
Analysis and Preliminary Design of Variable Flux Reluctance Machines: A Perspective from Working Field Harmonics



Abstract
1. Introduction
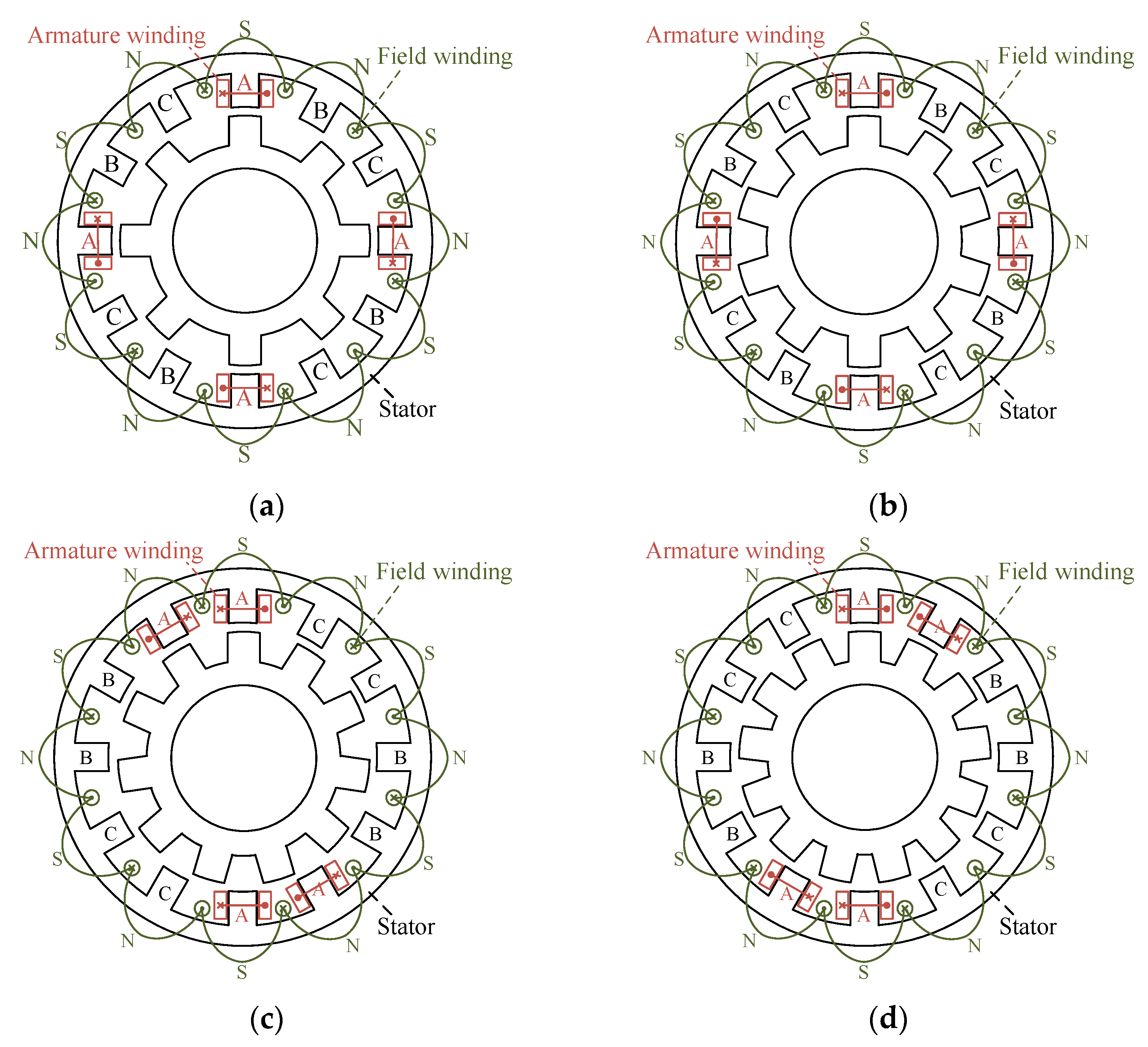
2. Structure and Operation Principle
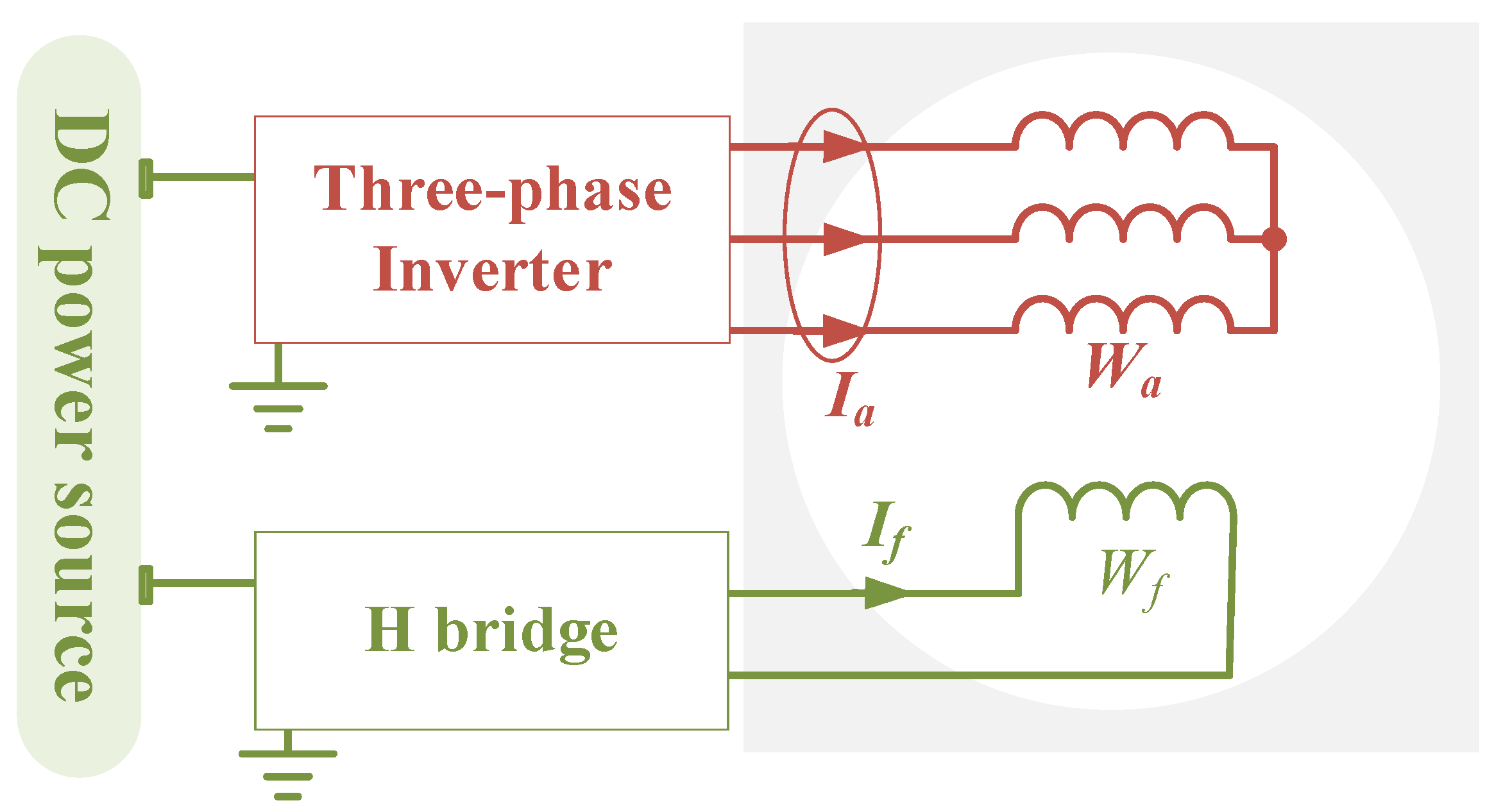
2.1. Topology and Drive System
2.2. Operation Principle
3. Analysis of No-Load Airgap Field Harmonics
3.1. Definition of Working Field Harmonics
3.2. Spatial and Temporary Order of Working Harmonics
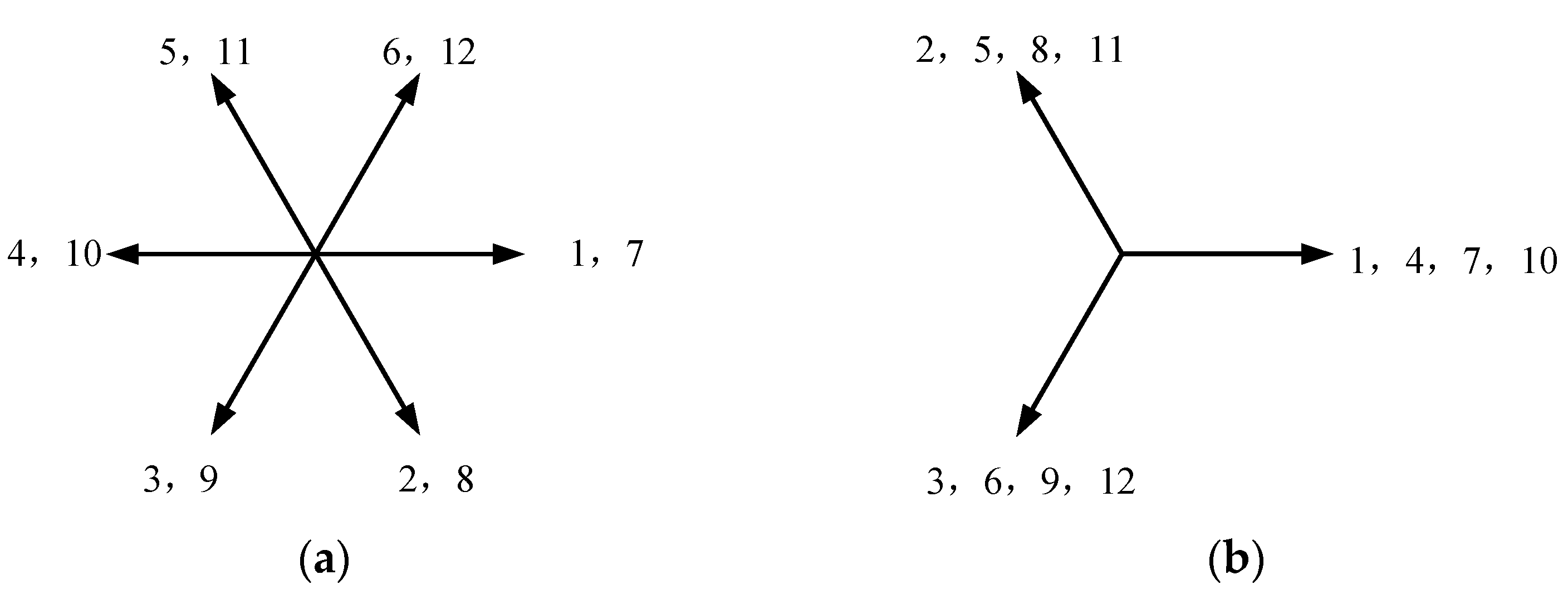
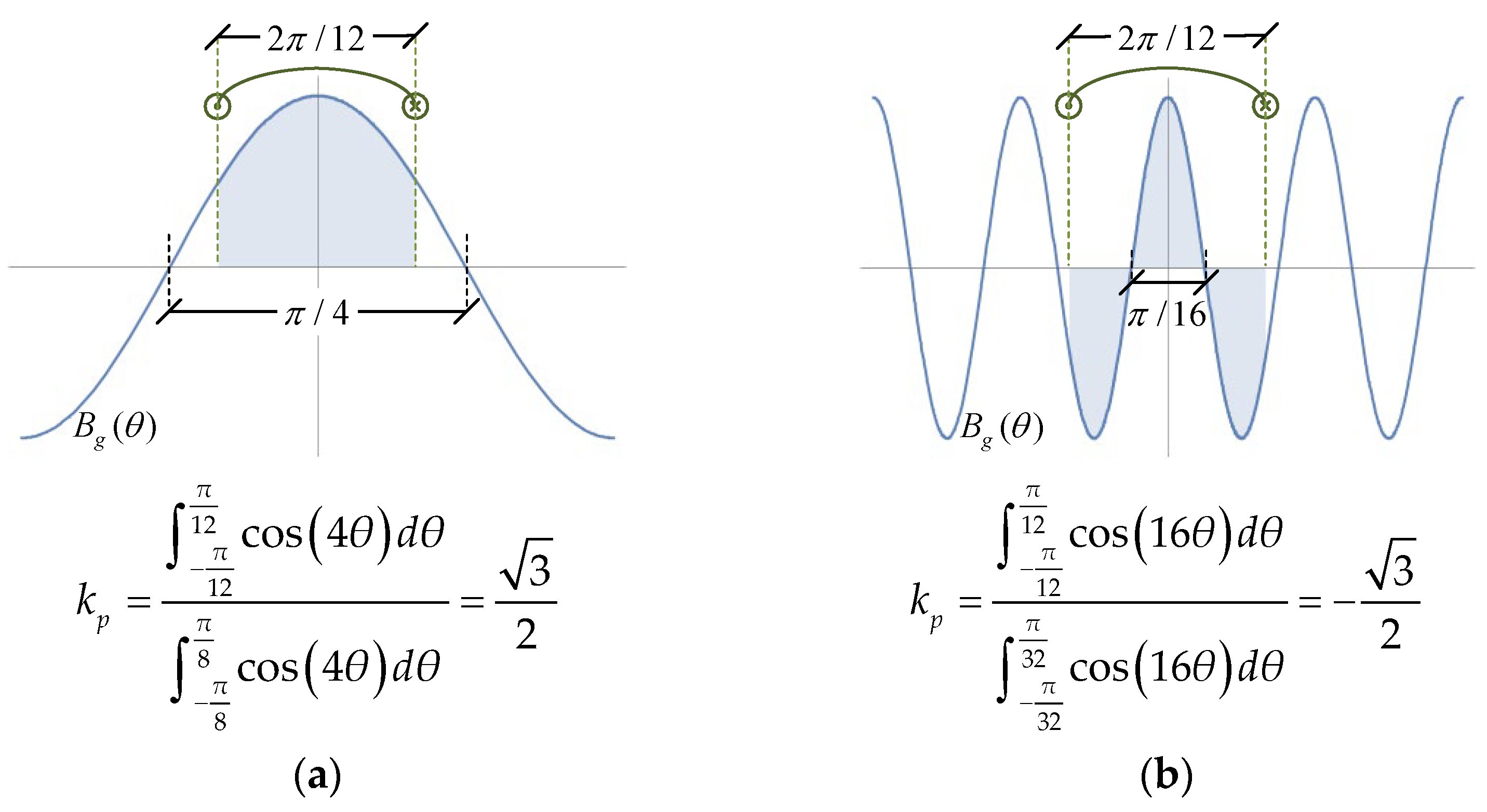
3.3. Winding Theory
4. Preliminary Parameter Design
4.1. Torque Model
4.2. Distribution Rule of the Armature and Field Magnetomotive Force
4.3. Approximate Torque Model and Stator/Rotor Slot Combination
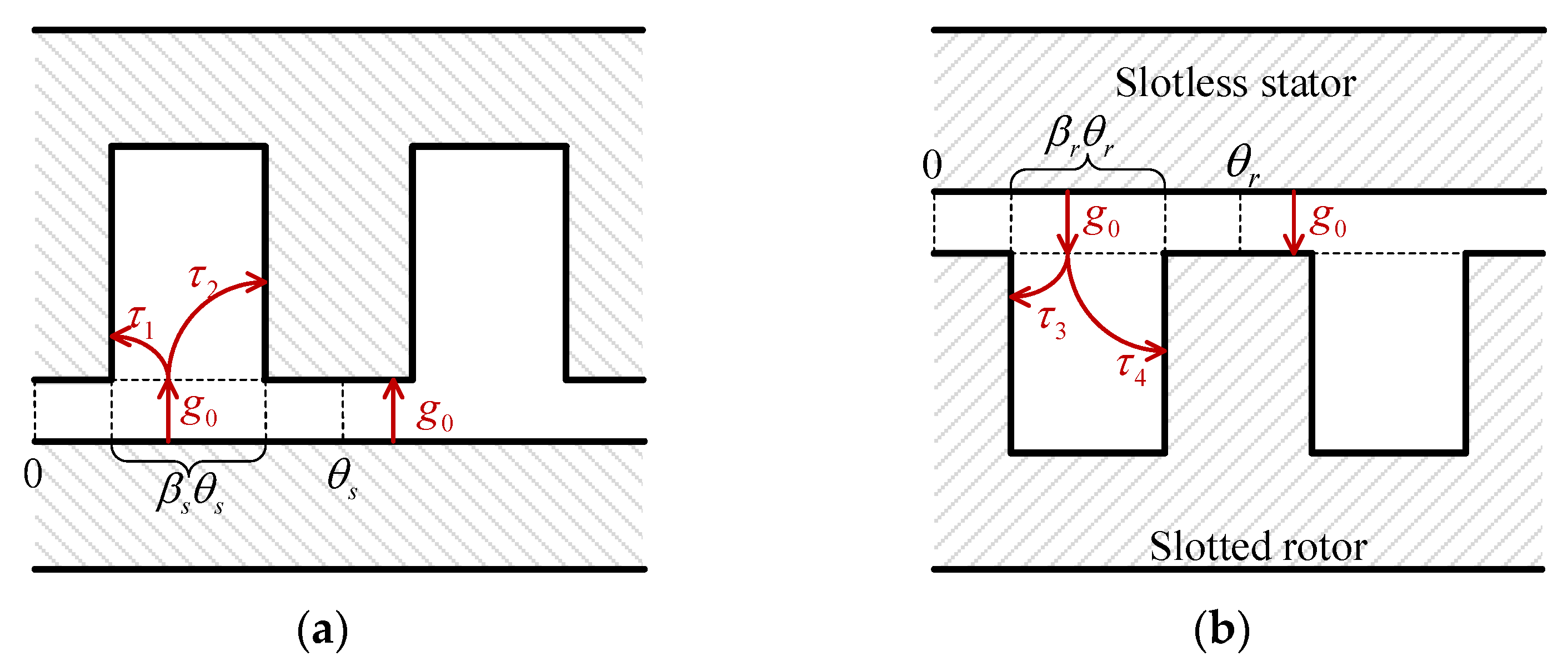
4.4. Rotor Geometric Design
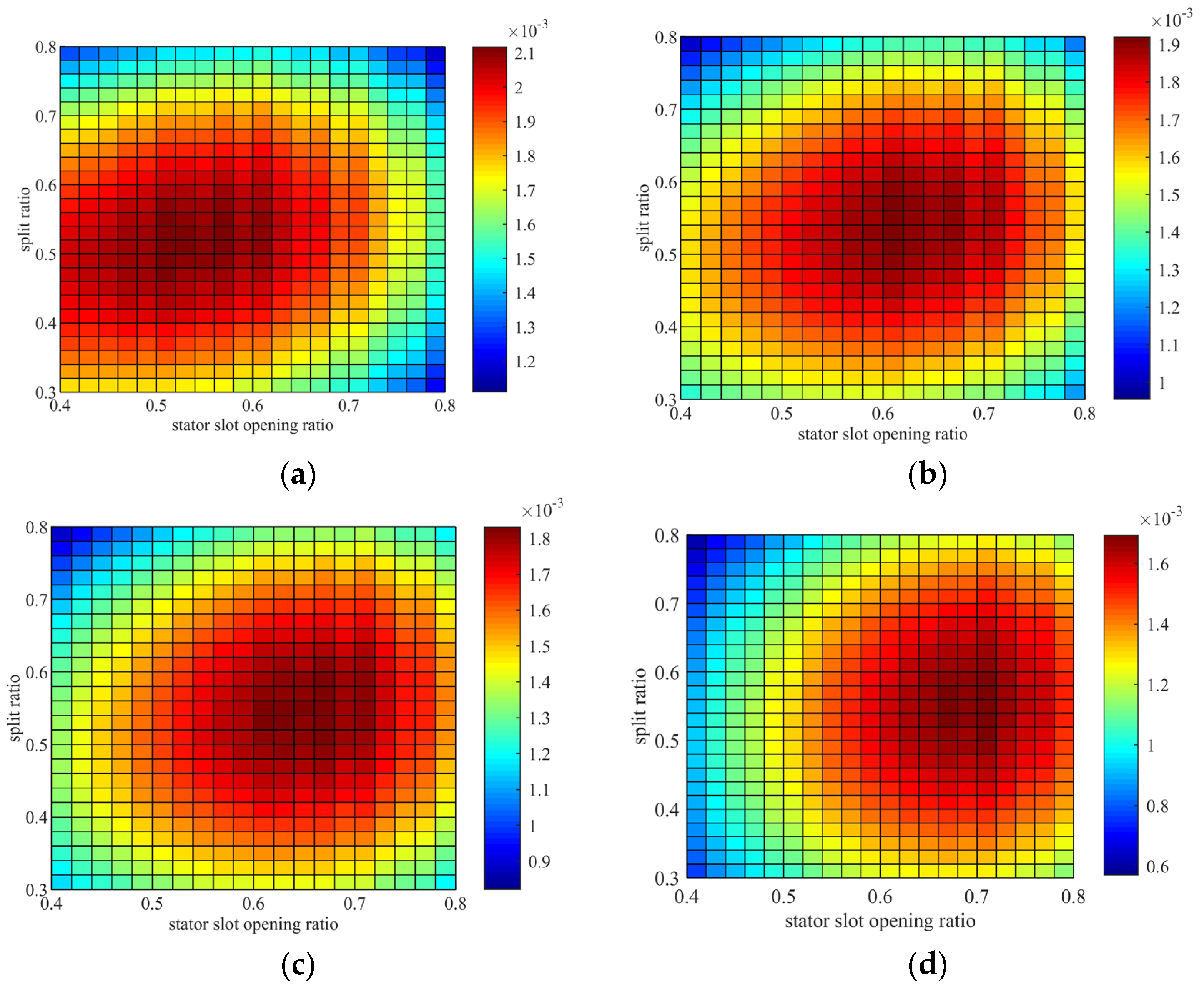
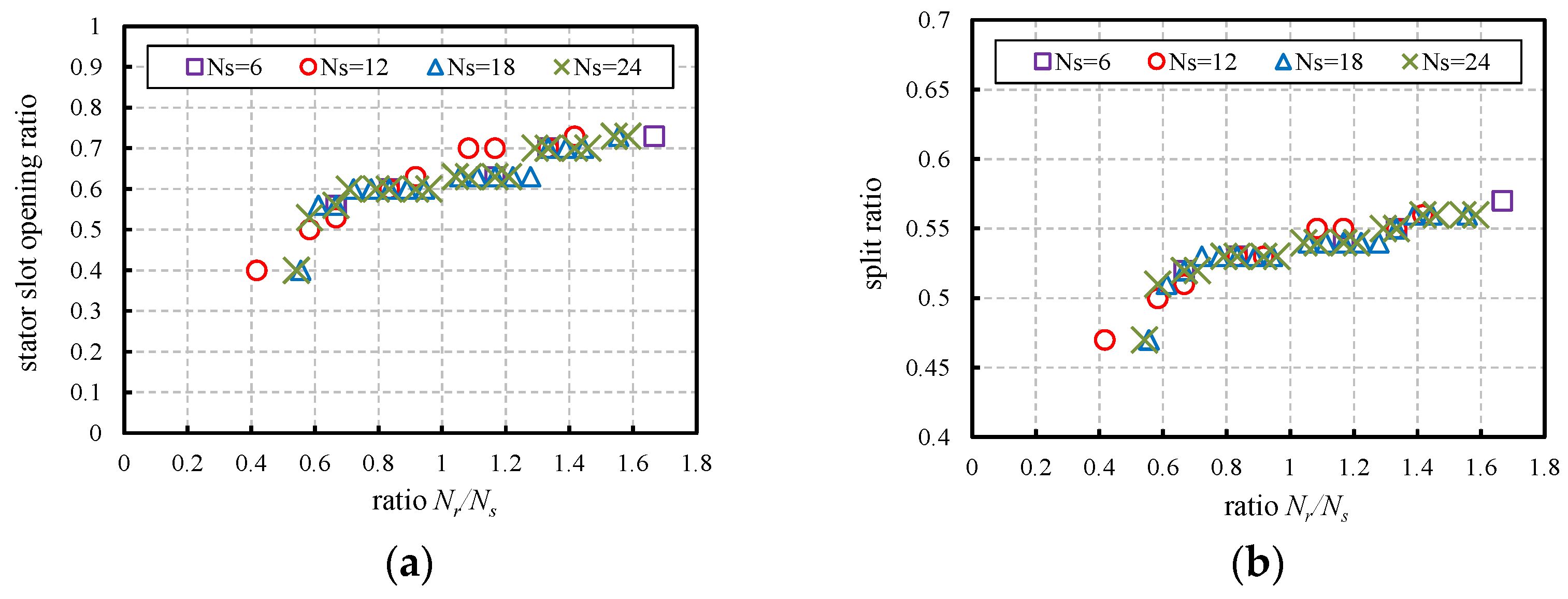
4.5. Stator Geometric Design
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| αse | slot electrical angle | μ0 | vacuum permeability |
| βr | rotor slot opening to slot pitch ratio | Na | turn number of a stator coil |
| βs | stator slot opening to slot pitch ratio | Nf | turn number of a field coil |
| Bg | no-load airgap flux density | Nr | rotor slot number |
| Bk | magnitudes of kth-order flux density | Ns | stator slot number |
| ds | split ratio | Pcu | copper loss |
| δT | torque error | Pspat | spatial order |
| fe | electrical frequency | Ptemp | temporal order |
| Ff | MMF of the field winding | ρcu | electrical conductivity of copper |
| fi | ith-order unit field winding MMF | R | stator outer radius |
| g0 | airgap length | Rs | stator inner radius |
| hy | stator yoke thickness | Rr | rotor outer radius |
| If | field current | Sslot | area of one stator slot |
| Ia | armature current amplitude | τs | coil span angle |
| kd | distribution factor | Tavg | average torque |
| kp | pitch factor | Te | electrical period |
| kcu | slot fill factor | Wa | armature winding |
| kw | winding factor | Wf | field winding |
| Λ | radial airgap permeance | Ωr | mechanical angular speed |
| Λr | radial airgap permeance of single-side salient-rotor model | Ψa | phase flux linkage amplitude |
| Λrk | kth-order rotor permeance | θintial | initial position |
| Λs | radial airgap permeance of single- side salient-stator model | L | core length |
| Λsf | radial stator permeance polarized by the field winding | lcoil | length of the one-turn coil |
Appendix A
Appendix B
Appendix C

References
- Sanguesa, J.A.; Torres-Sanz, V.; Garrido, P.; Martinez, F.J.; Marquez-Barja, J.M. A Review on Electric Vehicles: Technologies and Challenges. Smart Cities 2021, 4, 372–404. [Google Scholar] [CrossRef]
- Malan, J.; Kamper, M.J. Performance of a Hybrid Electric Vehicle Using Reluctance Synchronous Machine Technology. IEEE IEEE Trans. Ind. Appl. 2001, 37, 1319–1324. [Google Scholar] [CrossRef]
- Zhu, Z.Q.; Howe, D. Electrical Machines and Drives for Electric, Hybrid, and Fuel Cell Vehicles. Proc. IEEE 2007, 95, 746–765. [Google Scholar] [CrossRef]
- Chau, K.T. Overview of Electric Vehicle Machines—From Tesla to Tesla, and beyond. In Proceedings of the 2016 International Conference of Asian Union of Magnetics Societies (ICAUMS), Tainan, China, 1–5 August 2016; pp. 1–6. [Google Scholar]
- Chau, K.T.; Chan, C.C.; Liu, C. Overview of Permanent-Magnet Brushless Drives for Electric and Hybrid Electric Vehicles. IEEE Trans. Ind. Electron. 2008, 55, 2246–2257. [Google Scholar] [CrossRef]
- EL-Refaie, A.M. Fractional-Slot Concentrated-Windings Synchronous Permanent Magnet Machines: Opportunities and Challenges. IEEE Trans. Ind. Electron. 2010, 57, 107–121. [Google Scholar] [CrossRef]
- Boldea, I.; Tutelea, L.N.; Parsa, L.; Dorrell, D. Automotive Electric Propulsion Systems with Reduced or No Permanent Magnets: An Overview. IEEE Trans. Ind. Electron. 2014, 61, 5696–5711. [Google Scholar] [CrossRef]
- Wang, Y.; Nuzzo, S.; Zhang, H.; Zhao, W.; Gerada, C.; Galea, M. Challenges and Opportunities for Wound Field Synchronous Generators in Future More Electric Aircraft. IEEE Trans. Transp. Electrif. 2020, 6, 1466–1477. [Google Scholar] [CrossRef]
- Chu, W.Q.; Zhu, Z.Q.; Zhang, J.; Liu, X.; Stone, D.A.; Foster, M.P. Investigation on Operational Envelops and Efficiency Maps of Electrically Excited Machines for Electrical Vehicle Applications. IEEE Trans. Magn. 2015, 51, 8103510. [Google Scholar] [CrossRef]
- Ayub, M.; Hussain, A.; Jawad, G.; Kwon, B.-I. Brushless Operation of a Wound-Field Synchronous Machine Using a Novel Winding Scheme. IEEE Trans. Magn. 2019, 55, 8201104. [Google Scholar] [CrossRef]
- Jawad, G.; Ali, Q.; Lipo, T.A.; Kwon, B.-I. Novel Brushless Wound Rotor Synchronous Machine with Zero-Sequence Third-Harmonic Field Excitation. IEEE Trans. Magn. 2016, 52, 8106104. [Google Scholar] [CrossRef]
- Bostanci, E.; Moallem, M.; Parsapour, A.; Fahimi, B. Opportunities and Challenges of Switched Reluctance Motor Drives for Electric Propulsion: A Comparative Study. IEEE Trans. Transp. Electrif. 2017, 3, 58–75. [Google Scholar] [CrossRef]
- Rahman, K.M.; Fahimi, B.; Suresh, G.; Rajarathnam, A.V.; Ehsani, M. Advantages of Switched Reluctance Motor Applications to EV and HEV: Design and Control Issues. IEEE Trans. Ind. Appl. 2000, 36, 111–121. [Google Scholar] [CrossRef]
- Lee, J.W.; Kim, H.S.; Kwon, B.I.; Kim, B.T. New Rotor Shape Design for Minimum Torque Ripple of SRM Using FEM. IEEE Trans. Magn. 2004, 40, 754–757. [Google Scholar] [CrossRef]
- Fukami, T.; Matsuura, Y.; Shima, K.; Momiyama, M.; Kawamura, M. Development of a Low-Speed Multi-Pole Synchronous Machine with a Field Winding on the Stator Side. In Proceedings of the XIX International Conference on Electrical Machines—ICEM 2010 (IEEE), Rome, Italy, 6–8 September 2010; pp. 1–6. [Google Scholar]
- Liu, X.; Zhu, Z.Q.; Pan, Z.P. Analysis of Electromagnetic Torque in Sinusoidal Excited Switched Reluctance Machines Having DC Bias in Excitation. In Proceedings of the 2012 XXth International Conference on Electrical Machines (IEEE), Marseille, France, 2–5 September 2012; pp. 2882–2888. [Google Scholar]
- Liu, X.; Zhu, Z.Q.; Hasegawa, M.; Pride, A.; Deodhar, R. Vibration and Noise in Novel Variable Flux Reluctance Machine with DC-Field Coil in Stator. In Proceedings of the Proceedings of 7th International Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; Volume 2, pp. 1100–1107. [Google Scholar]
- Raminosoa, T.; Torrey, D.A.; El-Refaie, A.M.; Grace, K.; Pan, D.; Grubic, S.; Bodla, K.; Huh, K.-K. Sinusoidal Reluctance Machine with DC Winding: An Attractive Non-Permanent-Magnet Option. IEEE Trans. Ind. Appl. 2016, 52, 2129–2137. [Google Scholar] [CrossRef]
- Zuurbier, M.M.J.; Fahdzyana, C.A.; Hofman, T.; Bao, J.; Lomonova, E.A. Geometric Optimization of Variable Flux Reluctance Machines for Full Electric Vehicles. In Proceedings of the 2019 Fourteenth International Conference on Ecological Vehicles and Renewable Energies (EVER), Monte-Carlo, Monaco, 8–10 May 2019; pp. 1–9. [Google Scholar]
- Liu, X.; Zhu, Z.Q.; Wu, D. Evaluation of Efficiency Optimized Variable Flux Reluctance Machine for EVs/HEVs by Comparing with Interior PM Machine. In Proceedings of the 2014 17th International Conference on Electrical Machines and Systems (ICEMS) (IEEE), Hangzhou, China, 22–25 October 2014; pp. 2648–2654. [Google Scholar]
- Zhao, X.; Niu, S.; Zhang, X.; Fu, W. Flux-Modulated Relieving-DC-Saturation Hybrid Reluctance Machine with Synthetic Slot-PM Excitation for Electric Vehicle In-Wheel Propulsion. IEEE Trans. Ind. Electron. 2021, 68, 6075–6086. [Google Scholar] [CrossRef]
- Jia, S.; Qu, R.; Li, J.; Li, D. Principles of Stator DC Winding Excited Vernier Reluctance Machines. IEEE Trans. Energy Convers. 2016, 31, 935–946. [Google Scholar] [CrossRef]
- Lee, C. Vernier Motor and Its Design. IEEE Trans. Power Appar. Syst. 1963, 82, 343–349. [Google Scholar] [CrossRef]
- Lee, B.; Zhu, Z.Q.; Huang, L. Investigation of Torque Production and Torque Ripple Reduction for Six-Stator/Seven-Rotor-Pole Variable Flux Reluctance Machines. IEEE Trans. Ind. Appl. 2019, 55, 2510–2518. [Google Scholar] [CrossRef]
- Zhou, X.; Zhou, B.; Wei, J. A Novel Position-Sensorless Startup Method for DSEM. IEEE Trans. Ind. Appl. 2018, 54, 6101–6109. [Google Scholar] [CrossRef]
- Jia, S.; Qu, R.; Kong, W.; Li, D.; Li, J. Flux Modulation Principles of DC-Biased Sinusoidal Current Vernier Reluctance Machines. IEEE Trans. Ind. Appl. 2018, 54, 3187–3196. [Google Scholar] [CrossRef]
- Huang, L.R.; Feng, J.H.; Guo, S.Y.; Shi, J.X.; Chu, W.Q.; Zhu, Z.Q. Analysis of Torque Production in Variable Flux Reluctance Machines. IEEE Trans. Energy Convers. 2017, 32, 1297–1308. [Google Scholar] [CrossRef]
- Huang, L.; Zhu, Z.Q.; Feng, J.; Guo, S.; Shi, J.X.; Chu, W. Analysis of Stator/Rotor Pole Combinations in Variable Flux Reluctance Machines Using Magnetic Gearing Effect. IEEE Trans. Ind. Appl. 2019, 55, 1495–1504. [Google Scholar] [CrossRef]
- Bianchi, N.; Dai Pre, M. Use of the Star of Slots in Designing Fractional-Slot Single-Layer Synchronous Motors. IEE Proc. Electr. Power Appl. 2006, 153, 459. [Google Scholar] [CrossRef]
- Gaussens, B.; Hoang, E.; de la Barriere, O.; Saint-Michel, J.; Lecrivain, M.; Gabsi, M. Analytical Approach for Air-Gap Modeling of Field-Excited Flux-Switching Machine: No-Load Operation. IEEE Trans. Magn. 2012, 48, 2505–2517. [Google Scholar] [CrossRef]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| RESM | VFRM | |
|---|---|---|
| Stator slot number | 12 | 12 |
| Rotor pole number | 20 | 10 |
| Electrical frequency | ||
| Temporal order | 10 | 10 |
| Spatial order | 10 | 10 ± 6n (n = 1, 3, 5…) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gu, X.; Bianchi, N.; Zhang, Z. Analysis and Preliminary Design of Variable Flux Reluctance Machines: A Perspective from Working Field Harmonics. Vehicles 2024, 6, 571-589. https://doi.org/10.3390/vehicles6010026
Gu X, Bianchi N, Zhang Z. Analysis and Preliminary Design of Variable Flux Reluctance Machines: A Perspective from Working Field Harmonics. Vehicles. 2024; 6(1):571-589. https://doi.org/10.3390/vehicles6010026
Chicago/Turabian StyleGu, Xiangpei, Nicola Bianchi, and Zhuoran Zhang. 2024. "Analysis and Preliminary Design of Variable Flux Reluctance Machines: A Perspective from Working Field Harmonics" Vehicles 6, no. 1: 571-589. https://doi.org/10.3390/vehicles6010026
APA StyleGu, X., Bianchi, N., & Zhang, Z. (2024). Analysis and Preliminary Design of Variable Flux Reluctance Machines: A Perspective from Working Field Harmonics. Vehicles, 6(1), 571-589. https://doi.org/10.3390/vehicles6010026