

Low-Cost DTC Drive Using Four-Switch Inverter for Low Power Ranges


Abstract
1. Introduction
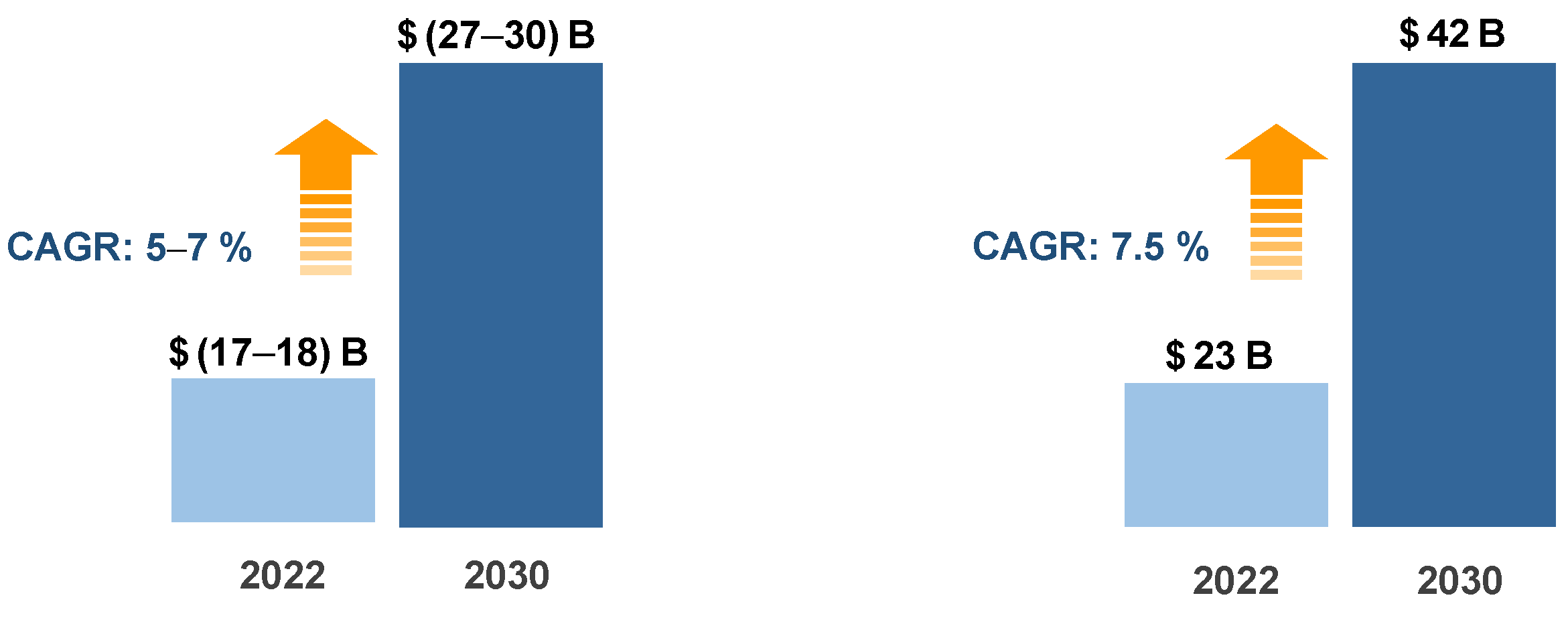
1.1. Market Size of AC Drives
1.2. History of DTC and Pioneer Contributors
1.3. Evolution toward High-Performance AC Drive
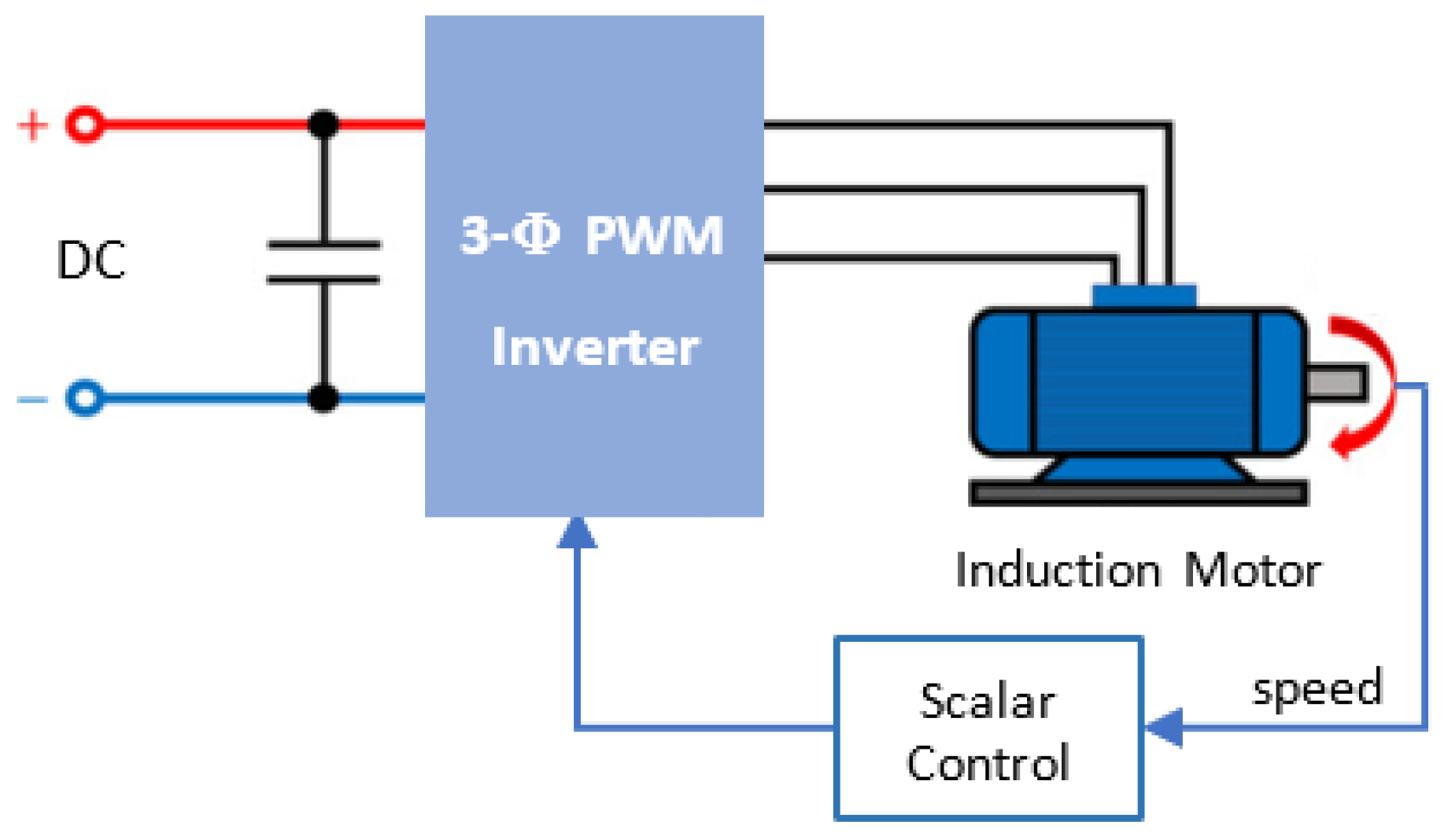
- Scalar Control Drives:
- 2.
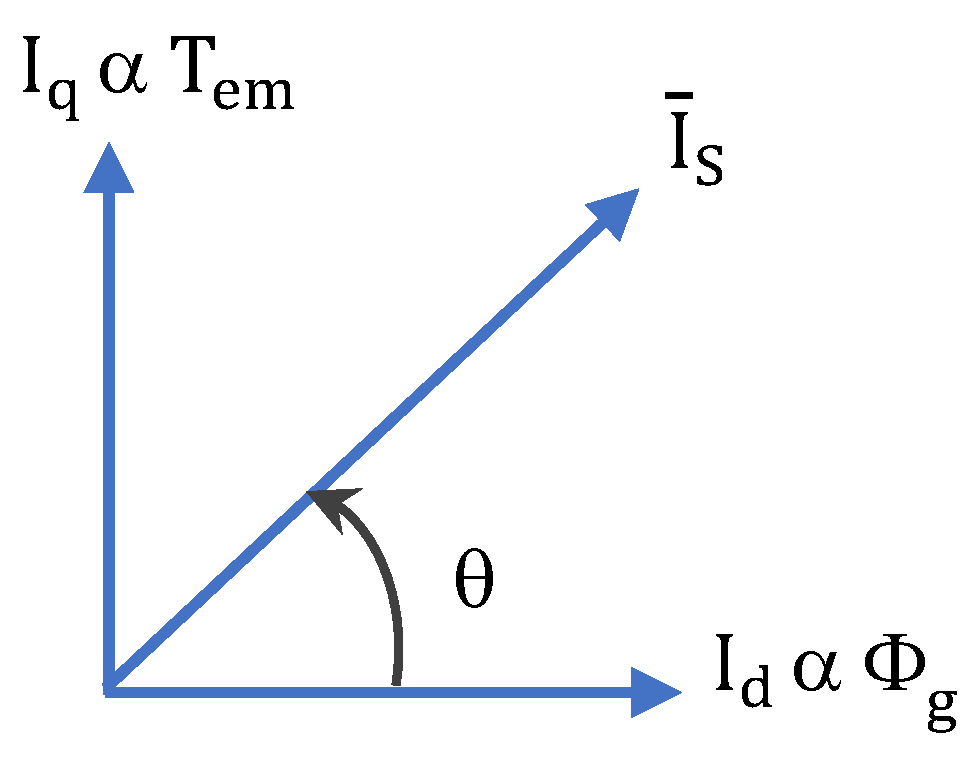
- Vector Control (VC) or Field Oriented Control (FOC) Drives:
- 3.
- Direct Torque Control (DTC) Drives:
2. Principles of the DTC Strategy Using a B6 Inverter
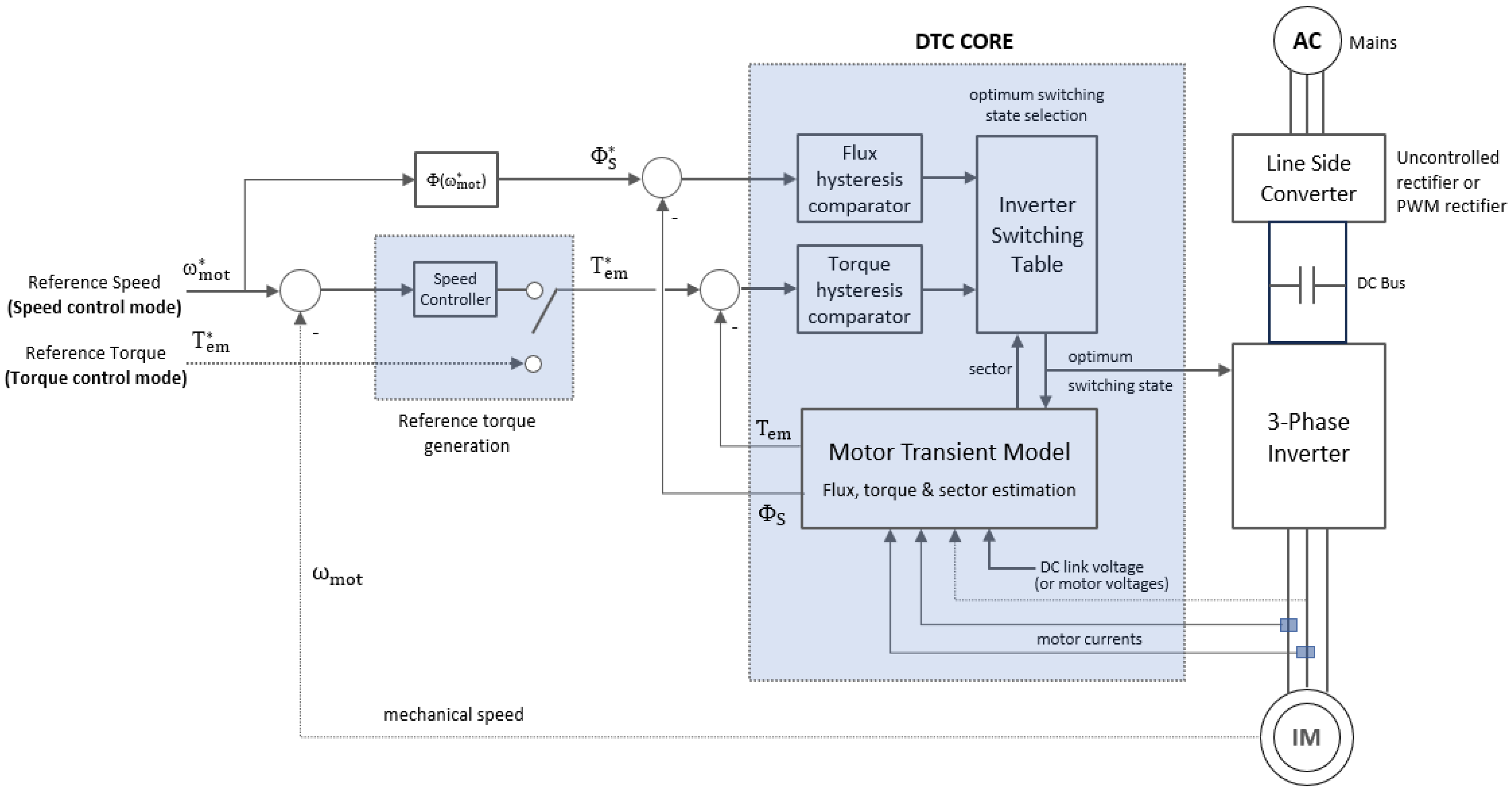
2.1. Block Diagram and Core Components of DTC
- Motor transient model to compute the stator flux vector and electromagnetic torque;
- Dual hysteresis on/off controllers: one for the flux and the other for the torque;
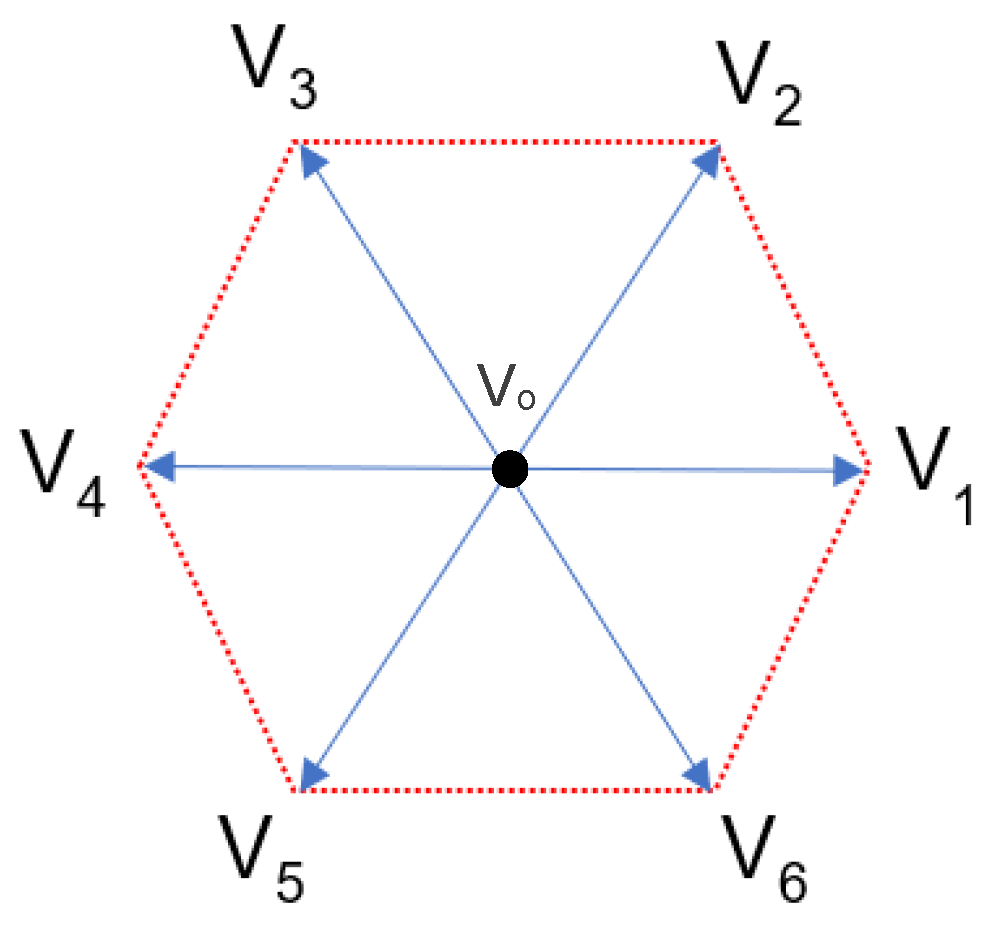
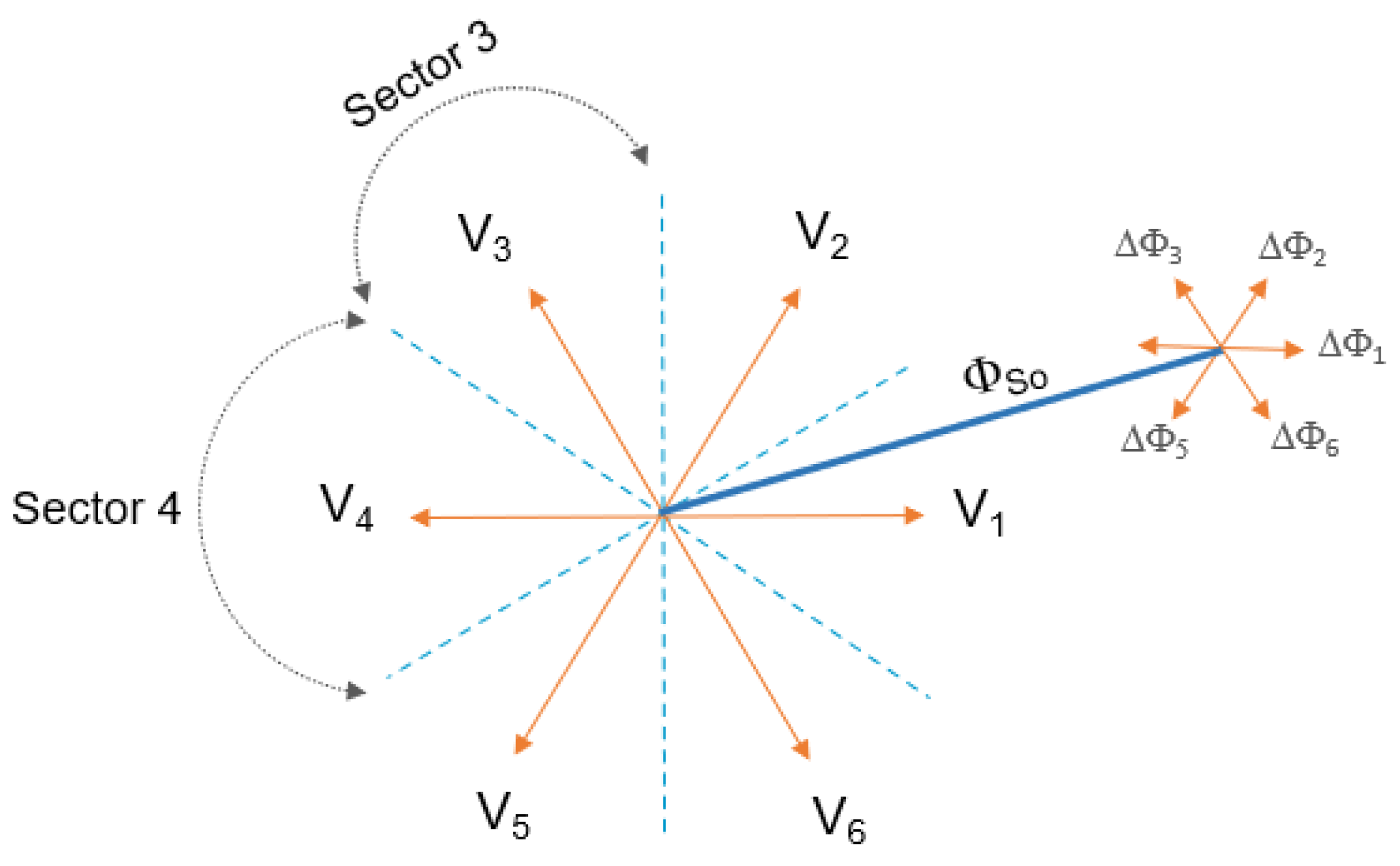
2.2. Space Vector Representation
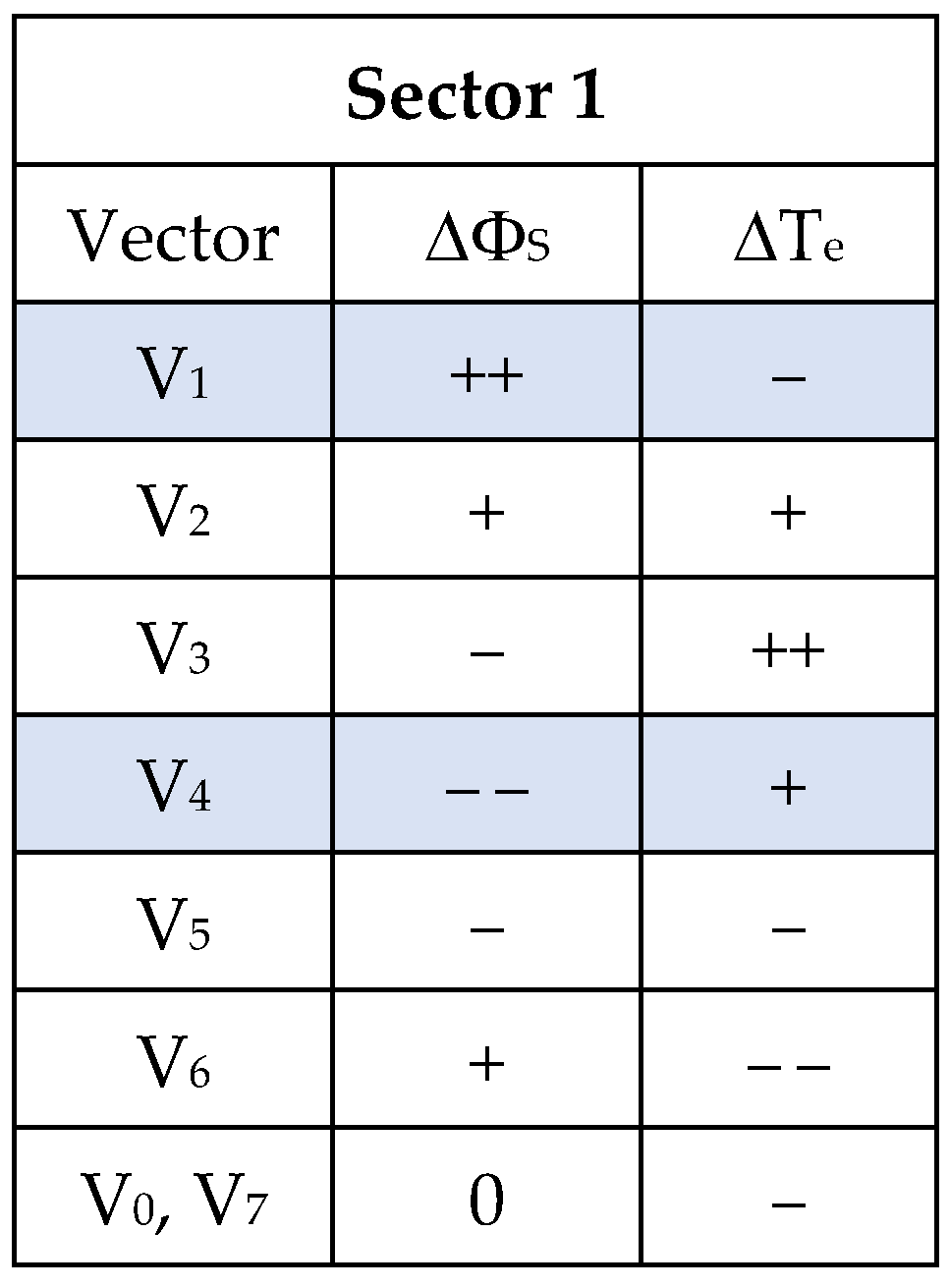
2.3. Control of the Stator Flux and Electromagnetic Torque
2.4. Machine Model Used with the DTC
2.4.1. Computation of Stator Voltage Vector
2.4.2. Computation of Stator Current Vector
2.4.3. Computation of Stator Flux Vector
2.4.4. Computation of Electromagnetic Torque
3. Advantages and Drawbacks (Limitations) of DTC
3.1. Advantages of DTC
- DTC provides quick torque and flux response [21];
- With DTC, rated electromagnetic torque can be produced at zero speed;
- It is based on a machine model with moderate complexity;
- The DTC system can be implemented with conventional data acquisition cards;
- The conventional algorithm of the DTC needs a few machine parameters;
- Sensorless operation is possible with good accuracy.
3.2. Disadvantages and Limitations of DTC
- The conventional DTC scheme is not appropriate for servo applications [22];
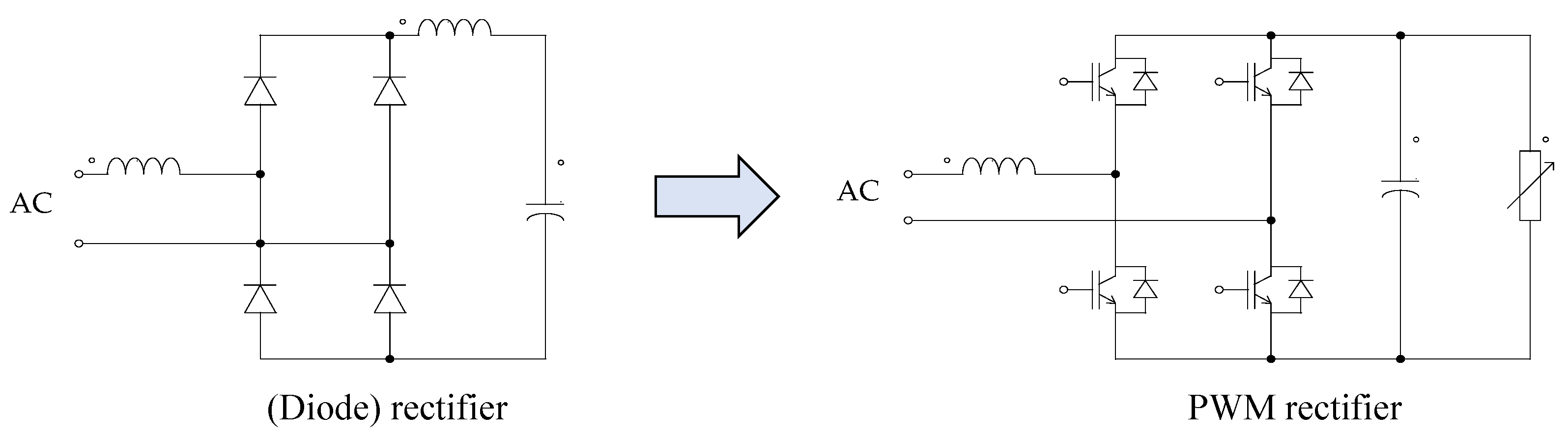
4. DTC Using a Four-Switch Inverter as a Non-Conventional Inverter Scheme
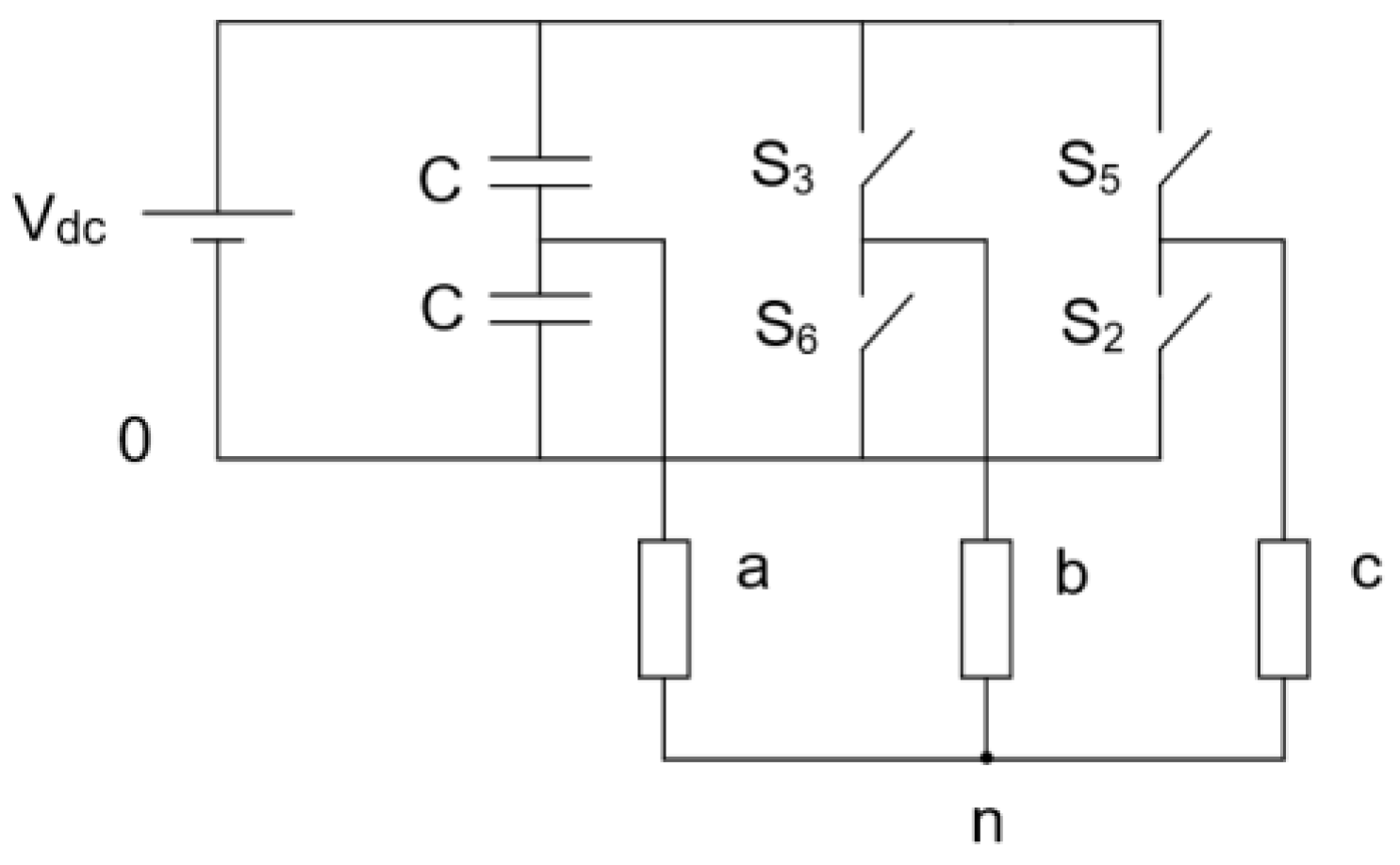
4.1. Operation of Four-Switch Inverter
- Since the incorporation of PWM LSC increases the overall cost of the drive, there is a desire to reduce the cost and achieve an economical AC drive with a satisfactory performance.
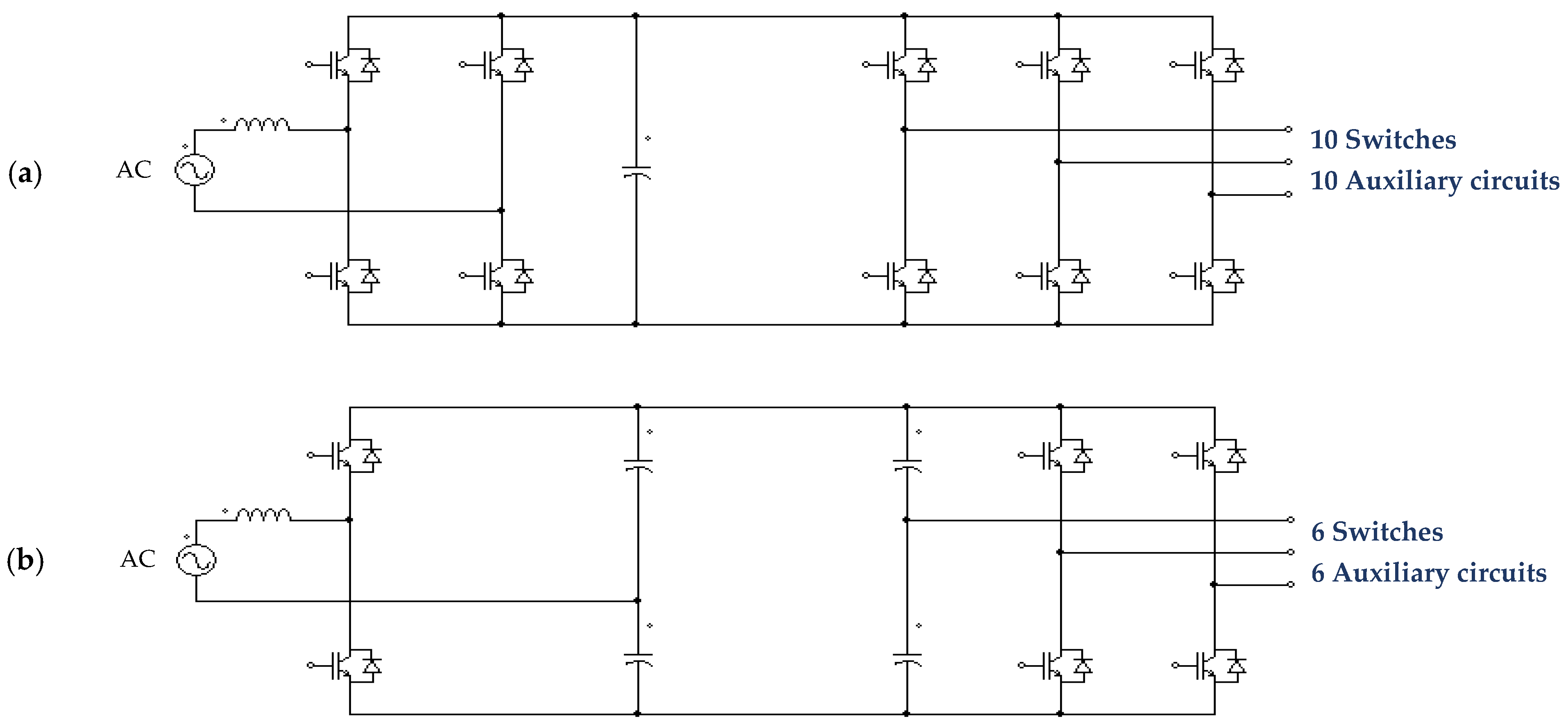
4.2. Possible Configurations of Low-Cost AC Drives
4.3. Space Vector Representation of the Four-Switch Inverter
- The vectors are not equal; they have different magnitudes;
- The vectors are displaced 90° electrically from each other [34];
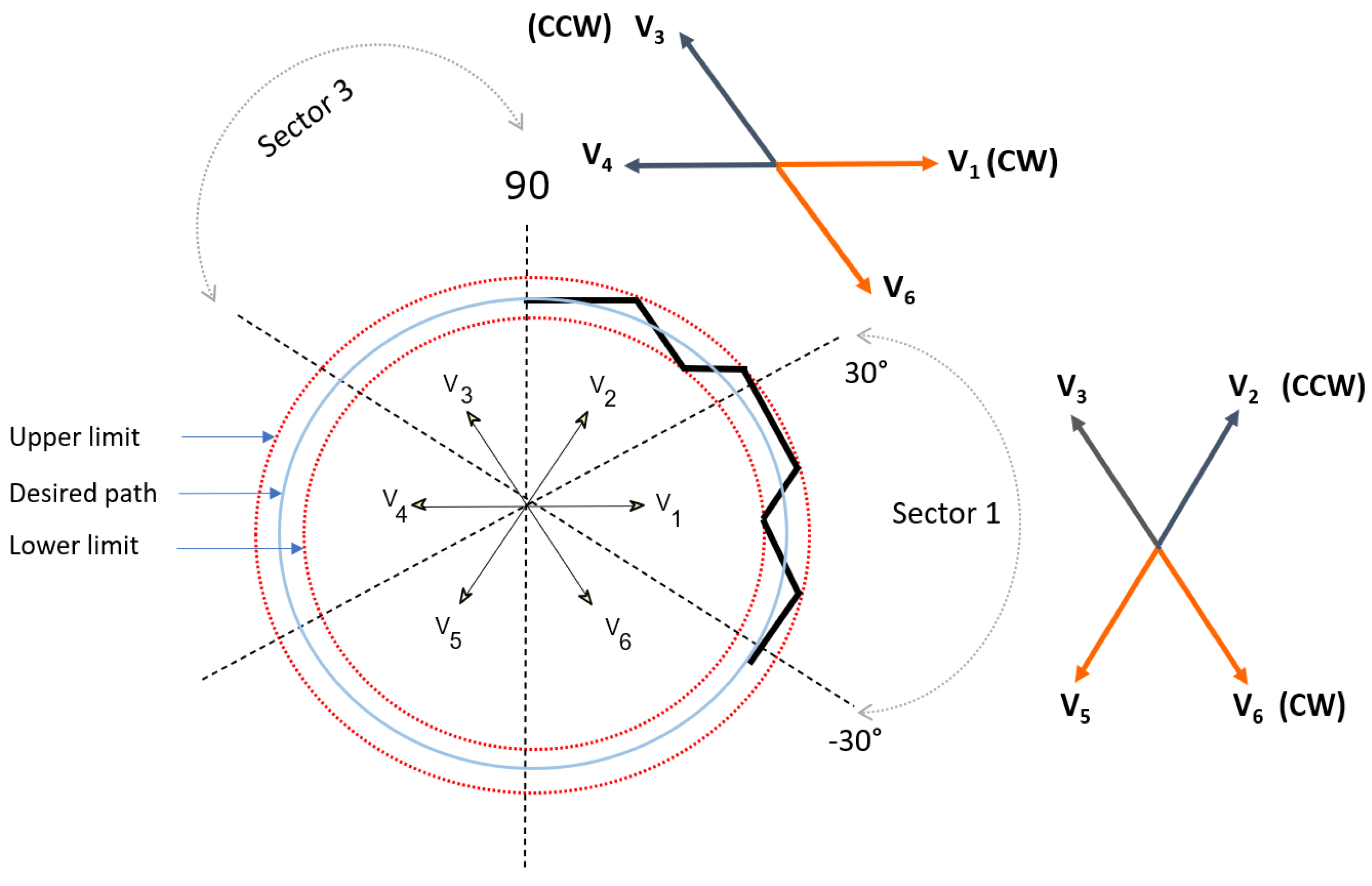
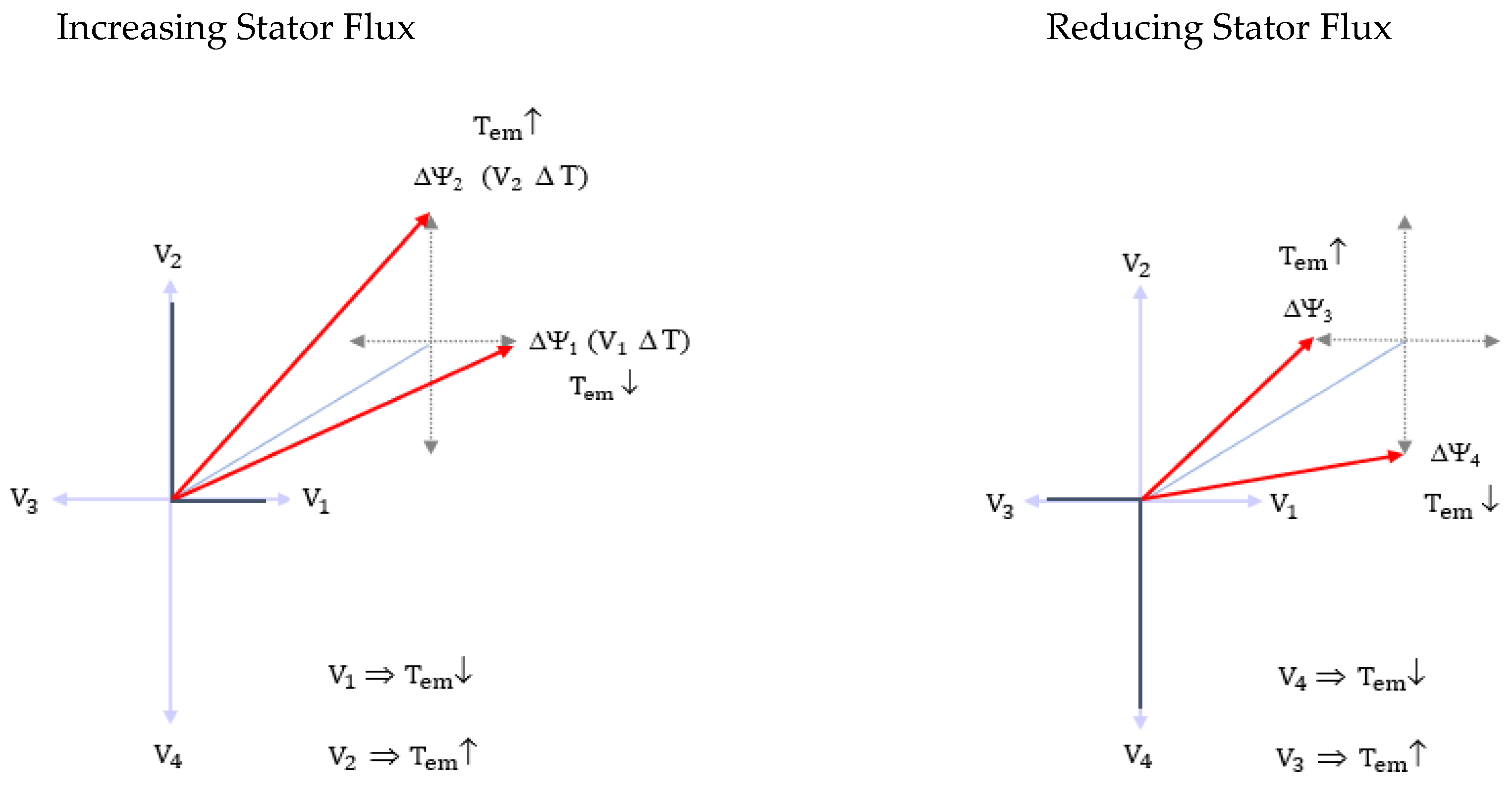
4.4. Principles of Flux and Torque Control with the Four-Switch Inverter
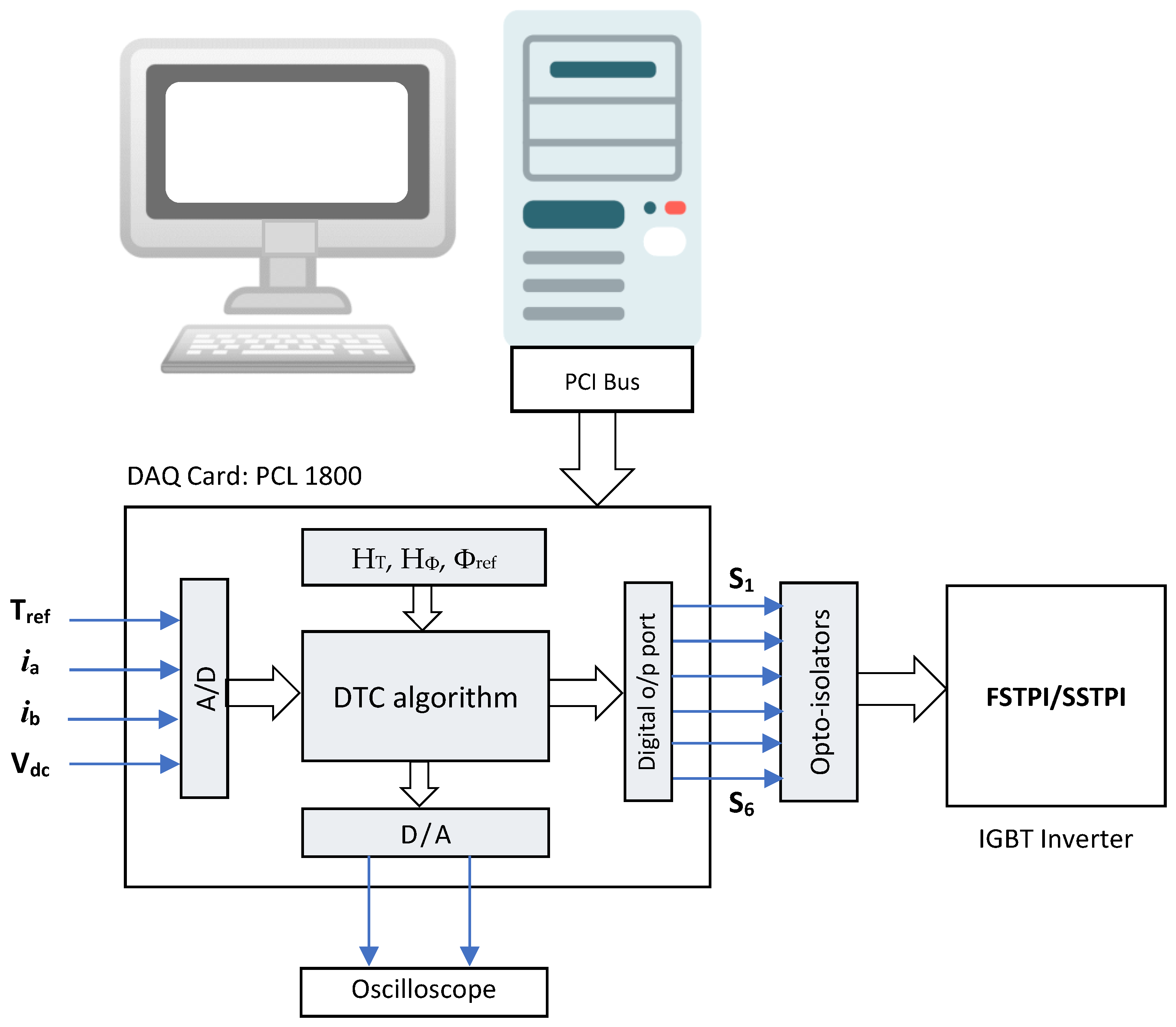
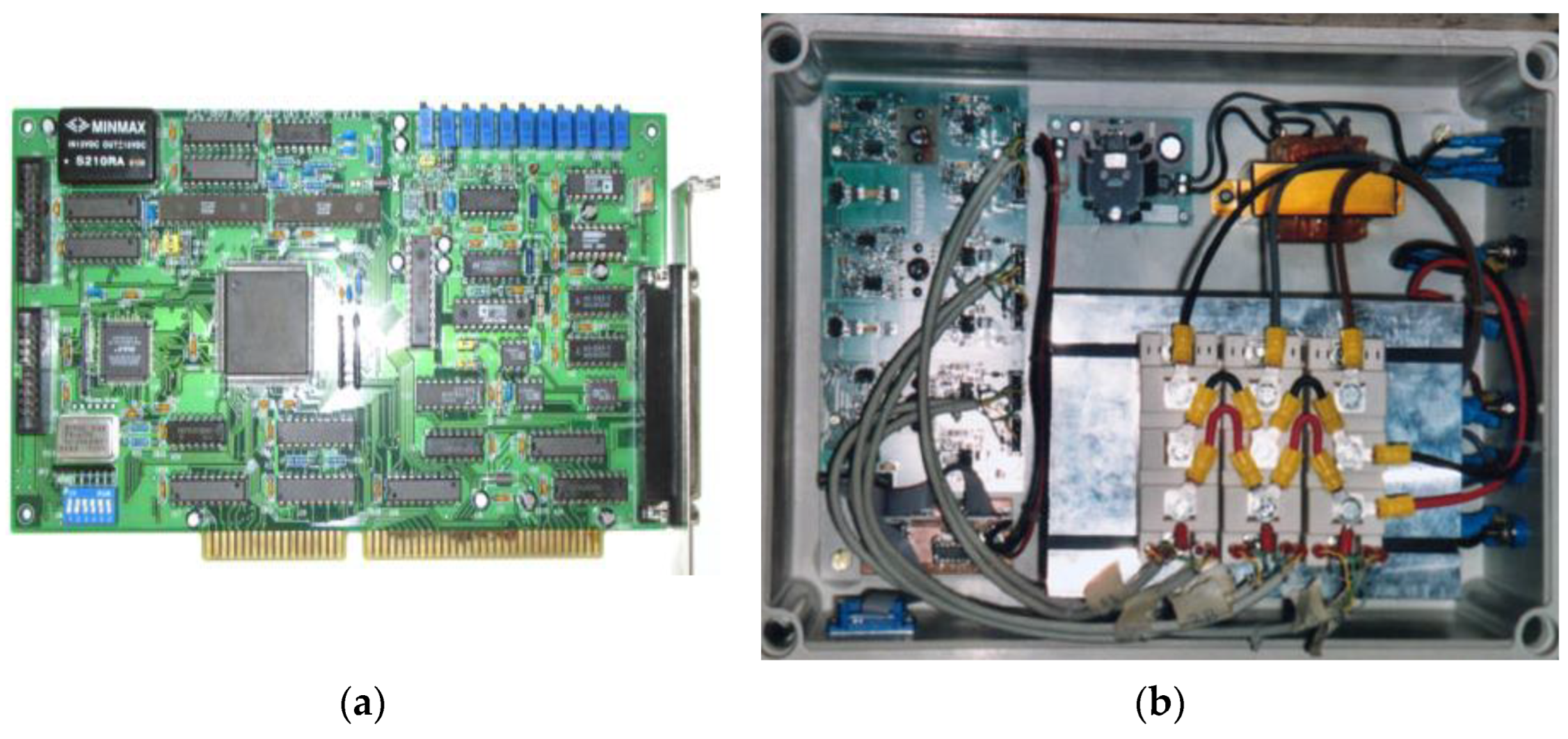
5. Experimental Setup
- ▪
- Three-phase IGBT inverter (with an open control feature) is constructed with all necessary auxiliary circuits (isolation, drive, over-current protection, and short circuit protection). One inverter leg can be disabled and substituted by two identical capacitors (1200 μF) to select between FSTPI and SSTPI topologies;
- ▪
- A data acquisition card PCL-1800 (using C code) is used to carry out all software routines of the DTC algorithm. The parameters of the IM (stator resistance and number of poles) and the set point of the stator flux are plugged into the program. They can be modified according to the motor rating. The reference electromagnetic torque is an external analog input to the data acquisition card;
- ▪
- Two Hall-effect current transducers are utilized to measure the motor phase currents;
- ▪
- A Hall-effect voltage transducer is employed to measure the DC link voltage to calculate the orthogonal components of the stator voltage vector (Vα and Vβ).
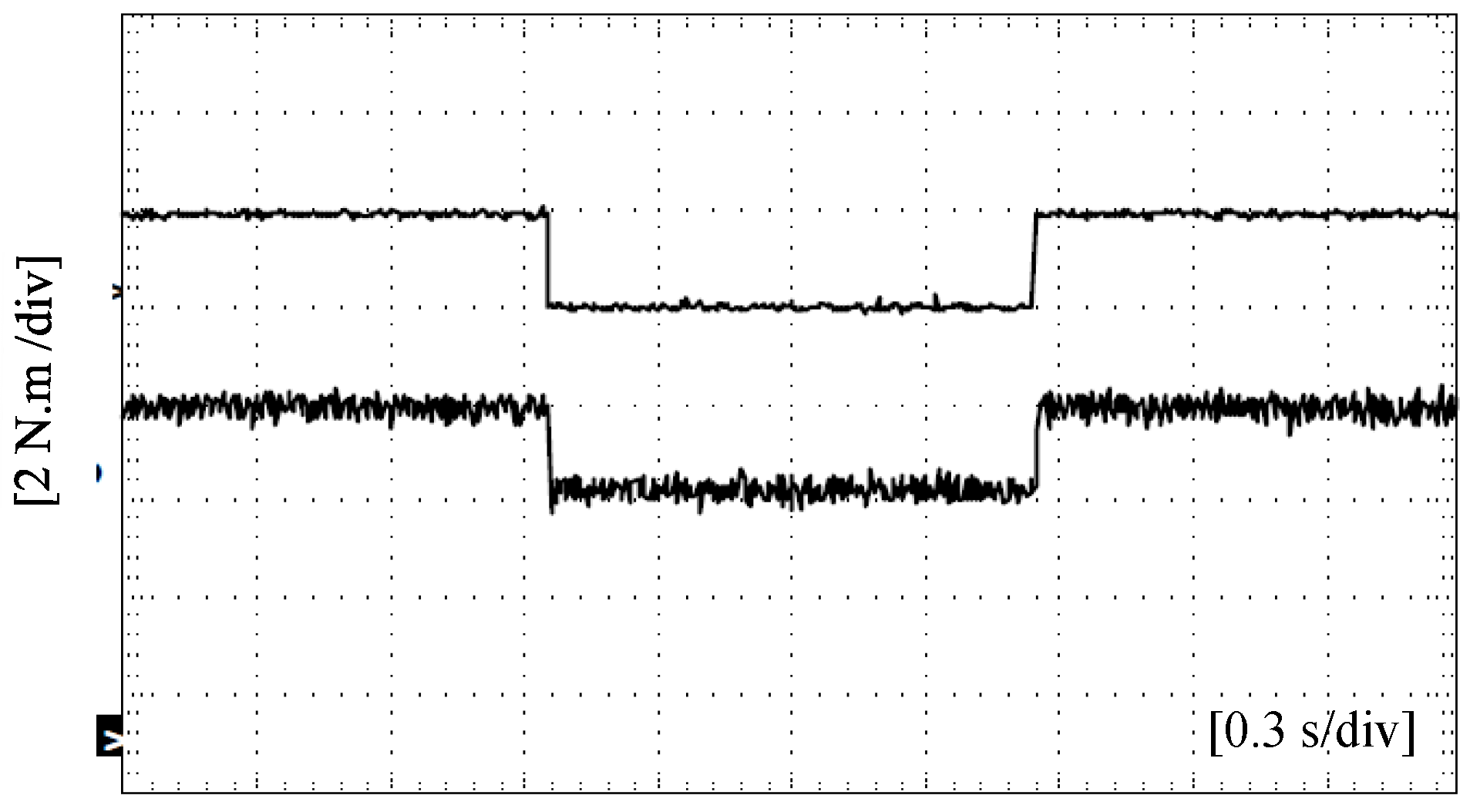
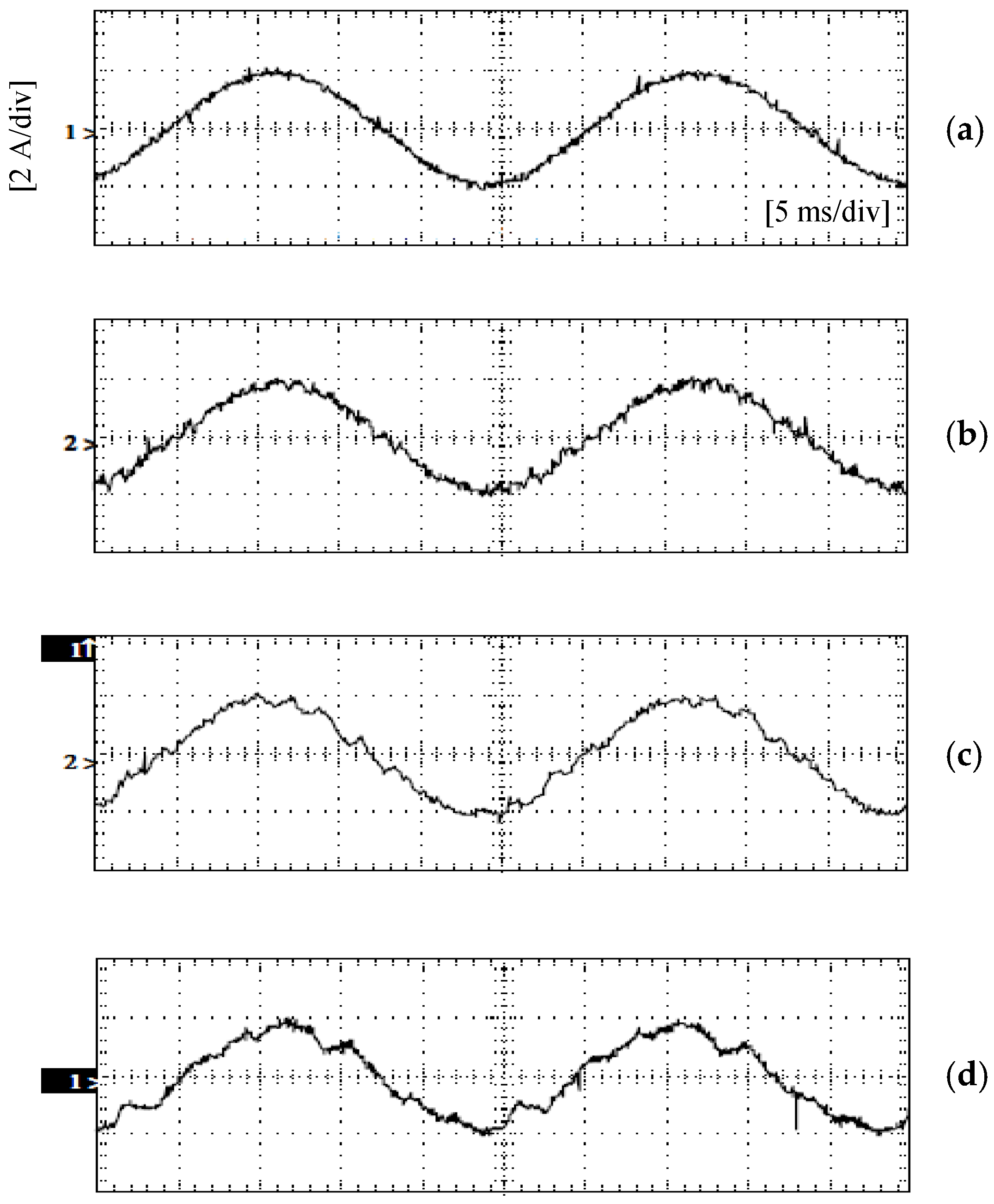
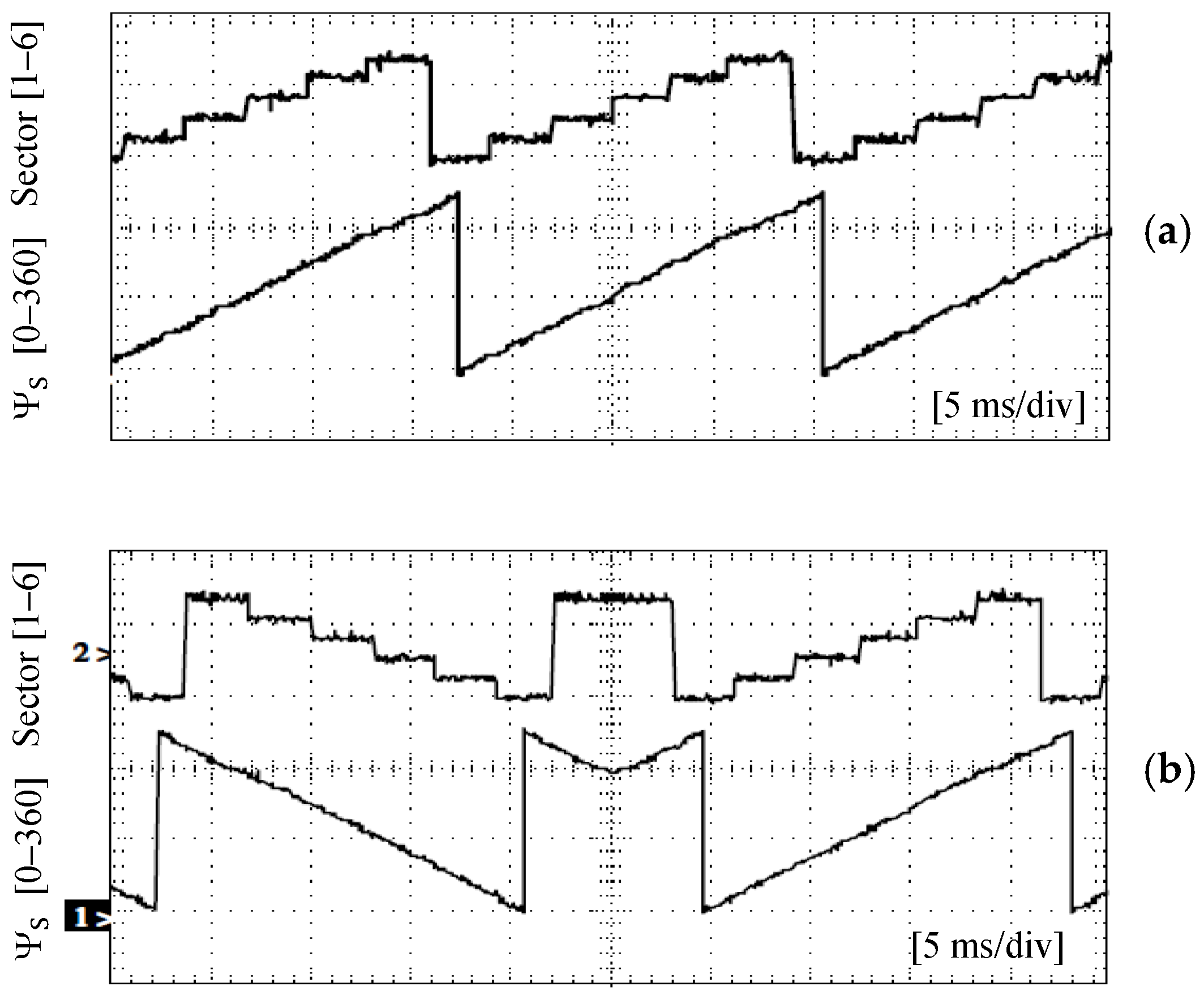
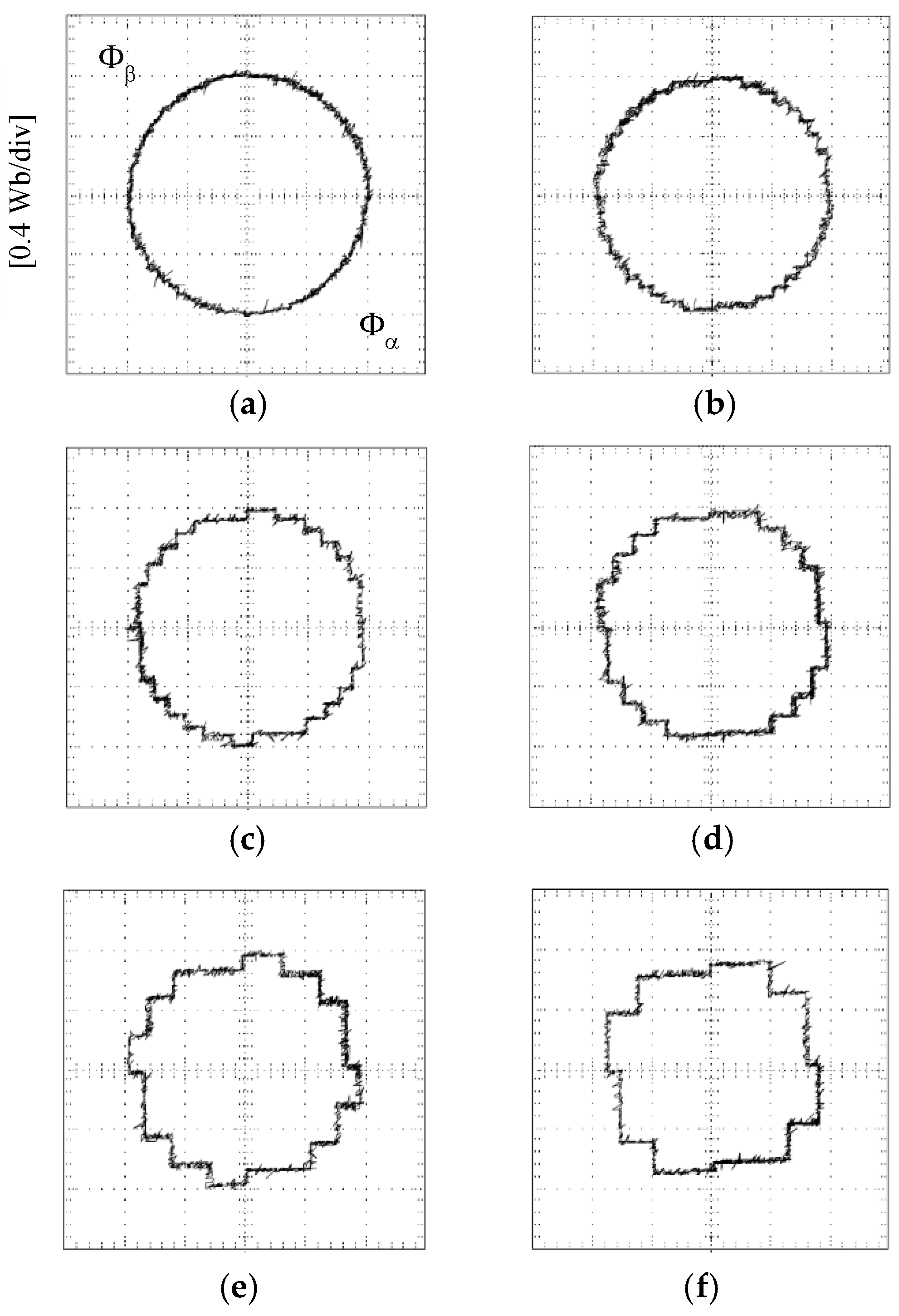
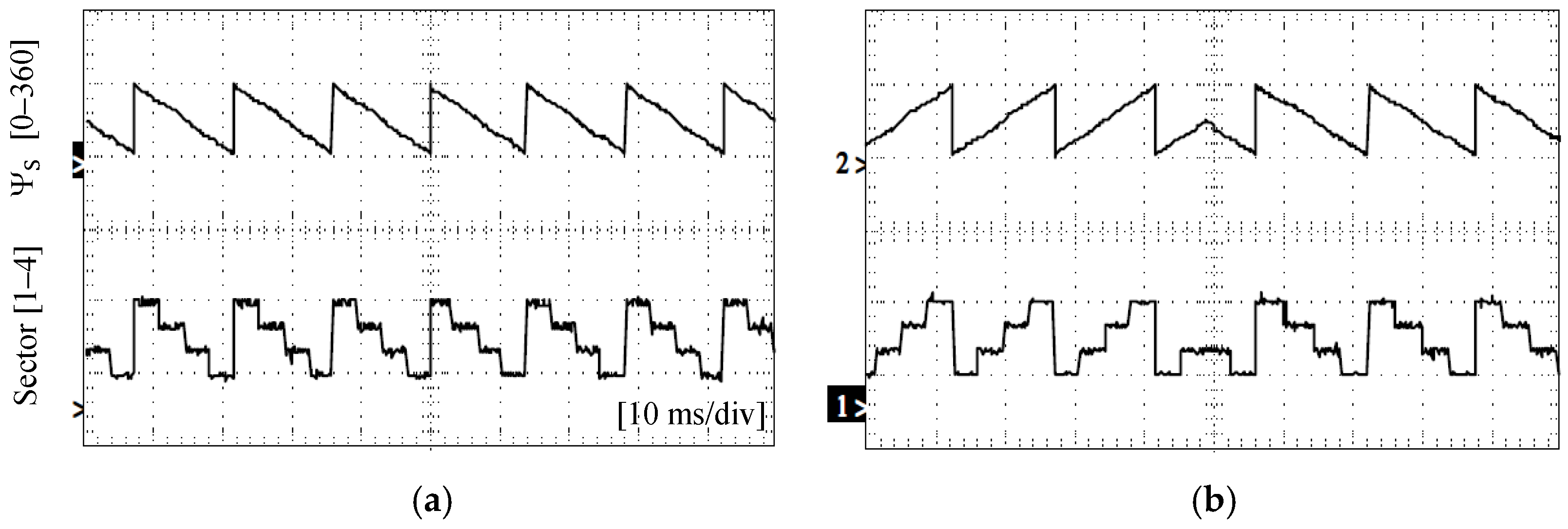
6. Experimental Results of the Investigated DTC Systems
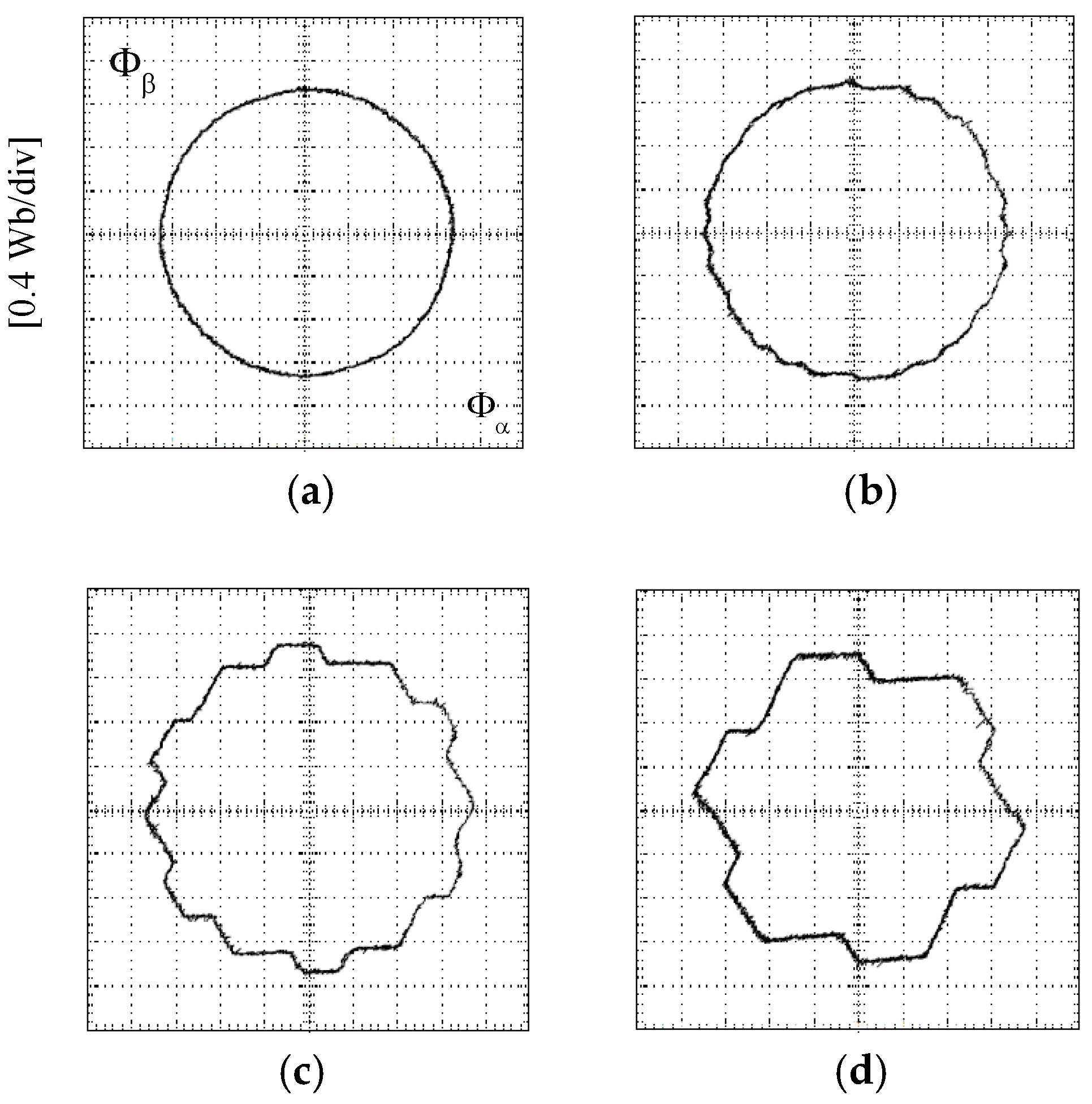
6.1. Experimental Results of the DTC System Using a B6 Inverter
6.2. Experimental Results of DTC Using a B4 Inverter
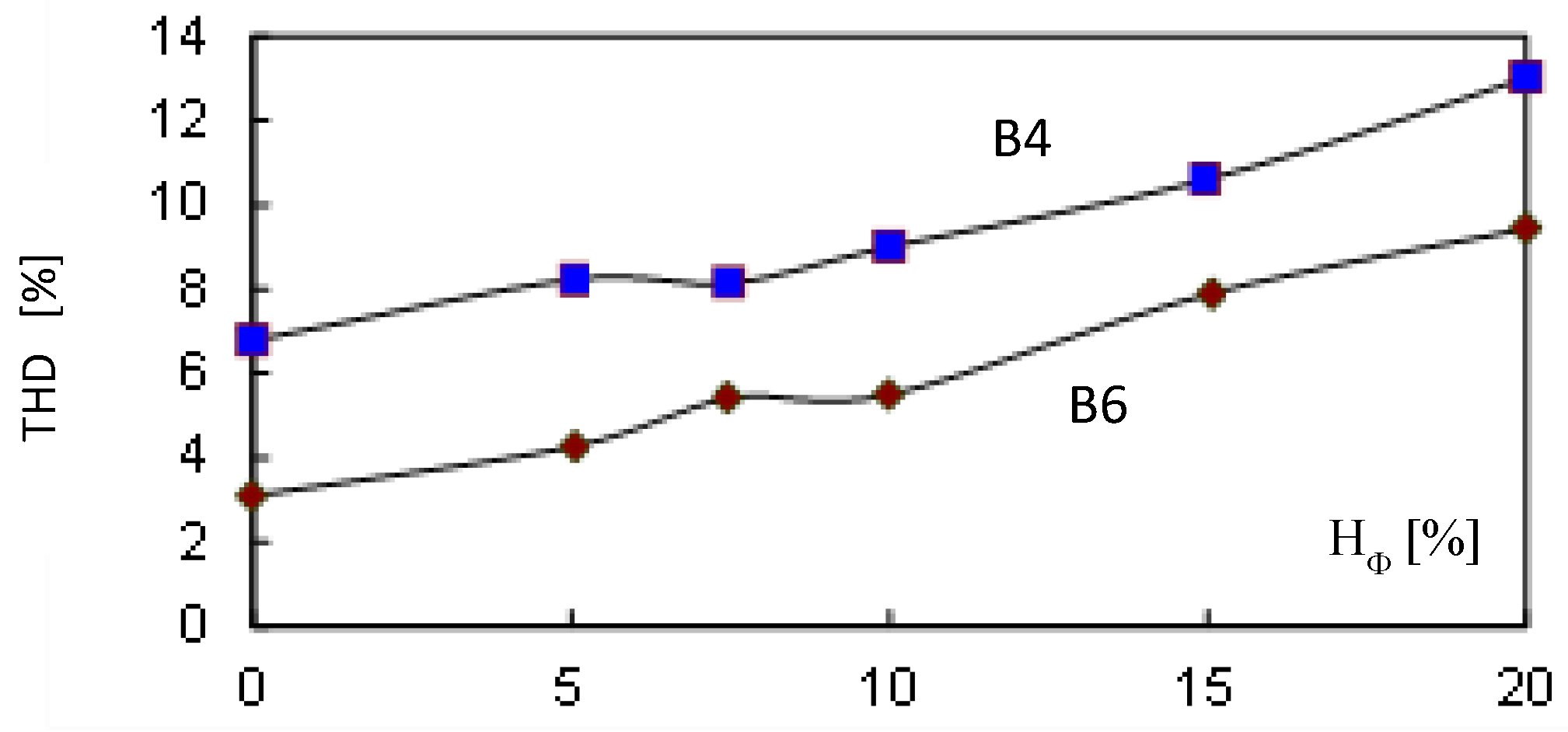
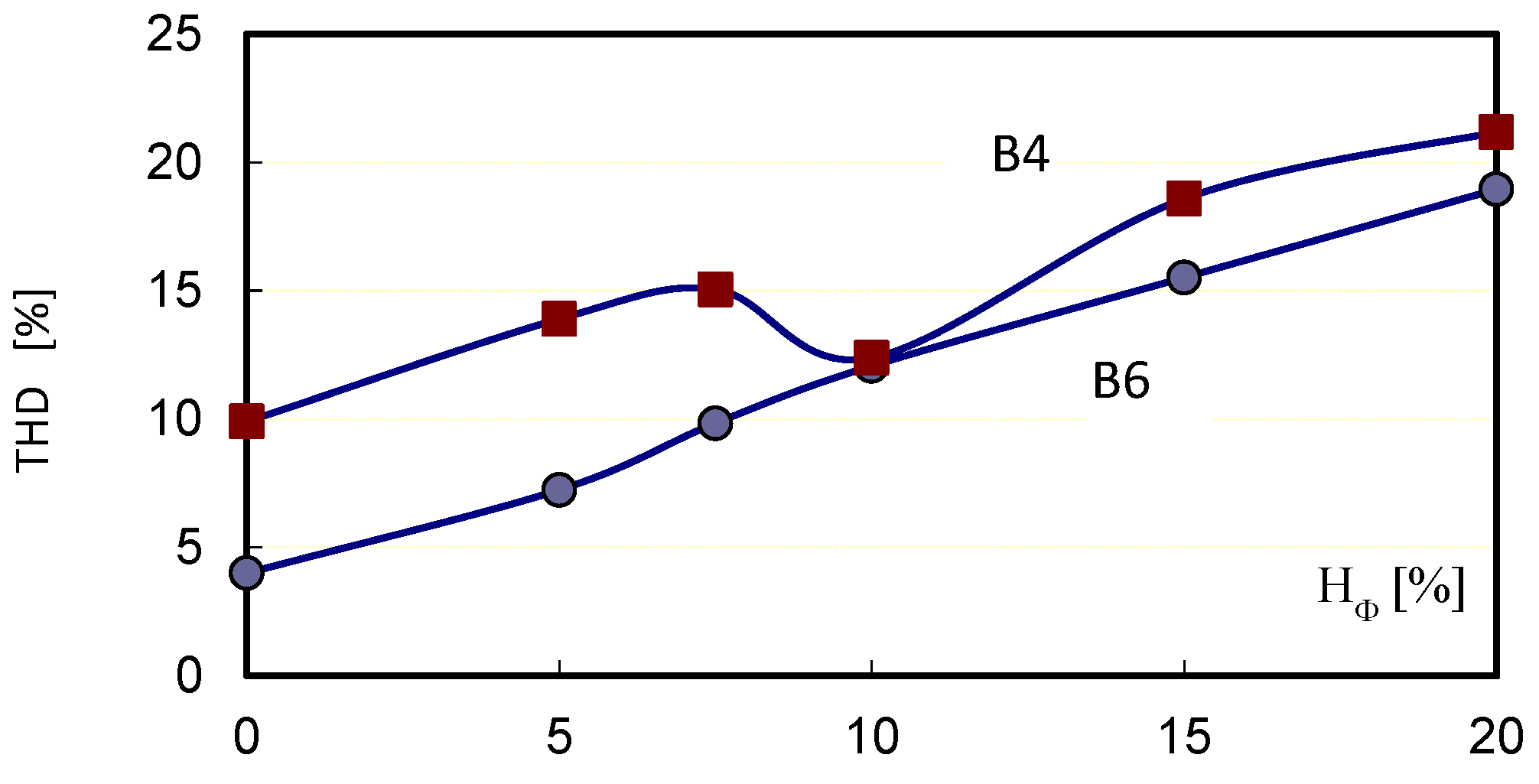
6.3. Quantitative Comparison between Both DTC Systems
7. Conclusions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| BLDC | Brushless DC motor |
| CCW | Counterclockwise |
| CW | Clockwise |
| DTC | Direct torque control |
| DSP | Digital signal processor |
| FO | Field orientation |
| FPGA | Field programmable gate array |
| FSTPI | Four-switch three-phase inverter |
| THD | Total harmonic distortion |
| SSTPI | Six-switch three-phase inverter |
| HIL | Hardware in the loop |
| IM | Induction motor |
| EV | Electric vehicle |
| MPC | Model predictive control |
| PC | Personal computer |
| PCI | Peripheral component interconnect |
| PM | Permanent magnet |
| PWM | Pulse width modulation |
| RISC | Reduced instruction set computer |
| SC | Scalar control |
| SRM | Switched reluctance motor |
| SVM | Space vector modulation |
| VC | Vector control |
| VSI | Voltage source inverter |
| Symbols | |
| Va | Armature voltage of a separately excited DC motor (V) |
| Vf | Field voltage of a separately excited DC motor (V) |
| Ia | Armature current of a separately excited DC motor (A) |
| If | Field current of separately excited DC motor (A) |
| Φ | Magnetic flux of separately excited DC motor (Wb) |
| Reference value of electromagnetic torque (Nm) | |
| Tem | Actual electromagnetic torque (Nm) |
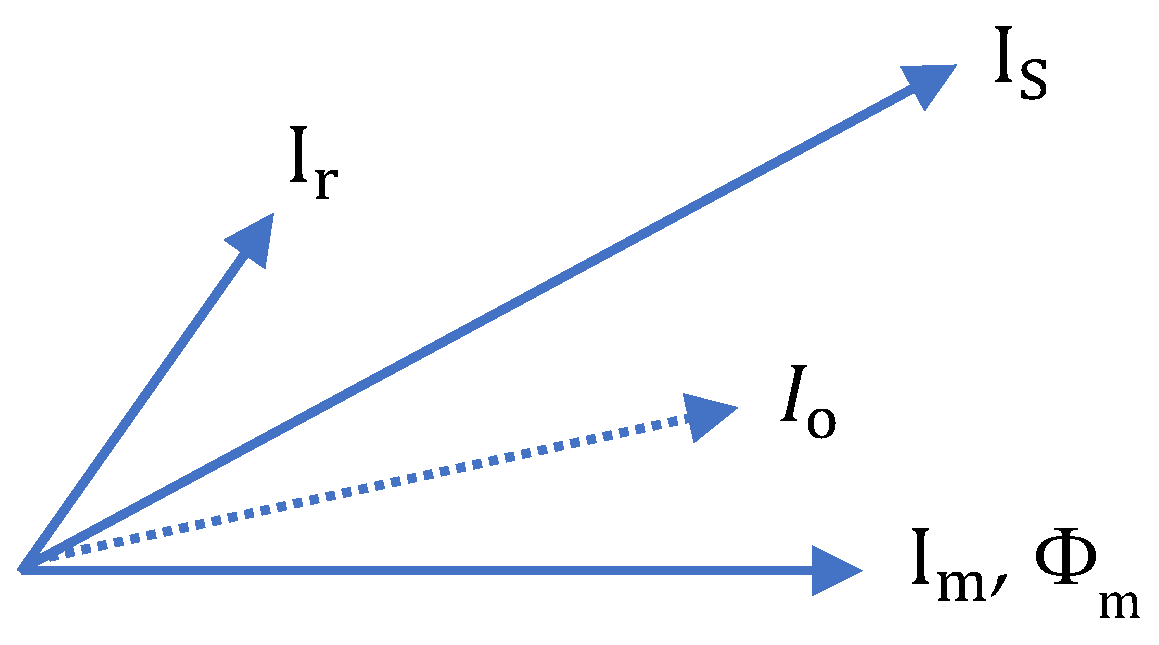
| Stator current of three-phase induction motor (A) | |
| Rotor current of three-phase induction motor (A) | |
| Magnetizing current of three-phase induction motor (A) | |
| Airgap flux of three-phase induction motor (Wb) | |
| Stator flux vector (Wb) | |
| , | Stator flux components in the stationary reference frame (Wb) |
| Id, Iq | Direct and Quadrature components of stator current (A) |
| Stator voltage space vector (V) | |
| S1, S3, S5 | Switching states of the inverter power transistors |
| V1 → V6 | Discrete stator voltage space vector |
| VDC | DC link voltage of the VSI (V) |
| , | Instantaneous values of stator voltage components in stationary reference frame (V) |
| , | Instantaneous values of stator current components in stationary reference frame (A) |
| HΦ | Hysteresis band of flux controller (%) |
| HT | Hysteresis band of torque controller (%) |
| Instantaneous flux angle of stator flux vector (deg or rad) | |
| ΔΦS | Error between reference and actual stator flux (Wb) |
| ΔTe | Error between reference and actual electromagnetic torque (Nm) |
| Reference motor speed (rpm) | |
| Actual motor speed (rpm) |
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electric Machine | |
| Type | squirrel cage IM |
| Power rating | 1.35 kW |
| P | 4 poles |
| Rs | 4.59 Ω |
| Rr | 3.95 Ω |
| Lm | 0.443 H |
| Ls | 0.613 H |
| Lr | 0.464 H |
| Hall-effect current transducers | LA 55P |
| Hall-effect voltage transducers | LV 25P |
| Capacitors (C) of B4 inverter | 2 × 1 mF |
References
- AC Drives Market Report by Components (Electrical Supply, Motor, Process Interface), Voltage (Low Voltage, Medium Voltage), Power Rating, Size, Application, Industry—Global Forecast 2023–2030. Available online: https://www.360iresearch.com/library/intelligence/ac-drives (accessed on 1 December 2023).
- Global AC Drives Industry Research Report, Growth Trends and Competitive Analysis 2022–2028. Available online: https://www.360researchreports.com/global-ac-drives-industry-21727719 (accessed on 1 September 2023).
- AC Drive Market Report. Available online: https://introspectivemarketresearch.com/reports/ac-drives-market/ (accessed on 1 September 2023).
- Tiitinen, P.; Surandra, M. The next generation motor control method, DTC direct torque control. In Proceedings of the International Conference on Power Electronics, Drives and Energy Systems for Industrial Growth, New Delhi, India, 8–11 January 1996; Volume 1, pp. 37–43. [Google Scholar] [CrossRef]
- Takahashi, I.; Noguchi, T. A New Quick-Response and High-Efficiency Control Strategy of an Induction Motor. IEEE Trans. Ind. Appl. 1986, 22, 820–827. [Google Scholar] [CrossRef]
- Noguchi, T.; Takahashi, I. Quick torque response control of an induction motor based on a new concept. In Proceedings of the IEEJ Technical Meeting on Rotating Machine RM84-76, Japan, September 1984; pp. 61–70. [Google Scholar]
- Depenbrock, M. Direct self-control (DSC) of inverter-fed induction machine. IEEE Trans. Power Electron. 1988, 3, 420–429. [Google Scholar] [CrossRef]
- Depenbrock, M. Direkte selbstregelung (DSR) für hochdynamische drehfeldantriebe mitstromrich terspeisung. etz-Archiv 1985, 7, 211–218. [Google Scholar]
- Kumar, R.H.; Iqbal, A.; Lenin, N.C. Review of recent advancements of direct torque control in induction motor drives—A decade of progress. IET Power Electron. 2018, 11, 1–15. [Google Scholar] [CrossRef]
- El Ouanjli, N.; Derouich, A.; El Ghzizal, A.; Motahhir, S.; Chebabhi, A.; El Mourabit, Y.; Taoussi, M. Modern improvement techniques of direct torque control for induction motor drives—A review. Prot. Control Mod. Power Syst. 2019, 4, 1–12. [Google Scholar] [CrossRef]
- Blaschke, F. Dab Prinzip der Feld-otienfiencng, die. Gnrndlage far die Tranmctor-Regelung wn D d—Jiddmaschinen. Siemens-Z. 1971, 45, 757–760. [Google Scholar]
- Wu, X.; Huang, W.; Lin, X.; Jiang, W.; Zhao, Y.; Zhu, S. Direct Torque Control for Induction Motors Based on Minimum Voltage Vector Error. IEEE Trans. Ind. Electron. 2021, 68, 3794–3804. [Google Scholar] [CrossRef]
- Payami, S.; Behera, R.K. An Improved DTC Technique for Low-Speed Operation of a Five-Phase Induction Motor. IEEE Trans. Ind. Electron. 2017, 64, 3513–3523. [Google Scholar] [CrossRef]
- Ben Salem, F. DTC-SVM Approaches of an Induction Motor Dedicated to Position Control Applications. 2019. Available online: https://openresearchlibrary.org/content/f7f2557d-411c-4118-99d7-6a61c75e8f9c (accessed on 14 April 2024). [CrossRef]
- Ammar, A.; Bourek, A.; Benakcha, A. Robust SVM-direct torque control of induction motor based on sliding mode controller and sliding mode observer. Front. Energy 2020, 14, 836–849. [Google Scholar] [CrossRef]
- Alkorta, P.; Barambones, O.; Cortajarena, J.A.; Martija, I.; Maseda, F.J. Effective Position Control for a Three-Phase Motor. Electronics 2020, 9, 241. [Google Scholar] [CrossRef]
- Payami, S.; Behera, R.K.; Iqbal, A. DTC of Three-Level NPC Inverter Fed Five-Phase Induction Motor Drive with Novel Neutral Point Voltage Balancing Scheme. IEEE Trans. Power Electron. 2017, 33, 1487–1500. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Bak, Y.; Lee, K.-B. Fast Torque Control and Minimized Sector-Flux Droop for Constant Frequency Torque Controller Based DTC of Induction Machines. IEEE Trans. Power Electron. 2019, 34, 12141–12153. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Lee, K.-B. Enhanced Performance of Constant Frequency Torque Controller-Based Direct Torque Control of Induction Machines with Increased Torque-Loop Bandwidth. IEEE Trans. Ind. Electron. 2020, 67, 10168–10179. [Google Scholar] [CrossRef]
- Cavus, B.; Aktas, M. MPC-Based Flux Weakening Control for Induction Motor Drive with DTC for Electric Vehicles. IEEE Trans. Power Electron. 2022, 38, 4430–4439. [Google Scholar] [CrossRef]
- Zhang, Z.; Liu, X. A Duty Ratio Control Strategy to Reduce Both Torque and Flux Ripples of DTC for Permanent Magnet Synchronous Machines. IEEE Access 2019, 7, 11820–11828. [Google Scholar] [CrossRef]
- Yuan, T.; Wang, D.; Wang, X.; Wang, X.; Sun, Z. High-Precision Servo Control of Industrial Robot Driven by PMSM-DTC Utilizing Composite Active Vectors. IEEE Access 2019, 7, 7577–7587. [Google Scholar] [CrossRef]
- Holakooie, M.H.; Ojaghi, M.; Taheri, A. Direct Torque Control of Six-Phase Induction Motor with a Novel MRAS-Based Stator Resistance Estimator. IEEE Trans. Ind. Electron. 2018, 65, 7685–7696. [Google Scholar] [CrossRef]
- Sangsefidi, Y.; Ziaeinejad, S.; Mehrizi-Sani, A.; Pairodin-Nabi, H.; Shoulaie, A. Estimation of Stator Resistance in Direct Torque Control Synchronous Motor Drives. IEEE Trans. Energy Convers. 2014, 30, 626–634. [Google Scholar] [CrossRef]
- He, L.; Cheng, S.; Du, Y.; Harley, R.G.; Habetler, T.G. Stator Temperature Estimation of Direct-Torque-Controlled Induction Machines via Active Flux or Torque Injection. IEEE Trans. Power Electron. 2014, 30, 888–899. [Google Scholar] [CrossRef]
- Yoo, J.; Lee, J.; Sul, S.-K.; Baloch, N.A. Stator Resistance Estimation Using DC Injection with Reduced Torque Ripple in Induction Motor Sensorless Drives. IEEE Trans. Ind. Appl. 2020, 56, 3744–3754. [Google Scholar] [CrossRef]
- Odhano, S.A.; Pescetto, P.; Awan, H.A.A.; Hinkkanen, M.; Pellegrino, G.; Bojoi, R. Parameter Identification and Self-Commissioning in AC Motor Drives: A Technology Status Review. IEEE Trans. Power Electron. 2019, 34, 3603–3614. [Google Scholar] [CrossRef]
- Sangsefidi, Y.; Ziaeinejad, S.; Mehrizi-Sani, A. Sensorless Speed Control of Synchronous Motors: Analysis and Mitigation of Stator Resistance Error. IEEE Trans. Energy Convers. 2015, 31, 540–548. [Google Scholar] [CrossRef]
- Bednarz, S.A.; Dybkowski, M. Estimation of the Induction Motor Stator and Rotor Resistance Using Active and Reactive Power Based Model Reference Adaptive System Estimator. Appl. Sci. 2019, 9, 5145. [Google Scholar] [CrossRef]
- Goel, N.; Patel, R.N.; Chacko, S. A Review of the DTC Controller and Estimation of Stator Resistance in IM Drives. Int. J. Power Electron. Drive Syst. 2015, 6, 554. [Google Scholar] [CrossRef]
- Azab, M.; Orille, A.L. Novel flux and torque control of induction motor drive using four switch three phase inverter. In Proceedings of the IECON’01. 27th Annual Conference of the IEEE Industrial Electronics Society (Cat. No.37243), Denver, CO, USA, 29 November–2 December 2001; Volume 2, pp. 1268–1273. [Google Scholar] [CrossRef]
- El Badsi, B.; Bouzidi, B.; Masmoudi, A. DTC Scheme for a Four-Switch Inverter-Fed Induction Motor Emulating the Six-Switch Inverter Operation. IEEE Trans. Power Electron. 2012, 28, 3528–3538. [Google Scholar] [CrossRef]
- Masmoudi, M.; El Badsi, B.; Masmoudi, A. DTC of B4-Inverter-Fed BLDC Motor Drives with Reduced Torque Ripple During Sector-to-Sector Commutations. IEEE Trans. Power Electron. 2013, 29, 4855–4865. [Google Scholar] [CrossRef]
- Zeng, Z.; Zhu, C.; Jin, X.; Shi, W.; Zhao, R. Hybrid Space Vector Modulation Strategy for Torque Ripple Minimization in Three-Phase Four-Switch Inverter-Fed PMSM Drives. IEEE Trans. Ind. Electron. 2016, 64, 2122–2134. [Google Scholar] [CrossRef]
- Lee, B.-K.; Kim, T.-H.; Ehsani, M. On the feasibility of four-switch three-phase BLDC motor drives for low cost commercial applications: Topology and control. IEEE Trans. Power Electron. 2003, 18, 164–172. [Google Scholar] [CrossRef]
- Savarapu, S.; Qutubuddin; Narri, Y. Modified Brain Emotional Controller-Based Ripple Minimization for SVM-DTC of Sensorless Induction Motor Drive. IEEE Access 2022, 10, 40872–40887. [Google Scholar] [CrossRef]
- El Daoudi, S.; Lazrak, L. Comparison between PI-DTC-SPWM and fuzzy logic for a sensorless asynchronous motor drive. Prot. Control Mod. Power Syst. 2021, 6, 34. [Google Scholar] [CrossRef]
- Peter, A.K.; Mathew, J.; Gopakumar, K. A Simplified DTC-SVPWM Scheme for Induction Motor Drives Using a Single PI Controller. IEEE Trans. Power Electron. 2022, 38, 750–761. [Google Scholar] [CrossRef]
- Li, W.; Xuan, S.; Gao, Q.; Luo, L. Investigation of a Four-Switch Four-Leg Inverter: Modulation, Control, and Application to an IPMSM Drive. IEEE Trans. Power Electron. 2018, 34, 5655–5666. [Google Scholar] [CrossRef]
- Naseri, F.; Farjah, E.; Schaltz, E.; Lu, K.; Tashakor, N. Predictive Control of Low-Cost Three-Phase Four-Switch Inverter-Fed Drives for Brushless DC Motor Applications. IEEE Trans. Circuits Syst. I Regul. Pap. 2020, 68, 1308–1318. [Google Scholar] [CrossRef]
- Sun, D.; Su, J.; Sun, C.; Nian, H. A Simplified MPFC with Capacitor Voltage Offset Suppression for the Four-Switch Three-Phase Inverter-Fed PMSM Drive. IEEE Trans. Ind. Electron. 2018, 66, 7633–7642. [Google Scholar] [CrossRef]
- Hua, W.; Huang, W.; Yu, F. Improved model-predictive-flux-control strategy for three-phase four-switch inverter-fed flux-reversal permanent magnet machine drives. IET Electr. Power Appl. 2017, 11, 717–728. [Google Scholar] [CrossRef]
- Zhou, Y.; Chen, G. Predictive DTC Strategy with Fault-Tolerant Function for Six-Phase and Three-Phase PMSM Series-Connected Drive System. IEEE Trans. Ind. Electron. 2017, 65, 9101–9112. [Google Scholar] [CrossRef]
- Berzoy, A.; Rengifo, J.; Mohammed, O. Fuzzy Predictive DTC of Induction Machines with Reduced Torque Ripple and High-Performance Operation. IEEE Trans. Power Electron. 2017, 33, 2580–2587. [Google Scholar] [CrossRef]
- Xu, A.; Shang, C.; Chen, J.; Zhu, J.; Han, L. A New Control Method Based on DTC and MPC to Reduce Torque Ripple in SRM. IEEE Access 2019, 7, 68584–68593. [Google Scholar] [CrossRef]
- Chebaani, M.; Ebeed, M.; Abdellatif, W.S.E.; Elbarbary, Z.M.S.; Nouraldin, N.A. Design and Implementation of an Improved Finite-State Predictive Direct Torque Control for Induction Motor with New Weighting Factor Elimination. IEEE Access 2023, 11, 58169–58187. [Google Scholar] [CrossRef]
- Yang, A.; Lu, Z. Multiscalar Model-Based Predictive Torque Control without Weighting Factors and Current Sensors for Induction Motor Drives. IEEE J. Emerg. Sel. Top. Power Electron. 2022, 10, 5785–5797. [Google Scholar] [CrossRef]
- Xu, W.; Ali, M.M.; Elmorshedy, M.F.; Allam, S.M.; Mu, C. One Improved Sliding Mode DTC for Linear Induction Machines Based on Linear Metro. IEEE Trans. Power Electron. 2020, 36, 4560–4571. [Google Scholar] [CrossRef]
- Lascu, C.; Argeseanu, A.; Blaabjerg, F. Supertwisting Sliding-Mode Direct Torque and Flux Control of Induction Machine Drives. IEEE Trans. Power Electron. 2020, 35, 5057–5065. [Google Scholar] [CrossRef]
- Petkar, S.G.; Thippiripati, V.K. A Novel Duty-Controlled DTC of a Surface PMSM Drive with Reduced Torque and Flux Ripples. IEEE Trans. Ind. Electron. 2022, 70, 3373–3383. [Google Scholar] [CrossRef]
- Alsofyani, I.M.; Kim, K.Y.; Lee, S.S.; Lee, K.-B. A Modified Flux Regulation Method to Minimize Switching Frequency and Improve DTC-Hysteresis-Based Induction Machines in Low-Speed Regions. IEEE J. Emerg. Sel. Top. Power Electron. 2019, 7, 2346–2355. [Google Scholar] [CrossRef]
- Bajjuri, N.K.; Jain, A.K. An Improved Dual DTC of Double-Inverter-Fed WRIM Drive with Reduced Torque Ripple by Emulating Equivalent 3L NPC VSC. IEEE Trans. Ind. Electron. 2021, 69, 5453–5464. [Google Scholar] [CrossRef]
- Zhang, X.; Foo, G.H.B. Overmodulation of Constant-Switching-Frequency-Based DTC for Reluctance Synchronous Motors Incorporating Field-Weakening Operation. IEEE Trans. Ind. Electron. 2018, 66, 37–47. [Google Scholar] [CrossRef]
- Yan, N.; Cao, X.; Deng, Z. Direct Torque Control for Switched Reluctance Motor to Obtain High Torque–Ampere Ratio. IEEE Trans. Ind. Electron. 2018, 66, 5144–5152. [Google Scholar] [CrossRef]
- Lv, K.; Xie, Z.; Zhou, M.; Bu, J. A Comparative Study of Three Starting Strategies for an Aero Flywheel Motor Using the Modified DTC Method. IEEE Access 2019, 7, 59548–59558. [Google Scholar] [CrossRef]
- Zhang, Q.; Deng, J.; Fu, N. Minimum Copper Loss Direct Torque Control of Brushless DC Motor Drive in Electric and Hybrid Electric Vehicles. IEEE Access 2019, 7, 113264–113271. [Google Scholar] [CrossRef]
- Saleh, S.A.; Rubaai, A. Extending the Frame-Angle-Based Direct Torque Control of PMSM Drives to Low-Speed Operation. IEEE Trans. Ind. Appl. 2018, 55, 3138–3150. [Google Scholar] [CrossRef]
- Naganathan, P.; Srinivas, S. MTPA Associated DTC Methodologies for Enhanced Performance and Energy Savings in Electric Vehicle Mobility with Induction Motor Drive. IEEE Trans. Transp. Electrif. 2021, 8, 1853–1862. [Google Scholar] [CrossRef]
- Deng, W. Maximum Voltage Transfer Ratio of Matrix Converter Under DTC With Rotating Vectors. IEEE Trans. Power Electron. 2020, 36, 6137–6141. [Google Scholar] [CrossRef]
- Deng, W.; Li, H.; Rong, J. A Novel Direct Torque Control of Matrix Converter-Fed PMSM Drives Using Dynamic Sector Boundary for Common-Mode Voltage Minimization. IEEE Trans. Ind. Electron. 2020, 68, 70–80. [Google Scholar] [CrossRef]
- Mahmud, M.H.; Wu, Y.; Alhosaini, W.; Diao, F.; Zhao, Y. Enhanced Direct Torque Control for a Three-Level T-Type Inverter. IEEE Trans. Transp. Electrif. 2021, 7, 1638–1651. [Google Scholar] [CrossRef]
- Wang, Y. Deadbeat Direct Torque and Flux Control Drives for High Power Applications Using Low Switching Frequency Multi-Level Inverters; University of Wisconsin-Madison: Madison, WI, USA, 2016. [Google Scholar]
- IEC-1000-3-2. Available online: https://www.document-center.com/standards/show/IEC-1000-3-2/history/REPLACED%20BY%20IEC-61000-3-2 (accessed on 14 April 2024).
- IEC/TS 61000-3-4. Available online: https://standards.globalspec.com/std/651261/iec-ts-61000-3-4. (accessed on 14 April 2024).
- IEC 61800-3:2004. Available online: https://www.iecee.org/certification/iec-standards/iec-61800-32004 (accessed on 14 April 2024).









| Advantages | Disadvantages | |
|---|---|---|
| SC Drives |
|
|
| VC Drives |
|
|
| DTC drives |
|
|
| Switching State S1 S3 S5 | Vector Notation Vx | Space Vector | (α–β) Components Vα and Vβ | ||
|---|---|---|---|---|---|
| Mag. | Angle | Vα | Vβ | ||
| 0 0 0 | V0 | 0 | N/A | 0 | 0 |
| 1 0 0 | V1 | 0 | 0 | ||
| 1 1 0 | V2 | ||||
| 0 1 0 | V3 | ||||
| 0 1 1 | V4 | π | 0 | ||
| 0 0 1 | V5 | ||||
| 1 0 1 | V6 | ||||
| 1 1 1 | V7 | 0 | N/A | 0 | 0 |
| ΔΦ | ΔTe | Sector 1 0–90 | Sector 2 90–180 | Sector 3 180–270 | Sector 4 270–360 |
|---|---|---|---|---|---|
| 1 | 1 | 1 0 | 1 1 | 0 1 | 0 0 |
| 1 | −1 | 0 0 | 1 0 | 1 1 | 0 1 |
| 0 | 1 | 1 1 | 0 1 | 0 0 | 1 0 |
| 0 | −1 | 0 1 | 0 0 | 1 0 | 1 1 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Azab, M. Low-Cost DTC Drive Using Four-Switch Inverter for Low Power Ranges. Vehicles 2024, 6, 895-919. https://doi.org/10.3390/vehicles6020043
Azab M. Low-Cost DTC Drive Using Four-Switch Inverter for Low Power Ranges. Vehicles. 2024; 6(2):895-919. https://doi.org/10.3390/vehicles6020043
Chicago/Turabian StyleAzab, Mohamed. 2024. "Low-Cost DTC Drive Using Four-Switch Inverter for Low Power Ranges" Vehicles 6, no. 2: 895-919. https://doi.org/10.3390/vehicles6020043
APA StyleAzab, M. (2024). Low-Cost DTC Drive Using Four-Switch Inverter for Low Power Ranges. Vehicles, 6(2), 895-919. https://doi.org/10.3390/vehicles6020043