Abstract
Since electric power steering has replaced hydraulic power steering in passenger cars, steering feedback has become a challenging task in steering system development. Test benches represent a valid approach for improving steering feedback since they allow investigations without the real vehicle. To improve the applicability of feedback evaluations on a steering test bench, this paper aims to identify improvements in the current evaluation technique to obtain objective parameters that correlate with a subjective evaluation of safety-relevant steering feedback. Therefore, a previously reported approach of a chirp rack force excitation, using the magnitude of the transfer function from the rack force to steering wheel torque to describe steering feedback, is compared to a similar identification approach in which a pseudo-random-binary-sequence signal is utilized. To reflect realistic applications, driving maneuvers are transferred to the test bench to identify relevant objective data. For a valid representation of the steering wheel operation, a human grip model is implemented and compared to a fixed steering wheel angle control. It is shown that the random signal represents a valid and, on average, improved approach to objectively evaluating the steering feedback. Furthermore, a recommendation can be made to include the human grip model in the feedback evaluation tests, as the identified correlation results are improved by its inclusion. The identified parameters and methods represent an improvement for future steering feedback development.
1. Introduction
In modern passenger vehicles, electric power steering (EPS) systems equipped with an electric servo motor have replaced hydraulic power steering (HPS) systems. The major advantage of EPS is its power-on-demand principle, which successfully reduces the required energy during driving and leads to a reduction in fuel consumption of up to 0.8 l/100 km [1]. One disadvantage of EPS compared to its predecessor is the reduced feedback performance [2]. According to [1], steering feedback describes the transmission of changes in the wheel load, rolling resistance, and lateral tire forces to the driver by a variation in the steering torque. To maintain a comfortable steering torque level for the driver during parking maneuvers, large assistance forces from the servo motor are required. For EPS with a servo motor mounted axle parallel to the steering rack (apa), the servo torque is increased by two transmission stages, namely, a belt drive and a ball screw gear, to provide adequate assistance forces on the steering rack [1]. Due to the large overall transmission ratio between the servo motor and the steering rack, the equivalent translational inertia of the EPS rotor is approximately 1500 kg [3]. In the calculation of the equivalent translational inertia, equations for the kinetic energy in the motor and ball nut are expressed in a rotational formulation as well as with an equivalent translational mass at the rack. Here, the transmission ratios are utilized to express the rotational speed of the two components as translational speed at the rack. As a consequence, a total equivalent translational mass consisting of rack inertia, equivalent motor inertia, and equivalent ball nut inertia is derived [4]. This high inertia is responsible for the low-pass characteristics of the EPS and, consequently, for the reduced steering feedback. Since the steering feedback contains safety-relevant information on the current tire–road contact, its improvement represents an important topic to support the driver in his driving task.
The investigation of steering system feedback behavior can be conducted by different methods. Subjective evaluation within a real vehicle represents the most meaningful and realistic approach. Within the automotive development process, this evaluation technique is performed by professional drivers with a good understanding of the manufacturer’s goals [5]. Although subjective judgment represents the most reliable tool for feedback evaluation, real vehicles, package space, and operational steering systems are necessary. This hinders its applicability in the early stages of the development process, motivating the development of alternative approaches. Together with the verbal and descriptive nature of subjective assessments, methods for the objective evaluation of steering feedback represent an important topic.
Objective, vehicle-based investigations on the feedback behavior of steering systems with the derivation of correlating objective parameters were exemplarily performed in [3,6]. Here, primary changes in the road friction and the influence of understeer situations on the steering wheel torque were examined. The authors of [7] analyzed a road friction change maneuver as an example of useful dynamic steering feedback and a single obstacle excitation as disturbing feedback. Based on the ideal time delay between the excitation at the steering rack and the occurrence at the steering wheel (50 ms–150 ms), the cutoff frequency of a Butterworth filter was identified, which approximated the transfer function of the steering system. The findings allowed the description of the objective feedback performance of a steering system in the frequency domain [7].
Future steering system technologies like Steer-by-Wire (SbW), where the mechanical link between the driver and the steering gear is replaced by an electrical connection, are not available for immediate evaluations in vehicle prototypes during the early stages of the development process. At this point, a system failure would make it impossible to steer the vehicle. Consequently, methods without the need for vehicle prototypes must be deployed to maintain the safety claims.
One approach, which is applicable in the earliest stage of the development process, is represented by model-based investigations. For feedback evaluations, Ref. [4] identified a model with two degrees of freedom to imitate a passive steering system subjected to feedback excitations. Another model, which incorporates the steering system control unit, therefore allowing the evaluation of active steering systems, was introduced and validated in [8]. For the investigation of the whole path from the tire to the steering wheel, Ref. [9] developed a simulation model and performed multiple variations on steering system parameters to investigate their influence on the complete transfer function. Disadvantageous for model-based approaches is the complex and nonlinear behavior of the steering system, incorporating backlash, friction, and software functionality. Furthermore, mechanical insufficiencies of the real steering gear, exemplarily occurring from manufacturing inaccuracies, are difficult to model or simply neglected, complicating its applicability for the evaluation of real-world systems.
A compromise between vehicular and model-based investigations is provided by test-bench-based approaches. These applications incorporate the real steering gear within the setup and utilize a residual bus simulation and a vehicle dynamics model to mimic the surrounding conditions. Reported experiments on the feedback evaluation of steering systems use harmonic rack force excitation signals to stimulate the tie rods or the rack of the steering system. Then, a Fast Fourier Transformation (FFT) is performed to estimate the magnitude of the transfer function from the rack force to the measured steering wheel torque [4,10]. These reported experiments differentiate between the fixation of the steering wheel, which is either freely swinging or clamped [4,10]. Since the influence of a driver holding the steering wheel on the feedback behavior of steering systems was demonstrated by simulations in [11] and on a test bench in [12], this simplification represents a shortcoming for detailed investigations. Additionally, since the steering system is nonlinear, the boundary conditions strongly influence the transfer behavior of the steering system [12]. Therefore, on-center feedback evaluations, as described in the reported experiments, are not transferable for cornering situations where both a steering wheel angle and a rack preload influence the system. Due to the nonlinearity, the characteristics of the excitation signal need to be investigated, too. While sine-sweep signals with distinct frequencies and amplitudes represent a valid approach for system identification [13], real-world tie rod forces are described by a superposition of different frequencies and force amplitudes, as can be exemplarily displayed within a power spectral density plot in [8]. The extend of this influence on the resulting feedback performance has not yet been studied.
An advantage of the steering test bench application is the presence of the real steering gear and real control unit. Consequently, mechanical insufficiencies and other shortcomings are present and can be identified. Although these methods are available prior to vehicle-based applications, they are accessible later than model-based approaches since a real steering gear is necessary.
The aim of this article is the expansion of objective methods to investigate the feedback behavior of steering systems outside the vehicle. Due to the presence of a real steering system with its control unit and mechanical characteristics, a steering system test bench is selected. As a consequence of the described shortcomings of reported evaluations, the state-of-the-art method, represented as a sine-sweep-based transfer function identification approach [4,10], is utilized as the benchmark and investigated for correlations with the subjective evaluation of the steering feedback by a professional driver. Furthermore, to represent an excitation signal with a stochastic characteristic, a pseudo-random-binary sequence (PRBS) is selected to perform the identification process. Since both signals represent a generic approach for the identification of steering feedback, selected safety-relevant driving scenarios from the vehicle are transferred to the steering test bench and evaluated for objective parameters correlating with the subjective assessment. To consider the influence of the driver holding the steering wheel on the measured parameters, a human grip model is implemented. The results of both the clamped evaluation as well as the human grip model are then compared.
Identification of relevant objective feedback parameters allows an improved development of today’s steering systems. Furthermore, it represents a basis for the development of SbW systems since insecurities concerning their reliability in early stages are not relevant on the test bench. The derived information can furthermore be utilized to use the steering system as a sensor for future automated driving functions since the feedback signals provide information on the tire–road contact and can be utilized to assess the current vehicle state.
The rest of the article is structured as follows: A problem formulation and goal definition are provided in Section 2. Section 3 introduces the investigated test procedures and the human grip model, as well as the derived steering system applications. Then, in Section 4, information on the subjective and objective evaluation procedures is given. A comparison of the obtained correlations and a discussion of the results is presented in Section 5, followed by a conclusion and outlook in Section 6.
2. Problem Specification
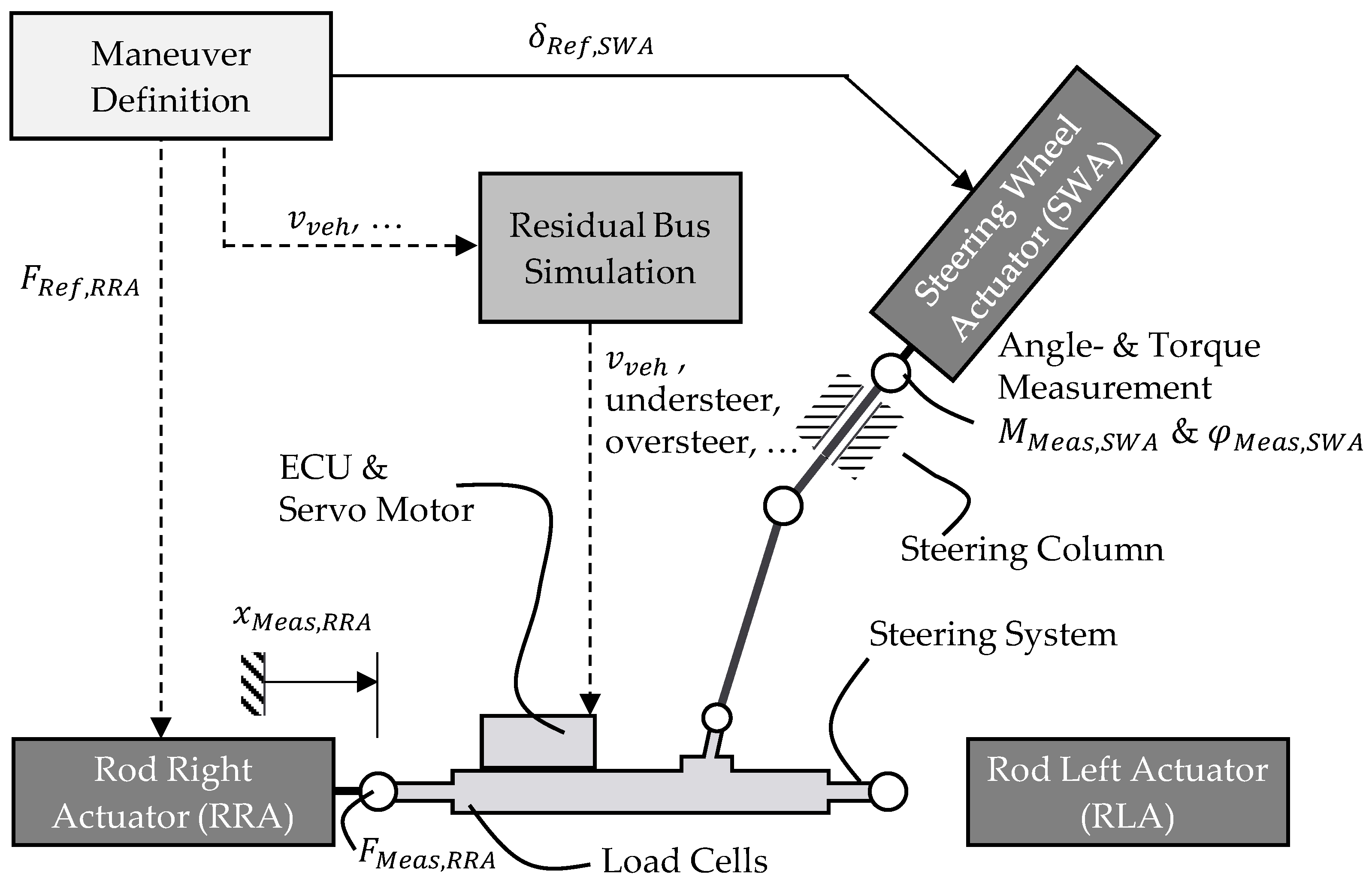
The steering system test bench considered in this paper exhibits two permanent magnet linear synchronous motors (PMLSM), which provide the excitations to the steering rack. Based on their positions relative to the steering system, they are named rod left actuator (RLA) and rod right actuator (RRA). To introduce driver inputs, a steering wheel actuator (SWA) is connected to the steering column and provides the required steering wheel angle and torque. Figure 1 displays the setup of the test bench. In addition to the described actuators, a Hardware-in-the-Loop (HiL) computer is included in the test rig to provide the control structure for the actuators, the residual bus simulation, and the maneuver definition. Here, only one of the two PMLSMs is connected to the steering system. Since the required forces do not exceed the maximum force of one PMLSM, this represents a sufficient investigation setup. Additionally, reported improvements on the test bench, like the necessary vibration reduction approach described in [14], exhibit beneficial performance if only one PMLSM is connected. Reference steering wheel angle , reference rack force and the vehicle speed are defined within the maneuver definition. For the RRA, the occurring contact forces and displacements are measured by a load cell and position sensor. A combined torque and angle sensor measures the relevant signals in proximity to the SWA. The steering system and steering column are mounted like within the real vehicle to incorporate the gimbal error caused by the universal joints between the SWA and the steering gear. Additional information on the test bench can be found in [15,16,17]. An axle-parallel EPS, meaning that the servo force is provided by an electric motor mounted parallel to the steering rack axis, is utilized for steering feedback evaluations.
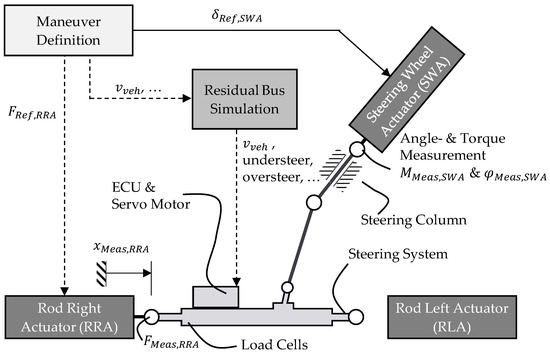
Figure 1.
Setup of the steering system test bench, cf. [15].
Reported evaluations of steering feedback on a steering system test bench focused on the usage of a sine-sweep rack force excitation signal to stimulate the steering system [4,10,15]. An FFT [13] analysis is then incorporated to receive the magnitude of the transfer function from the measured steering rack force to the steering wheel torque according to
for a frequency range from 1 Hz to 30 Hz with an input amplitude of 500 N and 600 N, as reported in [10] and [4], respectively.
Although this method represents a valid tool for the characterization of steering systems, subjective–objective correlation evaluations based on vehicle assessments have not yet been performed. This raises the question of how adequately and accurately this method is able to estimate the relevant feedback performance of a steering system and how they can be adapted or expanded.
The previously introduced simplifications of the reported approach can be summarized in the following points:
- Focus on on-center feedback and consequently neglection of boundary conditions for feedback evaluation (steering wheel angle, preload)
- Focus on distinct frequencies with constant amplitudes by a sine-sweep signal rather than superposition of different frequencies and amplitudes
- Neglection of the influence of the driver holding the steering wheel
- Generic approach without a clear connection to real-world applications.
Since an improved approximation of the real world can be regarded as a general goal, it is also connected to increased efforts like modeling or time consumption. Therefore, the goal of the conducted investigations is to analyze the impact of these simplifications on correlation results between derived objective parameters and subjective assessments from vehicle evaluations by a driver. At the same time, this expands the scope of steering test-bench-based approaches for steering feedback evaluation. The impact of the simplification is rated by a comparison of the derived correlation coefficient according to Pearson [18]
which lies within the range [−1, 1] and gives information on the extent of the characteristic , here the objective parameter, and , here the subjective score, which correlate linearly. Values larger than zero represent a positive, and values smaller than zero represent a negative correlation. Here, correlations with a Pearson coefficient larger than 0.8 are regarded as strong correlations [19], and a greater-than-0.7 correlation is regarded as valid. Parameters with an overline indicate their mean value. The magnitude of the difference is then interpreted as the relevance to incorporate the aspect within the investigation. Since the influence on boundary conditions, as mentioned in (1), was already demonstrated in [12] and can easily be incorporated, preload and steering wheel angle are always considered in the evaluation.
3. Solution Approach
For the evaluation of the impact of each simplification (2)–(4) on the correlation coefficient, different solution approaches are derived, which individually improve one aspect. The reference experiment is adopted from the previously reported setups. To validate and compare the obtained results, different steering system applications are derived.
3.1. Quasi-Stochastic Excitation
To investigate the influence of the characteristics of a generic excitation signal for transfer function estimation, a pseudo-random-binary-sequence signal is selected to replace the sine sweep excitation in the identification process. PRBS signals are well suited for system identification purposes and stimulate a wide range of frequencies [20]. In contrast to the sine sweep approach, PRBS appears similar to white noise [20] without clearly separated sine oscillations at distinct frequencies, like for the reference setup. This alternative approach allows the evaluation of steering functions for their applicability in real-world applications.
The PRBS signal here is defined by a shift register of eleven entries where positions eleven and nine are fed to an XOR operator to generate the repeating time sequence signal. For a timestep of 0.01 s, this signal exhibits a minimum frequency of 0.05 Hz and a maximum frequency of 50 Hz [13].
An alternative to PRBS excitations is the utilization of information obtained from measured rack forces, which is possible by the derivation of power-spectral densities (PSD) for different road conditions, as exemplified in [8]. This approach allows the detailed representation of the surrounding conditions occurring for the investigated vehicle, which is advantageous in comparison to PRBS signal. Still, the derived signal is only valid for the investigated vehicle and therefore not generically applicable. To allow a fair comparison to the generic approach of sweep excitation signal, PRBS is selected.
3.2. Steering Wheel Fixations
While the driver holds the steering wheel in vehicular tests, the SWA is responsible for this task on the steering system test bench. Although the influence of the human grip on the steering wheel oscillations is reported in [11], known feedback evaluation approaches solely differentiate between a freely swinging and locked steering wheel [4,10]. In the case of a freely swinging steering wheel, only on-center applications are possible since steering torque offsets, which occur during cornering, shift the steering wheel out of position. Regarding safety-relevant driving scenarios, where tire–road contact information is required to manage the driving task, which mainly occurs during cornering, this approach cannot be pursued here. The locked steering wheel reference setup is implemented by a fixed-angle control approach.
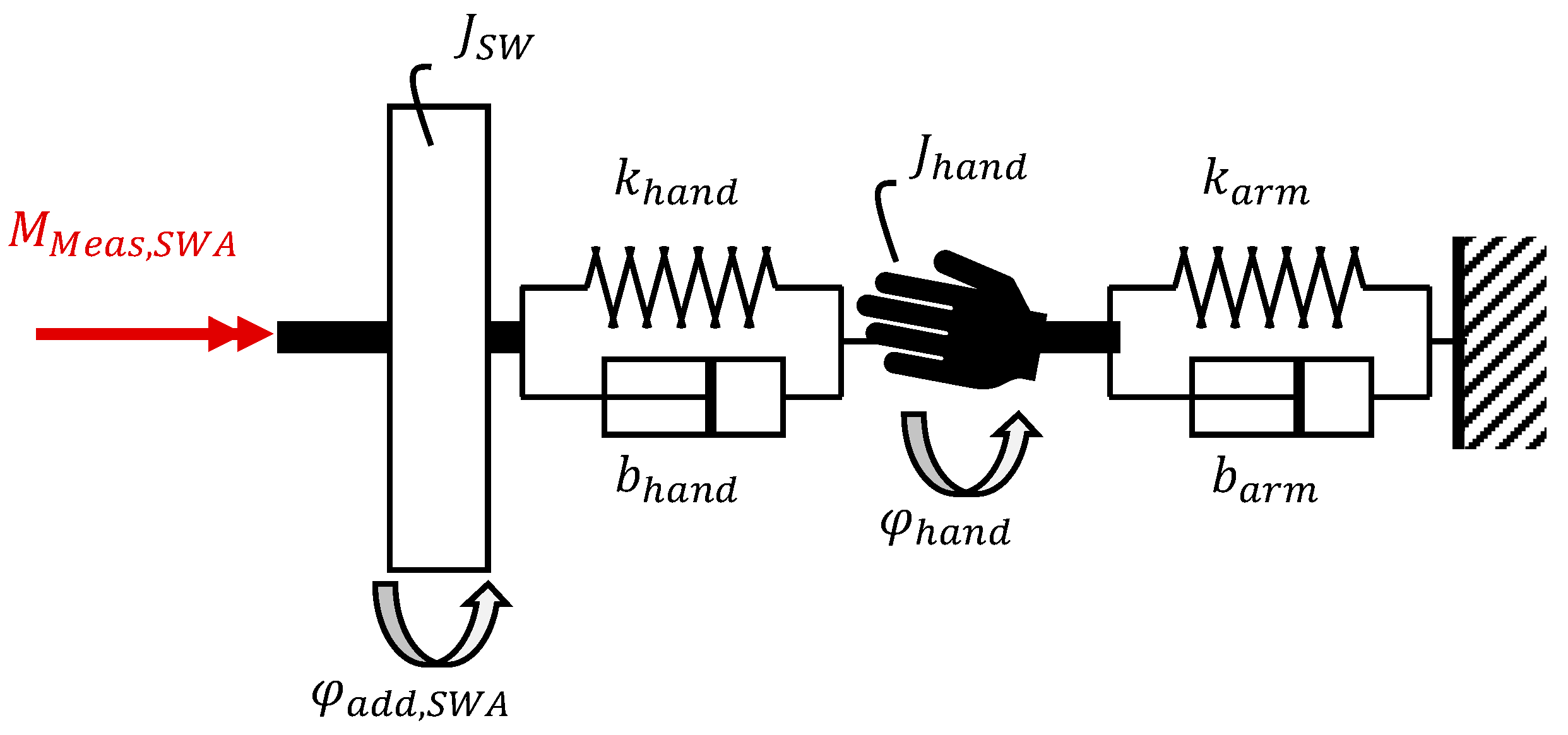
To consider the influence of a driver holding the steering wheel and allow off-center evaluation with preload, an extended approach, called the human grip model, is implemented. It is based on the findings in [21], in which a driver holding a steering wheel is adequately approximated by a single degree of freedom spring-damping system. A two-mass system was introduced in [12], which showed a better representation of the phase course at frequencies above 9 Hz, which are relevant for the herein-investigated test bench applications. Figure 2 visualizes a sketch of the model with its two degrees of freedom and the deployed damping and stiffnesses. The described human grip model was already successfully implemented on the same steering test bench in [22] to replicate a human holding the steering wheel for the evaluation of a hands-off detection algorithm.
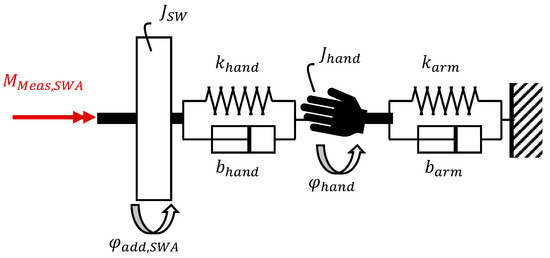
Figure 2.
Sketch of the human grip model implemented on the steering system test bench, cf. [15].
Input to the human grip model is the measured steering torque . Based on the identified values of the hand stiffness and damping , the arm stiffness and damping , and the inertia of the steering wheel and the hand, and , an additional steering wheel angle is calculated and added to the fixed reference steering wheel angle . To compensate for the latency and control dynamics of the SWA, an inverted PT1 element is implemented based on the identified characteristics of the SWA. Due to observed influences of steering torque amplitude, torque offset, and steering wheel angle on the model parameters, scaling factors are incorporated to alter the initial parameters accordingly. The scaling factors are estimated for separate variations in the excitation amplitude, offset, and steering wheel angle and are superposed based on the current situation. Detailed information on the parameterization and model validation can be found in [12].
Consequently, each considered test case is performed with the two described steering wheel fixation approaches, namely the fixed steering wheel angle control and the human grip model.
3.3. Real Driving Situations
Since previously introduced test cases represent generic approaches which, if assuming a similar level of friction, are valid for any steering system, safety-relevant driving scenarios are selected to elaborate on the merit of specifically tailored test cases in contrast to generic approaches. Similar experiments on vehicle level were performed in [6]. For the evaluation of safety-relevant feedback information, single obstacles, road structure, and wheel load reduction scenarios during cornering are investigated. The detailed scenarios and origins of the utilized vehicle data are described in Section 4.2.
3.4. Derivation of Applications
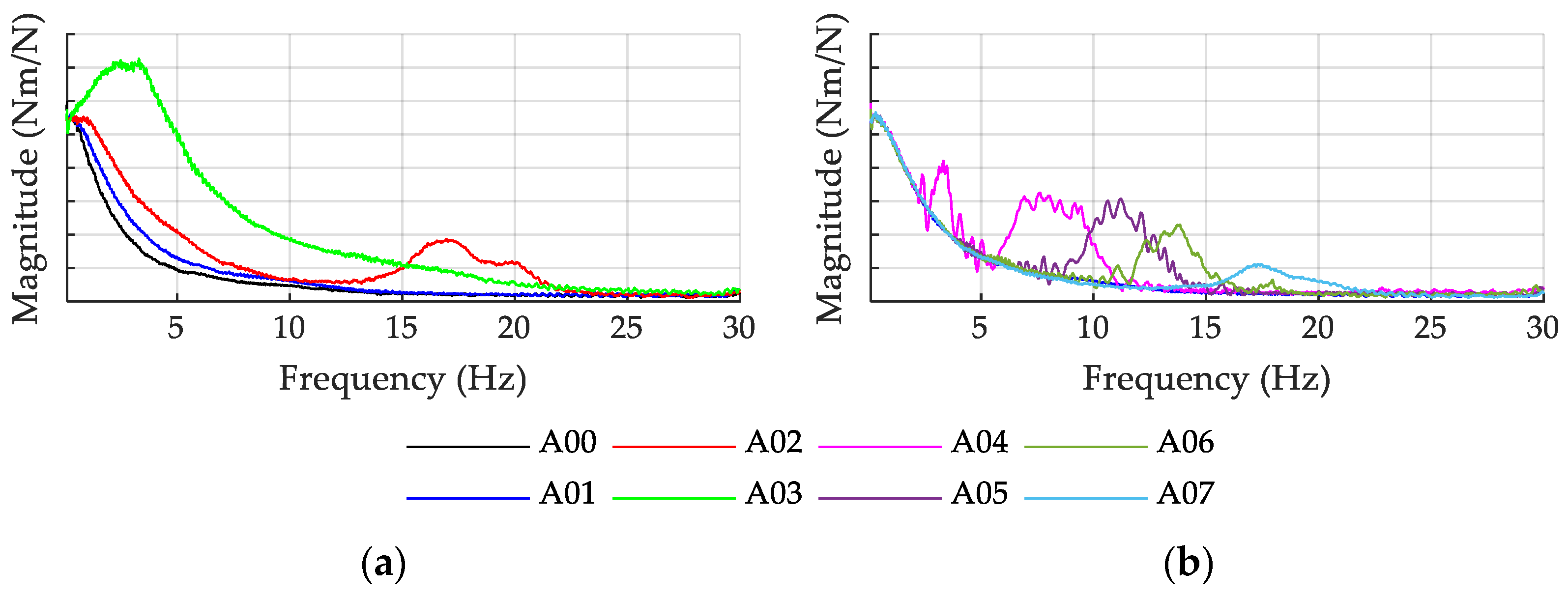
Due to the known procedures for feedback evaluations on a steering system test bench, which is used as the reference method here, the derivation of steering system applications for subjective and objective evaluation is performed with a sine-sweep reference force signal for the steering rack excitation at a fixed, zero steering wheel angle control. Here, an application describes a set of ECU parameters that are altered for the different implementations. Therefore, the differences originate solely from software functionality. The frequency range is set to 0.1 Hz to 30 Hz with an amplitude of 500 N. The aim of the applications is to create objectively distinguishable transfer function magnitudes. Figure 3 depicts the magnitude courses over the defined frequency range for all applications.
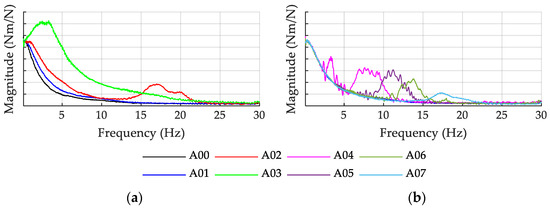
Figure 3.
Transfer function magnitude for the evaluated steering system applications with (a) change in the overall magnitude and (b) with increased magnitude in specified frequency ranges.
The distinction here is performed by two relevant approaches. First, the total magnitude of the transfer function varies in four levels by applications “A00” to “A03”; see Figure 3a. This means that based on the results of the conducted experiments, an increase in feedback magnitude in the frequency range between 0.1 Hz and 15 Hz is achieved for the applications of “A00” to “A03”, respectively. Here, the goal is to evaluate whether an increase in feedback magnitude correlates to the subjective perception of the driver. The levels are selected for “A03” to represent the maximum and “A00” the minimum in feedback magnitude. The residual levels are balanced between the boundaries. Second, displayed in Figure 3b, four distinct frequency ranges are selected to provide peaks in the transfer function magnitude. These ranges lay between 5 Hz to 10 Hz (“A04”), 8 Hz to 13 Hz (“A05”), 10 Hz to 15 Hz (“A06”) and 15 Hz to 22 Hz (“A07”). For the latter frequency range, a special software functionality is active, which improves the feedback behavior of the steering system [23,24]. The derived applications are then selected for the subjective evaluation within the real vehicle. These applications are utilized to investigate whether the detected increase in feedback magnitude is perceived by the driver. In contrast to the first four alterations (“A00” to “A03”), the increase in magnitude is limited to a narrow frequency range. Additionally, these applications are relevant to evaluate whether the sweep excitation, with clearly separated frequencies, exhibits drawbacks for the imitation of real-world applications since software functionality may operate more precisely for this synthetic excitation signal. For PRBS, where a superposition of different frequencies occurs, the same software functionality may be less accurate.
4. Subjective and Objective Evaluation
For the subjective–objective correlation evaluation, this section introduces the subjective assessment process and motivates the utilized objective parameters.
4.1. Subjective Evaluation
4.1.1. Questionnaire and Driver Selection
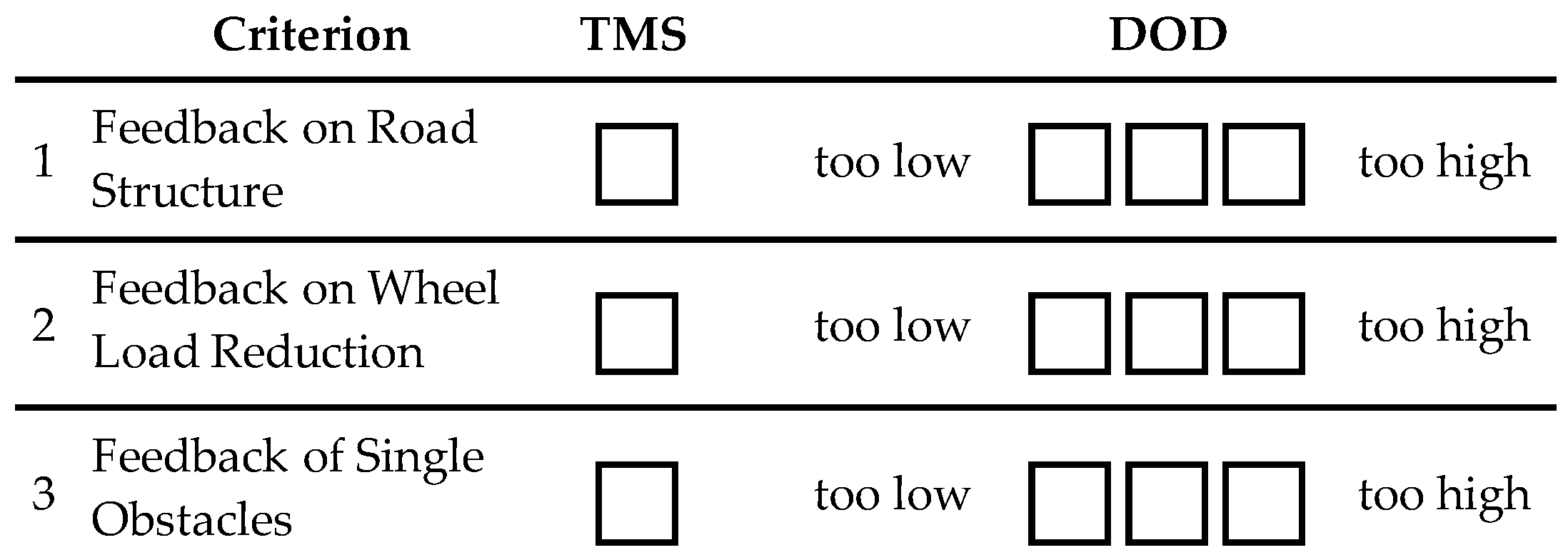
For the subjective evaluation of the feedback behavior of the steering system, one professional driver with more than ten years of experience in steering system evaluation was selected. Since the focus of this work is the evaluation of safety-relevant feedback information to the driver, the assessment was limited to cornering driving situations and to criteria that reflect these characteristics, namely feedback on the road structure, wheel load reduction, and single obstacles. This amount of three criteria complies with the recommended maximum of ten criteria for one test drive from [5]. For the numeric assessment of the individual criteria, a two-scale approach was used, as introduced in [25]. The first scale is a ten-mark scale (TMS) where “1” represents the neglect of safety requirements and “10” is an ideal rating, exceeding all expectations [25]. A second scale represents the direction of deviation (DOD) from the optimum specification. For feedback evaluation, the directions are indicated as “too low” or “too high”. An exemplary criterion is displayed in Figure 4.
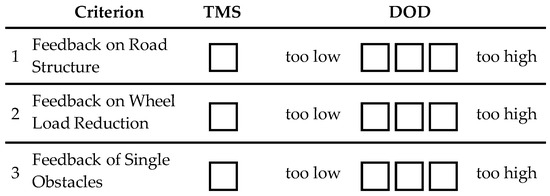
Figure 4.
Definition of questionnaire for steering feedback evaluation during cornering.
4.1.2. Evaluation Procedure
For the evaluation of the subjective criteria within the real vehicle, the different applications were ordered in a random sequence. Furthermore, no information concerning the changes within the application was disclosed to the driver. The selection of the assessment criteria was previously discussed together with the evaluator to guarantee the same understanding of the criteria. A reference velocity of 70 km/h was communicated and verified by the instructor during the evaluation. This velocity is high enough to investigate safety-relevant feedback information and not too high for most track sections of a proving ground.
The assessment was conducted in a closed testing facility, allowing reproducible driving of the relevant track sections. It was also emphasized to use similar surrounding conditions for the evaluation of the same criteria for different applications, aiming for improved comparability. In the beginning, a reference application was utilized and communicated to the driver. The reference scores were made available during the assessment of the residual applications. Although the TMS represents an absolute grading system, a reference setup aids in differentiating the applications and, therefore, improves the identification of correlations, as reported in [26]. For the evaluation, no time restrictions were communicated, and the driver was allowed to rate the criteria in his preferred order. Subjective evaluation of all applications was divided up into three consecutive days to reduce the workload on the evaluator. The surrounding conditions were noted and remained within a range of ±2 °C at 13 °C with dry roads. The reference setup was assessed on day one and three, to compare the reproducibility of the subjective assessment. For feedback evaluation, a deviation was only detected for the road structure, which improved by 0.5 points. The residual criteria were rated identical, underlining the good reproducibility.
4.2. Test Bench Excitation Signals and Objective Parameters
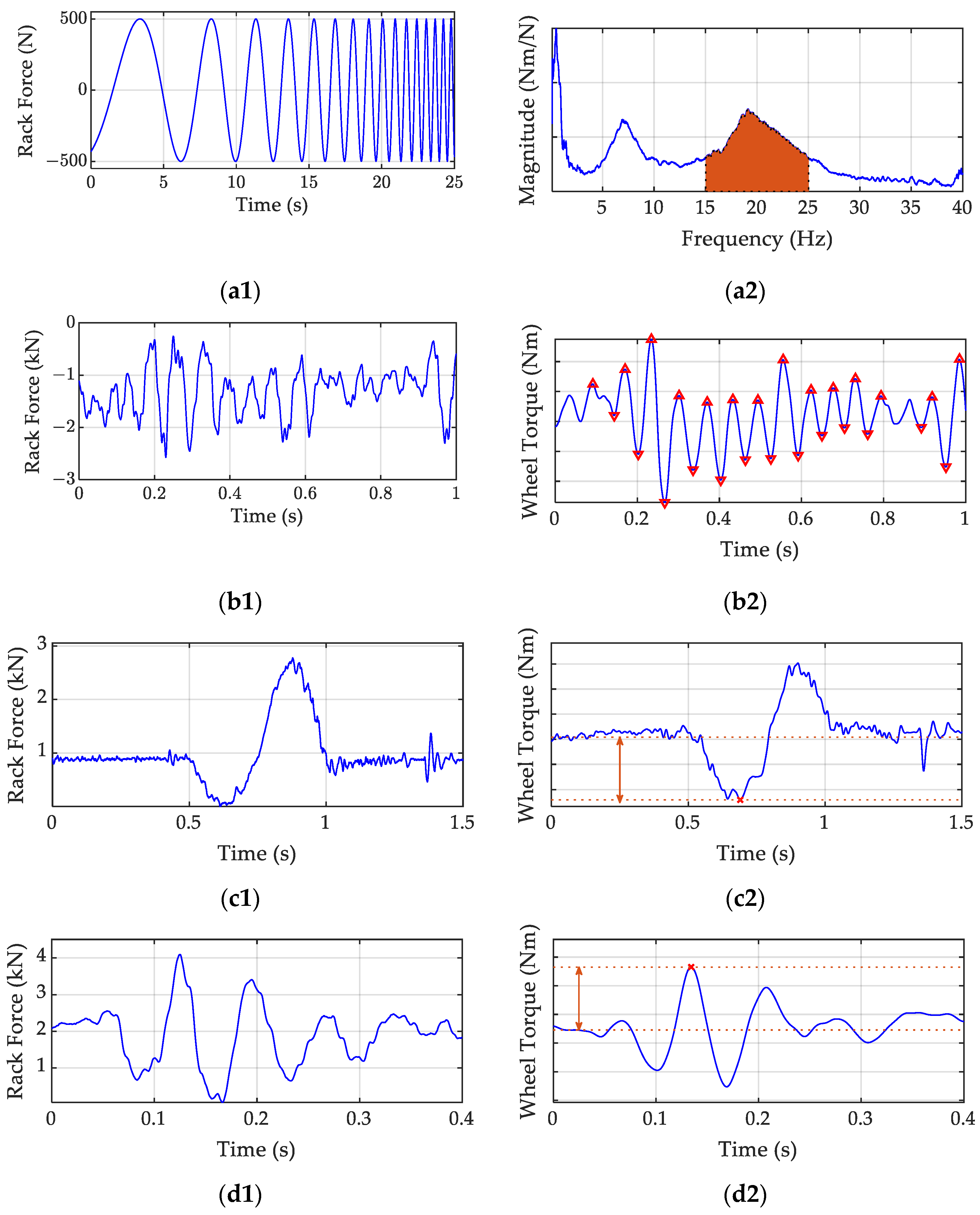
Based on the reported feedback evaluation approaches on a steering system test bench introduced before, the reference excitation signal is slightly altered and represented by a sine-sweep with an exponentially increasing frequency from 0.1 Hz to 40 Hz, an amplitude of 500 N, and a duration of 50 s. An exponentially increasing frequency allows a shorter investigation duration, whereas an increased maximum frequency delivers a larger frequency range available for the identification of objective criteria and is specially selected for road structure feedback. These alterations, compared to the reported experiment, do not influence the resulting magnitude course derived from the reference setup. Since cornering is investigated, a steering wheel angle of 50 ° and a rack force offset of 2300 N is implemented. The corresponding objective parameter here is the integral of the magnitude in a defined frequency range relevant to the evaluated driving scenario. An extract of the excitation signal, as well as a visualization of the objective parameter derivation, are displayed in Figure 5(a1) and (a2), respectively. The frequency ranges are selected according to the occurring rack force frequency content. Therefore, as seen in Figure 5 on the left, the lowest frequency content is expected for the wheel load reduction, followed by the single obstacle and the road structure feedback. Detailed information on the frequency ranges are depicted in Table 1 and Table 2.
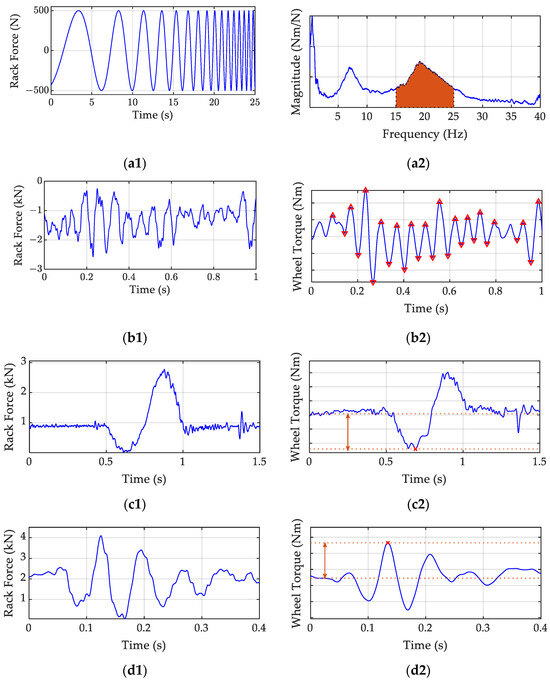
Figure 5.
Definition of investigated maneuvers with steering rack force excitation (left) for the excitation signals for (a1) sine-sweep (b1) road structure (c1) wheel load reduction and (d1) single obstacles and the corresponding wheel- torque-based objective parameters (right) for (a2) sine-sweep (b2) road structure (c2) wheel load reduction and (d2) single obstacles.

Table 1.
Comparison of the obtained Pearson coefficient for the different test cases with zero angle controlled steering wheel.
Table 2.
Comparison of the obtained Pearson coefficient for the different test cases with human grip model.
For the second generic excitation signal, the PRBS and an amplitude of 500 N are selected for comparability with the sweep excitation.
Equivalent to the sine-sweep excitation signal, the integral of the magnitude between two defined frequencies is utilized for objective–subjective correlation approaches.
For the specific investigation of the driving scenarios, vehicle measurements are utilized for a transfer to the test rig. Selection of the maneuvers is conducted for situations in which the driver evaluates the specific subjective criteria, aiming to identify meaningful correlations. The measurement includes the vehicle velocity for the residual bus simulation, steering wheel angle, and occurring rack forces for the mechanical excitations of the system. Relevant sections of the investigated driving situations are displayed in Figure 5 on the left side, an illustration of the objective parameter on the right side.
In the case of road structure feedback, a coarse-grained road section is used, characterized by high-frequency oscillations of the rack force at 10 Hz and above; see Figure 5(b1). Therefore, the starting frequency for the calculation of the surface area under the feedback gain course is chosen accordingly. The upper limit is selected based on the best correlation result to the subjective data, where a starting point of 30 Hz and a discretization of 5 Hz to the maximum frequency range is implemented. As a result, for PRBS, the upper limit is identified as 50 Hz, and for sine sweep, 30 Hz is selected. For the time-domain investigation, since the oscillations in the steering wheel are comparatively small due to the low pass character of the steering system, the magnitude of the low and high points alone may not be sensed by the driver. Therefore, the objective parameter is represented by the mean difference between two subsequent high and low points of the wheel torque, indicated in Figure 5(b2). By the utilization of the difference between the maximum and minimum value, this difference is expected to be sensed by the driver. Averaging is performed since the evaluation is performed over a larger timespan, representing a difference from the other investigated criteria. It is also possible to introduce a frequency evaluation on the time-domain signals. However, this approach leads to the loss of time-dependent information. Therefore, it is not possible to identify two adjacent high- and low-points in the frequency domain since a superposition of different frequencies occurs. As the idea for this objective parameter is based on the total magnitude of the perceivable steering torque difference independent of the frequency content, this approach is neglected in this work.
As for the evaluation of wheel load reduction, the reference force signal is displayed in Figure 5(c1). During the lift of the suspension, lateral tire forces are reduced due to decreased wheel load, which also reduces the occurring rack force. The subsequent overshoot of the rack force originates from the compression of the suspension, where the wheel load is increased. An objective parameter for this experiment is represented by the decrease in wheel torque during the vehicle lift and displayed in Figure 5(c2). This criterion is selected since it represents the first indication of wheel load reduction to inform the driver. Subsequent wheel load increase occurs after the critical situation and is therefore regarded as less relevant. The objective parameter is defined as the difference between the low point of the steering torque and the steady-state value before the wheel load reduction occurs, where a steady cornering condition is reached. This level is obtained again subsequent to the maneuver since the steering wheel angle is not altered during the experiment. For the frequency content of sweep and PRBS excitation, the main contribution lies within a range of 2 Hz; see Figure 5(c1). Due to the uncertainty of the time course signal over different repetitions and the occurrence of smaller, less pronounced rack force excitations, the frequency range is set between 1 Hz and 10 Hz.
Feedback on single obstacle crossing represents the last investigated driving scenario and is described by the occurring rack forces during crossing of a single metal hump; see Figure 5(d1). A short rack force input with oscillations at approximately 15 Hz and varying amplitude characterizes this scenario. Here, the maximum occurring wheel torque amplitude as a response to the crossing is regarded as the objective parameter; see Figure 5(d2). This selection is based on the initial shock in the steering torque when the obstacle is passed. Oscillations after this point are assumed to be shadowed by steering wheel angle deviations by the driver because of the initial excitation, exemplarily to maintain the course. Like the wheel load reduction maneuver, the steady-state level originates from steady-state cornering with a constant steering wheel angle, which is maintained throughout the test. The relevant frequency range for the sweep and PRBS evaluation is set from 5 Hz to 20 Hz to allow the incorporation of small deviation from the identified frequency and to differentiate the criteria from wheel load reduction and road structure feedback.
The described driving scenarios are also utilized for the derivation of relevant frequency ranges of the generic excitation signals. As displayed in the visualization of the driving scenarios in Figure 5b–d, the lowest frequency content is expected within the wheel load reduction scenario, followed by the single obstacle maneuver. The highest frequency occurs for the road structure feedback. Based on these observations, the frequencies for the different criteria are ordered and selected to include the prevailing frequency. For road structure, the upper limit of the frequency range is determined by the highest correlation value with the subjective assessment. The derived frequency ranges are depicted within the following comparisons.
5. Results
To investigate the influence of the individual simplifications, this section provides a qualitative comparison of the derived transfer function magnitudes for the generic approaches. Additionally, a direct comparison is presented and discussed for their significance.
5.1. Qualitative Comparison of the Generic Approaches
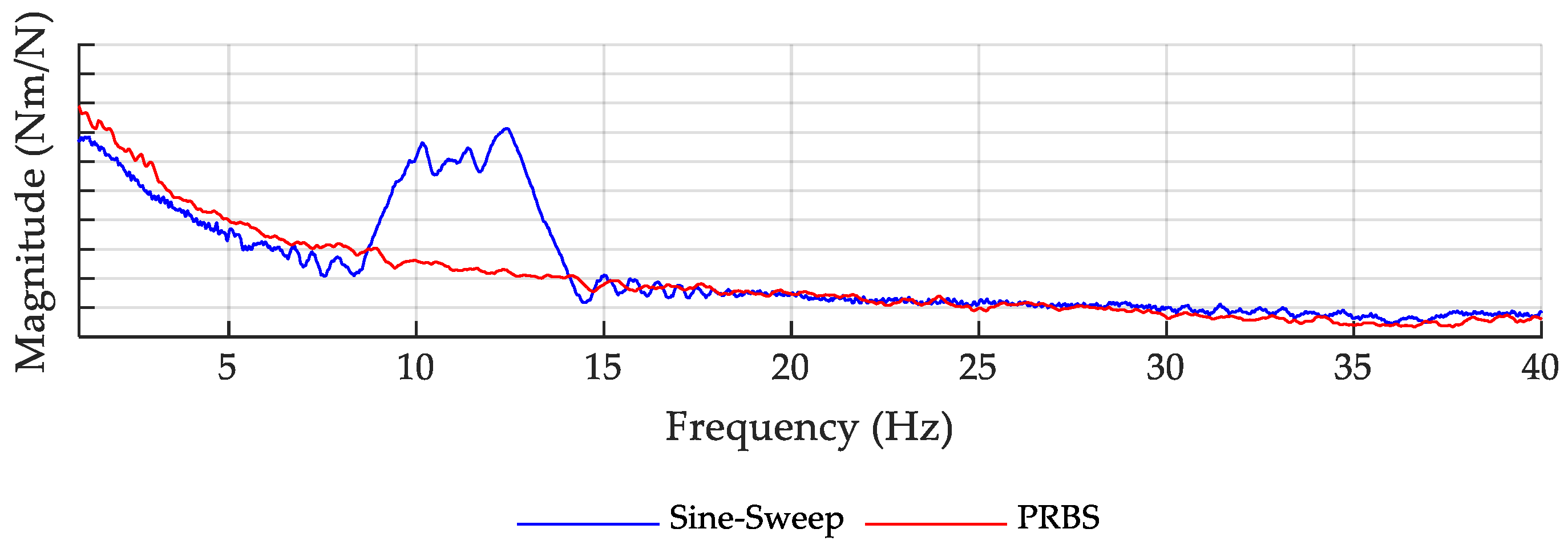
Figure 6 depicts an FFT magnitude estimation of the feedback transfer function and compares the results for steering system application “A06” derived by sine-sweep and PRBS excitation. Within the frequency range from 8 Hz to 15 Hz, sine-sweep identification exhibits a three times larger magnitude than for the PRBS approach, where the peak is not visible.
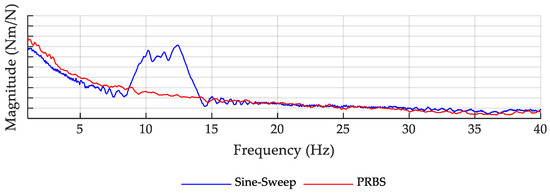
Figure 6.
Comparison of the feedback magnitude for a sine-sweep and PRBS steering rack force excitation with “A06”.
A possible explanation for this finding is based on the features of the excitation signals. While the PRBS exhibits characteristics like white noise, which means a wide spread of frequency contents in the signal, the sine-sweep signal provides a distinct sine wave with one prevailing frequency at a certain time. This characteristic appears to enable the steering system to improve the feedback behavior and further motivates the investigation of a PRBS excitation.
5.2. Subjective–Objective Correlation
5.2.1. Test Case Comparison
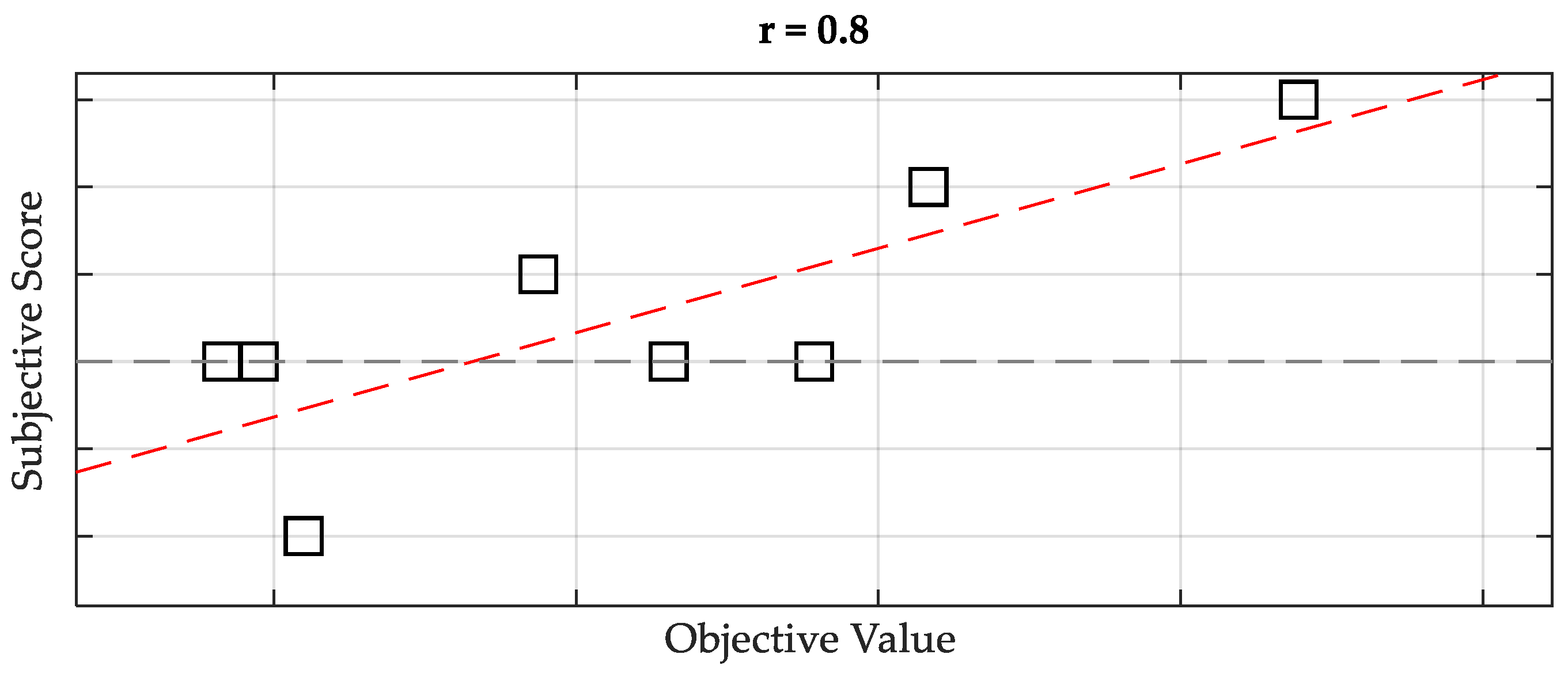
The utilized objective parameters for the imitation of driving scenarios are already explained in Figure 5 with their subjective criterion from Figure 4. This means that criteria 1–3 from Figure 4 match the driving scenarios from Figure 5b–d and their objective parameter, respectively. Now, diagrams as in Figure 7 are derived based on the obtained objective and subjective results to visualize the correlation between the objective value on the abscissa and the subjective evaluation on the ordinate. That means the black squares in Figure 7 represent the individual applications. Based on the Pearson coefficient defined in the goal formulation in Equation (2), the following form can be derived:
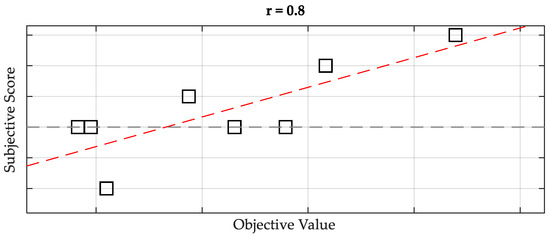
Figure 7.
Correlation diagram for the evaluation for feedback of single obstacles with the human grip model.
Here, stands for the objective score of application for the subjective criterion , while represents the subjective perception of application of the criterion . and are the average of the objective value and subjective score of criteria , respectively.
The results of the derived Pearson coefficients for the excitation signal sine-sweep, PRBS, the driving maneuver for each criterion, as well as the investigated frequency range for the generic excitation signals, are summarized in Table 1. Here, a fixed-angle control of the SWA is deployed, and a vehicle velocity of 70 km/h is regarded.
For the two generic excitation signals, the Pearson coefficients indicate a superiority of the PRBS over the sine-sweep excitation. For feedback on wheel load reduction, PRBS leads to a strong correlation result, whereas a valid correlation was identified for the feedback on single obstacles. For road structure, PRBS displays no correlation. Although the PRBS approach outperforms the reconstruction of driving maneuvers in two out of three applications, the latter is able to identify valid correlations for each criterion. Solely sine-sweep excitation is unable to derive any valid correlation for the herein investigated applications.
5.2.2. Comparison of the Fixation Approach
In addition to the different excitation signals, the fixation of the steering wheel was either set to a fixed angle control, see Table 1, or the human grip model was implemented. The previously described experiments are now compared with the application of the human grip model. The Pearson coefficients and the difference of the Pearson coefficient to the fixed-angle steering wheel control from Table 1 are displayed in Table 2.
The utilization of the human grip model exhibits two applications wherein a reduction in the Pearson coefficient occurs. For the residual cases, an improvement in the correlation coefficient up to 0.38 is found. Since the reduction of the Pearson coefficients for the two applications is negligently small, the added value of the human grip model for the evaluation of safety-relevant feedback information is clearly visible. It also enables the sine sweep approach to deliver valid correlations in two out of three situations.
5.3. Discussion
Based on the presented findings, the implementation of the human grip model for objective evaluation of safety-relevant feedback information of a steering system is strongly recommended. For the investigated criteria, either an improvement in the correlation or an approximately constant correlation was obtained by its implementation.
A cause for the added value of the grip model lies in the presence of angle displacement if compared to the clamped approach. Because of the occurring steering angles, differences in friction or servo force may occur, influencing the derived results.
For the excitation signal, a differentiation for the applicability can be derived based on the duration of the excitation occurrence. For long-term tie rod force excitations like road structure excitation, sine-sweep in combination with the human grip model represents the best approach. For short rack excitations, like a single obstacle and wheel load reduction, the best correlation results can be found for PRBS and driving maneuver investigations. A possible explanation may be found in the characteristics of the signal. While the road structure primarily excites oscillations of similar frequency in the system over a prolonged timespan, the sine sweep approach delivers a good correlation. Short oscillation or single oscillations are better represented by excitation signals without isolated frequencies and amplitudes; see the explanation in Figure 6. Therefore, improved correlation can be obtained for the driving scenarios and the PRBS approach. Although sine-sweep exhibits no valid correlation without the human grip model, the tendency of improved correlation for long-term excitation can also be found in the Pearson coefficients of Table 1.
Overall, PRBS represents a valid alternative approach for the investigation of steering feedback, especially for quickly varying and short feedback excitations, while the human grip model clearly exhibits an added value.
6. Conclusions and Outlook
In this contribution, a steering system test bench is utilized to evaluate the steering system feedback in terms of safety-relevant information. First, based on reported experiments on test benches in literature, the transfer function magnitude from steering rack force to steering wheel torque, estimated by sine-sweep force excitations, is investigated for correlations. Simplifications on this approach are identified, and test cases are derived to analyze their impact on the correlation result. This includes the utilization of a quasi-stochastic signal for transfer function estimation, the imitation of the human driver holding a steering wheel, and the transfer of vehicle tests to the steering test bench. The presented results indicate that a quasi-stochastic signal (PRBS) is a valid additional approach for steering system feedback evaluation, especially if dynamic and quick feedback situations like single obstacles are investigated. For prolonged excitations, exemplarily originating from road structure feedback, sine-sweep applications for transfer function estimation represent a valid approach. Furthermore, the advantage of an implemented human grip model was demonstrated, and a recommendation for its application can be derived. The described results immediately support the objective development of steering systems within the automotive development process and lay the basis for future steering technologies, like SbW, where test-bench-based development approaches are inevitable in the early stages of development to guarantee safety. Furthermore, the approaches can be utilized to identify safety-relevant information from the tire–road contact in the steering system and use these to improve the safety of autonomous or assisted driving functions. Future investigations should expand on the range of test drivers to deliver a larger sample for statistical analysis and include additional criteria like understeer, oversteer, and changes in road friction. Investigations with PSD information instead of PRBS represent another approach to better approximate real-world conditions.
Author Contributions
Conceptualization, A.H., G.M., P.M.S. and D.S.; methodology, A.H. and G.M.; validation, A.H. and G.M.; writing—original draft preparation, A.H. and P.M.S.; writing—review and editing, D.S.; supervision, D.S. and P.M.S.; project administration, G.M.; resources G.M. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
Restrictions apply to the availability of these data. Data were obtained from Dr.-Ing. h.c. F. Porsche AG and are available from the authors with the permission of Dr.-Ing. h.c. F. Porsche AG.
Acknowledgments
We acknowledge support by the Open Access Publication Fund of the University of Duisburg-Essen.
Conflicts of Interest
The authors declare no conflict of interest. The funders had no role in the design of the study; in the collection, analyses, or interpretation of data; in the writing of the manuscript; or in the decision to publish the results.
Acronyms
| DOD | Direction of Deviation |
| EPS | Electric Power Steering |
| FFT | Fast Fourier Transformation |
| HiL | Hardware-in-the-Loop |
| HPS | Hydraulic Power Steering |
| PMLSM | Permanent Magnet Linear Synchronous Motor |
| PRBS | Pseudo-Radnom-Binary-Sequence |
| PSD | Power-Spectral-Density |
| RLA | Rod Left Actuator |
| RRA | Rod Right Actuator |
| SbW | Steer-by-Wire |
| SWA | Steering Wheel Actuator |
| TMS | Ten Mark Scale |
Nomenclature
| Arm Damping Coefficient | |
| Hand Damping Coefficient | |
| Measured Rack Force at RRA | |
| Reference Rack Force at RRA | |
| Feedback Transfer Function | |
| Hand Inertia | |
| Steering Wheel Inertia | |
| Arm Stiffness Coefficient | |
| Hand Stiffness Coefficient | |
| Measured Torque at SWA | |
| Pearson Coefficient | |
| Vehicle Velocity | |
| Objective Value | |
| Subjective Value | |
| Reference Steering Wheel Angle at SWA | |
| Additional Steering Wheel Angle from the Human Grip Model |
References
- Harrer, M.; Pfeffer, P.E. Steering Handbook; Springer International Publishing: Cham, Switzerland, 2017; ISBN 978-3-319-05449-0. [Google Scholar]
- Wolf, H.J. Ergonomische Untersuchung des Lenkgefühls an Personenkraftwagen. Ph.D. Dissertation, Technische Universität München, München, Germany, 2009. [Google Scholar]
- Grau, J.; Nippold, C.; Bossdorf-Zimmer, B.; Küçükay, F.; Henze, R. Objective Evaluation of Steering Rack Force Behaviour and Identification of Feedback Information. SAE Int. J. Passeng. Cars—Mech. Syst. 2016, 9, 1279–1304. [Google Scholar] [CrossRef]
- Düsterloh, D. Funktionsoptimierung und Komplexitätsbeherrschung im Entwicklungsprozess Mechatronischer Fahrwerksysteme am Beispiel Elektromechanischer Lenksysteme. Ph.D. Dissertation, Universität Duisburg-Essen, Duisburg, Germany, 2018. [Google Scholar]
- Heißing, B.; Brandl, H.J. Subjektive Beurteilung des Fahrverhaltens, 1st ed.; Vogel: Würzburg, Germany, 2002; ISBN 3-8023-1903-6. [Google Scholar]
- Grau, J. Objektivierung des Rückmeldeverhaltens Elektromechanischer Lenksysteme. Ph.D. Dissertation, Technische Universität Braunschweig, Braunschweig, Germany, 2018. [Google Scholar]
- Brunn, P.; Harrer, M. Objektivierung der Lenkungsrückmeldung. VDI Fortschrittsberichte Reihe 2004, 12, 69–79. [Google Scholar]
- Raabe, J.; Ketzmerick, E.; Abel, H.; Prokop, G. Steering System Simulation during the Concept Phase regarding Feedback Behavior. SAE Int. J. Veh. Dyn. Stab. NVH 2022, 6, 189–206. [Google Scholar] [CrossRef]
- Pfeffer, P.E. Interaction of Vehicle and Steering System Regarding On-Centre Handling. Ph.D. Dissertation, University of Bath, Bath, UK, 2006. [Google Scholar]
- Schimpf, R. Charakterisierung von Lenksystemen mit Hilfe Eines Lenksystemprüfstands. Ph.D. Dissertation, TU Wien, Wien, Austria, 2016. [Google Scholar]
- Von Groll, M. Modifizierung von Nutz- und Störinformationen am Lenkrad durch Elektromechanische Lenksysteme. Ph.D. Dissertation, Universität Duisburg-Essen, Duisburg, Germany, 2006. [Google Scholar]
- Haas, A.; Menze, G.; Sieberg, P.M.; Schramm, D. Evaluation of Feedback Behavior of Steering Systems on a mHiL-Steering-Test-Bench. In Proceedings of the Internationales Stuttgarter Symposium—ISSYM 2023, Stuttgart, Germany, 4–5 July 2023; Kulzer, A.C., Reuss, H.-C., Wagner, A., Eds.; Springer Vieweg: Wiesbaden, Germany, 2023. [Google Scholar] [CrossRef]
- Isermann, R.; Münchhof, M. Identification of Dynamic Systems: An Introduction with Applications; Springer: Berlin/Heidelberg, Germany, 2011; ISBN 978-3-540-78879-9. [Google Scholar]
- Haas, A.; Schrage, B.; Menze, G.; Sieberg, P.M.; Schramm, D. Oscillation and Vibration Reduction Approaches on a HiL-Steering-Test-Bench. IEEE ASME Trans. Mechatron 2023, 1–11. [Google Scholar] [CrossRef]
- Haas, A.; Schrage, B.; Menze, G.; Sieberg, P.M.; Schramm, D. Improvements on the Dynamical Behavior of a HiL-Steering System Test Bench. Actuators 2023, 12, 186. [Google Scholar] [CrossRef]
- Uselmann, A.; Preising, E.; Schrage, B.; Düsterloh, D. A Test of Character for Steering Systems. dSPACE Magazine, November 2016; pp. 24–31. [Google Scholar]
- Düsterloh, D.; Schrage, B. Lenkungsentwicklung am mHiL-Lenkungsprüfstand—Parameteridentifikation und Funktionsentwicklung am mHiL-Lenkungsprüfstand. In SIMVEC Simulation und Erprobung in der Fahrzeugentwicklung; VDI Verlag: Düsseldorf, Germany, 2016. [Google Scholar]
- Nippold, C. Prüfstandsbasierte Lenkungsoptimierung im Mittenbereich. Ph.D. Dissertation, Technische Universität Braunschweig, Braunschweig, Germany, 2017. [Google Scholar]
- Barthenheier, T. Potenzial Einer Fahrertyp- und Fahrsituationabhängigen Lenkradmomentgestaltung. Ph.D. Dissertation, Technische Universität Darmstadt, Darmstadt, Germany, 2004. [Google Scholar]
- Weißbacher, J. Automatische Reglerparametrierung von Servoantriebsachsen. Ph.D. Dissertation, Technische Universität Graz, Graz, Austria, 2016. [Google Scholar]
- De Vlugt, E.; Schouten, A.C.; van der Helm, F.C.T. Closed-loop multivariable system identification for the characterization of the dynamic arm compliance using continuous force disturbances: A model study. J. Neurosci. Methods 2003, 122, 123–140. [Google Scholar] [CrossRef] [PubMed]
- Haas, A.; Schrage, B.; Menze, G.; Sieberg, P.M.; Schramm, D. Subjective and Objective Evaluation of a Steering Function on a Steering System Test Bench. In Proceedings of the AmE 2023—Automotive Meets Electronics, 14. GMM Symposium, Dortmund, Germany, 15–16 June 2023. [Google Scholar]
- Lunkeit, D. Ein Beitrag zur Optimierung des Rückmelde- und Rückstellverhaltens Elektromechanischer Servolenkungen. Ph.D. Dissertation, Universität Duisburg-Essen, Duisburg, Germany, 2014. [Google Scholar]
- Uselmann, A. Ein Beitrag zur funktionalen Entwicklung eines Elektromechanischen Lenksystems für Sportlich Orientierte Fahrzeuge. Ph.D. Dissertation, Universität Duisburg-Essen, Duisburg, Germany, 2017. [Google Scholar]
- Harrer, M. Characterisation of Steering Feel. Ph.D. Dissertation, University of Bath, Bath, UK, 2007. [Google Scholar]
- Henze, R. Beurteilung von Fahrzeugen mit Hilfe Eines Fahrermodells. Ph.D. Dissertation, Technische Universität Carolo-Wilhelmina zu Braunschweig, Braunschweig, Germany, 2004. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).