1. Introduction
A periodic cellular solid, also known as a LM, is a periodic micro-architectured structure designed by tessellating a unit cell in an infinite periodicity. The unit cell is considered as the material’s Representative Volume Element (RVE), sufficient to predict its macroscopic characteristics [
1,
2,
3]. To be considered a periodic structure, the unit cell must present a degree of symmetry, which is given by the Bravais lattice symmetry [
4]. This category of structure is known for its unusual mechanical properties not found in natural bulk solids, which makes them suitable for applications in a plethora of engineering areas, such as mechanical [
5,
6,
7], aerospace [
8,
9,
10] or biomedical [
11,
12,
13]. Some relevant characteristics explored in recent works are related to auxetic behavior [
14,
15,
16], elevated mechanical strength and stiffness [
17,
18,
19], exceptional elastodynamic behavior [
20,
21,
22,
23,
24].
LMs are classified into two categories, bending and stretching dominated [
25,
26,
27], when considering the small deformations hypothesis. A stretching dominated lattice structure, does not present internal mechanisms, when performing a determinacy analysis, therefore its elements are mainly loaded in tension or compression [
28]. Modeling a stretching dominated structure as pin-jointed is sufficient to predict its homogenized macroscopic mechanical characteristics [
29]. Even when its joints are considered as rigid, the arising bending moments are often neglected. By relaxing the constraint of small deformations, some special cases arise. For instance, a Triangular-Triangular lattice topology which is classified as stretching-dominated, will be bending-dominated under the load of pure dilation as this lattice tends to transform to the configuration of Kagome lattice [
30]. Bending dominated structures, on the other hand, contain internal active mechanisms that are not developed by states of self-stress [
31], hence being suppressed due to nodal rotational stiffness within the lattice connectivity.
Several numeric and analytic methods have been proposed to effectively model properties of RJLM [
32] in which the response of a single unit cell or a finite number of them are investigated. Other analytical methods modelled the LM as a continuum. Those models provide inaccurate results when the in-plane bending of the cell elements of a RJLM is taken into consideration [
33]. To overcome this issue, a micro-polar continuum model has been used for the characterization of LMs [
34,
35]. More recently, the use of the
Bloch’s theorem [
36], commonly applied in solid state Physics, has been proposed to model the propagation of the static and the kinematic wave-functions in an infinite lattice structure [
37,
38,
39,
40]. An interesting research by Niu and Wang [
41] presented the concurrent determination of specific elastic properties of RJLM periodic Kagome honeycomb lattice with its wave propagation directionality, where it was possible to characterize an optimum configuration of the structure in order to achieve maximization of its stiffness and strength.
A novel matrix-based methodology is proposed in this paper to model the effective stiffness properties of a RJLM. The classical matrix methods of structural analysis [
38,
42] are used to derive the stiffness of the finite structure of the lattice unit cell. The
Bloch’s theorem is employed to reduce the stiffness system to the irreducible representation of the infinite lattice structure. The
Cauchy-Born Hypothesis [
43,
44,
45,
46], in turn, is used to determine the micro-nodal forces and deformations defined by a homogeneous macro-strain field applied to the lattice. Through the principle of virtual work [
47] and
Hill-Mandel [
45] of macro-homogenization, we derive the macro-stiffness properties of a RJLM. The method is employed to formulate closed-form expressions of in plane stiffness of 13 2D lattice topologies. In addition, the
Bond-stress and strain orthogonal transformations [
48,
49] are used to study the anisotropic behavior of the homogenized macroscopic stiffness of LMs with selected cell topologies. Moreover, we experimentally validated the numerical method implemented with tensile and shear test in a specimen designed following the criteria presented in the paper, achieving low error in the prediction of the elastic moduli and strength of the lattice materials. The framework created allows the designer to effectively estimate the mechanical properties of any desired 2D periodic lattice unit-cell topology. Finally, we also presented design charts for the 13 lattice topologies investigated, which allows one to effectively estimate the elastic properties of the lattice unit-cells for a given relative density, which can be calculated from the geometrical parameters of the unit-cell designed. The design charts are also generated as polar coordinate maps, where it is possible to capture the effect of anisotropic behavior of the lattice topologies, therefore indicating the best orientation a LM can be loaded to resist a macroscopic loading applied in a given direction.
The paper is divided in six sections. Succeeding this introduction, the modeling procedure to characterize the stiffness properties of RJLMs is presented. In the third section, the modeling procedure is used to determine the stiffness properties of 13 different topologies of 2D LMs. Accuracy of the theoretical modeling procedure is verified experimentally in
Section 4. In the fifth section, the anisotropic response of the lattices is investigated and charts that show the change of the elastic moduli with respect to macroscopic loading direction are presented. In section six, the results are discussed along with the paper conclusions.
2. Methodology
A LM is constructed by infinitely tessellating a unit cell. A similar construction is commonly applied in solid state physics to describe the arrangement of atomic crystals in a solid [
4]. An atomic crystal is assumed as a mathematical superposition of two identities, namely, the lattice and the bases. The lattice is defined as an infinitely periodic positioning of nodes in space [
50,
51], where bases are the mathematical description of the pattern in every cell translation.
Likewise, the above description can be adopted in continuum mechanics to model a LM. The unit cell is the minimum division of the lattice and is defined as the superposition of two identities, namely, the cell envelope and the bases. The former describing the periodic structure is expressed with the primitive bases, , of the lattice translational symmetry, where and n = 2 or n = 3 in 2D or 3D, respectively. The latter represents the physical network defined by two groups, the nodal and the bar bases group.
Figure 1 depicts the described concept, with respect to the 2D triangular lattice.
Figure 1a shows the microstructure of the LM. The envelope of a possible unit cell is shown with the bold lines in
Figure 1a,b. The latter also illustrates the primitive bases
and
.
Figure 1c, on the other hand, depicts the bar arrangement vectors,
, and node arrangement vectors,
, of the physical structure of the unit cell, where
and
.
b and
j are, respectively, the number of bars and nodes within the unit cell.
2.1. Constitutive Stiffness of the RJLM Unit Cell
The stiffness systems of a structure that contains
b elements linked by
j nodes can be written as the following:
where
is the constitutive stiffness matrix of the structure that associates its nodal deformation vector,
, to the applied force vector,
[
42]. On the other hand, the stiffness system of a frame element, k, can be expressed as:
where
and
are the local element axial and bending constitutive stiffness matrices, respectively, as
is the frame element total stiffness matrix.
E,
A,
I and
are, respectively, the Young’s modulus of the solid material, the cross-sectional area, the second moment of area and the length of the bar element.
and
are, respectively, the nodal force and the nodal displacement vectors of element
k in the element local coordinate system (
). It should be noted that
E,
A, and
I are assumed as common for all elements of the unit cell while the element length is varied.
A formulation similar to Equations (2) and (3) can be obtained for each element in the unit cell, and the assembled global stiffness system of the unit cell finite structure is given as:
2.2. Stiffness System of a RJLM
The Bloch’s theorem [
36] is employed to generate the irreducible form of the stiffness system of the unit cell. This constitutes the stiffness of the unbounded lattice. Similar to the approach found in [
27,
37], the Bloch’s theorem is used here to describe the propagation of the wave-function over a LM.
2.2.1. Bloch’s Theorem
A wave-function,
, propagating over an infinite lattice can be written as:
where
and
are, respectively, the position vectors of node
l and bar
m of the LM and
is the direct translational vector of any unit cell of the LM.
,
and
being the covariant components of
, are found from the irreducible Brillouin zone of the reciprocal lattice space.
J and
B are, respectively, the independent nodes and bars within the unit cell envelope.
is the complex number and
C is the set of all complex numbers. The following section presents the transformation matrices that is applied to reduce the wave-functions and constitutive matrices. The procedure imposes periodic boundary conditions to the unit cell [
52,
53].
2.2.2. Transformation Matrices
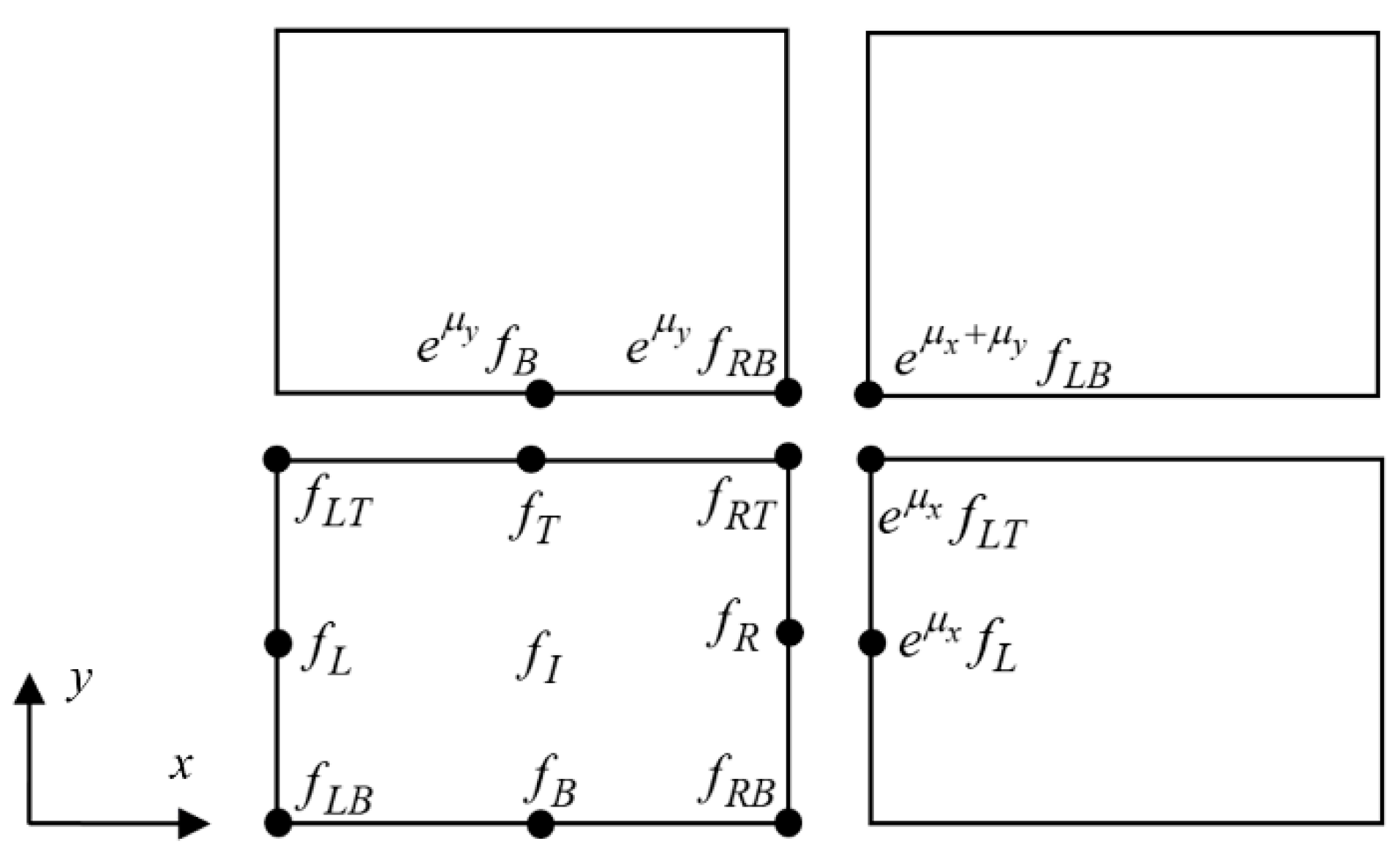
The kinematic transformation matrix is obtained as the following. Consider the generic unit cell depicted in
Figure 2; when applying the
Bloch’s theorem the relations below can be written:
where
q is the deformation function of a generic node;
T,
B,
L and
R denote top, bottom, left and right, respectively;
and
are expressed as:
Equation (7) can be written in matrix terms as:
where
T is the transformation matrix to the reduced degrees of freedom of the infinite LM structure, and
is an identity matrix of same size as the unit cell nodal degrees of freedom. The reduced wave-functions of the nodal displacements, by application of the transformation matrix, is given as:
where
is the reduced nodal displacement vector. The same concept, used for the kinematic transformation matrix, can be applied to generate the equilibrium transformation matrix. For the cluster of four generic unit cells shown in
Figure 3, the application of the
Bloch’s theorem allows writing the equations below:
Equation (12) can be arranged as:
where
and
is the Hermitian (the conjugate transpose) of the transformation matrix
T.
Equations (11) and (13) are substituted in the constitutive global stiffness system of the unit cell to derive its periodic reduced form as:
where
is the reduced stiffness matrix of the LM, expressed as:
2.3. Effective Macro-Stiffness of a RJLM
The stiffness properties of the microstructure of the LM are homogenized to establish its macro-stiffness properties. This procedure can be performed by means of the employment of the
Cauchy-Born hypothesis [
43,
44,
45,
46], as described below.
2.3.1. Cauchy-Born Hypothesis
The definition of the
Cauchy-Born hypothesis [
43] states that the infinitesimal displacement field of a periodic node in a LM structure is given by:
where
is the
l nodal displacement vector. Assuming that the nodes described by the position vectors
and
, are the two rigid nodes
i and
j within a LM structure, then Equation (16) can be written as:
where
and
are, respectively, the vectorial displacement components of the node in the
x and
y directions and node
i is the dependent node, while node
j is the independent node. The parameter
represents the rotation of the node in the
xy-plane. By using the concept of engineering strain [
54], Equation (17) is modified to:
which is given by:
Applying this boundary condition to the nodal displacement vector,
d, of the unit cell returns:
Equation (20) is the rigid-jointed modified kinematic boundary condition of the
Cauchy-Born Hypothesis. Substituting Equation (17) into the constitutive stiffness system of the unit cell (Equation (4)) yields:
Pre-multiplying Equation (21) by the Hermitian of the transformation matrix,
, and substituting Equation (13) into the outcome, results in:
Rearranging Equation (22), results in:
Equation (23) is divided into two matrix systems that are given by:
where
and
are respectively the axial (bar) and bending (beam) stiffness matrices.
2.3.2. Microscopic Nodal Deformations in Terms of Macro-Strain Field
The microscopic nodal deformation should be computed in terms of macro-strain field using Equations (24) and (25). This can be done by multiplying both sides of Equations (24) and (25) with the inverted stiffness matrices. To invert the stiffness matrices, all non-pivotal modes in their column and row spaces have to be eliminated. The non-pivotal modes are related to the rigid-body motion, since the LM is not constrained, and the modes associated with microscopic internal mechanisms within the lattice. The non-pivotal modes can be determined by computing the reduced row echelon form [
55] of the two matrices
and
. The resulting non-singular stiffness matrices can be inverted and an expression of the microscopic nodal displacements, related to the given macroscopic strain field, can be expressed as:
where
and
are, respectively, the microscopic nodal deformations corresponding to the axial and the bending behavior of the LM.
and
are, respectively, the bar and the beam non-singular, reduced, stiffness matrices generated after eliminating modes associated with the rigid-body modes and the internal network mechanisms.
The deformation of the unit cell nodes is found by substituting Equations (26) and (27) into Equation (20), which results in:
The equations of the generalized microscopic nodal forces, with respect to the macroscopic strain field, can be computed by direct substitution of Equations (28) and (29) into Equation (4) as:
2.3.3. Homogenized Macro-Stiffness of LMs
The generalized nodal forces and deformations, formulated in the previous section, are used to derive the macro-stiffness properties of the RJLMs by applying the principle of virtual work [
47] and the
Hill-Mandel macro-homogeneity principle [
45], as:
where
is the planar area of the unit cell.
and
are, respectively, the homogenized, fourth order, axial and bending stiffness tensors of the LM.
and
are respectively the compatibility matrices of macroscopic strain field and microscopic force vector that is applied to the unit-cell nodes, considering the axial and bending stiffness contribution. Similarly,
and
are respectively the compatibility matrices between the macroscopic strain field and the microscopic nodal displacements in the lattice unit-cell structure, considering the axial and bending components of the stiffness matrix. The relative density,
, of a 2D LM is given by:
where
is a constant parameter that depends on the geometry of the unit cell and
H is the in-plane thickness of the microscopic element of the 2D lattice;
,
and
are respectively, the relative density of the LM, the LM density and the density of the solid material. If we consider an out-of-plane depth of the 2D lattice equal to a unit length,
L = 1, and substitute Equation (34) into Equations (32) and (33) we obtain:
With the macroscopic stiffness matrix determined, the macro-compliance matrix can be found by calculating the inverse of the stiffness matrix, where
CL =
KL−1 is the linearly elastic fourth order compliance tensor of the LM, that can be further used to calculate the LM elastic moduli, which is described by:
It is possible, then, to write a relation between the macroscopic strain field,
, and the stress field,
, as in the elastic stress Hooke’s law equation:
The elastic moduli and Poisson coefficient can finally be determined by:
where
,
,
are the homogenized Young moduli and shear modulus, respectively, for each principal direction in the cartesian plane.
and
are the directional Poisson coefficients of the lattice material.
2.4. Strength Properties of a RJLM
From the previously determined equations, it is possible to extend them to estimate the RJLM strength. To do so, it is necessary to define the microscopic cell deformation vector,
, with respect to the macroscopic strain field,
. This is possible by means of the application of the compatibility matrix previously introduced,
and
. They are related as in the following equation:
where
and
are the cell element deformations, and
is defined as the global compatibility matrix. An in-depth explanation about the calculation of the compatibility matrix can be found in the work of ElSayed and Pasini [
27]. The element strain can be computed my pre-multiplying Equation (49) by the reciprocal element length matrix,
, establishing the relationship between the microscopic cell element strain,
, and the macroscopic strain field, as in the following relation:
The macroscopic strain is translated into microscopic strain with significant portion being imparted by microscopic bending stiffness in bending dominated lattices and mainly imparted by tensional stiffness in stretching dominated lattices. Using Equation (38) in Equation (42) and multiplying by the material Young modulus,
E, one obtains:
where
is the microscopic cell element stress, and
is a matrix dependent on the unit cell topology analyzed and on the microscopic cell element deformations. Equation (43) is used to evaluate the strength properties of the lattice topologies by means of the application of three macroscopic stress fields,
, considering a single direction in each case. The least resistant element in the lattice unit cell, when subjected to the stress field, will represent the critical macroscopic strength of the lattice material. The relation is given by the following equation:
where
is a coupling coefficient between the macroscopic and microscopic strength of the lattice material, for the
x-, y- and
xy- directions. This criterion to assess the macroscopic strength of the lattice material conservatively considers that the entire lattice fails when one microscopic element of a unit cell fails. The parameter
refers to the solid material property of comparison for failure analysis. In this paper, the solid material plastic yield strength is considered to evaluate the tensile strength of the lattice. Therefore, the critical microscopic element stress is set equal to the material yield strength, i.e.,
. For an isotropic and ductile material, the plastic shear strength can be easily determined by the relation
, which is obtained from the Mohr’s circle in pure shear loading, and thus is used to estimate the critical shear strength of the lattice material.
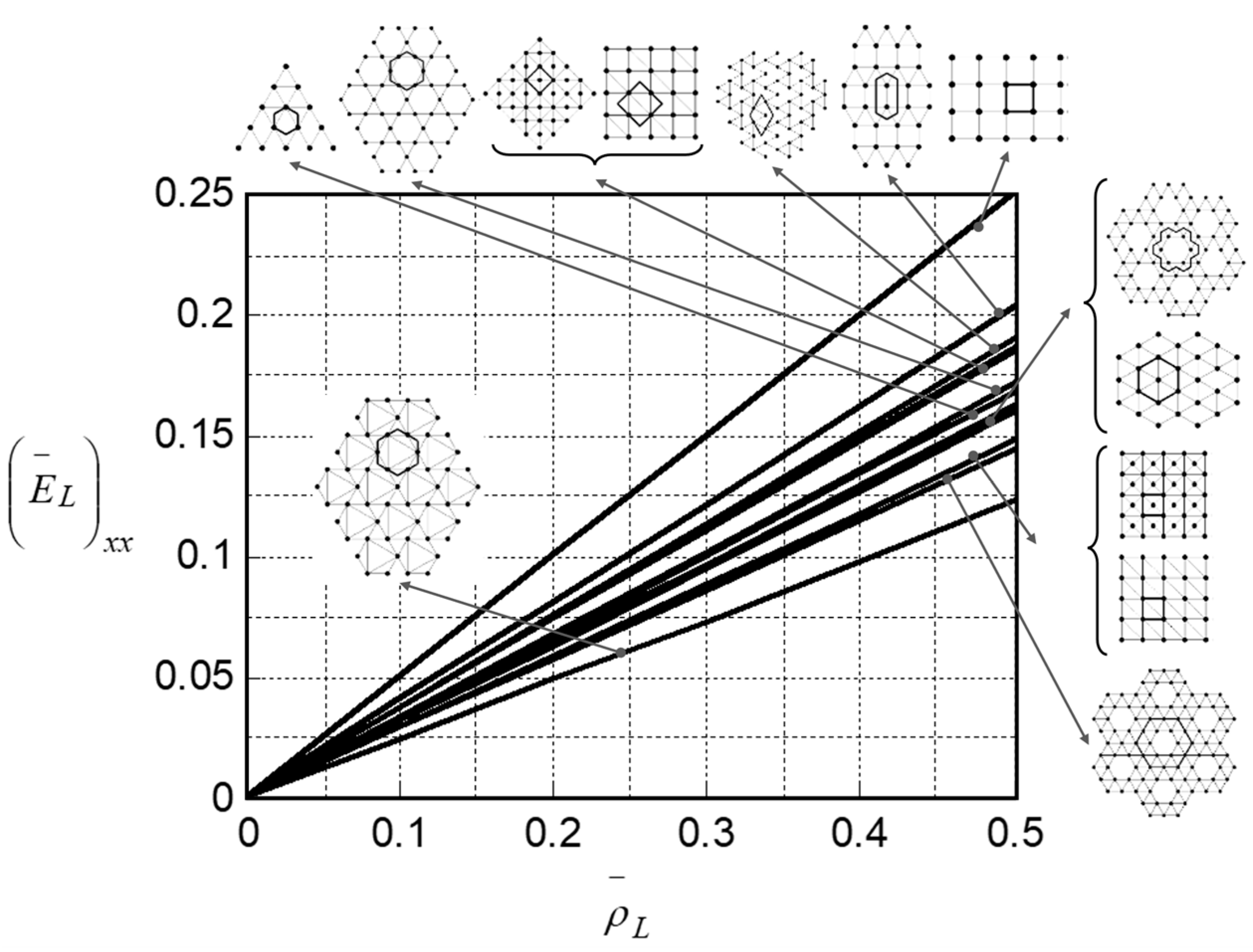
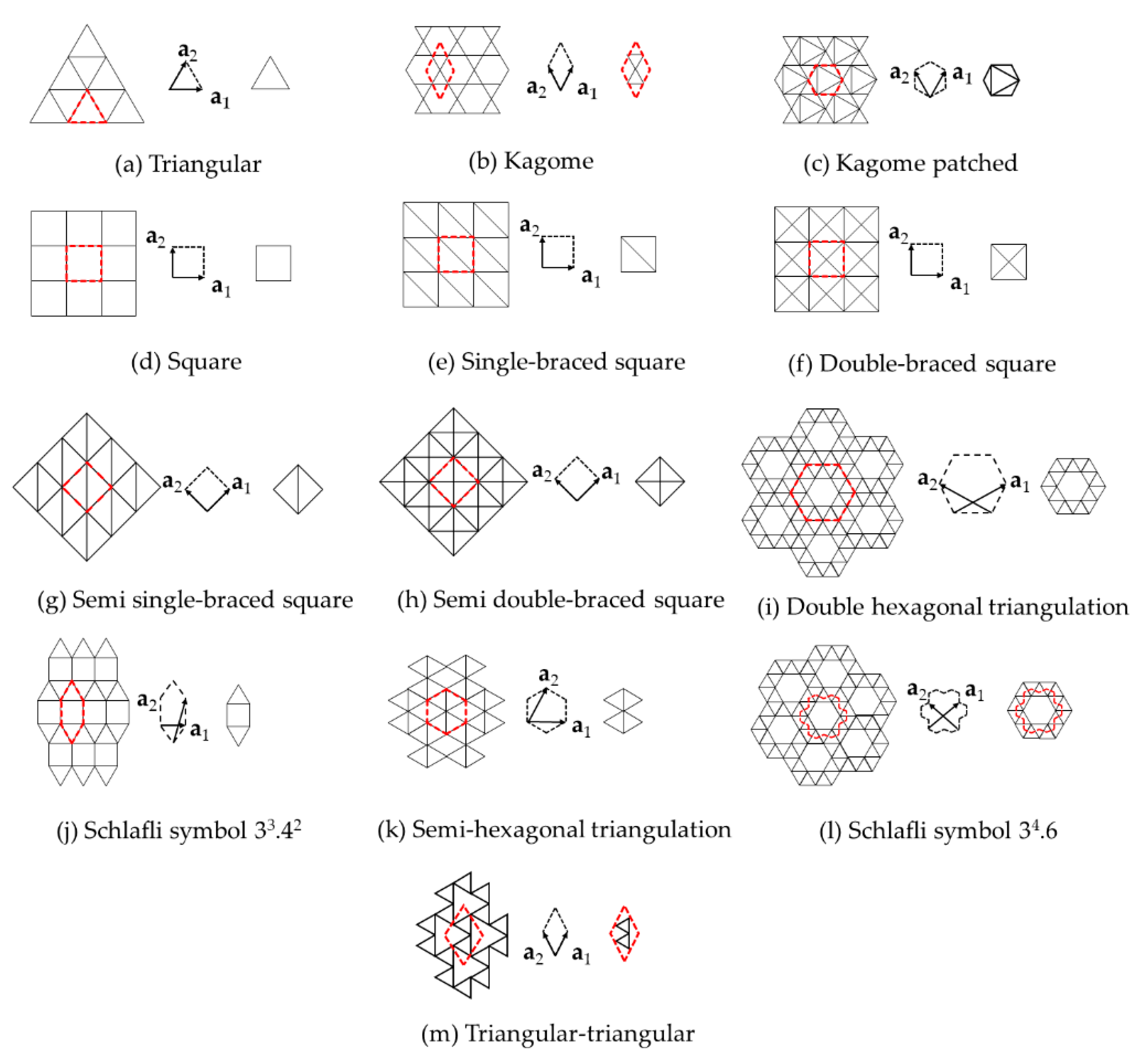
3. Stiffness Property Charts
The methodology described in
Section 2 is applied here to compute the relative stiffness of 13 RJLM topologies. The lattice topologies and their respective unit cells with the direct lattice bases are depicted in the
Appendix A of the paper. Details regarding the lattice unit-cell topologies are discussed in the
Supplementary Material of the paper. The results obtained are reported in
Figure 4,
Figure 5 and
Figure 6. The relative density was limited to the range
in order to limit the microscopic lattice element maximum aspect ratio, due to the assumption of
Euler-Bernoulli beams as the constitutive model for the formulation derived in the previous section [
56].
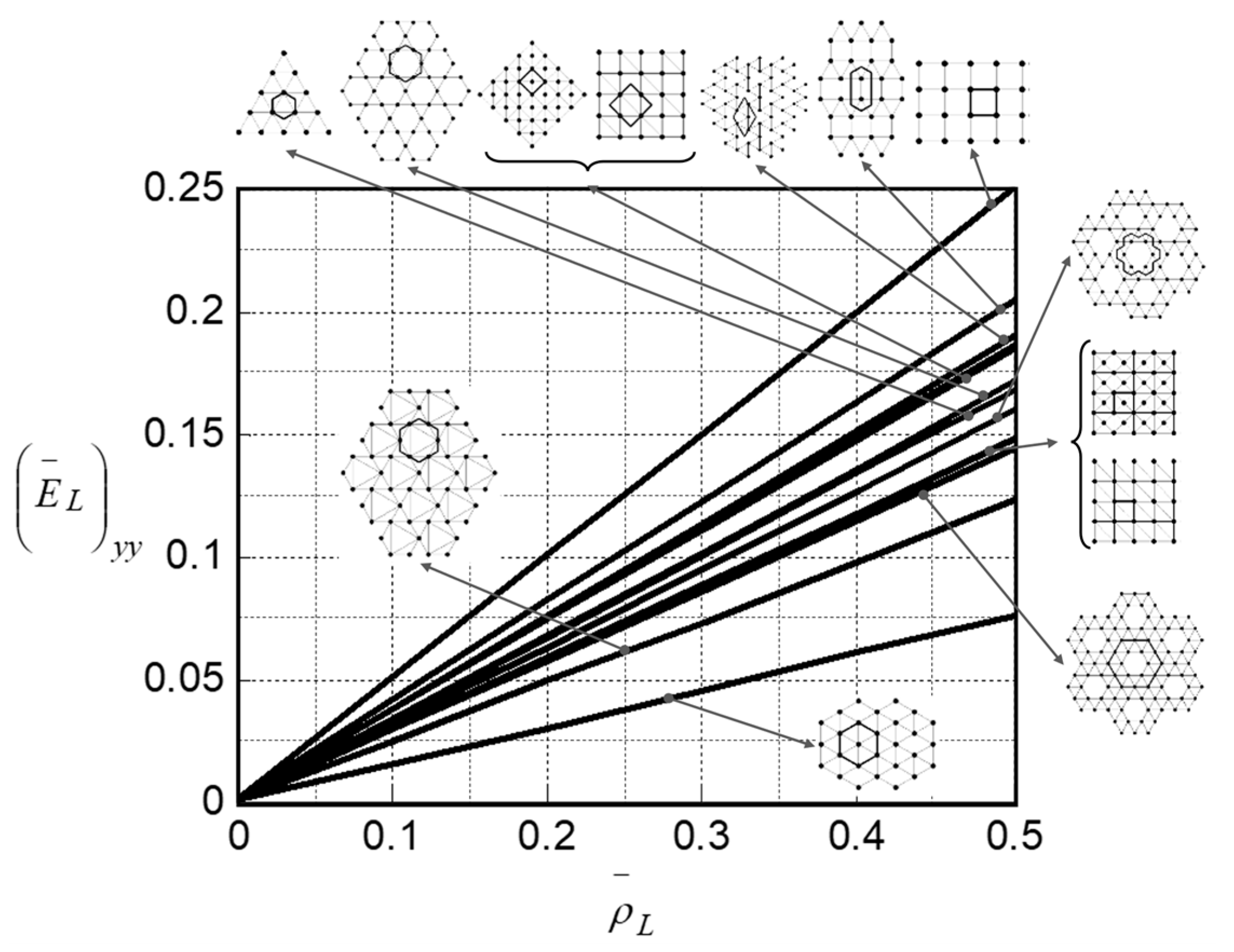
Figure 4,
Figure 5 and
Figure 6, the relative Young and Shear modulus of the LM with respect to a variation of relative density, the relative elastic modulus being the ratio of the LM to the solid material elastic modulus. The results are plotted for the full range of relative density; however, it should be noted that practical ranges of porosity have a reduced range of relative density depending on the porous media [
57]. These charts assist in the selection of the best topology of a LM for a given design requirement. The results provide a thorough comparison of elastic properties between different LM topologies, demonstrating the proportional effect of filling the periodic voids of a LM with respect to the mechanical properties.
From
Figure 4 and
Figure 5 it is possible to conclude that the axial stiffness dominates the macro-stiffness behavior of the LM. This is illustrated by the nearly-straight lines representing the variation of the relative elastic moduli versus the relative density of the LM. However, the contribution of the bending stiffness of the microscopic cell elements to the macroscopic shear stiffness of the LM is significant in LMs that have a bending dominated behavior, such as the square and the 3
3.4
2 lattice topologies [
27]. This is shown by the non-linear curves (
Figure 6), representing the variation of the elastic shear moduli of the LMs versus its relative density.
From
Figure 4 and
Figure 5 it can be concluded that the square lattice topology presents the most significant values of relative stiffness in both directions analyzed. This is expected due to the fact that this lattice presents the orientation of the micro-elements of the unit cell aligned with the macro-load applied. This characteristic allows the square lattice topology to be the best selection in applications where the macro-loads applied come from a single principal direction. On the other hand, the disadvantage lies in the fact that it presents a low Shear stiffness, as it can be seen in
Figure 6. This makes it compliant to deform through this mechanism, when compared to other topologies, in the case of a combination of macro-loads applied in multiple directions.
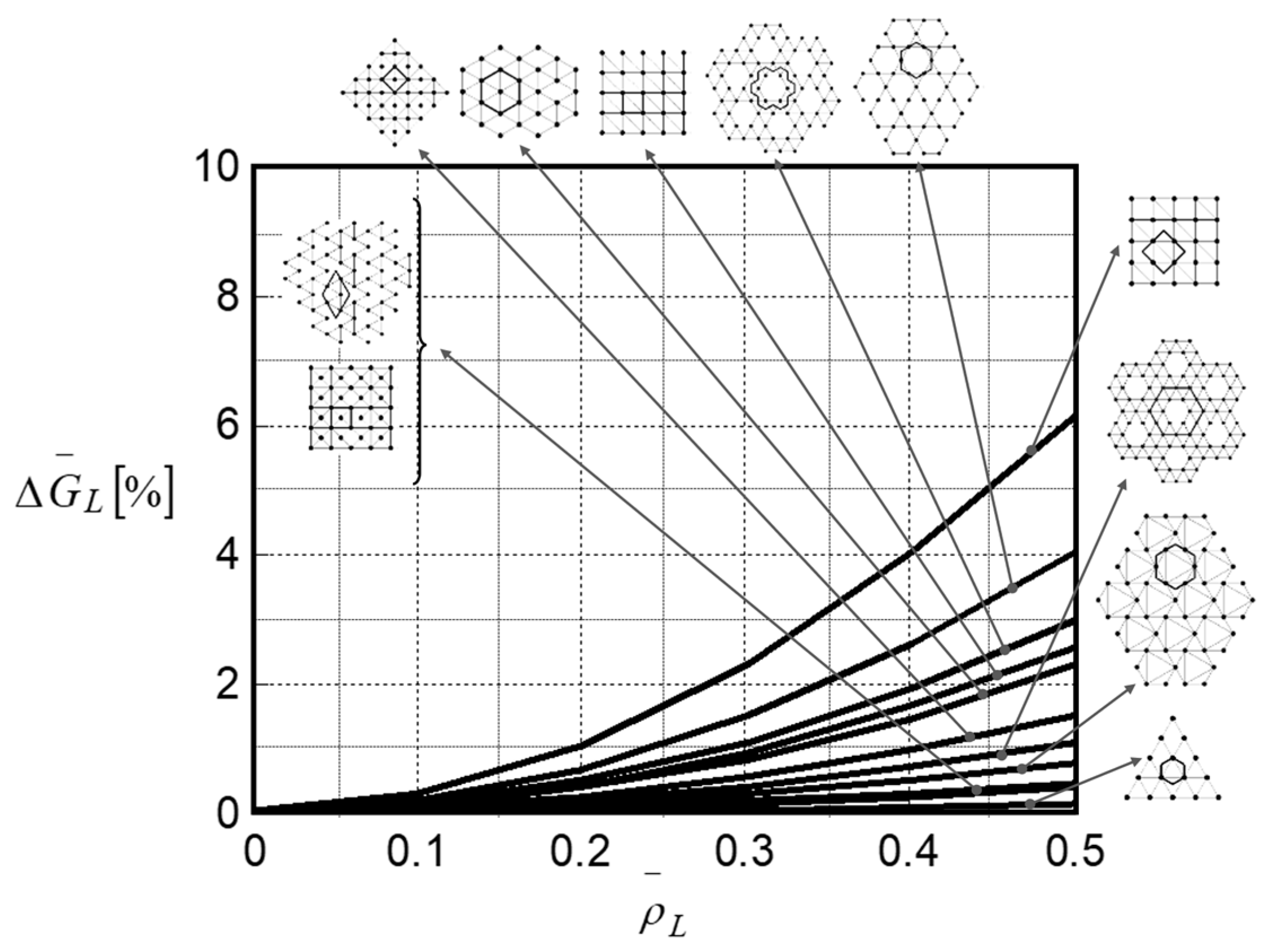
The bending stiffness behavior contribution of the unit cell elements to the macro-stiffness of stretching dominated LMs can be assessed by the relations given below:
Equations (45)–(47) are plotted in
Figure 7,
Figure 8 and
Figure 9 for all lattice topologies considered. The curves show that the closer the topology to the full triangulated lattice, the less the participation of the micro-bending stiffness to the homogenized macro-stiffness of the LM. It is found that, at relative density 0.3, the microscopic bending contribution is almost 1% in the direct stiffness of the Kagome lattice and 2.2% in the shear stiffness of the Semi-Uni-Braced square lattice. These values can theoretically increase respectively to 8% and 17% for higher relative density, e.g., 0.9. However, for higher density the lattice cells overlap and merge together; thus, the results lose physical significance.
Since LMs are generally manufactured as RJLM,
Figure 7,
Figure 8 and
Figure 9 give an estimate of the expected error involved in the elastic properties of stretching dominated topologies that are modelled as pin-jointed lattice structures. Such analysis is useful to compare the theoretical results of pin-jointed lattices with their experimental counter parts [
27]. In summary, for LMs with high relative density, the bending stiffness term in the total homogenized macroscopic stiffness increases its significance. Therefore, it becomes necessary to consider the rigid-joint modelling if one intends to achieve accurate expected results of the mechanical properties.
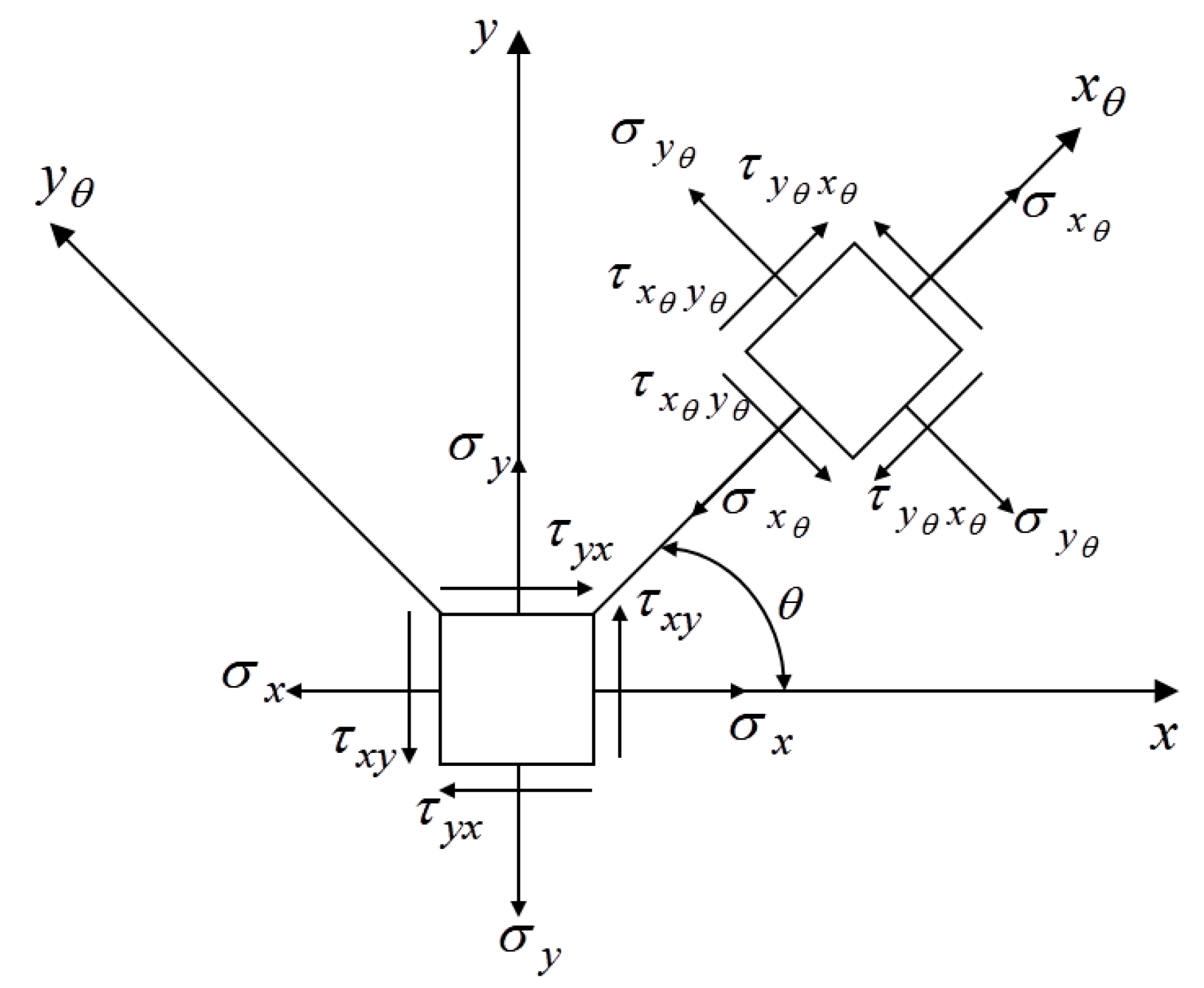
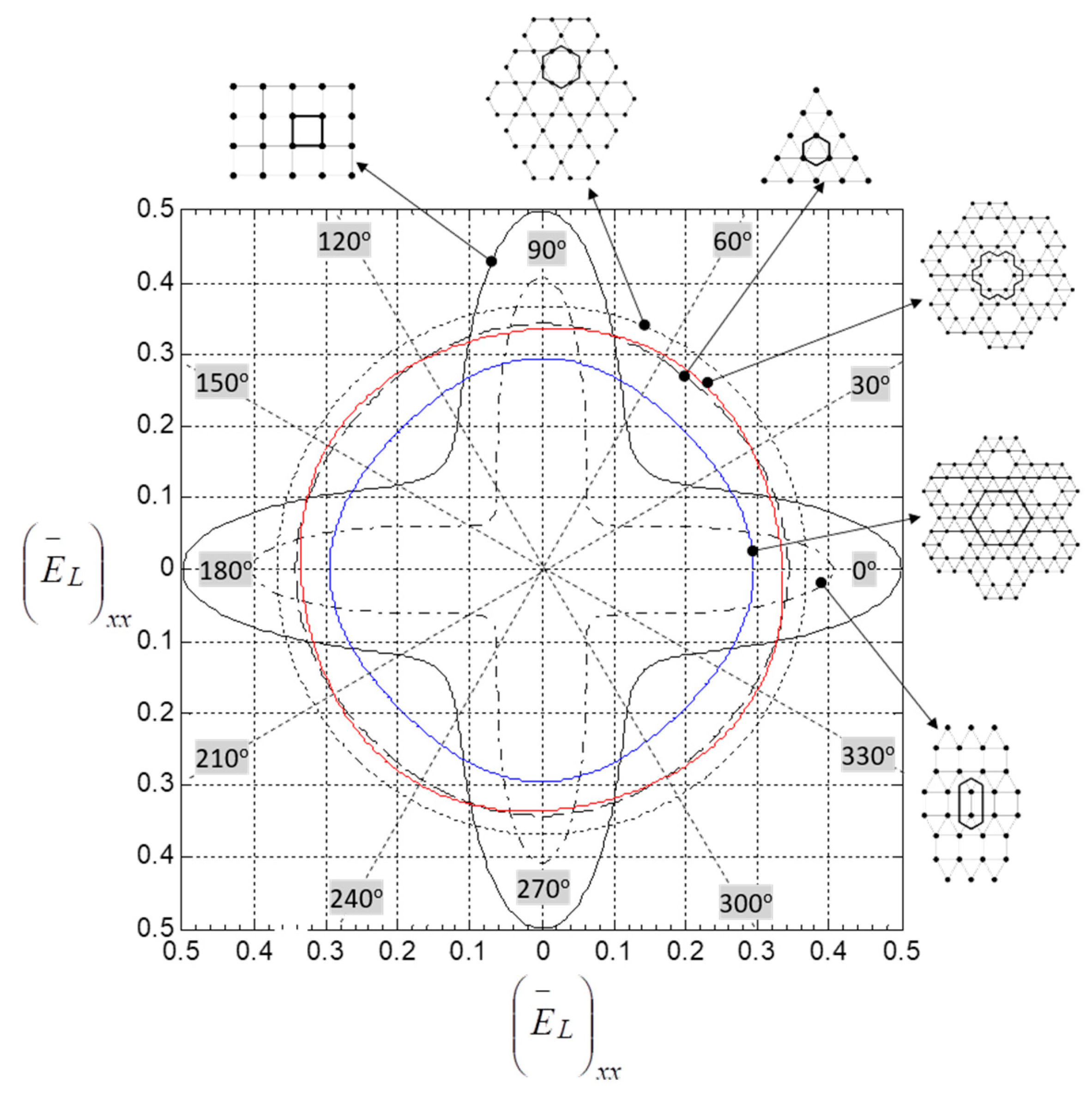
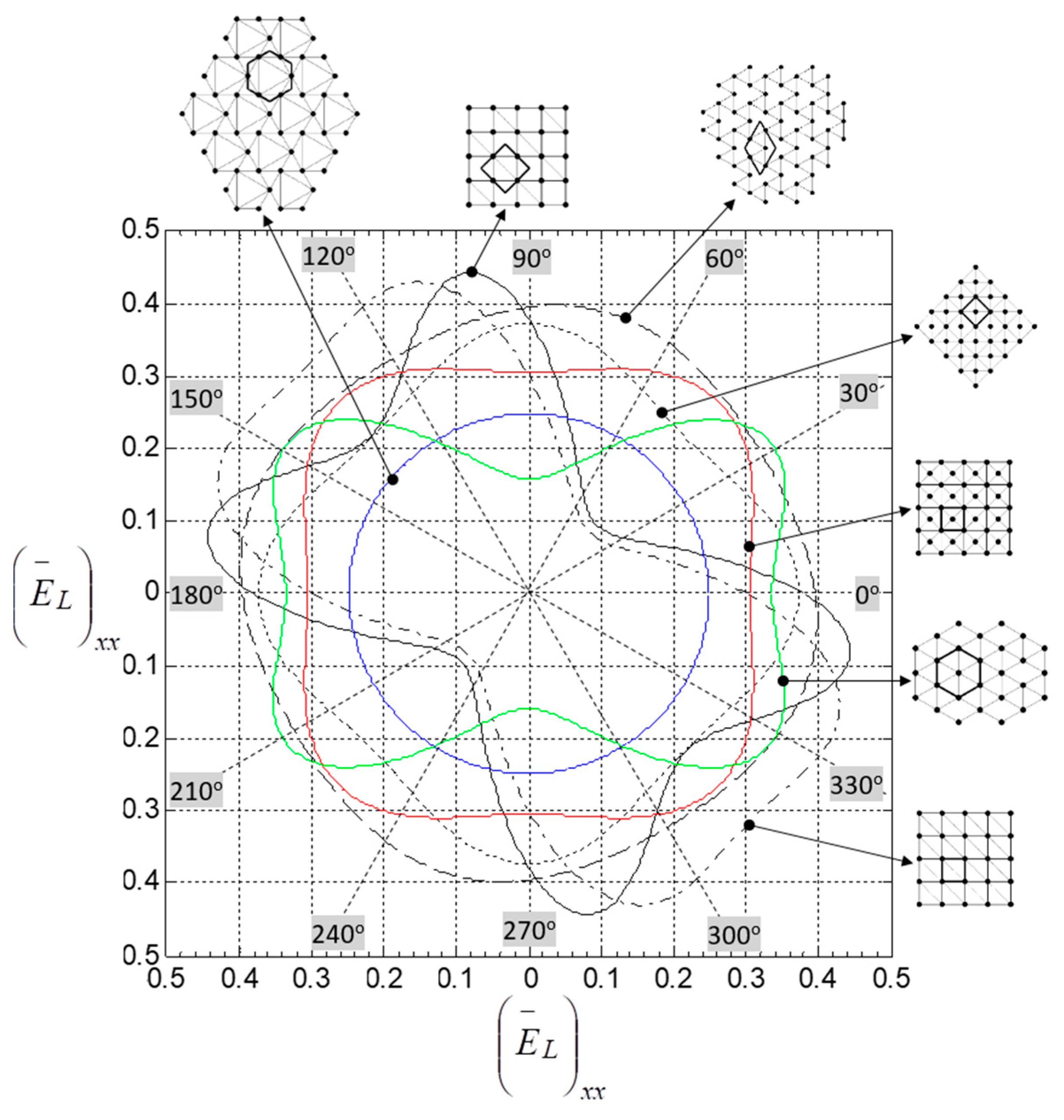
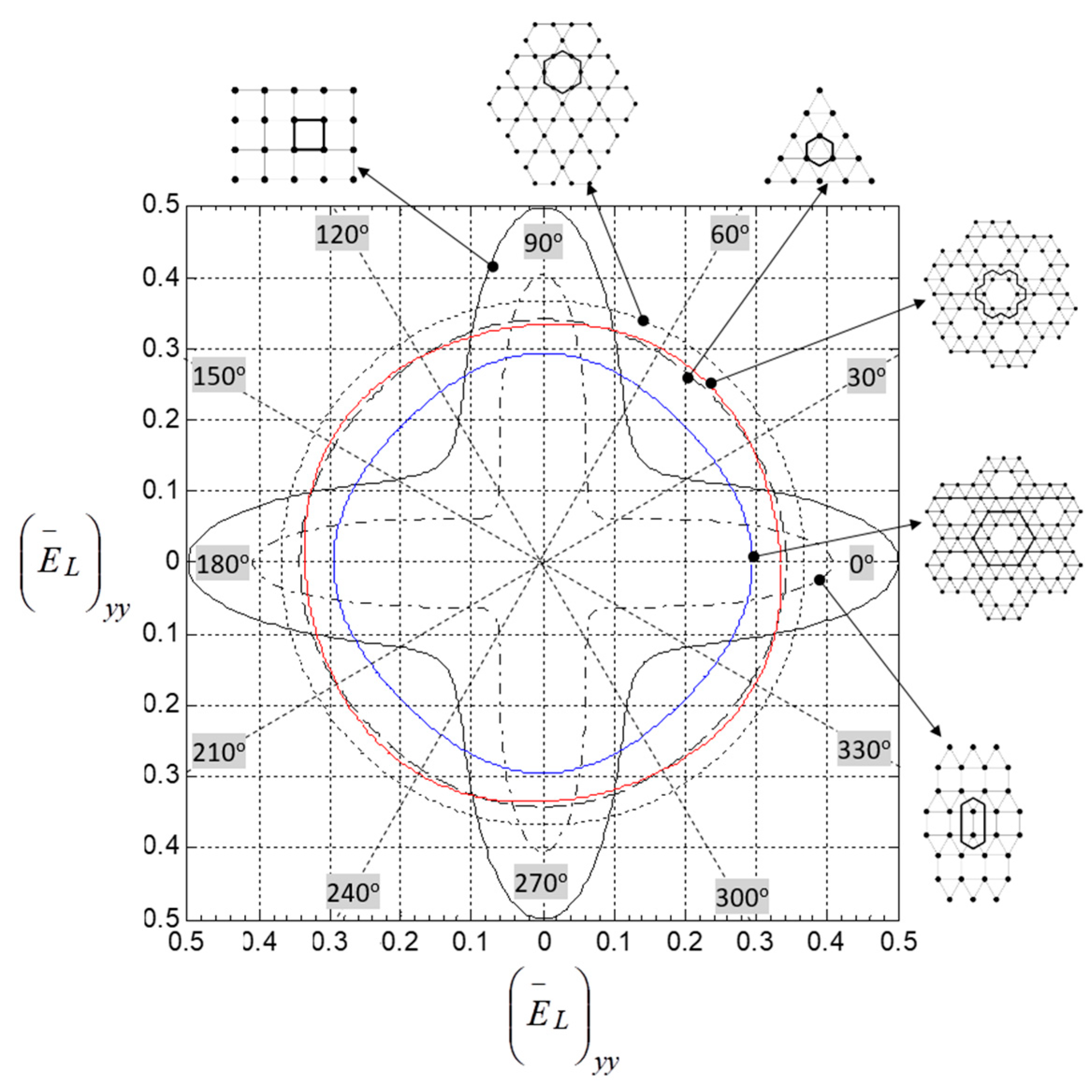
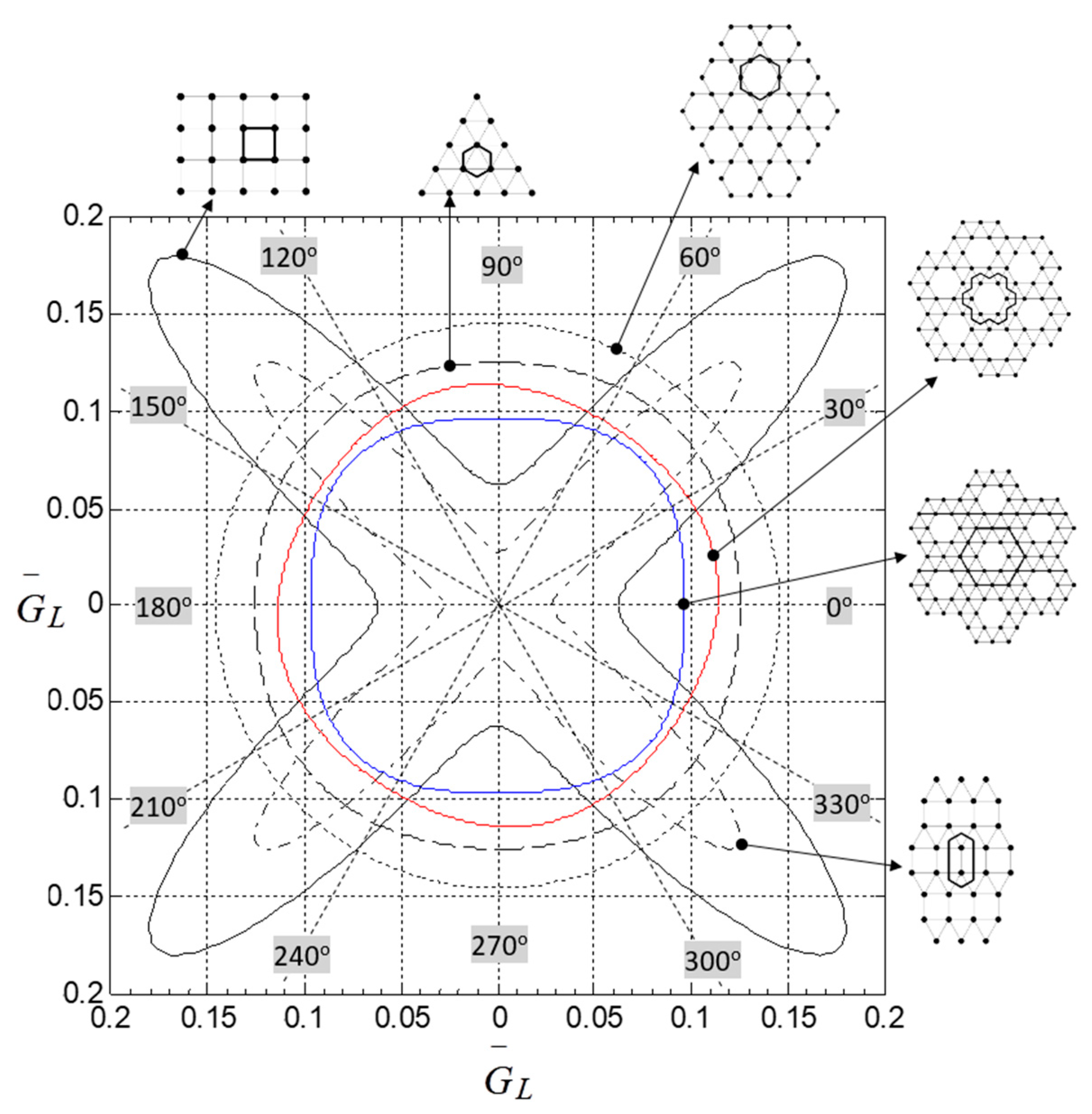
5. Anisotropic Stiffness Response of LMs
To examine the anisotropic behavior of the homogenized stiffness characteristics of LMs, consider an infinitesimal stress field, as depicted in
Figure 15. The 2D stress field
is transformed counterclockwise by an angle
to the stress field
. To transform the material elastic properties from the
coordinates to the
coordinates we resort to the
Bond-stress and strain transformation matrices [
48,
49,
64,
65,
66]. The linearly elastic stress field in the
coordinates can be related to the strain field in the same coordinate system by Hooke’s law [
54]. As demonstrated by Bond [
64], the stress field in the
coordinates,
, can be transformed to a stress field in the
coordinates,
, using the
Bond-Stress Transformation matrix,
, such that:
The 2D
Bond-Stress Transformation matrix is given by:
Similarly, the corresponding strain field in the
coordinates,
, can be transformed to a strain field in the
coordinates,
using the Bond-Strain Transformation matrix,
, such that:
Inverting the matrices in Equations (48) and (50) and substituting the results into stress-strain relation (Hooke’s law), gives:
Here,
where
[
48]. Equation (51) is utilized to compute the transformation of the stiffness properties of LMs through an angle
. The LM relative density is set to unity, i.e.,
,
Figure 16,
Figure 17,
Figure 18,
Figure 19,
Figure 20 and
Figure 21 illustrate the polar diagram of the Young’s modulus (for the
and
directions as well as the shear modulus in the
direction) for the 13 topologies studied in this paper.
6. Discussion and Concluding Remarks
This work presented a method to calculate the elastic properties of micro-truss LMs with rigid-jointed architecture. The procedure consists of four main steps. The first involves the use of classical matrix methods of structural analysis to determine the stiffness properties of the lattice unit cell. In the second, the Bloch’s theorem is employed to generate the irreducible representation of the LM structure. The third resorts to the Cauchy-Born Hypothesis to express the microscopic nodal forces and deformations in terms of a homogenized macro-strain field applied to the lattice. Finally, the Hill-Mandel principle is used to obtain the macro-stiffness properties of the RJLM. The accuracy of the model is verified experimentally.
Using the theoretical model, three set of charts are developed, the first set,
Figure 4,
Figure 5 and
Figure 6, shows the variation of the elastic moduli with respect to their relative density for 13 lattice topologies. Besides cell topology, lattice orientation governs the axial stiffness of the unit cell network, which in turn influences the macroscopic stiffness of the LM. We learn from these charts the importance of examining the lattice resistant to deformation in both axial and shear direction with respect to the macroscopic loading applied to the material. For example, consider the square lattice. Its cell elements are aligned with the direction of the external loadings. Hence, the direct stiffness to mass ratio is the highest among the selected topologies. Its shear stiffness characteristics, however, are the lowest. If a macroscopic loading triggered the element shear stiffness, then its superior stiffness in the axial direction would be overshadowed by its high shear compliance. This example shows that to assess the performance of a lattice, it is necessary to consider the macroscopic load applied to the material as well as the type of deformation that this load triggers on the cell members.
The second set of charts,
Figure 7,
Figure 8 and
Figure 9, has been presented to estimate the errors between theoretical results of pin-jointed micro-trusses and their rigid-jointed counterpart. The charts show the participation of the bending stiffness of stretching dominated unit cell beams to the homogenized macro-stiffness. For a stretching dominated LM, the main observation is that the closer the cell topology to the full triangulation, the less the cell elements contribute to the bending stiffness. In particular, the contribution is negligible for lattice structures that possess no microscopic internal mechanisms in their pin-jointed versions of the lattice. At 0.3 relative density, we find that the bending resistant of the Kagome lattice members contribute up to 1% to the total stiffness of the material. This is the highest contribution among the selected topologies. On the other hand, at the same relative density, the bending stiffness contribution of the cell members is limited to 0.3% for the Uni-Braced square lattice topology, which has internal mechanisms.
Finally, the third set of plots,
Figure 15,
Figure 16,
Figure 17,
Figure 18,
Figure 19 and
Figure 20, includes polar diagrams showing the magnitude of the elastic moduli in response to a load from any in-plane direction. These charts provide insight into their anisotropic as well as indicate the best orientation a LM can be loaded to withstand a macroscopic loading applied in a given direction. For instance, the fully triangulated lattice is isotropic. Its properties represented by a circle are invariant to the direction of the macroscopic loading. The square lattice, on the other hand, has orthotropic characteristics, as illustrated by the four-point star shape of the moduli. The DHT and
topologies exhibit quasi-isotropic stiffness properties as shown by the roughly circular plot of the variation of their elastic moduli correspondent to the direction of macroscopic loading.
The three set of charts depicted in this paper can be used for analysis and design purposes of LM. In general, the charts might help to gain insight into the selection of the best lattice topology for a given design application, as well as to explore the potential of novel lattice topologies in populating unfilled areas of the material properties charts.

























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}