


RGB Composition Obtained by a UAV in the Monitoring of Sugarcane Row Gaps Using the Biophysical Index

 , , ,
, , ,  ,
,  ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Area
2.2. Manual Analysis of Planting and Regrowth Gaps
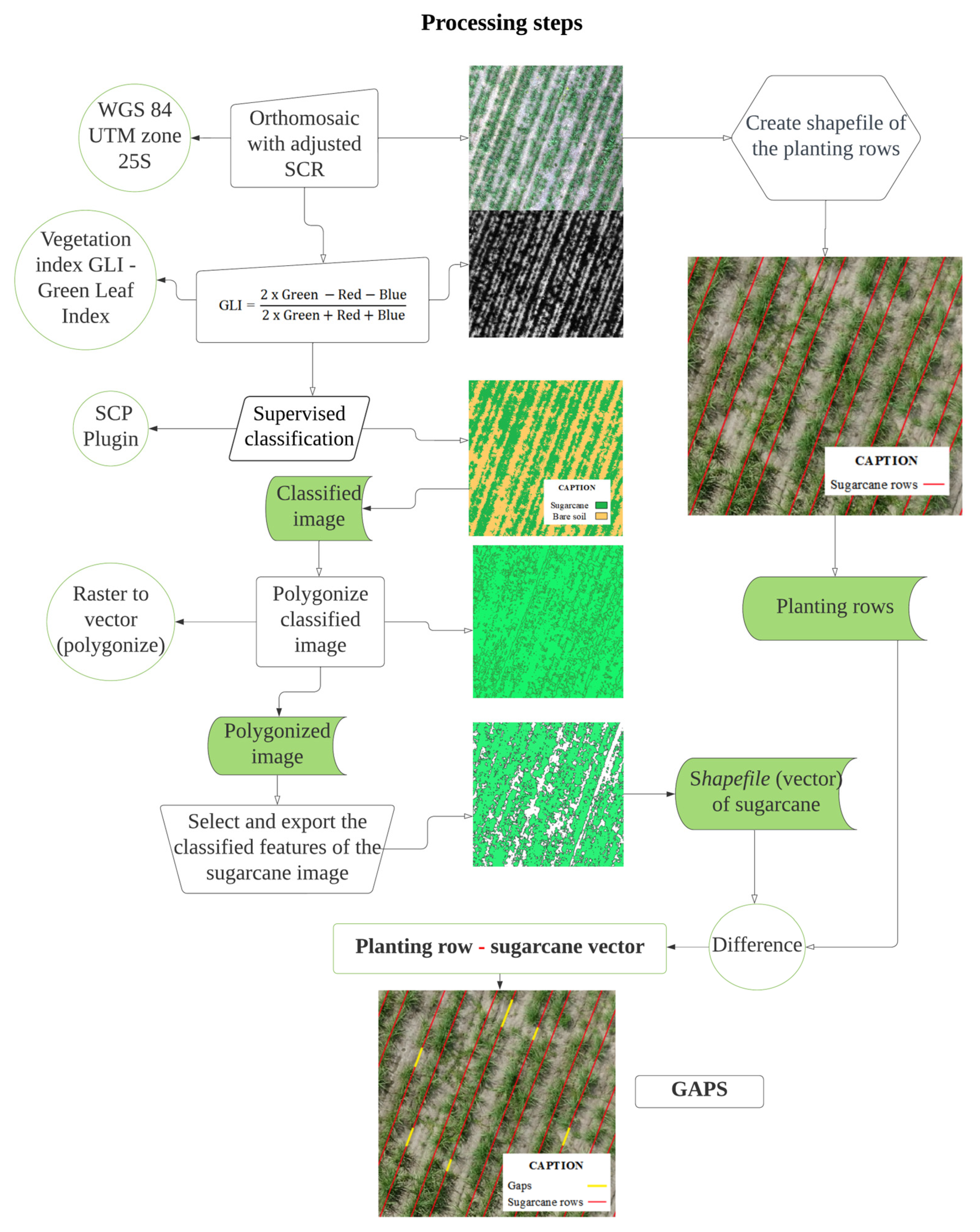
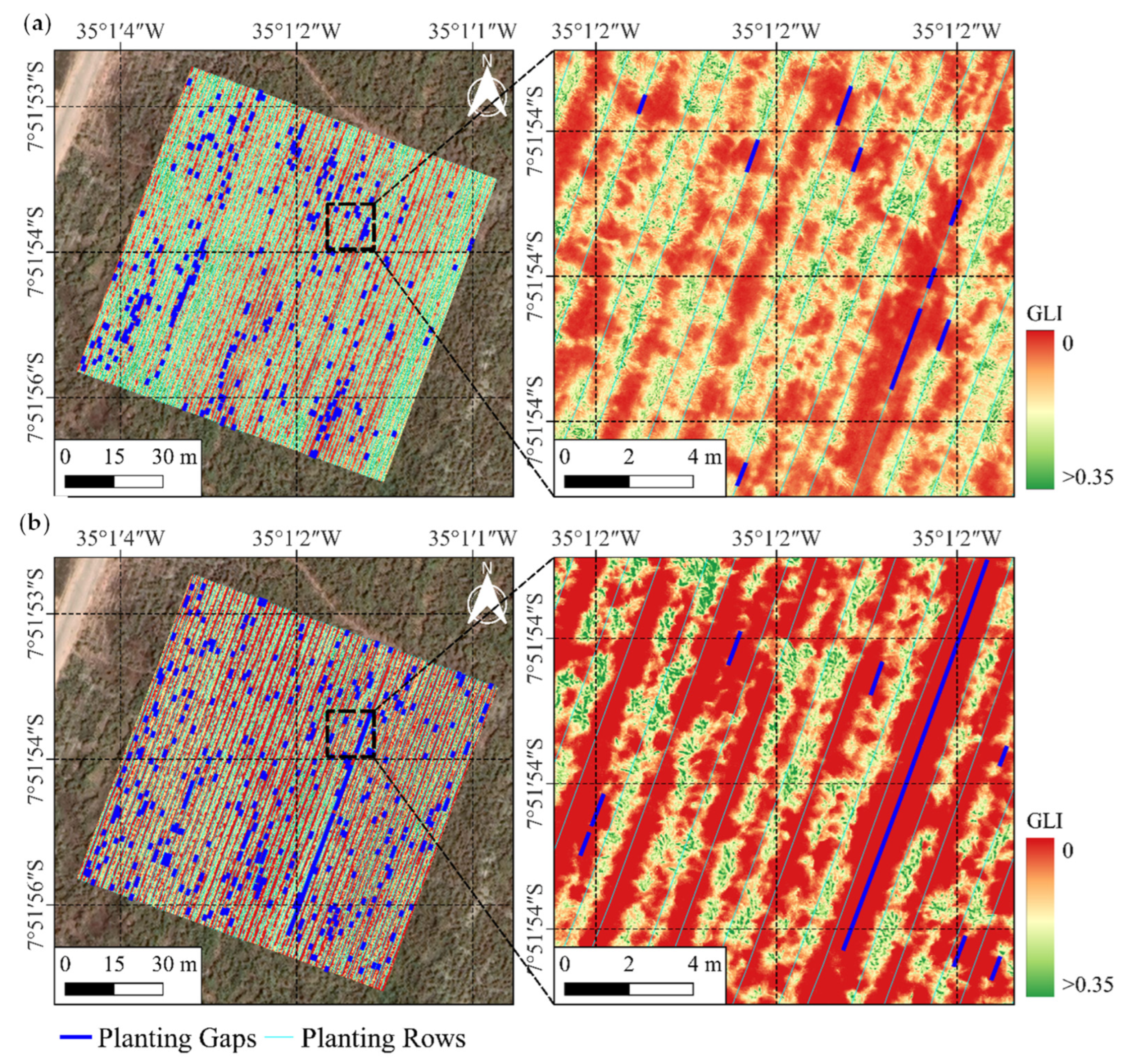
2.3. Analysis of Gaps via Unmanned Aerial Vehicle (UAV)
2.4. Statistical Analysis
3. Results
3.1. Comparison of Row Gap Number: Field Measurement vs. UAV Estimation
3.2. Assessment of Total Length per Class: Field Measurement vs. UAV Estimation
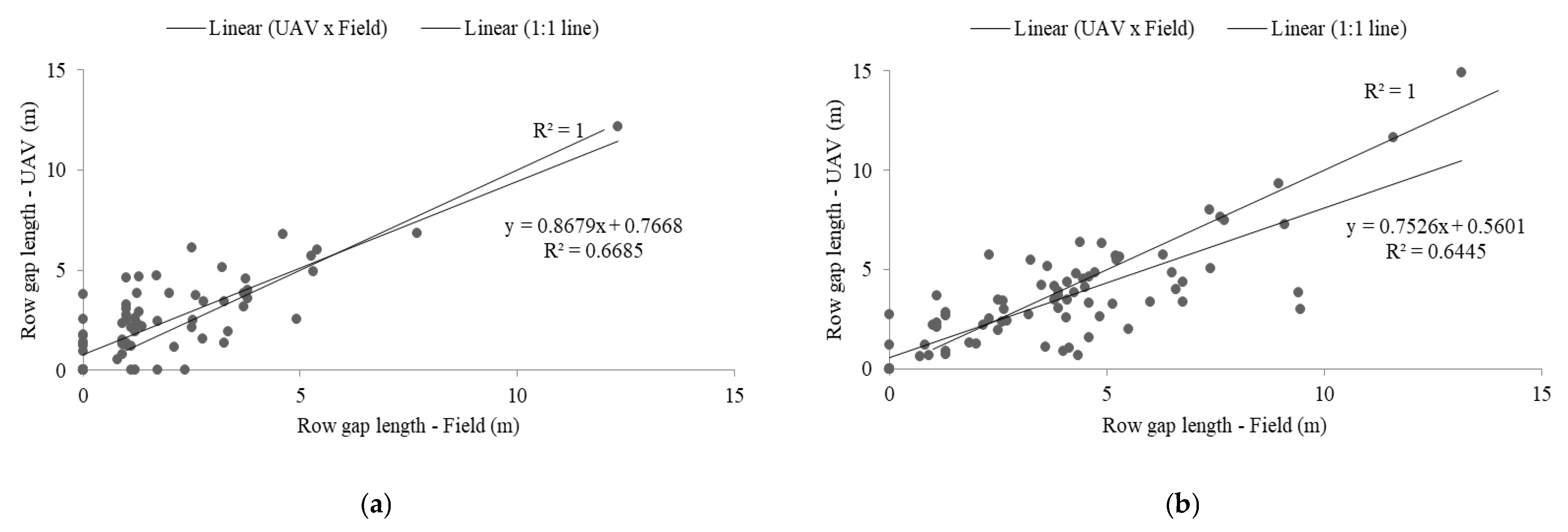
3.3. Validation of Aerial Image Method
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Karp, S.G.; Medina, J.D.; Letti, L.A.; Woiciechowski, A.L.; de Carvalho, J.C.; Schmitt, C.C.; Soccol, C.R. Bioeconomy and biofuels: The case of sugarcane ethanol in Brazil. Biofuel Bioprod. Biorefin. 2021, 15, 899–912. [Google Scholar] [CrossRef]
- Vandenberghe, L.P.S.; Valladares-Diestra, K.K.; Bittencourt, G.A.; Torres, L.Z.; Vieira, S.; Karp, S.G.; Soccol, C.R. Beyond sugar and ethanol: The future of sugarcane biorefineries in Brazil. Renew. Sustain. Energy Rev. 2022, 167, 112721. [Google Scholar] [CrossRef]
- Conab—Companhia Nacional de Abastecimento. Acompanhamento da Safra Brasileira de Cana-de-Açúcar, v. 12-Safra 2024/25, n. 2, Segundo Levantamento, Brasília. 2024. Available online: https://www.conab.gov.br/info-agro/safras/cana (accessed on 10 November 2024).
- Maldaner, L.F.; Corrêdo, L.P.; Canata, T.F.; Molin, J.P. Predicting the sugarcane yield in real-time by harvester engine parameters and machine learning approaches. Comput. Electron. Agric. 2021, 181, 105945. [Google Scholar] [CrossRef]
- Valente, F.; Laurini, M. Pre-harvest sugarcane burning: A statistical analysis of the environmental impacts of a regulatory change in the energy sector. Clean. Eng. Technol. 2021, 4, 100255. [Google Scholar] [CrossRef]
- Bordonal, R.D.O.; Carvalho, J.L.N.; Lal, R.; de Figueiredo, E.B.; de Oliveira, B.G.; La Scala, N. Sustainability of sugarcane production in Brazil. A review. Agron. Sustain. Dev. 2018, 38, 13. [Google Scholar] [CrossRef]
- Cortez, J.W.; Missio, C.; Barreto, A.K.G.; Silva, M.D.; Reis, G.N. Quality of sugarcane mechanized planting. Rev. Eng. Agríc. 2016, 36, 1136–1144. [Google Scholar] [CrossRef]
- Santoro, E.; Soler, E.M.; Cherri, A.C. Route optimization in mechanized sugarcane harvesting. Comput. Electron. Agric. 2017, 141, 140–146. [Google Scholar] [CrossRef]
- Du, C.; Kulay, L.; Cavalett, O.; Dias, L.; Freire, F. Life cycle assessment addressing health effects of particulate matter of mechanical versus manual sugarcane harvesting in Brazil. Int. J. Life Cycle Assess. 2018, 23, 787–799. [Google Scholar] [CrossRef]
- Silva, M.J.; Neves, L.O.; Correa, M.H.F.; de Souza, C.H.W. Quality indexes and performance in mechanized harvesting of sugarcane at a burnt cane and green cane. Sugar Tech 2021, 23, 499–507. [Google Scholar] [CrossRef]
- Pacheco, E.P.; Cantalice, J.R.B. Compressibilidade, resistência à penetração e intervalo hídrico ótimo de um Argissolo Amarelo cultivado com cana-de-açúcar nos Tabuleiros Costeiros de Alagoas. Rev. Bras. Ciência Solo 2011, 35, 403–415. [Google Scholar] [CrossRef]
- Castioni, G.A.; Cherubin, M.R.; Menandro, L.M.S.; Sanches, G.M.; Bordonal, R.O.; Barbosa, L.C.; Franco, H.C.J.; Carvalho, J.L.N. Soil physical quality response to sugarcane straw removal in Brazil: A multi-approach assessment. Soil Tillage Res. 2018, 184, 301–309. [Google Scholar] [CrossRef]
- Stolf, R. Metodologia de avaliação de falhas nas linhas de cana-de-açúcar. STAB 1986, 4, 22–36. [Google Scholar]
- Luna, I.; Lobo, A. Mapping Crop Planting Quality in Sugarcane from UAV Imagery: A Pilot Study in Nicaragua. Remote Sens. 2016, 8, 500. [Google Scholar] [CrossRef]
- Souza, C.H.W.; Lamparelli, R.A.C.; Rocha, J.V.; Magalhães, P.S.G. Mapping skips in sugarcane fields using object-based analysis of unmanned aerial vehicle (UAV) images. Comput. Electron. Agric. 2017, 143, 49–56. [Google Scholar] [CrossRef]
- Dhariwal, S.; Sharma, A. Aerial Images were used to Detect Curved-Crop Rows and Failures in Sugarcane Production. In Proceedings of the IEEE International Conference on Electronics, Computing and Communication Technologies (CONECCT), Bangalore, India, 8–10 July 2022; pp. 1–7. [Google Scholar] [CrossRef]
- Cardoso, L.A.S.; Farias, P.R.S.; Soares, J.A.C. Use of Unmanned Aerial Vehicle in Sugarcane Cultivation in Brazil: A Review. Sugar Tech 2022, 24, 1636–1648. [Google Scholar] [CrossRef]
- Barbosa Júnior, M.R.; Tedesco, D.; Corrêa, R.G.; Moreira, B.R.A.; Silva, R.P.; Zerbato, C. Mapping Gaps in Sugarcane by UAV RGB Imagery: The Lower and Earlier the Flight, the More Accurate. Agronomy 2021, 11, 2578. [Google Scholar] [CrossRef]
- Molin, J.P.; Veiga, J.P.S.; Cavalcante, D.S. Spatial variability of sugarcane row gaps: Measurement and Measuring and mapping sugarcane gaps. Ciênc. Agrotec. 2016, 40, 347–355. [Google Scholar] [CrossRef]
- Oliveira, M.P.D.; Cardoso, P.H.; Oliveira, R.P.D.; Barbosa Júnior, M.R.; da Silva, R.P. Mapping gaps in sugarcane fields using UAV-RTK platform. Agriculture 2023, 13, 1241. [Google Scholar] [CrossRef]
- Santos, S.G.; Melo, J.C.; Constantino, R.G.; Brito, A.V. A solution for vegetation analysis, separation and geolocation of management zones using aerial images by UAVs. In Proceedings of the 2019 IX Brazilian Symposium on Computing Systems Engineering (SBESC), Natal, Brazil, 19–22 November 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Rocha, B.M.; da Fonseca, A.U.; Pedrini, H.; Soares, F. Automatic detection and evaluation of sugarcane planting rows in aerial images. Inf. Process. Agric. 2023, 10, 400–425. [Google Scholar] [CrossRef]
- Huang, C.Y.; Wei, H.L.; Rau, J.Y.; Jhan, J.P. Use of principal components of UAV-acquired narrow-band multispectral imagery to map the diverse low stature vegetation fAPAR. GISci. Remote Sens. 2019, 56, 605–623. [Google Scholar] [CrossRef]
- Wang, N.; Suomalainen, J.; Bartholomeus, H.; Kooistra, L.; Masiliūnas, D.; Clevers, J.G. Diurnal variation of sun-induced chlorophyll fluorescence of agricultural crops observed from a point-based spectrometer on a UAV. Int. J. Appl. Earth Obs. Geoinf. 2021, 96, 102276. [Google Scholar] [CrossRef]
- Ganeva, D.; Roumenina, E.; Dimitrov, P.; Gikov, A.; Jelev, G.; Dragov, R.; Taneva, K. Phenotypic traits estimation and preliminary yield assessment in different phenophases of wheat breeding experiment based on UAV multispectral images. Remote Sens. 2022, 14, 1019. [Google Scholar] [CrossRef]
- Rueda-Ayala, V.P.; Peña, J.M.; Höglind, M.; Bengochea-Guevara, J.M.; Andújar, D. Comparing UAV-based technologies and RGB-D reconstruction methods for plant height and biomass monitoring on grass ley. Sensors 2019, 19, 535. [Google Scholar] [CrossRef] [PubMed]
- Sumesh, K.C.; Ninsawat, S.; Som-ard, J. Integration of RGB-based vegetation index, crop surface model and object-based image analysis approach for sugarcane yield estimation using unmanned aerial vehicle. Comput. Electron. Agric. 2021, 180, 105903. [Google Scholar] [CrossRef]
- Castro-Valdecantos, P.; Apolo-Apolo, O.E.; Pérez-Ruiz, M.; Egea, G. Leaf area index estimations by deep learning models using RGB images and data fusion in maize. Precis. Agric. 2022, 23, 1949–1966. [Google Scholar] [CrossRef]
- Soil Survey Staff. Keys to Soil Taxonomy, 12th ed.; NRCS: Washington, DC, USA, 2018. Available online: https://www.nrcs.usda.gov/sites/default/files/2022-09/The-Soil-Survey-Manual.pdf (accessed on 27 July 2023).
- Alvares, C.A.; Stape, J.L.; Sentelhas, P.C.; Gonçalves, J.D.M.; Sparovek, G. Köppen’s climate classification map for Brazil. Meteorol. Z. 2013, 22, 711–728. [Google Scholar] [CrossRef]
- INMET. Instituto Nacional de Meteorologia. Dados Históricos Anuais. Available online: https://portal.inmet.gov.br/dadoshistoricos (accessed on 2 February 2023).
- Ortiz, P.F.S.; Rolim, M.M.; Lima, R.P.; Tormena, C.A.; Cavalcanti, R.Q.; Pedrosa, E.M.R. A Soil Physical Assessment Over Three Successive Burned and Unburned Sugarcane Annual Harvests. Sugar Tech 2022, 25, 518–530. [Google Scholar] [CrossRef]
- Burdziakowski, P.; Specht, C.; Dabrowski, P.S.; Specht, M.; Lewicka, O.; Makar, A. Using UAV Photogrammetry to Analyse Changes in the Coastal Zone Based on the Sopot Tombolo (Salient) Measurement Project. Sensors 2020, 20, 4000. [Google Scholar] [CrossRef]
- Stateczny, A.; Kazimierski, W.; Burdziakowski, P.; Motyl, W.; Wisniewska, M. Shore Construction Detection by Automotive Radar for the Needs of Autonomous Surface Vehicle Navigation. ISPRS Int. J. Geo-Inf. 2019, 8, 80. [Google Scholar] [CrossRef]
- Louhaichi, M.; Borman, M.M.; Johnson, D.E. Spatially located platform and aerial photography for documentation of grazing impacts on wheat. Geocarto Int. 2001, 16, 65–70. [Google Scholar] [CrossRef]
- Congedo, L. Semi-Automatic Classification Plugin for QGIS; Sapienza University: Rome, Italy, 2013. [Google Scholar]
- R Core Team. R: A Language and Environment for Statistical Computing; R Foundation for Statistical Computing: Vienna, Austria, 2021; Available online: https://www.r-project.org (accessed on 12 September 2023).
- Toledo, A.; Silva, R.P.; Furlani, C.E.A. Quality of cut and basecutter blade configuration for the mechanized harvest of green sugarcane. Sci. Agric. J. 2013, 70, 384–389. [Google Scholar] [CrossRef]
- Bernache, L.; Oliveirpa, D.T.; Oliveira, L.P.; Corrêa, L.N.; Silva, R.P. Can basal cutting blade wear affect sugarcane regrowth? Rev. Eng. Agríc. 2020, 40, 53–60. [Google Scholar] [CrossRef]
- Qiu, M.; Meng, Y.; Li, Y.; Shen, X. Sugarcane stem cut quality investigated by finite element simulation and experiment. Biosyst. Eng. 2021, 206, 135–149. [Google Scholar] [CrossRef]
- Voltarelli, M.A.; Silva, R.P.D.; Cassia, M.T.; Daloia, J.G.M.; Paixão, C.S.S. Qualidade do corte basal de cana-de-açúcar efetuado por facas de diferentes angulações e revestimentos. Rev. Ciênc. Agron. 2017, 48, 438–447. [Google Scholar] [CrossRef]
- Voltarelli, M.A.; Silva, R.P.D.; Cassia, M.T.; Ortiz, D.F.; Torres, L.S. Qualidade do corte basal de cana-de-açúcar utilizando-se de três modelos de facas. Eng. Agríc. 2015, 35, 528–541. [Google Scholar] [CrossRef]
- Manhães, C.M.C.; Francelino, F.M.A.; Araújo, R.A.; Oliveira, D.G.; Francelino, H.O.; Silva, M.P.S.; Santos, A.S.; Moura Júnior, M.D. Visible Losses to the Mechanical Harvesting of Ratoon Sugarcane Using the Harvester John Deere 3520. Am. J. Anal. Chem. 2018, 9, 580–590. [Google Scholar] [CrossRef]
- Braunack, M.V.; Arvidsson, J.; Hakansson, I. Effect of harvest traffic position on soil conditions, and sugarcane (Saccharum officinarum) response to environmental conditions in Queensland, Australia. Soil Tillage Res. 2006, 89, 103–121. [Google Scholar] [CrossRef]
- Manhães, C.M.C.; Garcia, R.F.; Junior, D.C.; Francelino, F.M.A.; Francelino, H.O.; Santos, C.M.F.G. Evaluation of visible losses and damage to the ratoon cane in the mechanized harvesting of sugarcane for different displacement speeds. Am. J. Plant Sci. 2014, 5, 2956–2964. [Google Scholar] [CrossRef]
- Hu, P.; Guo, W.; Chapman, S.C.; Guo, Y.; Zheng, B. Pixel size of aerial imagery constrains the applications of unmanned aerial vehicle in crop breeding. ISPRS J. Photogramm. Remote Sens. 2019, 154, 1–9. [Google Scholar] [CrossRef]
- Santana, C.H.G.; Silva, A.L. Identificação de Falhas de Plantio em Lavoura de Cana-de-Açúcar em Diferentes Alturas com Uso de Vant, R.C.E.A. 2021, Volume 40, p. 1. Available online: https://faef.revista.inf.br/imagens_arquivos/arquivos_destaque/6STaT7PI0jAX1gb_2021-12-21-15-7-39.pdf (accessed on 18 December 2024).
- Ranđelović, P.; Đorđević, V.; Milić, S.; Balešević-Tubić, S.; Petrović, K.; Miladinović, J.; Đukić, V. Prediction of Soybean Plant Density Using a Machine Learning Model and Vegetation Indices Extracted from RGB Images Taken with a UAV. Agronomy 2020, 10, 1108. [Google Scholar] [CrossRef]
- Bocca, F.F.; Rodrigues, L.H.A.; Arraes, N.A.M. When do I want to know and why? Different demands on sugarcane yield predictions. Agric. Syst. 2015, 135, 48–56. [Google Scholar] [CrossRef]
- Matsuoka, S.; Stolf, R. Sugarcane Tillering and Ratooning: Key Factors for a Profitable Cropping. In Sugarcane: Production, Cultivation and Uses; Nova Publishers: Hauppauge, NY, USA, 2012; pp. 138–157. ISBN 9781612097459. [Google Scholar]
- Maldaner, L.F.; Molin, J.P.; Martello, M.; Tavares, T.R.; Dias, F.L. Identification and measurement of gaps within sugarcane rows for site-specific management: Comparing different sensor-based approaches. Biosyst. Eng. 2021, 209, 64–73. [Google Scholar] [CrossRef]
- Keerthipala, A.P.; Dharmawardene, N. Determination of optimal replanting cycles for sugarcane production in Sri Lanka. Sugar Tech 2000, 2, 9–19. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Technical Data | DJI Mavic Pro |
|---|---|
| Dimensions (L × W × H) (mm) | 305 × 244 × 85 |
| Weight (g) | 734 |
| Maximum rising speed (m/s) | 5 |
| Maximum ascending velocity (m/s) | 3 |
| Maximum advance velocity (km/h) | 65 |
| Maximum altitude (m) | 5000 |
| Maximum flight time (min) | 27 |
| Maximum hovering time (min) | 24 |
| Mean flight time (min) | 21 |
| Maximum flight range (km) | 13 |
| Permissible operating temperature range (°C) | 0 to 40 |
| Satellite Navigation Systems | GPS/GLONASS |
| Technical Data | FC220 |
|---|---|
| Sensor size | 1/2.3″ (6.16 mm × 4.55 mm), 12.35 MP |
| Pixel size | 1.55 μm |
| Lens (field of view, FOV) | 78.8° (f/2.2) |
| Image size | 4000 × 3000 pixels |
| Focal length | 4.74 mm |
| Focal length (35 mm equivalent) | 27.64 mm |
| Principal point X, Y | 1974.82 pixels, 1491.48 pixels |
| Distortion coefficients: K1, K2, K3, P1, P2 | −0.001, 0.0325, −0.046, 0, 0 |
| Focus | From 0.5 m to ∞, auto/manual focus |
| ISO range | 100–3200 (video), 100–1600 (photographs) |
| Electronic shutter speed | 8–1/8000 s |
| Photographic file format | JPEG, DNG |
| 2017/2018 | |
|---|---|
| Flight path | single grid |
| Ground sampling distance (GSD) | 2.21 |
| Number of photos taken | - |
| Coverage (longitudinal/traverse) (%) | 80/75 |
| Flight altitude above ground level (AGL) | 60 |
| Factors | DF | SS | MS | F | p-Value |
|---|---|---|---|---|---|
| Regression | 1 | 255.44 | 255.44 | 161.33 | 4.0521 × 10−5 |
| Residual | 80 | 126.67 | 1.58 | 7.12701 × 10−21 | |
| Total | 81 | 382.10 |
| Factors | DF | SS | MS | F | p-Value |
|---|---|---|---|---|---|
| Regression | 1 | 359.11 | 359.11 | 141.39 | 0.06647 |
| Residual | 78 | 198.11 | 2.54 | 3.40018 × 10−19 | |
| Total | 79 | 557.22 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Melo, C.G.B.d.; Rolim, M.M.; Cavalcanti, R.Q.; Silva, M.V.d.; Candeias, A.L.B.; Lopes, P.M.O.; Ortiz, P.F.S.; Lima, R.P.d. RGB Composition Obtained by a UAV in the Monitoring of Sugarcane Row Gaps Using the Biophysical Index. AgriEngineering 2025, 7, 17. https://doi.org/10.3390/agriengineering7010017
Melo CGBd, Rolim MM, Cavalcanti RQ, Silva MVd, Candeias ALB, Lopes PMO, Ortiz PFS, Lima RPd. RGB Composition Obtained by a UAV in the Monitoring of Sugarcane Row Gaps Using the Biophysical Index. AgriEngineering. 2025; 7(1):17. https://doi.org/10.3390/agriengineering7010017
Chicago/Turabian StyleMelo, Camila G. B. de, Mário M. Rolim, Roberta Q. Cavalcanti, Marcos V. da Silva, Ana Lúcia B. Candeias, Pabrício M. O. Lopes, Pedro F. S. Ortiz, and Renato P. de Lima. 2025. "RGB Composition Obtained by a UAV in the Monitoring of Sugarcane Row Gaps Using the Biophysical Index" AgriEngineering 7, no. 1: 17. https://doi.org/10.3390/agriengineering7010017
APA StyleMelo, C. G. B. d., Rolim, M. M., Cavalcanti, R. Q., Silva, M. V. d., Candeias, A. L. B., Lopes, P. M. O., Ortiz, P. F. S., & Lima, R. P. d. (2025). RGB Composition Obtained by a UAV in the Monitoring of Sugarcane Row Gaps Using the Biophysical Index. AgriEngineering, 7(1), 17. https://doi.org/10.3390/agriengineering7010017