

Nutritional Monitoring of Rhodena Lettuce via Neural Networks and Point Cloud Analysis
 , ,
, ,  , , and
, , and
Abstract
:1. Introduction
2. Related Works
3. Methods
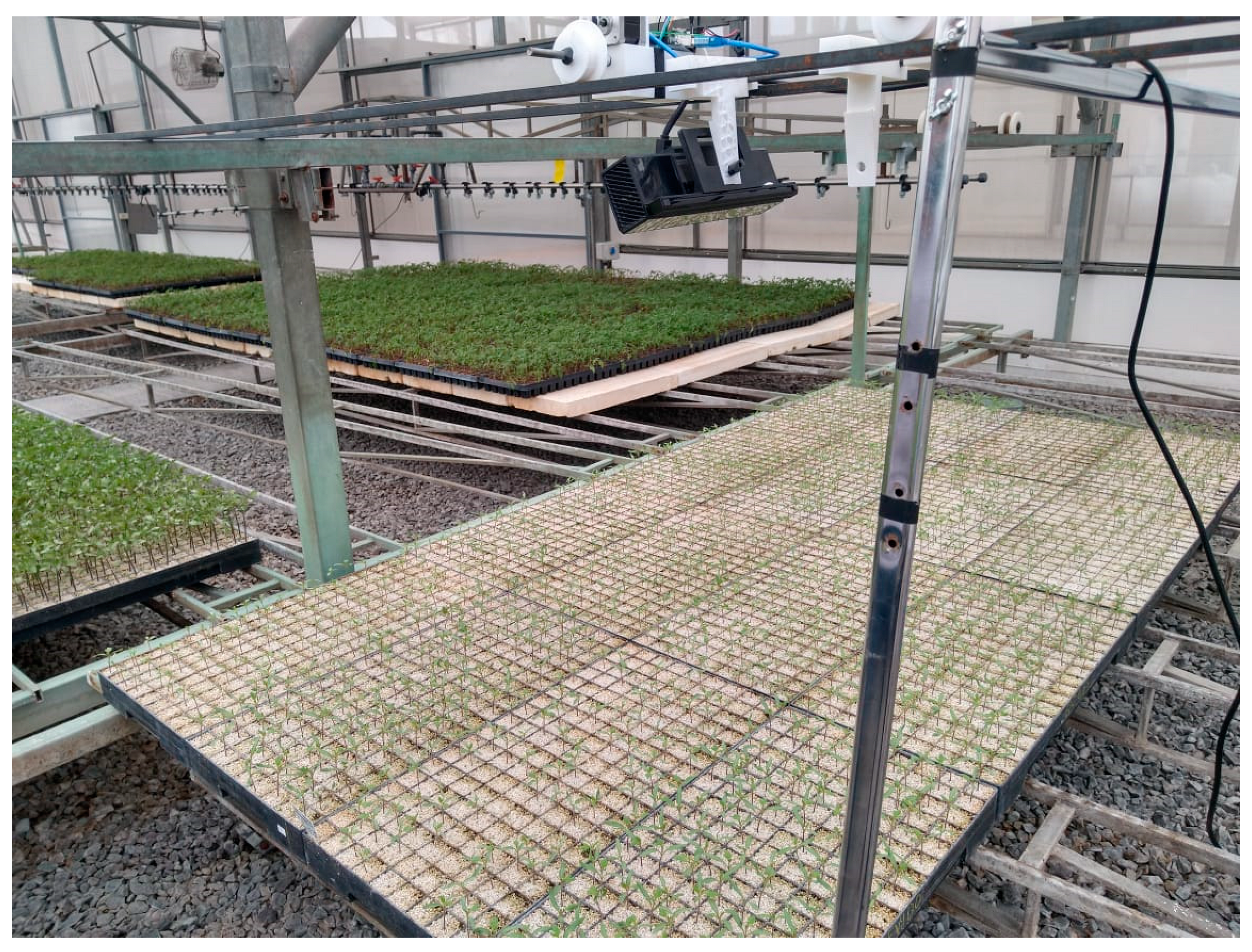
- Data acquisition. In this step, we created two datasets of Rhodena lettuce seedling images labeled with macroelements and point clouds.
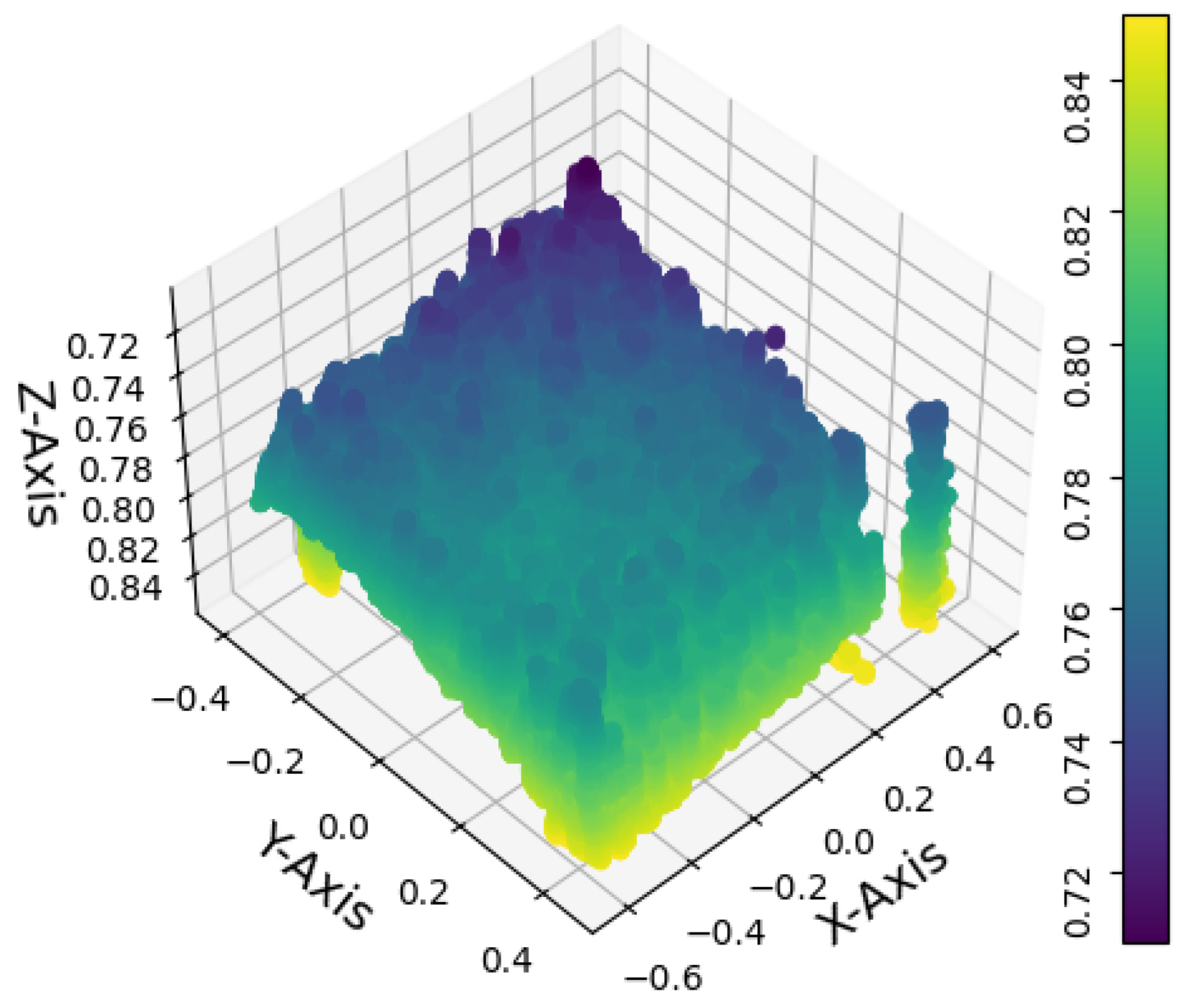
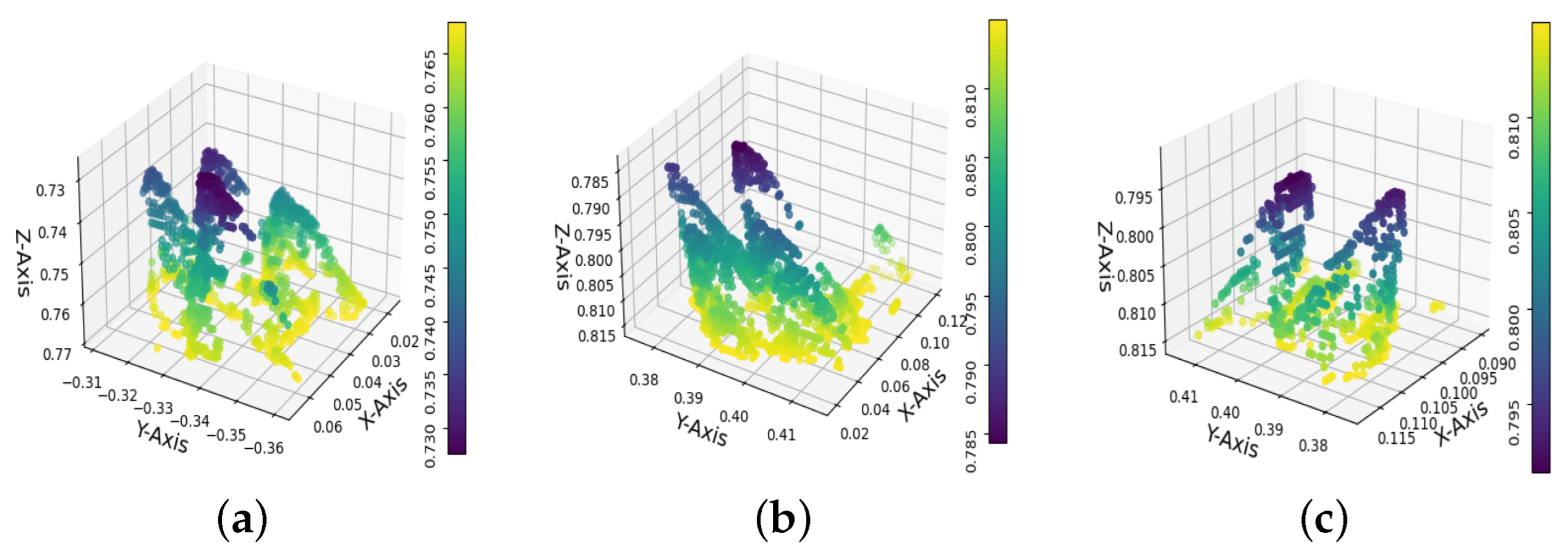
- Point cloud registration. We used the iterative closest point (ICP) algorithm to register the different point clouds of the crops.
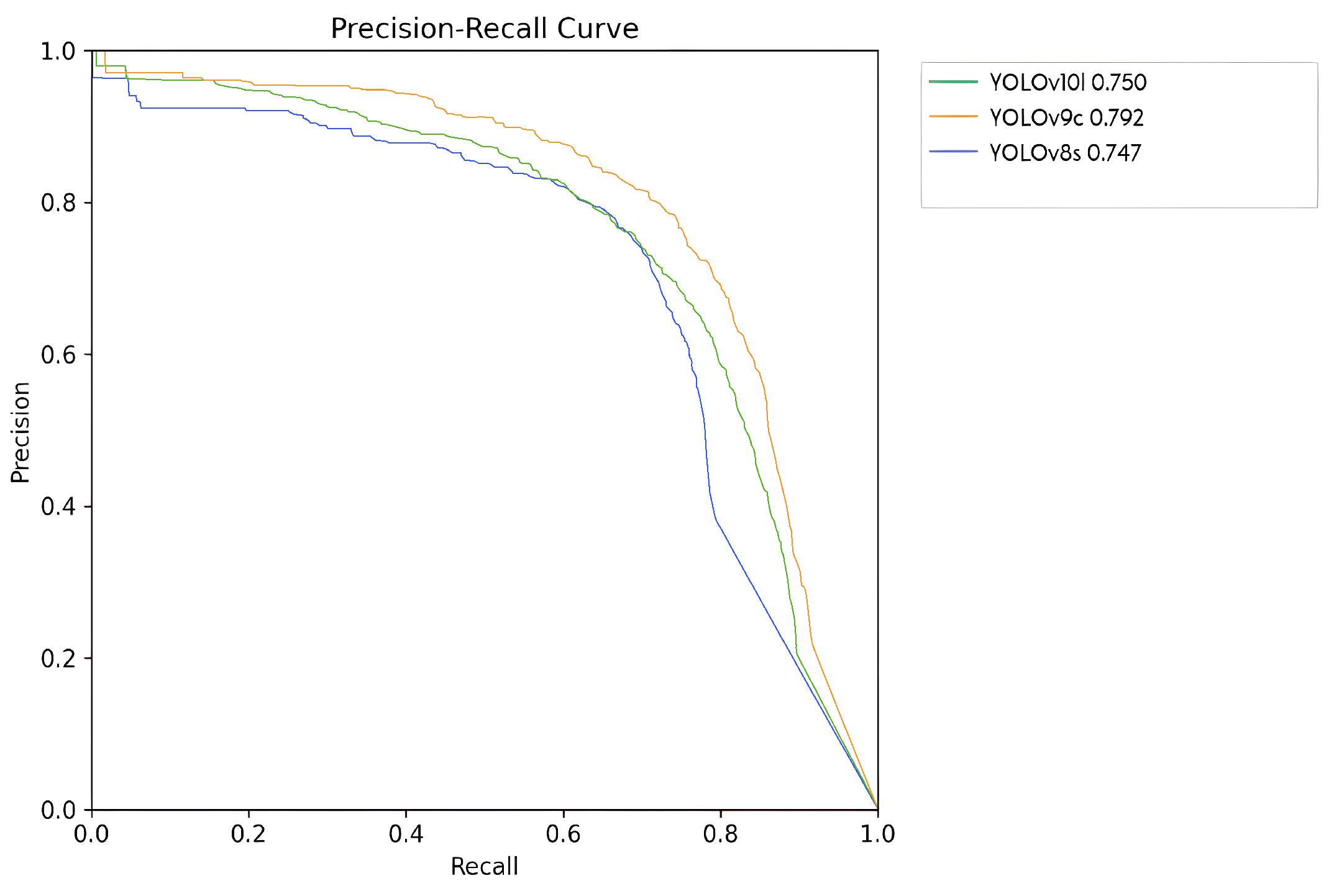
- Training and evaluation. We trained and evaluated multiple machine learning models to detect the lack of nitrogen based on the seedlings morphology and we also trained multiple object detection architectures, including YOLOv8 [48], YOLOv9 [49], and YOLOv10 [50], to detect the lack of potassium based on the lettuces texture.
- Results comparison: In this final step, we compare the results obtained from laboratory tests with those obtained from our system.
3.1. Data Acquisition
3.2. Point Cloud Registration
- From the current variable , recover the rotation matrix and translation vector .
- Perform the ICP update .
- Compute the parameterization of to obtain .
- Compute the accelerated value with Anderson acceleration using , and .
3.3. Detection of Nitrogen Deficiencies
3.4. Detection of Potassium Deficiency
- Single step grid predictions. It divides the image I into grid cells, where each cell contains detection predictions.
- Bounding box regression. It determines the bounding boxes, which correspond to the rectangles that contain the objects in the image. The attributes of these bounding boxes are determined using a single regression module as shown in Equation (3).Here, Y is the vector representation of each bounding box, p is the probability score of each grid cell containing an object [0, 1], are the coordinates of the center of the bounding box concerning the grid cell, is the height and width of the bounding box to the cell, and c is the class for the n number of classes.
- Nonmaximum suppression (NMS). An object may have several overlapped detections. NMS keeps the predictions with the highest detection confidence.
3.4.1. YOLOv8
3.4.2. YOLOv9
3.4.3. YOLOv10
3.5. Evaluation Metrics
4. Results
4.1. Laboratory Tests
4.2. Detection of Nitrogen Deficiencies
4.3. Detection of Potassium Deficiency
5. Discussion and Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Natesh, H.; Abbey, L.; Asiedu, S. An overview of nutritional and antinutritional factors in green leafy vegetables. Hortic. Int. J. 2017, 1, 58–65. [Google Scholar] [CrossRef]
- Kumar, D.; Kumar, S.; Shekhar, C. Nutritional components in green leafy vegetables: A review. J. Pharmacogn. Phytochem. 2020, 9, 2498–2502. Available online: https://www.phytojournal.com/archives/2020.v9.i5.12718/nutritional-components-in-green-leafy-vegetables-a-review (accessed on 1 August 2024).
- Gupta, K.; Barat, G.; Wagle, D.; Chawla, H. Nutrient contents and antinutritional factors in conventional and non-conventional leafy vegetables. Food Chem. 1989, 31, 105–116. [Google Scholar] [CrossRef]
- Das, R.; Bhattacharjee, C. Chapter 9—Lettuce. In Nutritional Composition and Antioxidant Properties of Fruits and Vegetables; Jaiswal, A.K., Ed.; Academic Press: Cambridge, MA, USA, 2020; pp. 143–157. [Google Scholar] [CrossRef]
- Medina-Lozano, I.; Bertolín, J.R.; Díaz, A. Nutritional value of commercial and traditional lettuce (Lactuca sativa L.) and wild relatives: Vitamin C and anthocyanin content. Food Chem. 2021, 359, 129864. [Google Scholar] [CrossRef]
- Shi, M.; Gu, J.; Wu, H.; Rauf, A.; Emran, T.B.; Khan, Z.; Mitra, S.; Aljohani, A.S.M.; Alhumaydhi, F.A.; Al-Awthan, Y.S.; et al. Phytochemicals, Nutrition, Metabolism, Bioavailability, and Health Benefits in Lettuce—A Comprehensive Review. Antioxidants 2022, 11, 1158. [Google Scholar] [CrossRef]
- Faran, M.; Nadeem, M.; Manful, C.F.; Galagedara, L.; Thomas, R.H.; Cheema, M. Agronomic Performance and Phytochemical Profile of Lettuce Grown in Anaerobic Dairy Digestate. Agronomy 2023, 13, 182. [Google Scholar] [CrossRef]
- Frasetya, B.; Harisman, K.; Ramdaniah, N.A.H. The effect of hydroponics systems on the growth of lettuce. IOP Conf. Ser. Mater. Sci. Eng. 2021, 1098, 042115. [Google Scholar] [CrossRef]
- Majid, M.; Khan, J.N.; Ahmad Shah, Q.M.; Masoodi, K.Z.; Afroza, B.; Parvaze, S. Evaluation of hydroponic systems for the cultivation of Lettuce (Lactuca sativa L., var. longifolia) and comparison with protected soil-based cultivation. Agric. Water Manag. 2021, 245, 106572. [Google Scholar] [CrossRef]
- Sularz, O.; Smoleń, S.; Koronowicz, A.; Kowalska, I.; Leszczyńska, T. Chemical Composition of Lettuce (Lactuca sativa L.) Biofortified with Iodine by KIO3, 5-Iodo-, and 3.5-Diiodosalicylic Acid in a Hydroponic Cultivation. Agronomy 2020, 10, 1022. [Google Scholar] [CrossRef]
- Mujiono, M.; Suyono, S.; Purwanto, P. Growth and Yield of Lettuce (Lactuca sativa L.) Under Organic Cultivation. Planta Trop. 2017, 5, 127–131. [Google Scholar] [CrossRef]
- Cova, A.M.W.; Freitas, F.T.O.d.; Viana, P.C.; Rafael, M.R.S.; Azevedo, A.D.d.; Soares, T.M. Content of inorganic solutes in lettuce grown with brackish water in different hydroponic systems. Rev. Bras. Eng. Agríc. Ambient. 2017, 21, 150–155. [Google Scholar] [CrossRef]
- Jose, V.; Gino, A.; Noel, O. Humus líquido y microorganismos para favorecer la producción de lechuga (Lactuca sativa var. crespa) en cultivo de hidroponía. J. Selva Andin. Biosph. 2016, 4, 71–83. Available online: http://www.scielo.org.bo/scielo.php?script=sci_arttext&pid=S2308-38592016000200004&nrm=iso (accessed on 1 August 2024). [CrossRef]
- Monge, C.; Chaves, C.; Arias, M.L. Comparación de la calidad bacteriológica de la lechuga (Lactuca sativa) producida en Costa Rica mediante cultivo tradicional, orgánico o hidropónico. Arch. Latinoam. Nutr. Super. 2011, 61, 69–73. Available online: http://ve.scielo.org/scielo.php?script=sci_arttext&pid=S0004-06222011000100009&nrm=iso (accessed on 1 August 2024).
- Saah, K.J.A.; Kaba, J.S.; Abunyewa, A.A. Inorganic nitrogen fertilizer, biochar particle size and rate of application on lettuce (Lactuca sativa L.) nitrogen use and yield. All Life 2022, 15, 624–635. [Google Scholar] [CrossRef]
- Dávila Rangel, I.E.; Trejo Téllez, L.I.; Ortega Ortiz, H.; Juárez Maldonado, A.; González Morales, S.; Companioni González, B.; Cabrera De la Fuente, M.; Benavides Mendoza, A. Comparison of Iodide, Iodate, and Iodine-Chitosan Complexes for the Biofortification of Lettuce. Appl. Sci. 2020, 10, 2378. [Google Scholar] [CrossRef]
- Liu, Q.; Huang, L.; Chen, Z.; Wen, Z.; Ma, L.; Xu, S.; Wu, Y.; Liu, Y.; Feng, Y. Biochar and its combination with inorganic or organic amendment on growth, uptake and accumulation of cadmium on lettuce. J. Clean. Prod. 2022, 370, 133610. [Google Scholar] [CrossRef]
- Ahmed, Z.F.R.; Alnuaimi, A.K.H.; Askri, A.; Tzortzakis, N. Evaluation of Lettuce (Lactuca sativa L.) Production under Hydroponic System: Nutrient Solution Derived from Fish Waste vs. Inorganic Nutrient Solution. Horticulturae 2021, 7, 292. [Google Scholar] [CrossRef]
- Anisuzzaman, M.; Rafii, M.Y.; Jaafar, N.M.; Izan Ramlee, S.; Ikbal, M.F.; Haque, M.A. Effect of Organic and Inorganic Fertilizer on the Growth and Yield Components of Traditional and Improved Rice (Oryza sativa L.) Genotypes in Malaysia. Agronomy 2021, 11, 1830. [Google Scholar] [CrossRef]
- El-Mogy, M.M.; Abdelaziz, S.M.; Mahmoud, A.W.M.; Elsayed, T.R.; Abdel-Kader, N.H.; Mohamed, M.I.A. Comparative Effects of Different Organic and Inorganic Fertilisers on Soil Fertility, Plant Growth, Soil Microbial Community, and Storage Ability of Lettuce. Agric. (Pol’nohospodárstvo) 2020, 66, 87–107. [Google Scholar] [CrossRef]
- Zhang, E.; Lin, L.; Liu, J.; Li, Y.; Jiang, W.; Tang, Y. The effects of organic fertilizer and inorganic fertilizer on yield and quality of lettuce. Adv. Eng. Res. 2022, 129, 624–635. [Google Scholar] [CrossRef]
- Pavlou, G.C.; Ehaliotis, C.D.; Kavvadias, V.A. Effect of organic and inorganic fertilizers applied during successive crop seasons on growth and nitrate accumulation in lettuce. Sci. Hortic. 2007, 111, 319–325. [Google Scholar] [CrossRef]
- Kutyauripo, I.; Rushambwa, M.; Chiwazi, L. Artificial intelligence applications in the agrifood sectors. J. Agric. Food Res. 2023, 11, 100502. [Google Scholar] [CrossRef]
- Rameshwari, D. Classification of Macronutrient Deficiencies in Maize Plant using Machine Learning. Int. J. Res. Appl. Sci. Eng. Technol. 2021, 9, 4321–4326. [Google Scholar] [CrossRef]
- Raju, S.H.; Adinarayna, S.; Prasanna, N.M.; Jumlesha, S.; Sesadri, U.; Hema, C. Nutrient Deficiency Detection using a MobileNet: An AI-based Solution. In Proceedings of the 2023 7th International Conference on I-SMAC (IoT in Social, Mobile, Analytics and Cloud) (I-SMAC), Kirtipur, Nepal, 11–13 October 2023; pp. 609–615. [Google Scholar] [CrossRef]
- Krishna, V.; Raju, Y.D.S.; Raghavendran, C.V.; Naresh, P.; Rajesh, A. Identification of Nutritional Deficiencies in Crops Using Machine Learning and Image Processing Techniques. In Proceedings of the 2022 3rd International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 27–29 April 2022; pp. 925–929. [Google Scholar] [CrossRef]
- Suleiman, R.F.R.; Riduwan, M.K.; Kamal, A.N.M.; Wahab, N.A. Soil Nutrient Deficiency Detection of Lime Trees using Signal-based Deep Learning. In Proceedings of the 2022 International Visualization, Informatics and Technology Conference (IVIT), Kuala Lumpur, Malaysia, 1–2 November 2022; pp. 261–265. [Google Scholar] [CrossRef]
- J, A.; K, M.; K, V. Plant Nutrient Deficiency Detection and Classification—A Review. In Proceedings of the 2023 5th International Conference on Inventive Research in Computing Applications (ICIRCA), Coimbatore, India, 3–5 August 2023; pp. 796–802. [Google Scholar] [CrossRef]
- Sudhakar, M.; Priya, R.M.S. Computer Vision Based Machine Learning and Deep Learning Approaches for Identification of Nutrient Deficiency in Crops: A Survey. Nat. Environ. Pollut. Technol. 2023, 22, 1387–1399. [Google Scholar] [CrossRef]
- Kok, Z.H.; Shariff, A.R.M.; Khairunniza-Bejo, S.; Kim, H.T.; Ahamed, T.; Cheah, S.S.; Wahid, S.A.A. Plot-Based Classification of Macronutrient Levels in Oil Palm Trees with Landsat-8 Images and Machine Learning. Remote Sens. 2021, 13, 2029. [Google Scholar] [CrossRef]
- Sabri, N.; Kassim, N.S.; Ibrahim, S.; Roslan, R.; Mangshor, N.N.A.; Ibrahim, Z. Nutrient deficiency detection in Maize (Zea mays L.) leaves using image processing. IAES Int. J. Artif. Intell. (IJ-AI) 2020, 9, 304. [Google Scholar] [CrossRef]
- Rahadiyan, D.; Hartati, S.; Nugroho, A. An Overview of Identification and Estimation Nutrient on Plant Leaves Image Using Machine Learning. J. Theor. Appl. Inf. Technol. 2022, 100, 1836–1852. Available online: https://www.jatit.org/volumes/Vol100No6/20Vol100No6.pdf (accessed on 1 August 2024).
- Sowmiya, M.; Krishnaveni, S. Deep Learning Techniques to Detect Crop Disease and Nutrient Deficiency—A Survey. In Proceedings of the 2021 International Conference on System, Computation, Automation and Networking (ICSCAN), Puducherry, India, 30–31 July 2021; pp. 1–5. [Google Scholar] [CrossRef]
- Kamelia, L.; Rahman, T.K.A.; Saragih, H.; Uyun, S. Survey on Hybrid Techniques in The Classification of Nutrient Deficiency Levels in Citrus Leaves. In Proceedings of the 2021 7th International Conference on Wireless and Telematics (ICWT), Bandung, Indonesia, 19–20 August 2021; pp. 1–4. [Google Scholar] [CrossRef]
- Arun, K.S.; Huang, T.S.; Blostein, S.D. Least-squares fitting of two 3-D point sets. IEEE Trans. Pattern Anal. Mach. Intell. 1987, 9, 698–700. [Google Scholar] [CrossRef]
- Besl, P.J.; McKay, N.D. Method for registration of 3-D shapes. In Proceedings of the Robotics’91: Sensor Fusion IV: Control Paradigms and Data Structures, Boston, MA, USA, 14–15 November 1991; SPIE: Bellingham, WA, USA, 1992; Volume 1611, pp. 586–606. [Google Scholar] [CrossRef]
- Chen, Y.; Medioni, G. Object modelling by registration of multiple range images. Image Vis. Comput. 1992, 10, 145–155. [Google Scholar] [CrossRef]
- Zhang, Z. Iterative point matching for registration of free-form curves and surfaces. Int. J. Comput. Vis. 1994, 13, 119–152. [Google Scholar] [CrossRef]
- Zhang, K.; Chen, H.; Wu, H.; Zhao, X.; Zhou, C. Point cloud registration method for maize plants based on conical surface fitting—ICP. Sci. Rep. 2022, 12, 6852. [Google Scholar] [CrossRef] [PubMed]
- Amritraj, S.; Hans, N.; Pretty, C.; Cyril, D. An Automated and Fine- Tuned Image Detection and Classification System for Plant Leaf Diseases. In Proceedings of the 2023 International Conference on Recent Advances in Electrical, Electronics, Ubiquitous Communication, and Computational Intelligence (RAEEUCCI), Chennai, India, 19–21 April 2023; pp. 1–5. [Google Scholar] [CrossRef]
- Pandey, P.; Patra, R. A Real-time Web-based Application for Automated Plant Disease Classification using Deep Learning. In Proceedings of the 2023 IEEE International Symposium on Smart Electronic Systems (iSES), Ahmedabad, India, 18–20 December 2023; pp. 230–235. [Google Scholar] [CrossRef]
- Nabaasa, E.; Natumanya, D.; Grace, B.; Kiwanuka, C.N.; Muhunga, K.B.J. A Model for Detecting the Presence of Pesticide Residues in Edible Parts of Tomatoes, Cabbages, Carrots, and Green Pepper Vegetables. In Proceedings of the Artificial Intelligence and Applications, Toronto, ON, Canada, 20–21 July 2024; Volume 2, pp. 225–232. [Google Scholar] [CrossRef]
- Li, H.; Gu, Z.; He, D.; Wang, X.; Huang, J.; Mo, Y.; Li, P.; Huang, Z.; Wu, F. A lightweight improved YOLOv5s model and its deployment for detecting pitaya fruits in daytime and nighttime light-supplement environments. Comput. Electron. Agric. 2024, 220, 108914. [Google Scholar] [CrossRef]
- Bello, R.W.; Oladipo, M.A. Mask YOLOv7-based drone vision system for automated cattle detection and counting. Artif. Intell. Appl. 2024, 2, 129–139. [Google Scholar] [CrossRef]
- Broadley, M.; Escobar-Gutierrez, A.; Burns, A.; Burns, I. What are the effects of nitrogen deficiency on growth components of lettuce? New Phytol. 2000, 147, 519–526. [Google Scholar] [CrossRef]
- Yang, R.; Wu, Z.; Fang, W.; Zhang, H.; Wang, W.; Fu, L.; Majeed, Y.; Li, R.; Cui, Y. Detection of abnormal hydroponic lettuce leaves based on image processing and machine learning. Inf. Process. Agric. 2023, 10, 1–10. [Google Scholar] [CrossRef]
- Gao, H.; Mao, H.; Ullah, I. Analysis of metabolomic changes in lettuce leaves under low nitrogen and phosphorus deficiencies stresses. Agriculture 2020, 10, 406. [Google Scholar] [CrossRef]
- Terven, J.; Córdova-Esparza, D.M.; Romero-González, J.A. A comprehensive review of yolo architectures in computer vision: From yolov1 to yolov8 and yolo-nas. Mach. Learn. Knowl. Extr. 2023, 5, 1680–1716. [Google Scholar] [CrossRef]
- Wang, C.Y.; Yeh, I.H.; Liao, H.Y.M. YOLOv9: Learning What You Want to Learn Using Programmable Gradient Information. arXiv 2024, arXiv:2402.13616. [Google Scholar]
- Wang, A.; Chen, H.; Liu, L.; Chen, K.; Lin, Z.; Han, J.; Ding, G. YOLOv10: Real-Time End-to-End Object Detection. arXiv 2024, arXiv:2405.14458. [Google Scholar]
- Zhang, J.; Yao, Y.; Deng, B. Fast and Robust Iterative Closest Point. IEEE Trans. Pattern Anal. Mach. Intell. 2021, 44, 3450–3466. [Google Scholar] [CrossRef]
- Anderson, D.G. Iterative procedures for nonlinear integral equations. J. ACM 1965, 12, 547–560. [Google Scholar] [CrossRef]
- González-Barbosa, J.J.; Ramírez-Pedraza, A.; Ornelas-Rodríguez, F.J.; Cordova-Esparza, D.M.; González-Barbosa, E.A. Dynamic Measurement of Portos Tomato Seedling Growth Using the Kinect 2.0 Sensor. Agriculture 2022, 12, 449. [Google Scholar] [CrossRef]
- Redmon, J.; Divvala, S.; Girshick, R.; Farhadi, A. You Only Look Once: Unified, Real-Time Object Detection. arXiv 2016, arXiv:1506.02640. [Google Scholar]
- Torres, J. YOLOv8 Architecture: A Deep Dive into its Architecture. 2024. Available online: https://yolov8.org/yolov8-architecture/ (accessed on 14 August 2024).
- Mukherjee, S. YOLOv9: Exploring Object Detection with YOLO Model. 2024. Available online: https://blog.paperspace.com/yolov9-2/ (accessed on 14 August 2024).










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test Laboratory Lettuce Rhodena | ||||
|---|---|---|---|---|
| Element | Result | Sufficiency | Unit | |
| Healthy | Diseased | |||
| Nitrogen | 4.91 | 2.05 | 4.50–5.50 | % |
| Phosphorus | 0.47 | 0.32 | 0.35–0.40 | % |
| Potassium | 6.17 | 2.75 | 6.00–7.00 | % |
| Calcium | 1.89 | 0.78 | 1.00–2.00 | % |
| Magnesium | 0.81 | 1.48 | 0.30–0.40 | % |
| Sulfur | 0.51 | 0.35 | 0.20–0.60 | % |
| Iron | 1429 | 3956 | 50.0–100 | ppm |
| Zinc | 76.20 | 27.49 | 25.0–100 | ppm |
| Manganese | 93.49 | 51.39 | 20.0–200 | ppm |
| Copper | 6.24 | 11.25 | 5.00–10.0 | ppm |
| Boron | 52.25 | 43.28 | 25.0–80.0 | ppm |
| Classifier Crop Production % | ||||||
|---|---|---|---|---|---|---|
| Stage | NCA | SGD | DTC | Linear | RBF | Poly |
| Third | 30.1 | 27.42 | 25.45 | 23.49 | 23.9 | 22.01 |
| Second | 52.13 | 48.34 | 53.98 | 53.65 | 52.12 | 53.87 |
| First | 1.87 | 2.18 | 5.81 | 2.02 | 5.95 | 5.36 |
| Fails | 4.94 | 6.54 | 5.63 | 6.03 | 4.80 | 6.08 |
| Accuracy | 89.04 | 84.48 | 90.87 | 85.19 | 86.77 | 87.32 |
| 15th day Prod. | 84.01 | 77.94 | 85.24 | 79.16 | 81.97 | 81.24 |
| Detector | Model | Precision | Recall | mAP50 |
|---|---|---|---|---|
| YOLOv8 | n | 0.750 | 0.701 | 0.736 |
| s | 0.633 | 0.782 | 0.747 | |
| m | 0.788 | 0.658 | 0.729 | |
| 0.786 | 0.658 | 0.713 | ||
| x | 0.627 | 0.765 | 0.737 | |
| YOLOv9 | t | 0.670 | 0.792 | 0.772 |
| s | 0.702 | 0.778 | 0.784 | |
| m | 0.653 | 0.798 | 0.783 | |
| c | 0.701 | 0.79 | 0.792 | |
| e | 0.66 | 0.792 | 0.784 | |
| YOLOv10 | n | 0.739 | 0.703 | 0.716 |
| s | 0.731 | 0.730 | 0.740 | |
| m | 0.800 | 0.639 | 0.740 | |
| b | 0.775 | 0.657 | 0.715 | |
| l | 0.679 | 0.752 | 0.750 | |
| x | 0.764 | 0.687 | 0.726 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ramírez-Pedraza, A.; Salazar-Colores, S.; Terven, J.; Romero-González, J.-A.; González-Barbosa, J.-J.; Córdova-Esparza, D.-M. Nutritional Monitoring of Rhodena Lettuce via Neural Networks and Point Cloud Analysis. AgriEngineering 2024, 6, 3474-3493. https://doi.org/10.3390/agriengineering6030198
Ramírez-Pedraza A, Salazar-Colores S, Terven J, Romero-González J-A, González-Barbosa J-J, Córdova-Esparza D-M. Nutritional Monitoring of Rhodena Lettuce via Neural Networks and Point Cloud Analysis. AgriEngineering. 2024; 6(3):3474-3493. https://doi.org/10.3390/agriengineering6030198
Chicago/Turabian StyleRamírez-Pedraza, Alfonso, Sebastián Salazar-Colores, Juan Terven, Julio-Alejandro Romero-González, José-Joel González-Barbosa, and Diana-Margarita Córdova-Esparza. 2024. "Nutritional Monitoring of Rhodena Lettuce via Neural Networks and Point Cloud Analysis" AgriEngineering 6, no. 3: 3474-3493. https://doi.org/10.3390/agriengineering6030198