
Comparative Performance of a Sprayer Rate Controller and Pulse Width Modulation (PWM) Systems for Site-Specific Pesticide Applications




Abstract
:1. Introduction
2. Materials and Methods
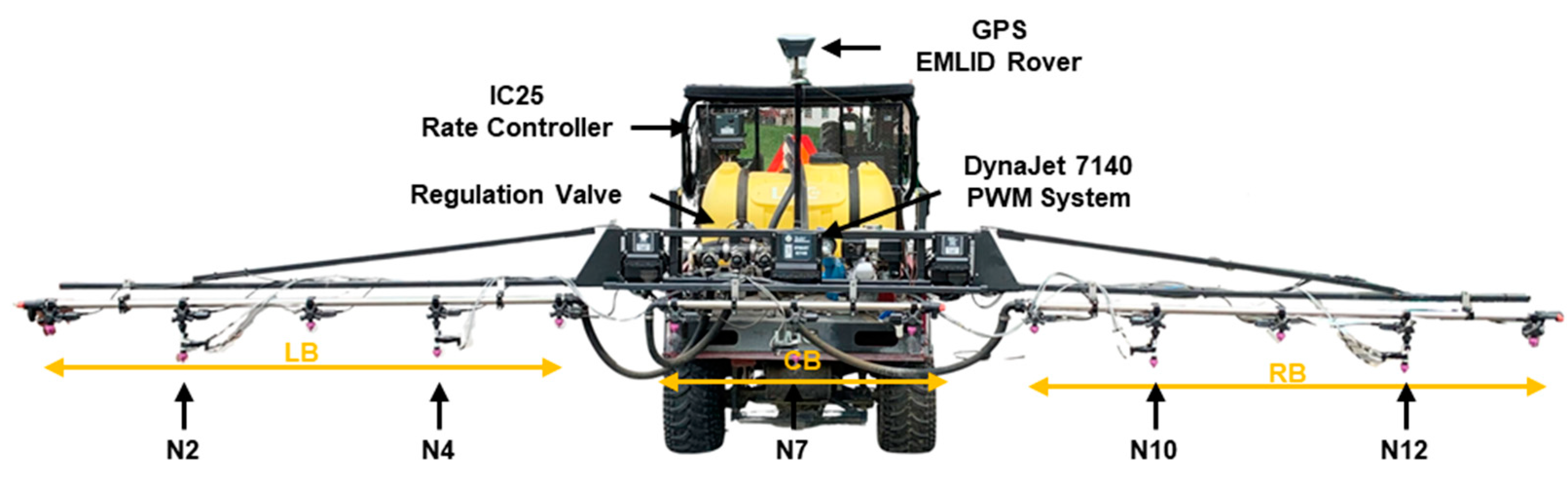
2.1. Application Equipment
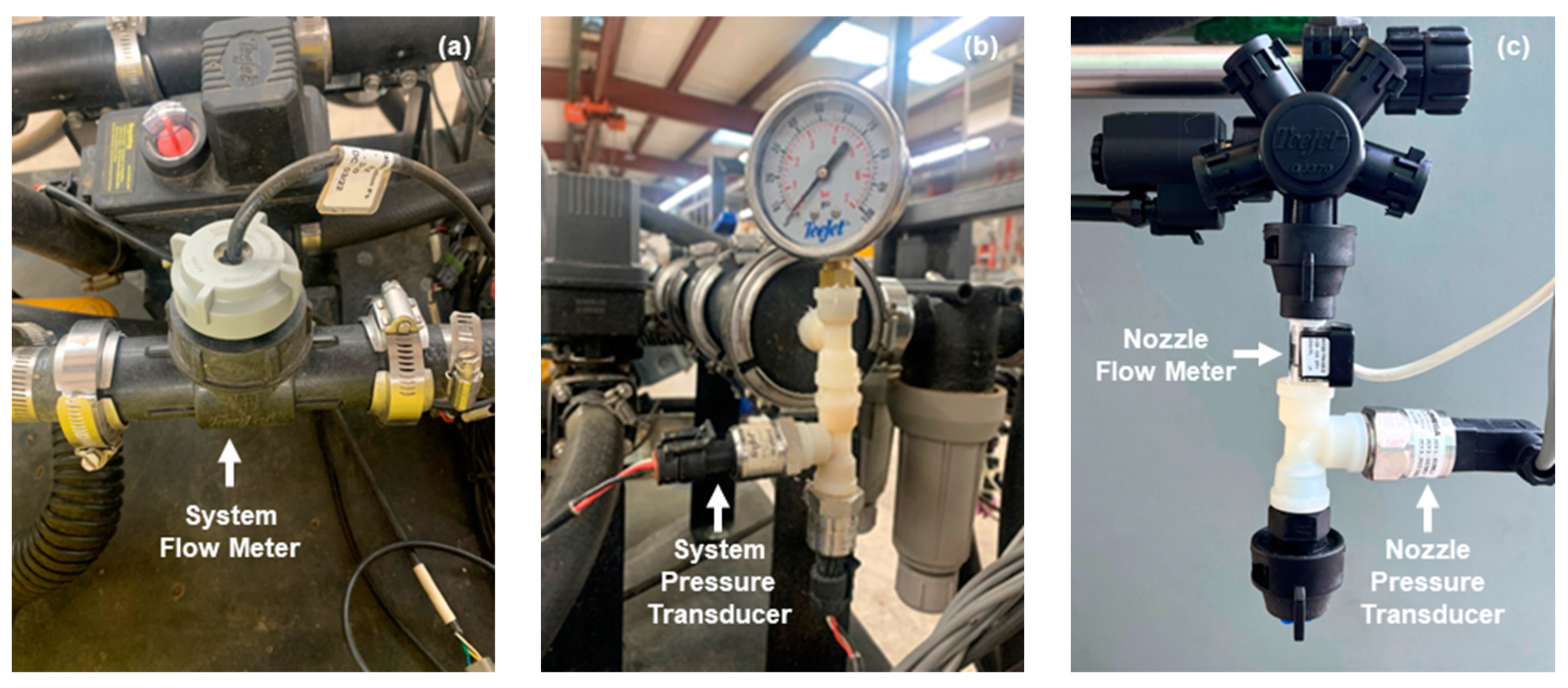
2.2. Instrumentation and Data Acquisition
2.3. Study Design and Data Collection
2.4. Data Analysis
3. Results and Discussion
3.1. Single-Rate Site-Specific (SRSS) Tests
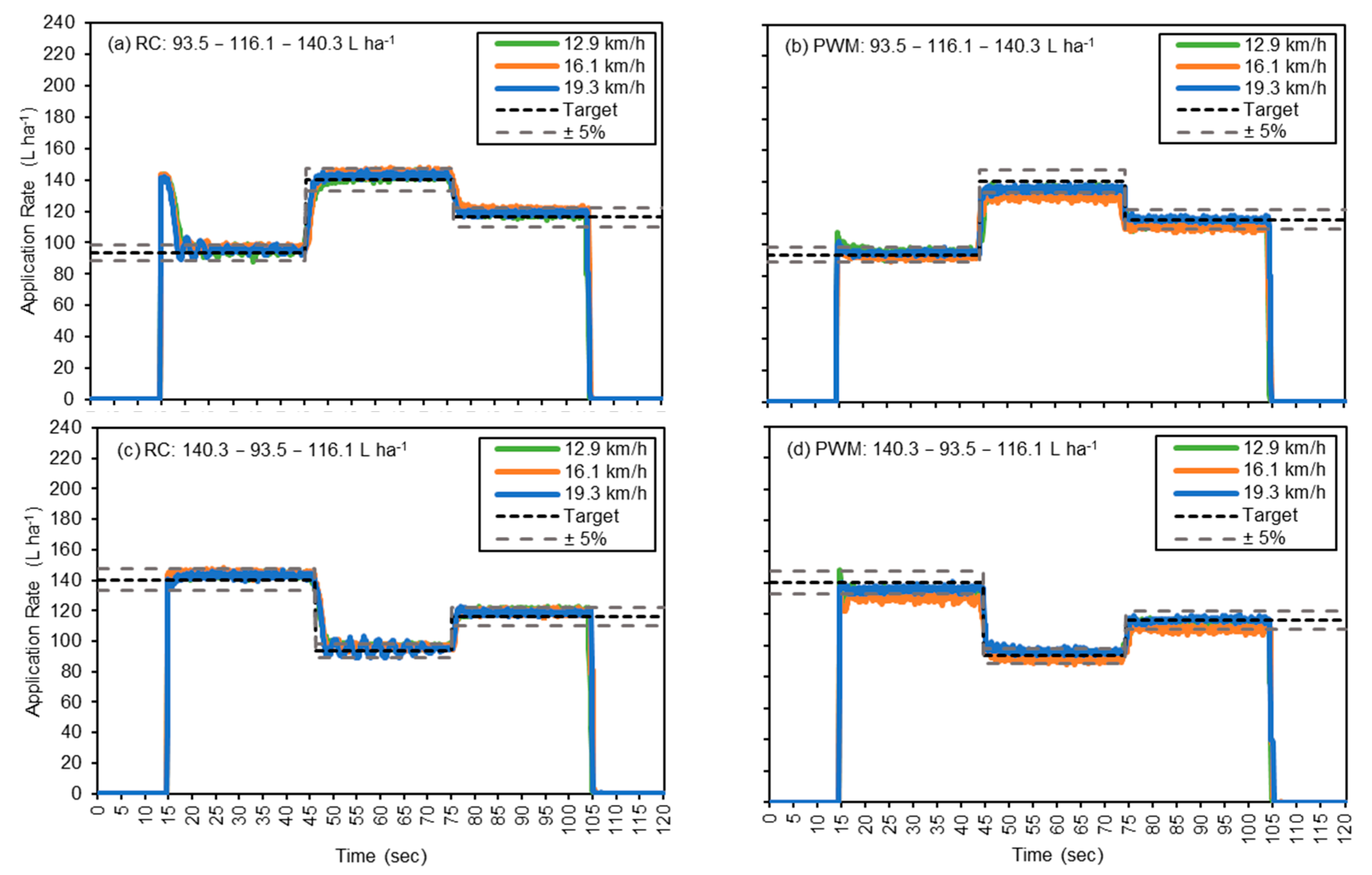
3.2. Variable-Rate Site-Specific (VRSS) Application Tests
4. Research Implications
5. Conclusions and Future Work
- Single-Rate Site-Specific Applications:
- The PWM system demonstrated a consistently lower mean rate stabilization time in achieving the target rates across all simulated speeds compared to the RC system.
- The RC system exhibited an increased mean rate stabilization time at lower simulated ground speeds.
- Both systems showed improved performance (reduced rate stabilization time) at higher target rates or increased simulated ground speeds.
- Variable-Rate Site-Specific Applications:
- The PWM system demonstrated a lower mean rate transition time across both rate increments and decrements across all simulated speeds.
- The RC system exhibited a higher rate transition time for rate decrements and a lower transition time for rate increments.
- Both systems demonstrated improved performance (reduced rate transition and stabilization times) at increased simulated ground speeds.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- FAO. Pesticides Use and Trade—1990–2022; FAOSTAT Analytical Briefs, No. 89; FAO: Rome, Italy, 2024. [Google Scholar] [CrossRef]
- Swanton, C.J.; Shrestha, A.; Chandler, K.; Deen, W. An Economic Assessment of Weed Control Strategies in No-Till Glyphosate-Resistant Soybean (Glycine Max). Weed Technol. 2000, 14, 755–763. [Google Scholar] [CrossRef]
- Luck, J.D.; Zandonadi, R.S.; Luck, B.D.; Shearer, S.A. Reducing Pesticide Over-Application with Map-Based Automatic Boom Section Control on Agricultural Sprayers. Trans. ASABE 2010, 53, 685–690. [Google Scholar] [CrossRef]
- Sharda, A.; Fulton, J.P.; McDonald, T.P.; Zech, W.C.; Darr, M.J.; Brodbeck, C.J. Real-Time Pressure and Flow Dynamics Due to Boom Section and Individual Nozzle Control on Agricultural Sprayers. Trans. ASABE 2010, 53, 1363–1371. [Google Scholar] [CrossRef]
- Fabula, J.; Sharda, A.; Kang, Q.; Flippo, D. Nozzle Flow Rate, Pressure Drop, and Response Time of Pulse Width Modulation (PWM) Nozzle Control Systems. Trans. ASABE 2021, 64, 1519–1532. [Google Scholar] [CrossRef]
- Reyes, J.F.; Esquivel, W.; Cifuentes, D.; Ortega, R. Field Testing of an Automatic Control System for Variable Rate Fertilizer Application. Comput. Electron. Agric. 2015, 113, 260–265. [Google Scholar] [CrossRef]
- Yang, C.; Everitt, J.H.; Bradford, J.M. Comparisons of Uniform and Variable Rate Nitrogen and Phosphorus Fertilizer Applications for Grain Sorghum. Trans. ASAE 2001, 44, 201–209. [Google Scholar] [CrossRef]
- Langley, R.L.; Mort, S.A. Human Exposures to Pesticides in the United States. J. Agromed. 2012, 17, 300–315. [Google Scholar] [CrossRef]
- Bora, G.C.; Schrock, M.D.; Oard, D.L.; Grimm, J. Performance of a Pulse Width Modulated (PWM) Single to Multifold Outlet System for Variable-rate Anhydrous Ammonia Application. Trans. ASABE 2011, 54, 397–402. [Google Scholar] [CrossRef]
- Huang, H.; Deng, J.; Lan, Y.; Yang, A.; Deng, X.; Wen, S.; Zhang, H.; Zhang, Y. Accurate Weed Mapping and Prescription Map Generation Based on Fully Convolutional Networks Using UAV Imagery. Sensors 2018, 18, 3299. [Google Scholar] [CrossRef]
- Jiang, H.; Zhang, L.; Shi, W. Effects of Operating Parameters for Dynamic PWM Variable Spray System on Spray Distribution Uniformity. IFAC-PapersOnLine 2016, 49, 216–220. [Google Scholar] [CrossRef]
- Fabula, J.V.; Sharda, A. Field Evaluation of Turn Compensation Feature of Pulse Width Modulation (PWM) Equipped Agricultural Sprayer. In Proceedings of the 2021 ASABE Annual International Virtual Meeting, Online, 12–16 July 2021; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2021. [Google Scholar]
- Luck, J.D.; Zandonadi, R.S.; Luck, B.D.; Shearer, S.A. Effects of Field Shape and Size on Application Errors Using Manual and Automatic Boom Section Control on a Self-Propelled Agricultural Sprayer. In Proceedings of the 2010 ASABE Annual International Meeting, Pittsburgh, PA, USA, 20–23 June 2010; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2010. [Google Scholar]
- Sharda, A.; Fulton, J.P.; McDonald, T.P.; Brodbeck, C.J. Real-Time Nozzle Flow Uniformity When Using Automatic Section Control on Agricultural Sprayers. Comput. Electron. Agric. 2011, 79, 169–179. [Google Scholar] [CrossRef]
- Villette, S.; Maillot, T.; Guillemin, J.P.; Douzals, J.P. Simulation-Aided Study of Herbicide Patch Spraying: Influence of Spraying Features and Weed Spatial Distributions. Comput. Electron. Agric. 2021, 182, 105981. [Google Scholar] [CrossRef]
- Grella, M.; Gioelli, F.; Marucco, P.; Zwertvaegher, I.; Mozzanini, E.; Mylonas, N.; Nuyttens, D.; Balsari, P. Field Assessment of a Pulse Width Modulation (PWM) Spray System Applying Different Spray Volumes: Duty Cycle and Forward Speed Effects on Vines Spray Coverage. Precis. Agric. 2021, 23, 219–252. [Google Scholar] [CrossRef]
- Sharda, A.; Luck, J.D.; Fulton, J.P.; McDonald, T.P.; Shearer, S.A. Field Application Uniformity and Accuracy of Two Rate Control Systems with Automatic Section Capabilities on Agricultural Sprayers. Precis. Agric. 2013, 14, 307–322. [Google Scholar] [CrossRef]
- Ayers, P.D.; Rogowski, S.M.; Kimble, B.L. An Investigation of Factors Affecting Sprayer Control System Performance. Appl. Eng. Agric. 1990, 6, 701–706. [Google Scholar] [CrossRef]
- Luck, J.D.; Sharda, A.; Pitla, S.K.; Fulton, J.P.; Shearer, S.A. A Case Study Concerning the Effects of Controller Response and Turning Movements on Application Rate Uniformity with a Self-Propelled Sprayer. Trans. ASABE 2011, 54, 423–431. [Google Scholar] [CrossRef]
- Butts, T.R.; Butts, L.E.; Luck, J.D.; Fritz, B.K.; Hoffmann, W.C.; Kruger, G.R. Droplet Size and Nozzle Tip Pressure from a Pulse-Width Modulation Sprayer. Biosyst. Eng. 2019, 178, 52–69. [Google Scholar] [CrossRef]
- Mangus, D.L.; Sharda, A.; Engelhardt, A.; Flippo, D.; Strasser, R.; Luck, J.D.; Griffin, T. Analyzing the Nozzle Spray Fan Pattern of an Agricultural Sprayer Using Pulse Width Modulation Technology to Generate an On-Ground Coverage Map. Trans. ASABE 2017, 60, 315–325. [Google Scholar] [CrossRef]
- Fulton, J.P.; Shearer, S.A.; Chabra, G.; Higgins, S.F. Performance Assessment and Model Development of a Variable–Rate, Spinner–Disc Fertilizer Applicator. Trans. ASAE 2001, 44, 1071–1081. [Google Scholar] [CrossRef]
- Bandyopadhyay, D.; Bhavsar, D.; Pandey, K.; Gupta, S.; Roy, A. Red Edge Index as an Indicator of Vegetation Growth and Vigor Using Hyperspectral Remote Sensing Data. Proc. Natl. Acad. Sci. India Sect. A Phys. Sci. 2017, 87, 879–888. [Google Scholar] [CrossRef]
- Castaldi, F.; Pelosi, F.; Pascucci, S.; Casa, R. Assessing the Potential of Images from Unmanned Aerial Vehicles (UAV) to Support Herbicide Patch Spraying in Maize. Precis. Agric. 2017, 18, 76–94. [Google Scholar] [CrossRef]
- See and Spray. In John Deere’s See & Spray Ultimate Cuts Chemical Use by Targeting Weeds with Precision Spraying; John Deere: Moline, IL, USA, 2024; Available online: https://www.deere.com/en/sprayers/see-spray-ultimate/ (accessed on 14 September 2023).
- Virk, S.; Meena, R. Pulse Width Modulation Technology for Agricultural Sprayers; Circular 1277; University of Georgia Cooperative Extension: Tifton, GA, USA, 2022; Available online: https://extension.uga.edu/publications/detail.html?number=C1277&title=pulse-width-modulation-technology-for-agricultural-sprayers (accessed on 14 September 2023).
- Butts, T.R.; Luck, J.D.; Fritz, B.K.; Hoffmann, W.C.; Kruger, G.R. Evaluation of Spray Pattern Uniformity Using Three Unique Analyses as Impacted by Nozzle, Pressure, and Pulse-width Modulation Duty Cycle. Pest Manag. Sci. 2019, 75, 1875–1886. [Google Scholar] [CrossRef] [PubMed]
- GopalaPillai, S.; Tian, L.; Zheng, J. Evaluation of a Flow Control System for Site-Specific Herbicide Applications. Trans. ASAE 1999, 42, 863–870. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Control System | Speed (km h−1) | Target Rate (L ha−1) | Nozzle | Pressure (kPa) | Duty Cycle (%) |
|---|---|---|---|---|---|
| RC | 12.9 | 93.5 | XRC110025 | 255.1 | - |
| 116.1 | XRC11003 | 262.1 | - | ||
| 140.3 | XRC11004 | 234.4 | - | ||
| 16.1 | 93.5 | XRC11003 | 262.1 | - | |
| 116.1 | XRC11004 | 248.2 | - | ||
| 140.3 | XRC11005 | 234.4 | - | ||
| 19.3 | 93.5 | XRC11004 | 227.5 | - | |
| 116.1 | XRC11005 | 227.5 | - | ||
| 140.3 | XRC11006 | 262.1 | - | ||
| PWM | 12.9 | 93.5 | XRC11004 | 268.8 | 55 |
| 116.1 | XRC11004 | 268.8 | 70 | ||
| 140.3 | XRC11004 | 268.8 | 84 | ||
| 16.1 | 93.5 | XRC11005 | 282.7 | 56 | |
| 116.1 | XRC11005 | 282.7 | 72 | ||
| 140.3 | XRC11005 | 282.7 | 86 | ||
| 19.3 | 93.5 | APTJ11008 | 365.4 | 58 | |
| 116.1 | APTJ11008 | 365.4 | 75 | ||
| 140.3 | APTJ11008 | 365.4 | 85 |
| Control System | Speed (km h−1) | Target Rate (L ha−1) | Nozzle | Pressure (kPa) | Duty Cycle (%) |
|---|---|---|---|---|---|
| RC | 12.9 | 93.5 | XRC11003 | 172.4 | - |
| 116.1 | XRC11003 | 262.1 | - | ||
| 140.3 | XRC11003 | 365.4 | - | ||
| 16.1 | 93.5 | XRC11004 | 158.6 | - | |
| 116.1 | XRC11004 | 248.2 | - | ||
| 140.3 | XRC11004 | 351.6 | - | ||
| 19.3 | 93.5 | XRC11005 | 151.6 | - | |
| 116.1 | XRC11005 | 234.4 | - | ||
| 140.3 | XRC11005 | 337.8 | - | ||
| PWM | 12.9 | 93.5 | XRC11004 | 268.9 | 55 |
| 116.1 | XRC11004 | 268.9 | 70 | ||
| 140.3 | XRC11004 | 268.9 | 84 | ||
| 16.1 | 93.5 | XRC11005 | 282.7 | 56 | |
| 116.1 | XRC11005 | 282.7 | 72 | ||
| 140.3 | XRC11005 | 282.7 | 86 | ||
| 19.3 | 93.5 | APTJ11008 | 365.4 | 58 | |
| 116.1 | APTJ11008 | 365.4 | 75 | ||
| 140.3 | APTJ11008 | 365.4 | 85 |
| Control System | Speed (km h−1) | Target Rate (L ha−1) | Time (ms) | |||
|---|---|---|---|---|---|---|
| Mean[a] | Min. | Max. | Std. Dev. | |||
| RC | 12.9 | 93.5 | 4033 a | 4000 | 4100 | 58 |
| 116.1 | 3567 ab | 3500 | 3600 | 58 | ||
| 140.3 | 3400 b | 3100 | 3800 | 361 | ||
| 16.1 | 93.5 | 3300 b | 3100 | 3400 | 173 | |
| 116.1 | 3333 b | 2800 | 4400 | 924 | ||
| 140.3 | 2233 c | 2200 | 2300 | 58 | ||
| 19.3 | 93.5 | 2967 b | 2900 | 3100 | 115 | |
| 116.1 | 2967 b | 2800 | 3200 | 208 | ||
| 140.3 | 1133 de | 300 | 2400 | 1115 | ||
| PWM | 12.9 | 93.5 | 1350 d | 1300 | 1400 | 50 |
| 116.1 | 667 ef | 500 | 1000 | 289 | ||
| 140.3 | 300 f | 200 | 400 | 100 | ||
| 16.1 | 93.5 | 467 f | 400 | 500 | 58 | |
| 116.1 | 333 f | 300 | 400 | 58 | ||
| 140.3 | 200 f | 200 | 200 | 0 | ||
| 19.3 | 93.5 | 200 f | 200 | 200 | 0 | |
| 116.1 | 167 f | 100 | 200 | 58 | ||
| 140.3 | 100 f | 100 | 100 | 0 | ||
| Control System | Speed (km h−1) | Rate Transition (L ha−1) | Time (ms) | |||
|---|---|---|---|---|---|---|
| Mean[a] | Min | Max | Std. Dev. | |||
| RC | 12.9 | −46.8 | 3211 a | 2600 | 4800 | 694 |
| −23.4 | 1117 fgk | 600 | 1900 | 405 | ||
| 23.4 | 650 jk | 300 | 1000 | 192 | ||
| 46.8 | 2600 b | 2200 | 3000 | 352 | ||
| 16.1 | −46.8 | 1678 c | 1400 | 1800 | 130 | |
| −23.4 | 967 hi | 500 | 2500 | 535 | ||
| 23.4 | 661 jk | 500 | 1000 | 124 | ||
| 46.8 | 1433 cde | 1300 | 1600 | 151 | ||
| 19.3 | −46.8 | 1500 cde | 600 | 1800 | 354 | |
| −23.4 | 600 k | 400 | 800 | 133 | ||
| 23.4 | 593 k | 400 | 900 | 142 | ||
| 46.8 | 1417 cde | 1200 | 1800 | 264 | ||
| PWM | 12.9 | −46.8 | 833 ij | 200 | 1300 | 387 |
| −23.4 | 278 l | 100 | 700 | 173 | ||
| 23.4 | 478 k | 100 | 1400 | 366 | ||
| 46.8 | 1367 def | 1200 | 1500 | 121 | ||
| 16.1 | −46.8 | 244 l | 100 | 600 | 181 | |
| −23.4 | 247 l | 100 | 700 | 187 | ||
| 23.4 | 1227 efg | 800 | 1700 | 322 | ||
| 46.8 | 1600 cd | 1500 | 1700 | 100 | ||
| 19.3 | −46.8 | 150 l | 100 | 200 | 58 | |
| −23.4 | 222 l | 100 | 600 | 126 | ||
| 23.4 | 189 l | 100 | 400 | 96 | ||
| 46.8 | 1022 ghi | 600 | 1700 | 421 | ||
| Test | System | Target (L ha−1) | Speed (km h−1) | Mean Time (ms) | Distance (m) |
|---|---|---|---|---|---|
| SRSS | RC | 93.5 | 12.9 | 4033 | 14.4 |
| 116.1 | 12.9 | 3567 | 12.8 | ||
| 140.3 | 12.9 | 3400 | 12.2 | ||
| PWM | 93.5 | 12.9 | 1350 | 4.8 | |
| 116.1 | 12.9 | 667 | 2.4 | ||
| 140.3 | 12.9 | 300 | 1.1 | ||
| VRSS | RC | 23.4 | 12.9 | 1456 | 5.2 |
| 46.8 | 12.9 | 3211 | 11.5 | ||
| PWM | 23.4 | 12.9 | 222 | 0.8 | |
| 46.8 | 12.9 | 833 | 3.0 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Meena, R.; Virk, S.; Rains, G.; Porter, W. Comparative Performance of a Sprayer Rate Controller and Pulse Width Modulation (PWM) Systems for Site-Specific Pesticide Applications. AgriEngineering 2024, 6, 3312-3326. https://doi.org/10.3390/agriengineering6030189
Meena R, Virk S, Rains G, Porter W. Comparative Performance of a Sprayer Rate Controller and Pulse Width Modulation (PWM) Systems for Site-Specific Pesticide Applications. AgriEngineering. 2024; 6(3):3312-3326. https://doi.org/10.3390/agriengineering6030189
Chicago/Turabian StyleMeena, Ravi, Simerjeet Virk, Glen Rains, and Wesley Porter. 2024. "Comparative Performance of a Sprayer Rate Controller and Pulse Width Modulation (PWM) Systems for Site-Specific Pesticide Applications" AgriEngineering 6, no. 3: 3312-3326. https://doi.org/10.3390/agriengineering6030189