Abstract
The modeling of many problems of practical interest leads to nonlinear ill-posed equations (for example, the parameter identification problem (see the Numerical section)). In this article, we introduce a new source condition (SC) and a new parameter choice strategy (PCS) for the Tikhonov regularization (TR) method for nonlinear ill-posed problems. The new PCS is introduced using a new SC to compute the regularization parameter (RP) before computing the regularized solution. The theoretical results are verified using a numerical example.
1. Introduction
Many problems of practical interest lead to nonlinear ill-posed equations. For example, consider the inverse problem of identifying the distributed growth law in the initial value problem
from the noisy data
If it is the exact case, we can use the variable separable method and obtain that Assume there is a fidelity term added to so that
Taking the derivative with respect to t for finding new we obtain
Note that the magnitude of noise is small (if is small) in (2), but it is large in (3). This is typical of an ill-posed problem (the violation of Hadamard’s criterion [1]). One can reformulate the above problems as an ill-posed operator equation with
The problem is to find x for a given when y is not exactly known. The modeling of problems in acoustics, electrodynamics, gravimetry, phase retrieval, etc., that leads to the solving of ill-posed equations can be found in [2].
Another real-life application occurs in the parameter identification problem when mathematical models used in biology, physics, economics, etc., are often defined by a Partial Differential Equation (PDE) (see Example 1) [3,4]. It is known that in general the solution of such a PDE need not be an elementary function. So, based on the experimental data, one need to obtain the parameters of the mathematical model. This type of problem is known as the parameter identification problem [5].
In this paper, we consider the abstract nonlinear ill-posed equation
where is a nonlinear operator and are Hilbert spaces. Throughout the paper, it is assumed that is weakly/sequentially closed, the continuous operator is a subset of U, has the Fréchet derivative at all and is denoted by , and is the adjoint of the linear operator . We are interested in an -minimum norm solution ( MNS) (see [5,6]) of (5) (here, is an apriori estimate in the interior of see [5,7,8]). Recall that a solution of (5) is called an of (5) if
We assume that does not depend continuously on the data g, and the available data are with
In such a situation, regularization methods are employed to obtain approximation for TR is the well-known regularization method [5,6,8,9,10,11,12,13]. In this method, the minimizer of the Tikhonov functional
for some is taken as an approximation. It is known [5,9] that satisfies the equation
The convergence and rate of convergence of are obtained [5,9,14] under the so-called source conditions (SCs) on Recall that apriori assumptions about the unknown solution are called source conditions [15]. The most commonly used SCs for the TR method are [5,9];
where , is the adjoint of the linear operator , and [16,17]
for
Other types of SCs are also studied in the literature, for example, the generalized source condition [16,17,18,19,20] and variational source condition [21,22,23,24,25].
In this paper, we introduce a new SC, i.e, we assume that
where It is known that [5,8,14,16], under the SCs (9) and (10) the best possible rate of convergence of is We shall prove that the SC (11) also gives the convergence rate (hereafter, we call the Hölder-type parameter). We formulate the new SC to introduce a new PCS (this stategy is apriori in the sense that the RP is chosen depending on and before computing the regularized solution ) to choose The new PCS gives the order
Note that most of the apriori PCS depends on the unknown in the SC. The advantages of our proposed PCS are (i) it is independent of the parameter , (ii) it provides the order for , and (iii) it is apriori in the sense that it is computed before computing the regularized solution
In earlier studies such as [10,11,20,26,27,28], the regularization parameter , depending on the iteration step, is computed in each iteration, and the stopping index is determined using some stopping criteria [11,20,26,27,28]. This apprach is computationally very expensive, but our approach requires the computation of only once (here, is independent of the iteration step); hence, one can also fix the stopping index for a given tolerence level in the beginning of the computation (see the comparison table in Example 1).
The above-mentioned advantages are obtained without actually using the operator L for computing and (or the iteratively regularized solution).
Another class of regularization methods is the so-called iterative regularization methods [26,27,28,29,30,31,32,33,34,35,36] (and the reference therein). Since our aim in this paper is to introduce a new PCS that allows us to compute the RP (depending on and ) before computing the regularized solution we leave the details of the above-mentioned (except (11)) source conditions and iterative regularization methods to motivated readers.
2. Error Analysis
The proof of our results is based on the following assumptions (cf. [5,9]).
- (i)
- ∃ constant and a continuous function such that for , there is a such thatwhere
- (ii)
- ∃ constant and a continuous function such that for , there is a such thatwhere
- (iii)
- ∃ constant and a continuous function such that for , there is a such thatwhere
- (iv)
- ∃ constant and a continuous function such that for , there is a such thatwhere
Remark 1.
(a) Note that, by (ii) above, we have
where for some constant provided is bounded.
- (b)
- Using the above assumptions, one can prove the following identities (proof of which is given in Appendix A). Let Then,and
- (c)
- We will be using the following estimates:and
Similarly, we have
First, we shall prove that implies and implies for
Proposition 1.
Suppose (i) and (iii) hold. Then, the following hold:
- (P1)
- for some
- (P2)
- for some
Proof.
The proof is given in Appendix B. □
Remark 2.
Similarly, one can prove
- (P1′)
- for someand
- (P2′)
- for some
Remark 3.
Proposition 1 shows that SC (11) is not a severe restriction, but it almost follows from SC (9) or SC (10). But the advantage of using SC (11), as mentioned in the introduction, is that one can compute the regularization parameter α (depending on and δ) before computing the regularized solution (see Section 3).
Lemma 1.
Proof.
The proof is given in Appendix C. □
Lemma 2.
Suppose (11) and the assumptions (i)–(iii) hold. Then,
Proof.
The proof is given in Appendix D. □
Next, we prove the main result of this Section using Lemma 1 and Lemma 2.
Theorem 1.
Let the assumptions in Lemmas 1 and 2 hold. Then,
where In particular, for we have
Proof.
Since,
the result follows from Lemma 1 and Lemma 2. □
Remark 4.
Note that the apriori parameter choice gives the order for But, ν is unknown, so such a choice is impossible when it comes to practical cases. So, we consider a new PCS that does not require knowledge of the unknown parameter ν and provide the order for and for
3. New Parameter Choice Strategy
Let
where
Theorem 2.
The function for defined in (24), is monotonically increasing, continuous, and
where P is the orthogonal projection onto the null space of
Proof.
See Lemma 1 in [18]. □
Further, we assume
for some .
The application of the intermediate value theorem gives the following theorem.
We will be using the following moment inequality:
where B is positive selfadjoint operator (see [37]).
Lemma 3.
Proof.
The proof is given in Appendix E. □
Lemma 4.
Proof.
The proof is given in Appendix F. □
Theorem 4.
Suppose that the assumptions in Lemmas 1–4 hold. Then,
Proof.
Since,
the proof follows from Lemmas 1–4. □
Remark 5.
Note that satisfies (26) and is independentof ν and gives the order for and for Also, observe that the PCS does not depend on the operator L and that the regularization parameter α is computed before computing .
4. Numerical Example
Next, we provide an example satisfying the assumptions (i)–(iv).
Example 1.
Here, the problem is to find q satisfying the two-point boundary value problem
where and are given. This problem can be written as an operator equation of the form where is a nonlinear operator and satisfies (28). Here,
where
Then,
for where satisfies
Assumptions (i) and (ii) are verified in [5]. The verification of assumptions (iii) and (iv) is given in Appendix G.
We estimate the parameter α using PCS (26). To compute in (8), we use the Gauss–Newton method, which defines the iterate for by
Since we are estimating q, we will use the notation for , for , and for in the example.
We take and as in [28]. Then, For our computation, we use random noise data so that Further, we have taken the initial approximation as We have used a finite difference method for solving the differential equations involved in the computation by dividing into 100 subintervals of equal length, and the resulting tridiagonal system has been solved by the Thomas algorithm [38].
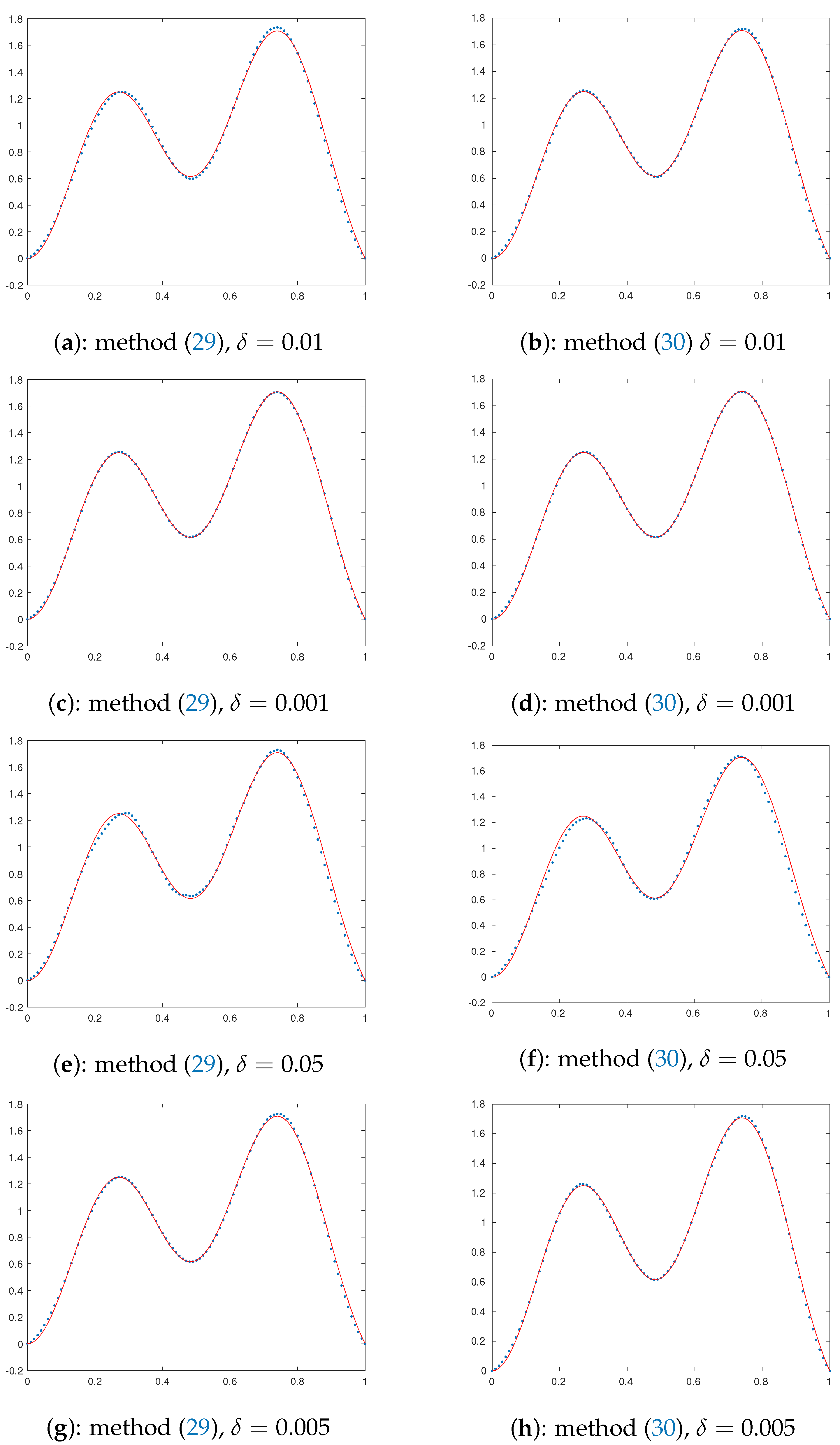
We have taken in (26) to compute Table 1 gives the values of the parameter computed using (26), and the error and time taken to compute for different values of The corresponding figures are provided in Figure 1.

Table 1.
Computed and computed error.
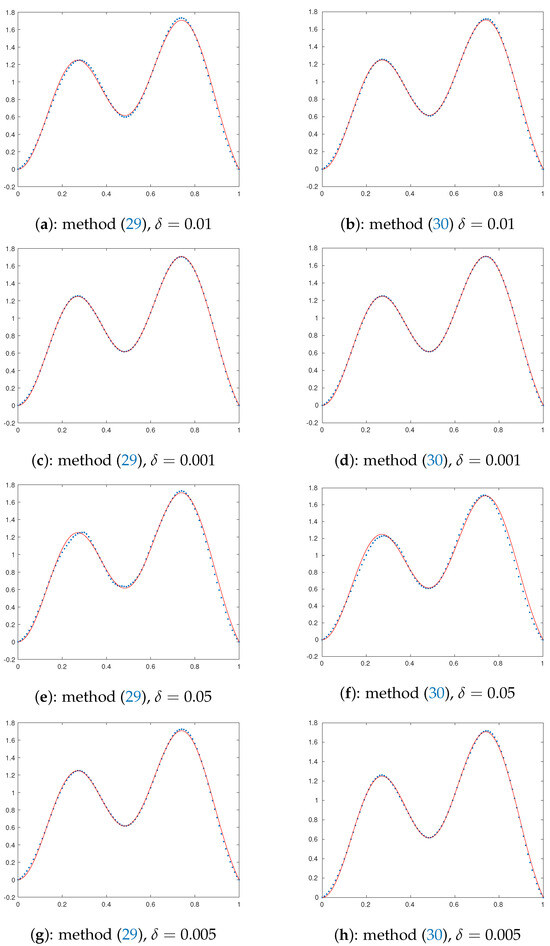
Figure 1.
Exact () and computed solutions () for various parameters given against each subfigure.
We compare our method with that of the most widely used iterative method [26] for (5), which is the regularized Gauss Newton method, in which the iterations are defined for by
where Here, is a given sequence of numbers such that
for some constant
Stopping index: Choose as the first positive integer that satisfies
where is a sufficiently large constant not depending on We have taken and in our computations.
We use a 4-core 64 bit Windows machine with 11th Gen Intel(R) Core(TM) i5-1135G7 CPU @ 2.40GHz for all our computations (using MATLAB).
Clearly, the table shows that our approach requires less computational time than that of method (30).
5. Conclusions
We introduced a new SC and a new PCS for the TR of nonlinear ill-posed problems. Our PCS does not require knowledge of , and it gives the error estimate
The advantage of our method is that one can compute the RP before computing the regularized solution We also applied the method to the parameter identification problem modeled as in Example 1 and obtained favourable numerical results.
Author Contributions
Conceptualization, S.G., J.P., A.K., I.K.A. and S.R.; methodology, S.G., J.P., A.K., I.K.A. and S.R.; software, S.G., J.P., A.K., I.K.A. and S.R.; validation, S.G., J.P., A.K., I.K.A. and S.R.; formal analysis, S.G., J.P., A.K., I.K.A. and S.R.; investigation, S.G., J.P., A.K., I.K.A. and S.R.; resources, S.G., J.P., A.K., I.K.A. and S.R.; data curation, S.G., J.P., A.K., I.K.A. and S.R.; writing—original draft preparation, S.G., J.P., A.K., I.K.A. and S.R.; writing—review and editing, S.G., J.P., A.K., I.K.A. and S.R.; visualization, S.G., J.P., A.K., I.K.A. and S.R.; supervision, S.G., J.P., A.K., I.K.A. and S.R.; project administration, S.G., J.P., A.K., I.K.A. and S.R.; funding acquisition, S.G., J.P., A.K., I.K.A. and S.R. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external funding.
Data Availability Statement
No new data were created or analyzed in this study. Data sharing is not applicable to this article.
Conflicts of Interest
The authors declare no conflicts of interest.
Appendix A. Proof of the Identities (17)–(20)
Using assumption (i), we have
and using (iii), we have
and by (i) and (iii);
Further, using (ii), (iv), and Remark 1 (a) and (c), we obtain
Appendix B. Proof Proposition 1
Suppose Then, by (i) and (iii) we have
where Further, we have
This proves (). To prove (), we use the formula ([37], p. 287) for the fractional power of positive self-adjoint operators given by
where
and is a complex number such that
Suppose that Then, by using the above formula, we have
So, by using (i) and (iii) we have
so, for we have
where
Further, by (i) and (iii) we have
By spliting the limit of intergration and rearranging the terms, we obtain
Now, using the relations , and we have
This proves ().
Appendix C. Proof of Lemma 1
Observe that,
and
So, we have
or
Let
Then, by (A1) we have,
Therefore,
Appendix D. Proof of Lemma 2
Since and we have
and
Since by (A3) we have
Next, we shall prove that under the assumption (11).
Note that
Appendix E. Proof of Lemma 3
Let Then, by (27), we have
Here, we have used the relations where is the unitary operator and Observe that,
Appendix G. Verification of Assumptions (iii) and (iv)
As in [5], we use the following assumptions:
- (A1)
- Let , and assume that ∃ with ∀ Then, ∃ of in such that
- (A2)
- for all and
Note that,
so, we have for :
where Then, as in Lemma 2.4 in [5], one can prove that Further, observe that
where Again, as in Lemma 2.4 in [5], one can prove that
References
- Hadamard, J. Lectures on Cauchy’s Problem in Linear Partial Differential Equations; Dover Publications: New York, NY, USA, 1953. [Google Scholar]
- Ramm, A.G. Inverse Problems: Mathematical and Analytical Techniques with Applications to Engineering; Springer: New York, NY, USA, 2004. [Google Scholar]
- Akimova, E.N.; Misilov, V.E.; Sultanov, M.A. Regularized gradient algorithms for solving the nonlinear gravimetry problem for the multilayered medium. Math. Methods Appl. Sci. 2020, 21, 7012. [Google Scholar] [CrossRef]
- Byzov, D.; Martyshko, P. Three-Dimensional Modeling and Inversion of Gravity Data Based on Topography: Urals Case Study. Mathematics 2024, 12, 837. [Google Scholar] [CrossRef]
- Scherzer, O.; Engl, H.W.; Kunisch, K. Optimal a posteriori parameter choice for Tikhonov regularization for solving nonlinear ill-posed problems. SIAM. J. Numer. Anal. 1993, 30, 1796–1838. [Google Scholar] [CrossRef]
- Engl, H.W.; Hanke, M.; Neubauer, A. Regularization of Inverse Problems; Kluwer Academic Publisher: Dordrecht, The Netherlands; Boston, MA, USA; London, UK, 1996. [Google Scholar]
- Flemming, J. Generalized Tikhonov Regularization and Modern Convergence Rate Theory in Banach Spaces; Shaker Verlag: Aachen, Germany, 2012. [Google Scholar]
- Mair, B.A. Tikhonov regularization for finitely and infinitely smoothing operators. SIAM J. Math. Anal. 1994, 25, 135–147. [Google Scholar] [CrossRef]
- Engl, H.W.; Kunisch, K.; Neubauer, A. Convergence rates for Tikhonov regularization of nonlinear ill-posed problems. Inverse Probl. 1989, 5, 523–540. [Google Scholar] [CrossRef]
- Jin, Q.N.; Hou, Z.Y. On the choice of regularization parameter for ordinary and iterated Tikhnov regularization of nonlinear ill-posed problems. Inverse Probl. 1997, 13, 815–827. [Google Scholar] [CrossRef]
- Jin, Q.N.; Hou, Z.Y. On an a posteriori parameter choice strategy for Tikhnov regularization of nonlinear ill-posed problems. Numer. Math. 1999, 83, 139–159. [Google Scholar]
- Rieder, A. On the regularization of nonlinear ill-posed problems via inexact Newton iterations. Inverse Probl. 1999, 15, 309–327. [Google Scholar] [CrossRef]
- Vasin, V.; George, S. Expanding the applicability of Tikhonov’s regularization and iterative approximation for ill-posed problems. J. Inverse -Ill-Posed Probl. 2014, 22, 593–607. [Google Scholar] [CrossRef]
- Blaschke, B. Some Newton Type Methods for the Regularization of Nonlinear Ill-posed Problems. Trauner 1996, 13, 729. [Google Scholar]
- Nair, M.T. Linear Operator Equations: Approximation and Regularization; World Scientific: Singapore, 2009. [Google Scholar]
- Argyros, I.K.; George, S.; Jidesh, P. Inverse free iterative methods for nonlinear ill-posed operator equations. Int. J. Math. Math. Sci. 2014, 2014, 754154. [Google Scholar] [CrossRef]
- George, S. On conversence of regularized modified Newton’s method for nonlinear ill-posed problems. J. Inv. Ill-Posed Probl. 2010, 18, 133–146. [Google Scholar] [CrossRef]
- George, S.; Nair, M.T. An a posteriori parameter choice for simplified regularization of ill-posed problems. Inter. Equat. Oper. Th. 1993, 16, 392–399. [Google Scholar] [CrossRef]
- Hohage, T. Logarithmic convergence rates of the iteratively regularized Gauß-Newton method for an inverse potential and an inverse scattering problem. Inverse Probl. 1997, 13, 1279–1299. [Google Scholar] [CrossRef]
- Mahale, P.; Singh, A.; Kumar, A. Error estimates for the simplified iteratively regularized Gauss-Newton method under a general source condition. J. Anal. 2022, 31, 295–328. [Google Scholar] [CrossRef]
- Chen, D.; Yousept, I. Variational source condition for ill-posed backward nonlinear Maxwell’s equations. Inverse Probl. 2019, 35, 025001. [Google Scholar] [CrossRef]
- Hohage, T.; Weidling, F. Verification of a variational source condition for acoustic inverse medium scattering problems. Inverse Probl. 2015, 31, 075006. [Google Scholar] [CrossRef]
- Hohage, T.; Weidling, F. Variational source condition and stability estimates for inverse electromagnetic medium scattering problems. Inverse Probl. 2017, 11, 203–220. [Google Scholar]
- Hohage, T.; Weidling, F. Characerizations of variational source conditions, converse results, and maxisets of spectral regularization methods. SIAM J. Numer. Anal. 2017, 55, 598–620. [Google Scholar] [CrossRef]
- Hofmann, B.; Kaltenbacher, B.; Póschl, C.; Scherzer, O. A convergence rates result for Tikhonov regularization in Banach spaces with non-smooth operators. Inverse Probl. 2007, 23, 987–1010. [Google Scholar] [CrossRef]
- Jin, Q. On the iteratively regularized Gauss-Newton method for solving nonlinear ill-posed problems. Math. Comput. 2000, 69, 1603–1623. [Google Scholar]
- Jin, Q. A convergence analysis of the iteratively regularized Gauss-Newton method under Lipschitz condition. Inverse Probl. 2008, 24, 045002. [Google Scholar] [CrossRef]
- Mahale, P.; Dixit, S.K. Convergence analysis of simplified iteratively regularized Gauss-Newton method in a Banach space setting. Appl. Anal. 2017, 97, 1386785. [Google Scholar] [CrossRef]
- Bakushinskii, A. The problem of the convergence of the iterativley regularized Gauß-Newton method. Comput. Maths. Math. Phys. 1992, 32, 1353–1359. [Google Scholar]
- Bakushinskii, A. Iterative methods without saturation for solving degenerate nonlinear operator equations. Dokl. Akad. Nauk. 1995, 1, 7–8. [Google Scholar]
- Bakushinskii, A.; Kokurin, M. Iterative Methods for Approximate Solution of Inverse Problems; Springer: Berlin/Heidelberg, Germany, 2004. [Google Scholar]
- Blaschke, B.; Neubauer, A.; Scherzer, O. On convergence rates for the iteratively regularized Gauß-Newton method. Ima J. Numer. Anal. 1997, 17, 421–436. [Google Scholar] [CrossRef]
- Deuflhard, P.; Engl, H.W.; Scherzer, O. A convergence analysis of iterative methods for the solution of nonlinear ill-posed problems under affinely invariant conditions. Inverse Probl. 1998, 14, 1081–1106. [Google Scholar] [CrossRef]
- Hanke, M. Regularizing properties of a truncated Newton-CG algorithm for nonlinear inverse problems. Numer. Funct. Anal. Optim. 1997, 18, 971–993. [Google Scholar] [CrossRef]
- Kaltenbacher, B. A posteriori parameter choice strategies for some Newton type methods for the regularization of nonlinear ill-posed problems. Numer. Math. 1998, 79, 501–528. [Google Scholar] [CrossRef]
- Mahale, P. Simplified Generalized Gauss-Newton iterative method under Morozove type stopping rule. Numer. Funct. Anal. Optim. 2015, 36, 1448–1470. [Google Scholar] [CrossRef]
- Krasnoselskii, M.A.; Zabreiko, P.P.; Pustylnik, E.I.; Sobolevskii, P.E. Integral Operators in Spaces of Summable Functions; Noordhoff International Publ.: Leyden, IL, USA, 1976. [Google Scholar]
- Ford, W. Numerical Linear Algebra with Applications; Academic Press: New York, NY, USA, 2015; pp. 163–179. [Google Scholar]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).