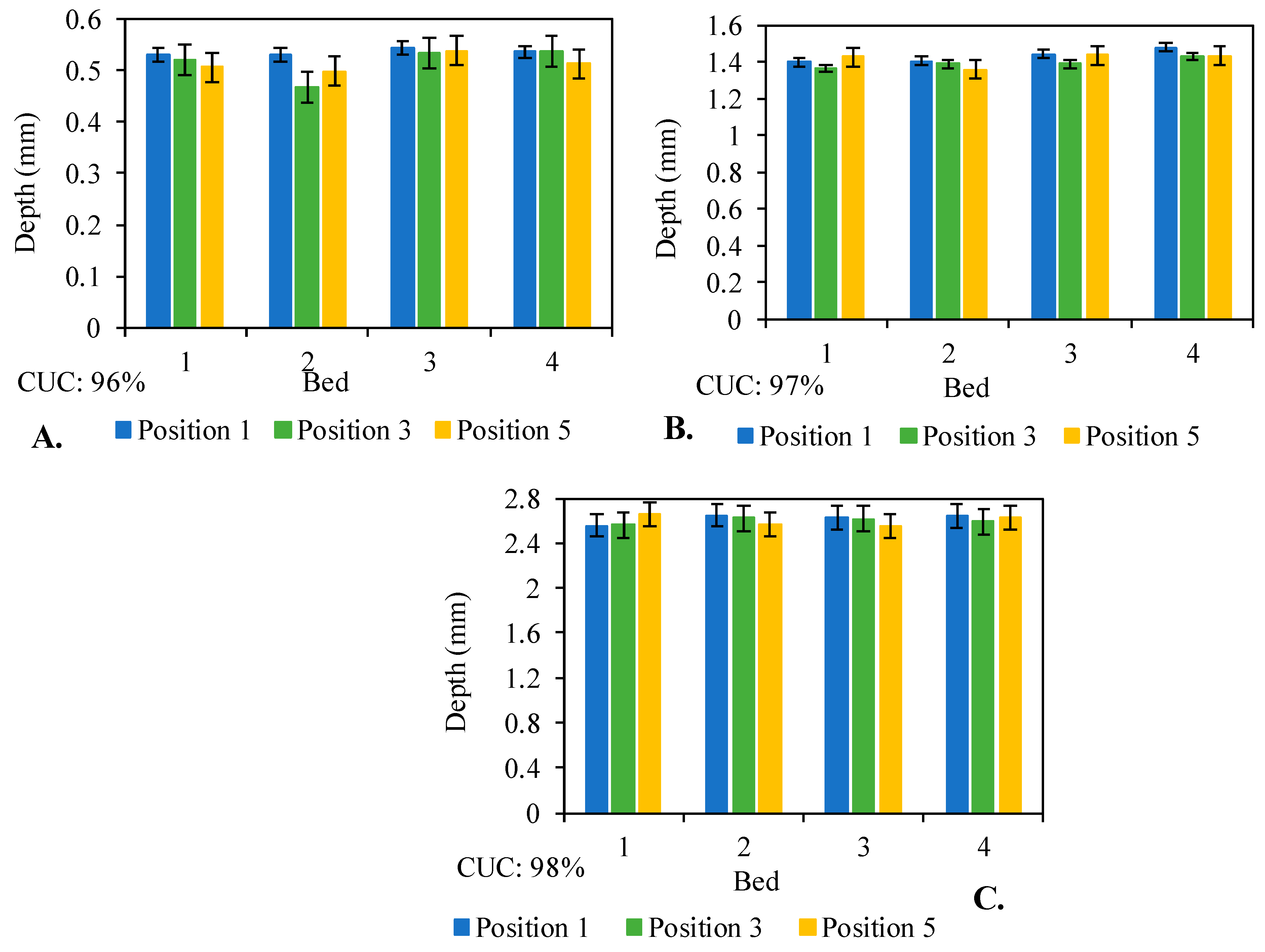
3.2. Performance Evaluation of the Drip Line under a Constant Rate
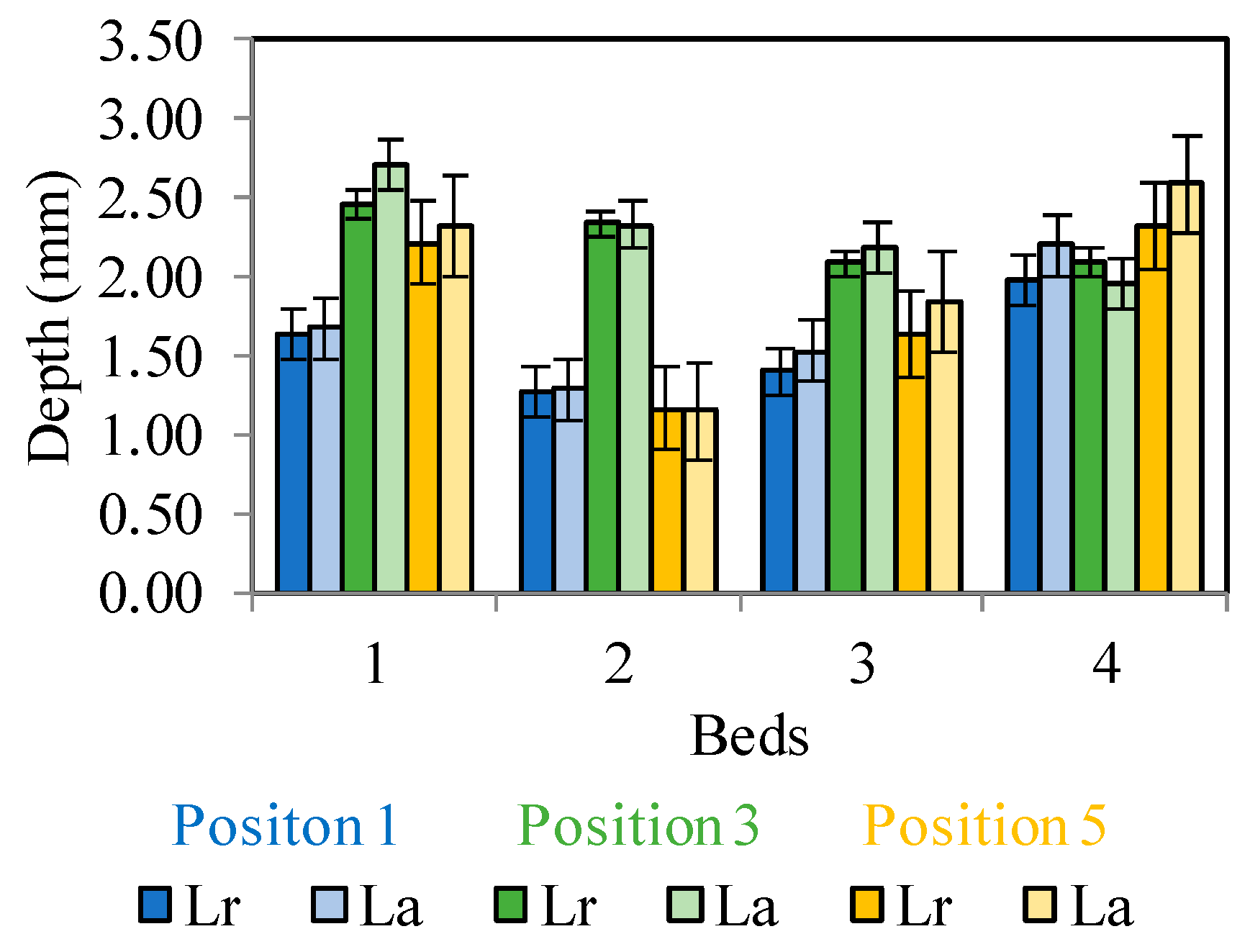
3.3. Performance Evaluation of the Drip Line under a Variable Rate
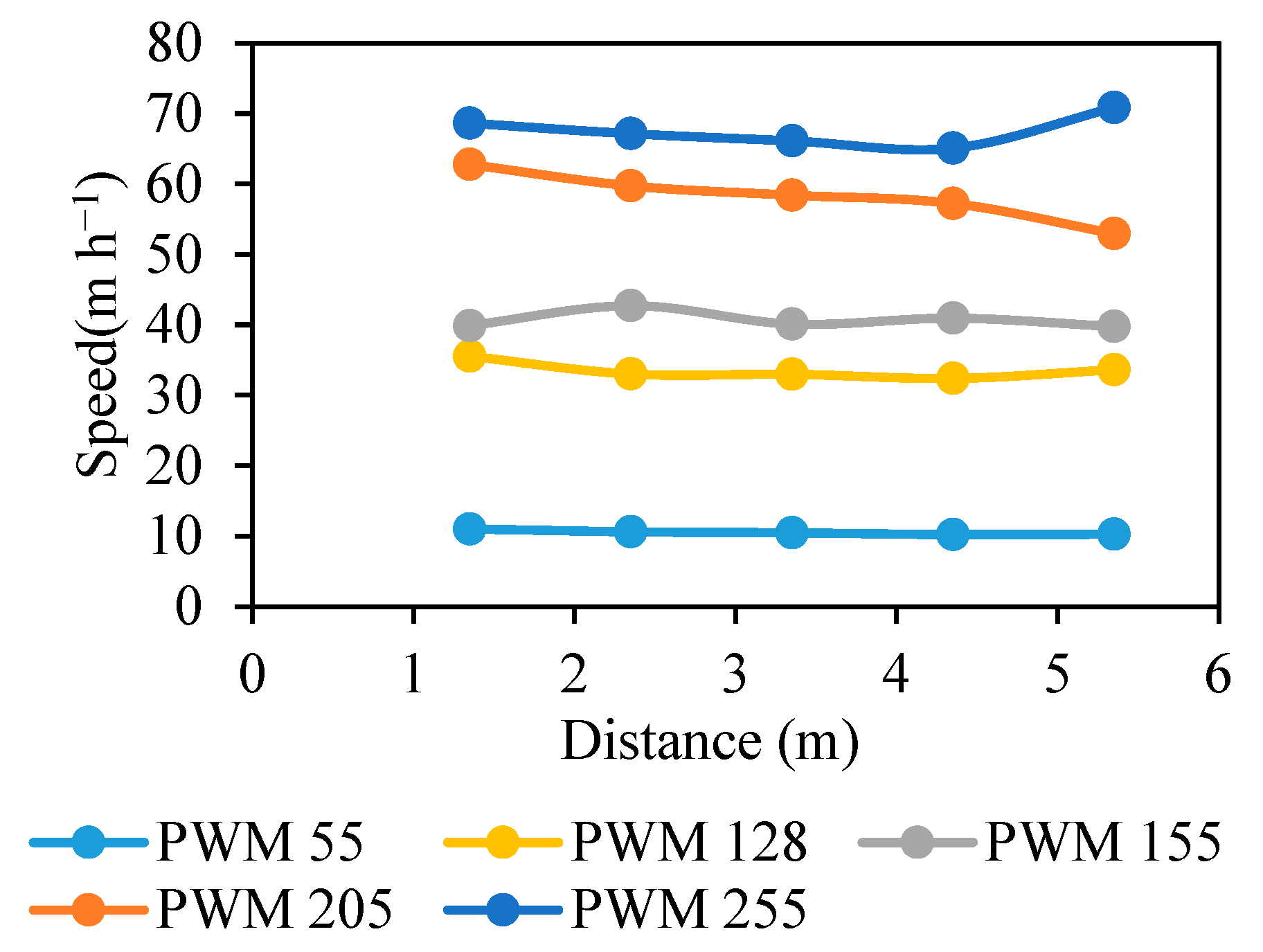
3.4. Evaluation of Variation in Displacement Speed and Pressure Loss in the Flexible Hose of the Drip Line
4. Discussion
4.1. Control of the Applied Depth through Pulse Activation
4.2. Performance Evaluation of the Drip Line under a Constant Rate
4.3. Performance Evaluation of the Drip Line under a Variable Rate
4.4. Evaluation of Variation in Displacement Speed and Pressure Loss in the Flexible Hose of the Drip Line
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Xian, Y.; Cai, G.Y.; Lin, J.; Chen, Y.; Wang, X.L. Comparison of crop productivity, economic benefit and environmental footprints among diversified multi-cropping systems in South China. Sci. Total Environ. 2023, 874, 162–407. [Google Scholar] [CrossRef] [PubMed]
- Kumari, V.V.; Balloli, S.S.; Kumar, M.; Ramana, D.B.V.; Prabhakar, M.; Osman, M.; Indorian, A.K.; Manjunath, M.; Maruthi, V.; Chary, G.R.; et al. Diversified cropping systems for reducing soil erosion and nutrient loss and for increasing crop productivity and profitability in rainfed environments. Agric. Syst. 2024, 217, 103–919. [Google Scholar] [CrossRef]
- Hernández-Guzmán, V.M.; Silva-Ortigoza, R.; Muñoz-Carrillo, D. Velocity control of a brushed DC-motor driven by a DC to DC buck power converter. Int. J. Innov. Comput. Inf. Control 2015, 11, 509–521. [Google Scholar]
- Burbano-Figueroa, O.; Sierra-Monroy, A.; David-Hinestroza, A.; Whitney, C.; Borgemeister, C.; Luedeling, E. Farm-planning under risk: An application of decision analysis and portfolio theory for the assessment of crop diversification strategies in horticultural systems. Agric. Syst. 2022, 199, 103–409. [Google Scholar] [CrossRef]
- Wu, J.; Wang, J.; Hui, W.; Zhao, F.; Wang, P.; Su, C.; Gong, W. Physiology of Plant Responses to Water Stress and Related Genes: A Review. Forests 2022, 13, 324. [Google Scholar] [CrossRef]
- Komarek, A.M.; De Pinto, A.; Smith, V.H. A review of types of risks in agriculture: What we know and what we need to know. Agric. Syst. 2020, 178, 102738. [Google Scholar] [CrossRef]
- Medici, L.O.; Reinert, F.; Carvalho, D.F.; Kozak, M.; Azevedo, R.A. What about keeping plants well watered? Environ. Exp. Bot. 2014, 99, 38–42. [Google Scholar] [CrossRef]
- Wu, P.; Wang, Y.; Li, Y.; Yu, H.; Shao, J.; Zhao, Z.; Qiao, Y.; Liu, C.; Liu, S.; Gao, C.; et al. Optimizing irrigation strategies for sustainable crop productivity and reduced groundwater consumption in a winter wheat-maize rotation system. J. Environ. Manag. 2023, 348, 119469. [Google Scholar] [CrossRef]
- Ben-Gal, A.; Cohen, Y.; Peeters, A.; Naor, A.; Nezer, Y.; Ohana-Levi, N.; Bahat, I.; Katz, L.; Shaked, B.; Linker, R.; et al. Precision drip irrigation for horticulture. Acta Hortic. 2022, 1335, 267–274. [Google Scholar] [CrossRef]
- Lopes, P.R.; Rezende, A.P.C.; Crespi, D.; Galata, R.F.; Silva, F.X.; Cruz, M.S.S.; Santos, J.D.; Kageyama, P.Y. Principles and tools for designing and managing agroecological gardens: Experiences from the agroecological settlements project in southern Bahia. Retrato Assentamentos 2016, 19, 175–207. [Google Scholar]
- De Lara, A.; Khosla, R.; Longchamps, L. Characterizing Spatial Variability in Soil Water Content for Precision Irrigation Management. Agronomy 2018, 8, 59. [Google Scholar] [CrossRef]
- Cahn, M.D.; Johnson, L.F. New approaches to irrigation scheduling of vegetables. Horticulturae 2017, 32, 28. [Google Scholar] [CrossRef]
- Kamyshova, G.; Osipov, A.; Gataullin, S.; Korchagin, S.; Ignar, S.; Gataullin, T.; Terekhova, N.; Suvorov, S. Artificial Neural Networks and Computer Vision’s-Based Phytoindication Systems for Variable Rate Irrigation Improving. IEEE Access 2022, 10, 8577–8589. [Google Scholar] [CrossRef]
- Li, X.; Zhao, W.; Li, J.; Li, Y. Effects of irrigation strategies and soil properties on the characteristics of deep percolation and crop water requirements for a variable rate irrigation system. Agric. Water Manag. 2021, 257, 107–143. [Google Scholar] [CrossRef]
- Sharma, V.; Irmak, S. Economic comparisons of variable rate irrigation and fertigation with fixed (uniform) rate irrigation and fertigation and pre-plant fertilizer management for maize in three soils. Agric. Water Manag. 2020, 240, 106–307. [Google Scholar] [CrossRef]
- Valença, D.C.; Carvalho, D.F.; Reinert, F.; Azevedo, R.A.; Pinho, C.F.; Medici, L.M. Automatically controlled deficit irrigation of lettuce in “organic potponics”. Sci. Agric. 2018, 75, 52–59. [Google Scholar] [CrossRef]
- Cunha, K.C.B.; Rocha, R.V. Automation in the irrigation process in family farming with Arduino platform. Rev. Eletrônica Competências Digit. Para Agric. Fam. 2015, 1, 62–74. [Google Scholar]
- Alvarenga, A.C.; Ferreira, V.H.; Fortes, M.Z. Photovoltaic solar energy: An application in family farming irrigation. Sinergia 2014, 15, 311–318. [Google Scholar]
- Silva, L.O. Agroecomic Performance of a Diversified Organic Vegetable Cultivation Module with a Focus on Nitrogen Balance. Master’s Thesis, Federal Rural University of Rio de Janeiro, Seropédica, RJ, Brazil, 2019; 64p. [Google Scholar]
- Frizzone, J.A.; Freitas, P.S.L.; Rezende, R.; Faria, M.A. Microirrigation: Drip and Microsprinkler Systems, 1st ed.; Maringá: Eduem, Brasil, 2012; 356p, ISBN 978-85-7628-460-4. [Google Scholar]
- Camp, C.R.; Sadler, E.J.; Busscher, W.J. A Comparison of Uniformity Measures for Drip Irrigation Systems. Trans. ASAE 1997, 40, 1013–1020. [Google Scholar] [CrossRef]
- Merriam, J.L.; Keller, J. Farm Irrigation System Evaluation: A Guide for Management; Agricultural Irrigation Engineering Department: Logan, UT, USA, 1978. [Google Scholar]
- Tarjuelo, J.M.; Montero, J.; Honrubia, F.T.; Ortiz, J.J.; Ortega, J.F. Analysis of uniformity of sprinkle irrigation in a semi-arid area. Agric. Water Manag. 1999, 40, 315–331. [Google Scholar] [CrossRef]
- Sui, R.; Yan, H. Field study of variable rate irrigation management in humid climates. Irrig. Drain. 2017, 66, 327–339. [Google Scholar] [CrossRef]
- Hedley, C.B.; Yule, I.J.; Tuohy, M.P.; Vogeler, I. Key Performance Indicators for Simulated Variable-Rate Irrigation of Variable Soils in Humid Regions. Trans ASABE 2009, 52, 1575–1584. [Google Scholar] [CrossRef]
- Schi, X.; Han, W.; Zhao, T.; Tang, J. Decision support system for variable rate irrigation based on UAV multispectral remote sensing. Sensors 2019, 19, 2880. [Google Scholar] [CrossRef] [PubMed]
- Oliveira, H.F.E.; Colombo, A.; Faria, L.C.; Prado, G. Effects of wind speed and direction on the uniformity of water application in self-propelled systems. Eng. Agrícola 2012, 32, 669–678. [Google Scholar] [CrossRef]
- Chen, X.; Wei, Z.; Wei, C.; He, K. Effect of compensation chamber structure on the hydraulic performance of pressure compensating drip emitters. Biosyst. Eng. 2021, 214, 107–121. [Google Scholar] [CrossRef]
- Peters, R.T.; Desta, K.; Nelson, L. Practical Use of Soil Moisture Sensors Their Data for Irrigation Scheduling Washington State University Extension Fact Sheet, F.S.0.8.3.E. 2013. Available online: https://cru.cahe.wsu.edu/CEPublications/FS083E/FS083E.pdf (accessed on 21 August 2024).
- Santos, M.V.M. Hydraulic Characterization of Reel Irrigators during Their Movement. Ph.D. Dissertation, Federal University of Lavras, Lavras, MG, Brazil, 2010; 106p. [Google Scholar]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Position | Bed 1 | Bed 2 | Bed 3 | Bed 4 | ||||
|---|---|---|---|---|---|---|---|---|
| Culture | ETc | Culture | ETc | Culture | ETc | Culture | ETc | |
| 1 | Carrots (I) | 3.26 | Lettuce (I) | 3.26 | Cucumbers (I) | 2.79 | Radishes (I) | 3.26 |
| 2 | Carrots (III) | 4.89 | Lettuce (III) | 4.66 | Cucumbers (III) | 4.66 | Radishes (III) | 4.19 |
| 3 | Carrots (IV) | 4.42 | Beans (I) | 2.33 | Chicory (I) | 3.26 | Malabar spinach (IV) | 4.63 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Magalhães, T.O.P.; Pinto, M.F.; Oliveira, M.V.M.d.; Carvalho, D.F.d. Variable-Rate Irrigation in Diversified Vegetable Crops: System Development and Evaluation. AgriEngineering 2024, 6, 3227-3241. https://doi.org/10.3390/agriengineering6030184
Magalhães TOP, Pinto MF, Oliveira MVMd, Carvalho DFd. Variable-Rate Irrigation in Diversified Vegetable Crops: System Development and Evaluation. AgriEngineering. 2024; 6(3):3227-3241. https://doi.org/10.3390/agriengineering6030184
Chicago/Turabian StyleMagalhães, Thalissa Oliveira Pires, Marinaldo Ferreira Pinto, Marcus Vinícius Morais de Oliveira, and Daniel Fonseca de Carvalho. 2024. "Variable-Rate Irrigation in Diversified Vegetable Crops: System Development and Evaluation" AgriEngineering 6, no. 3: 3227-3241. https://doi.org/10.3390/agriengineering6030184