


A Novel Hybrid Internal Pipeline Leak Detection and Location System Based on Modified Real-Time Transient Modelling

 ,
,  ,
, 
Abstract
1. Introduction
1.1. Motivation
1.2. Literature Review
1.3. Research Gaps
1.4. Methodology
1.5. Contributions
1.6. Paper Organization
2. Problem Formulation
3. Leak Detection and Accurate Leak Location
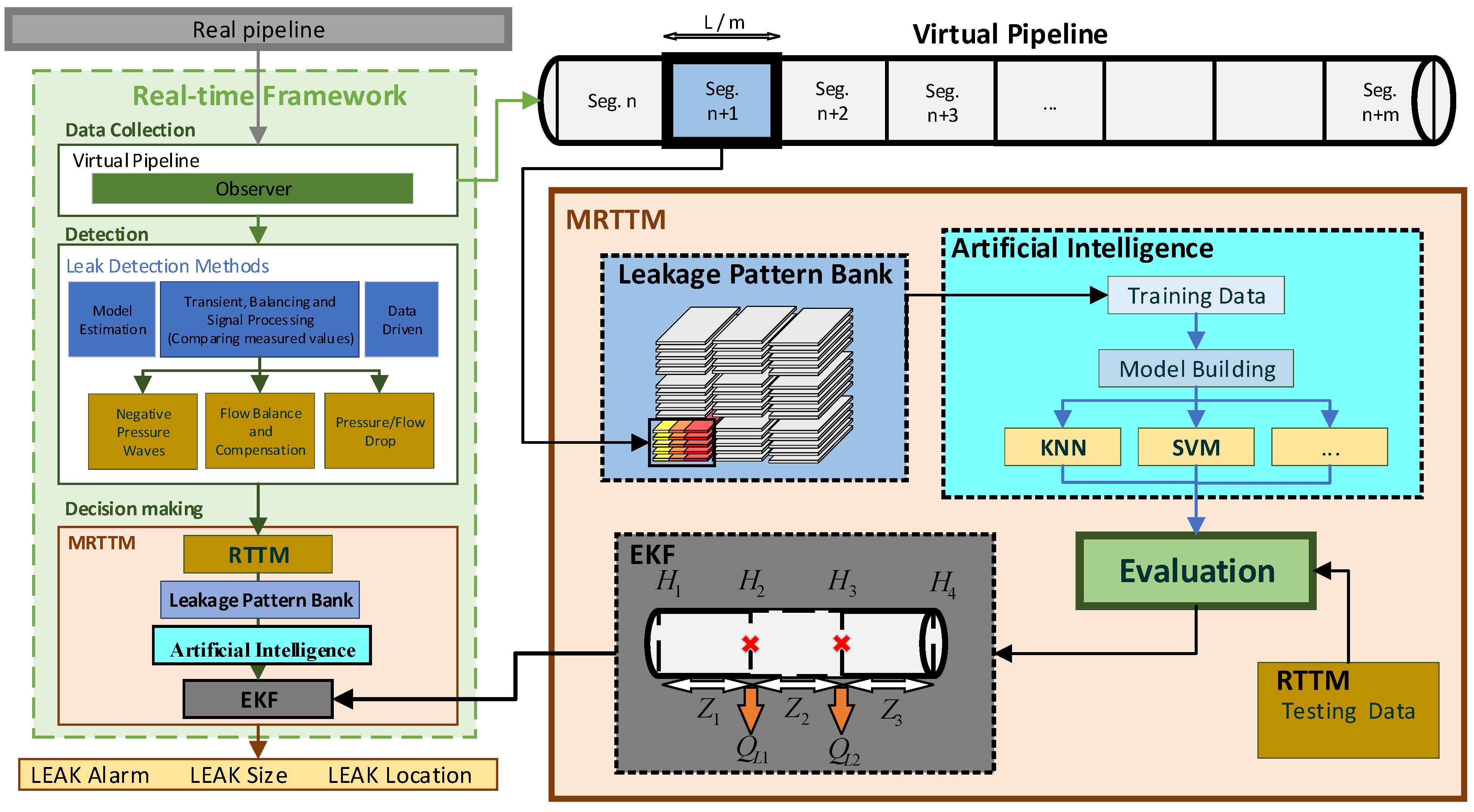
3.1. AI-Empowered MRTTM Framework
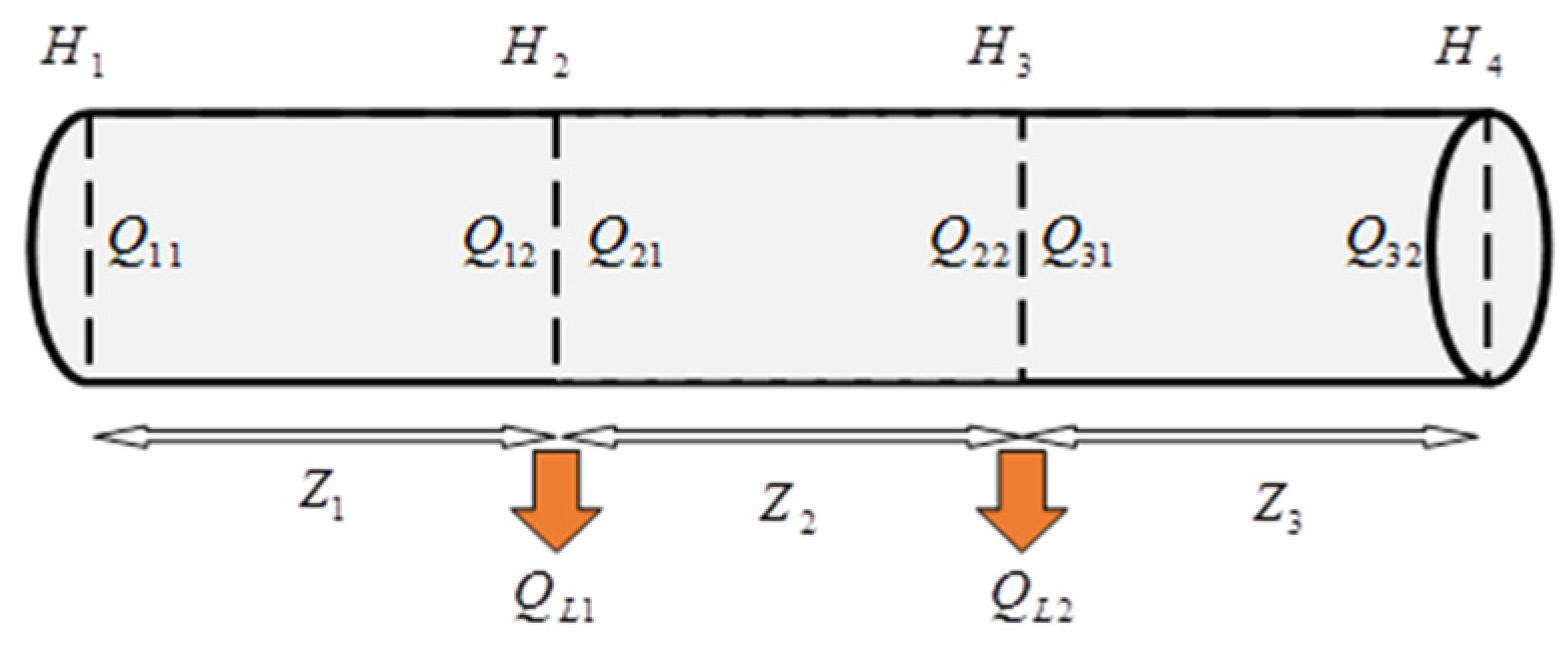
3.2. Modified Real-Time Transient Modelling (MRTTM) Method
4. Experiment and Analysis
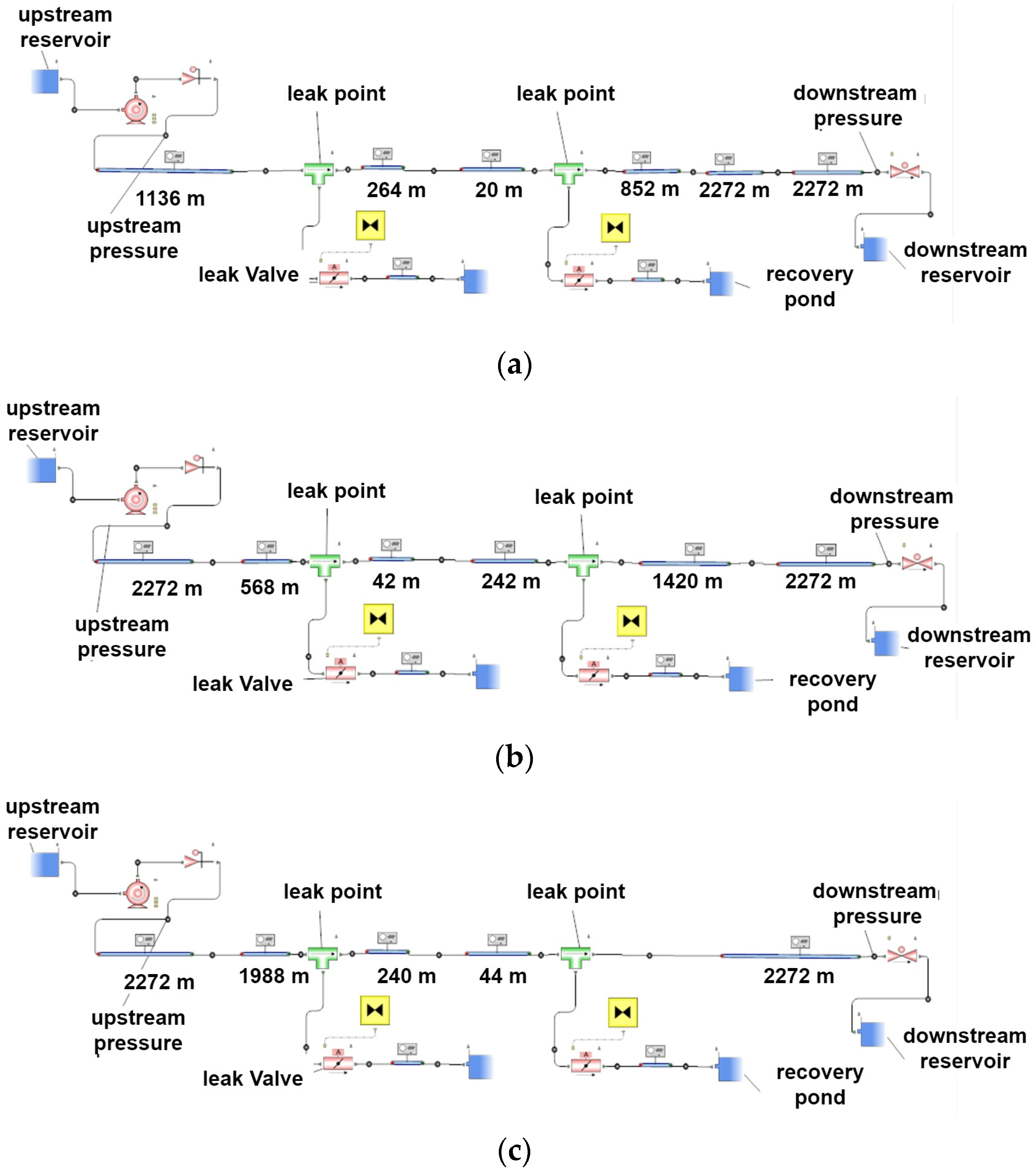
4.1. Methodology and Simulation Setup
4.2. Accuracy Enhancement Techniques
4.3. Classifier Performance and Scenario Analysis
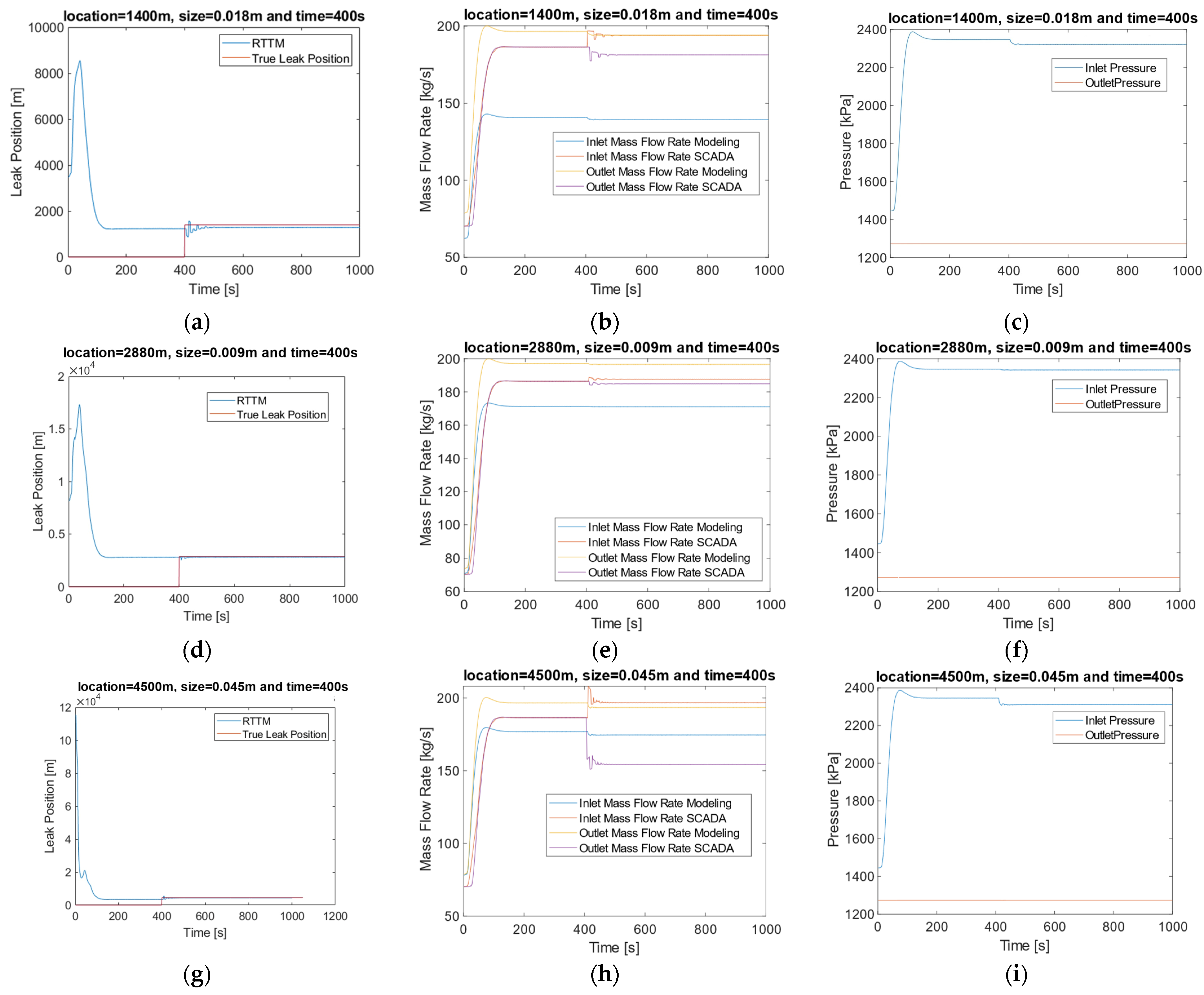
4.4. Detailed Results and Comparison
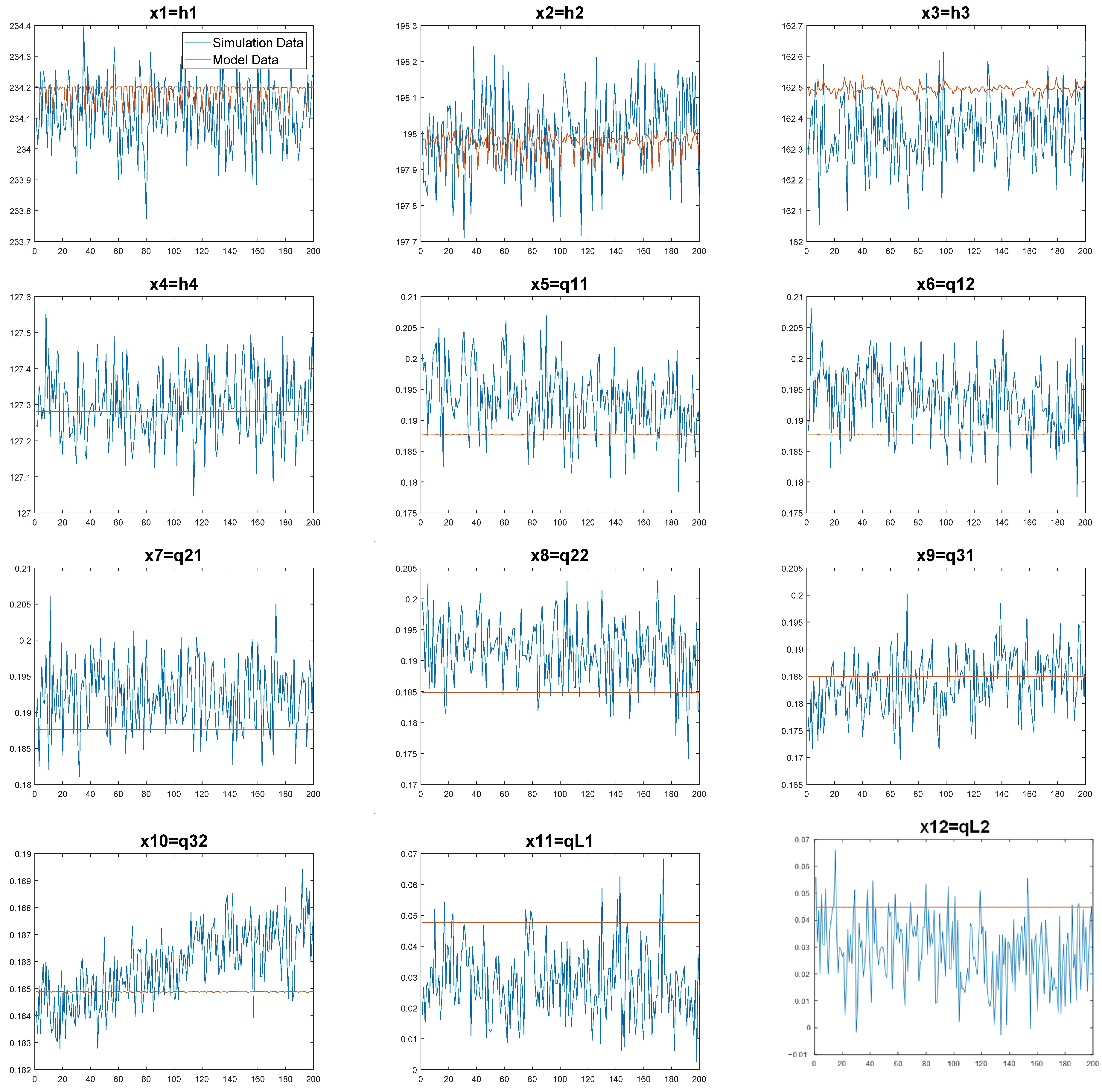
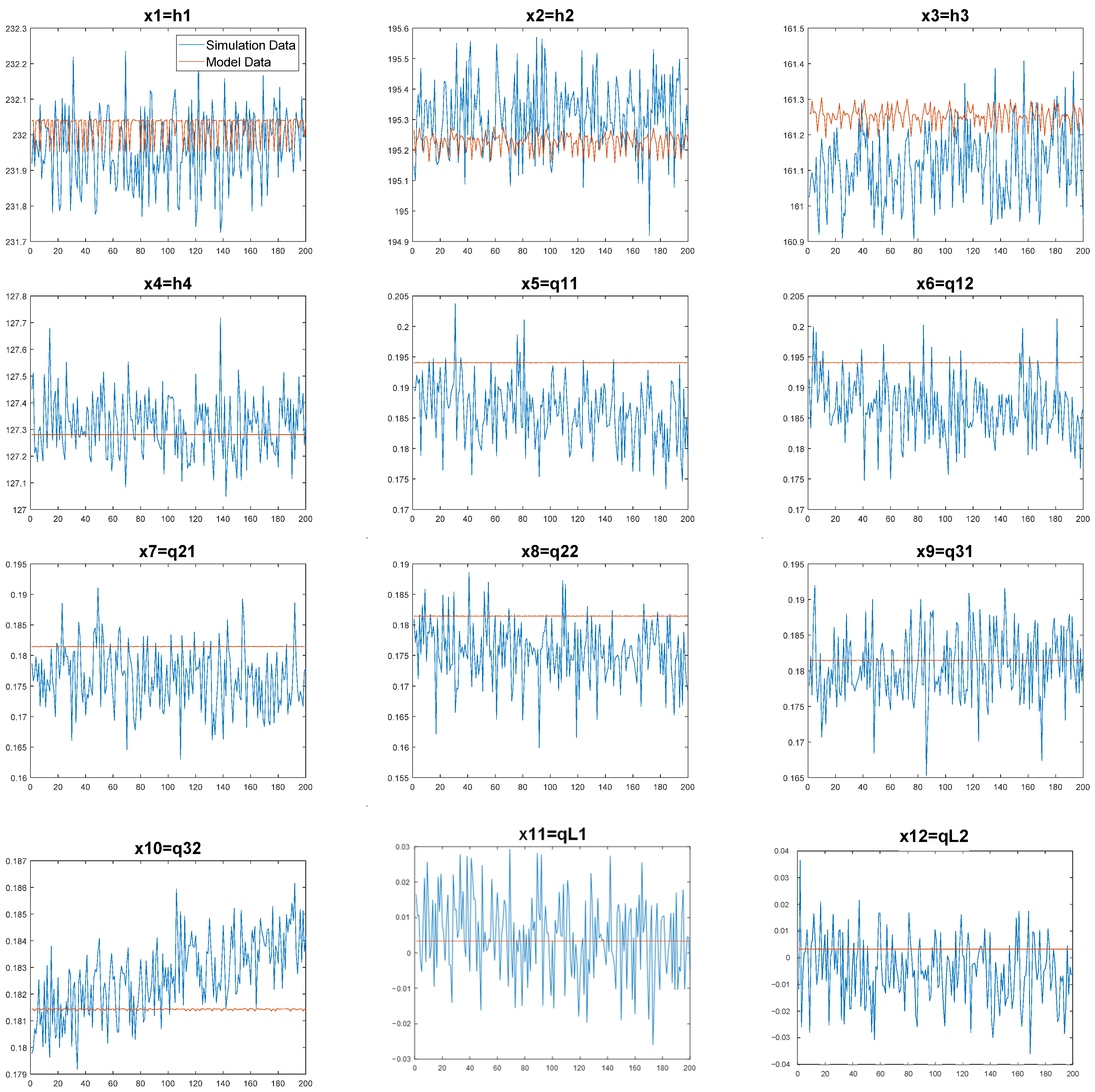
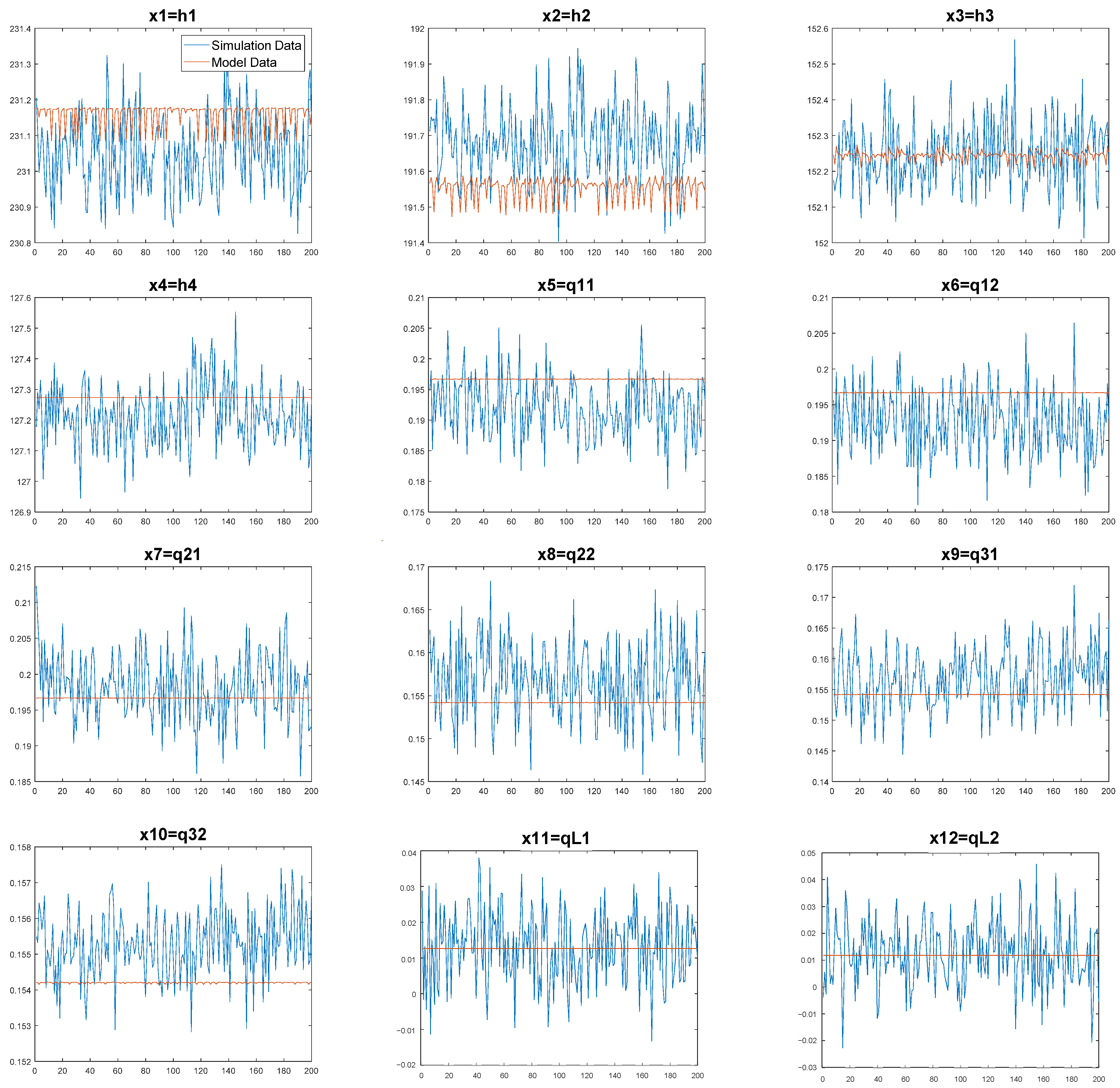
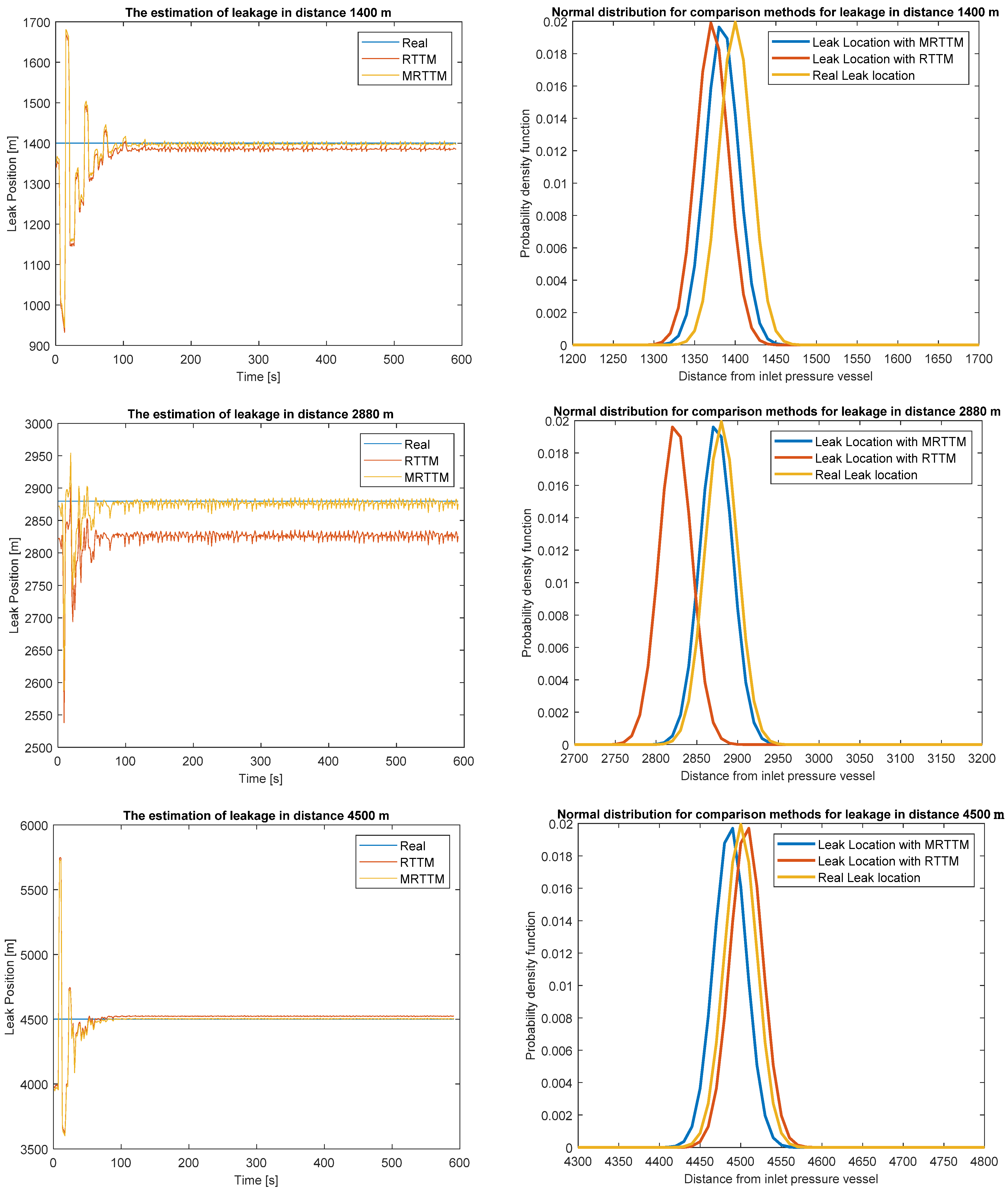
4.5. Evaluation of RTTM vs. MRTTM
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Nomenclature
| Variables | Description |
| Head pressure at the beginning/end of the pipeline | |
| The measured difference between real and simulated input/output | |
| Pipeline’s pressure head (m) | |
| q | ) |
| c | ) |
| g | ) |
| A | Pipe’s cross-sectional area (m2) |
| d | Pipe’s diameter (m) |
| f | Coefficient of friction |
| t | Time (s) |
| Leakage stream | |
| Leakage pressure head | |
| Leakage constant | |
| Leakage flow rate | |
| Input/output flow rate | |
| Reynolds number | |
| X | Sensor data collected from the pipeline system |
| Data transferred from the LPB | |
| machine learning model | |
| Estimated leak location | |
| Pressures measured at the inlet/outlet | |
| Mass flow calculated at the inlet/outlet | |
| Mass flow measured at the inlet/outlet | |
| Leakage rate calculated | |
| Leak location | |
| Time step | |
| K | Kalman’s gain |
| Expected state | |
| Estimation error covariance matrix | |
| Predicted state | |
| The covariance matrix for predicted error | |
| Noise measure | |
| Processing covariance matrices | |
| Pressure sensor | |
| Leak discharge coefficient | |
| Leak orifice flow area |
References
- Hochgesang, R. E-RTTM: A Multidimensional Approach to Pipeline Leak Detection. In Proceedings of the Offshore Technology Conference Asia, Kuala Lumpur, Malaysia, 20–23 March 2018. [Google Scholar]
- Guidebook, E.R. Pipeline and Hazardous Materials Safety Administration; US Department of Transportation: Washington, DC, USA, 2012.
- Burr, A.S.; Frazier, C.M.; Toth, S.D. API Pipeline Safety Management System PSMS Third-Party Assessment Program: A Valuable Tool to Help Industry Implement PSMS. In Proceedings of the Abu Dhabi International Petroleum Exhibition and Conference, Abu Dhabi, United Arab Emirates, 15–18 November 2021. [Google Scholar]
- Rostamy, N.; Yurchevich, J.D.; Guenther, S.; Bevevino, J.A.; Bidmus, H. A Process for Selection of Leak Detection Systems for a Pipeline. In Proceedings of the PSIG Annual Meeting, San Diego, CA, USA, 10–13 May 2022. [Google Scholar]
- Woldesellasse, H.; Tesfamariam, S. Risk analysis of onshore oil and gas pipelines: Literature review and bibliometric analysis. J. Infrastruct. Intell. Resil. 2023, 100052. [Google Scholar] [CrossRef]
- Torres, L.; Jiménez-Cabas, J.; González, O.; Molina, L.; López-Estrada, F.-R. Kalman filters for leak diagnosis in pipelines: Brief history and future research. J. Mar. Sci. Eng. 2020, 8, 173. [Google Scholar] [CrossRef]
- Datta, S.; Sarkar, S. A review on different pipeline fault detection methods. J. Loss Prev. Process Ind. 2016, 41, 97–106. [Google Scholar] [CrossRef]
- Zhou, S.; O’Neill, Z.; O’Neill, C. A review of leakage detection methods for district heating networks. Appl. Therm. Eng. 2018, 137, 567–574. [Google Scholar] [CrossRef]
- Sekhavati, J.; Hashemabadi, S.H.; Soroush, M. Computational methods for pipeline leakage detection and localization: A review and comparative study. J. Loss Prev. Process Ind. 2022, 77, 104771. [Google Scholar] [CrossRef]
- Nkemeni, V.; Mieyeville, F.; Tsafack, P. A distributed computing solution based on distributed kalman filter for leak detection in WSN-based water pipeline monitoring. Sensors 2020, 20, 5204. [Google Scholar] [CrossRef]
- Baroudi, U.; Al-Roubaiey, A.A.; Devendiran, A. Pipeline leak detection systems and data fusion: A survey. IEEE Access 2019, 7, 97426–97439. [Google Scholar] [CrossRef]
- Zaman, D.; Tiwari, M.K.; Gupta, A.K.; Sen, D. A review of leakage detection strategies for pressurised pipeline in steady-state. Eng. Fail. Anal. 2020, 109, 104264. [Google Scholar] [CrossRef]
- Varga, A. Solving fault diagnosis problems. In Studies in Systems, Decision and Control, 1st ed.; Springer International Publishing: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Shen, Y.; Ruijsch, J.; Lu, M.; Sutanudjaja, E.H.; Karssenberg, D. Random forests-based error-correction of streamflow from a large-scale hydrological model: Using model state variables to estimate error terms. Comput. Geosci. 2022, 159, 105019. [Google Scholar] [CrossRef]
- Razvarz, S.; Jafari, R.; Gegov, A.; Razvarz, S.; Jafari, R.; Gegov, A. Leakage detection in pipeline based on second order extended Kalman filter observer. Flow Model. Control Pipeline Syst. A Form. Syst. Approach 2021, 52, 161–174. [Google Scholar]
- Liu, P.; Li, S.; Wang, Z. Multi-leak diagnosis and isolation in oil pipelines based on Unscented Kalman filter. In Proceedings of the 2018 Chinese Control And Decision Conference (CCDC), Shenyang, China, 9–11 June 2018. [Google Scholar]
- Doshmanziari, R.; Khaloozadeh, H.; Nikoofard, A. Unscented Kalman Filter in Gas pipeline leakage magnitude estimation and localization. In Proceedings of the 2019 6th International Conference on Control, Instrumentation and Automation (ICCIA), Sanandaj, Iran, 30–31 October 2019. [Google Scholar]
- Yi, K.; Cai, C.; Liao, R. Research on Distributed Optical Fiber Pipeline Micro Leakage Detection Technology Based on Recursive Least Square. In Journal of Physics: Conference Series, Proceedings of the 4th International Conference on Energy Systems and Electrical Power (ICESEP 2022), Hangzhou, China, 20–22 May 2022; IOP Publishing: Bristol, UK, 2022. [Google Scholar]
- Mursyitah, D.; Delouche, D.; Zhang, T.; Kratz, F. Leak Detection and Localization in Pipeline System. In Proceedings of the 2022 10th International Conference on Systems and Control (ICSC), Marseille, France, 23–25 November 2022. [Google Scholar]
- He, N.; Qian, C.; Li, R.; Zhang, M. An improved pipeline leak detection and localization method based on compressed sensing and event-triggered particle filter. J. Frankl. Inst. 2021, 358, 8085–8108. [Google Scholar] [CrossRef]
- Adegboye, M.A.; Fung, W.-K.; Karnik, A. Recent advances in pipeline monitoring and oil leakage detection technologies: Principles and approaches. Sensors 2019, 19, 2548. [Google Scholar] [CrossRef] [PubMed]
- Korlapati, N.V.S.; Khan, F.; Noor, Q.; Mirza, S.; Vaddiraju, S. Review and analysis of pipeline leak detection methods. J. Pipeline Sci. Eng. 2022, 2, 100074. [Google Scholar] [CrossRef]
- Geiger, G.; Vogt, D. A combined leak detection method using pattern recognition techniques. In Proceedings of the 2014 10th International Pipeline Conference, Baltimore, MD, USA, 6 May 2014. [Google Scholar]
- Van der Walt, J.; Heyns, P.S.; Wilke, D.N. Pipe network leak detection: Comparison between statistical and machine learning techniques. Urban Water J. 2018, 15, 953–960. [Google Scholar] [CrossRef]
- da Cruz, R.P.; da Silva, F.V.; Fileti, A.M.F. Machine learning and acoustic method applied to leak detection and location in low-pressure gas pipelines. Clean Technol. Environ. Policy 2020, 22, 627–638. [Google Scholar] [CrossRef]
- Priyadarshini, A. A map reduce based support vector machine for big data classification. Int. J. Database Theory Appl. 2015, 8, 77–98. [Google Scholar] [CrossRef]
- Taunk, K.; De, S.; Verma, S.; Swetapadma, A. A brief review of nearest neighbor algorithm for learning and classification. In Proceedings of the 2019 International Conference on Intelligent Computing and Control Systems (ICCS), Madurai, India, 15–17 May 2019. [Google Scholar]
- Abu Alfeilat, H.A.; Hassanat, A.B.; Lasassmeh, O.; Tarawneh, A.S.; Alhasanat, M.B.; Eyal Salman, H.S.; Prasath, V.S. Effects of distance measure choice on k-nearest neighbor classifier performance: A review. Big Data 2019, 7, 221–248. [Google Scholar] [CrossRef] [PubMed]
- Santos-Ruiz, I.d.l.; Bermúdez, J.R.; López-Estrada, F.R.; Puig, V.; Torres, L.; Delgado-Aguiñaga, J. Online leak diagnosis in pipelines using an EKF-based and steady-state mixed approach. Control Eng. Pract. 2018, 81, 55–64. [Google Scholar] [CrossRef]
- Gu, Z.; Bai, C.; Zhang, H. Dynamic modeling of reciprocating pump valves with considering the interaction effects between pump and pipeline. Proc. Inst. Mech. Eng. Part I J. Syst. Control Eng. 2022, 236, 1491–1502. [Google Scholar] [CrossRef]
- Abbas, F.; Yan, Y.; Wang, L. Mass flow rate measurement of pneumatically conveyed solids through multimodal sensing and data-driven modeling. IEEE Trans. Instrum. Meas. 2021, 70, 1–16. [Google Scholar] [CrossRef]
- Diao, X.; Shen, G.; Jiang, J.; Chen, Q.; Wang, Z.; Ni, L.; Mebarki, A.; Dou, Z. Leak detection and location in liquid pipelines by analyzing the first transient pressure wave with unsteady friction. J. Loss Prev. Process Ind. 2019, 60, 303–310. [Google Scholar] [CrossRef]
- Marušić-Paloka, E.; Pažanin, I. Effects of boundary roughness and inertia on the fluid flow through a corrugated pipe and the formula for the Darcy–Weisbach friction coefficient. Int. J. Eng. Sci. 2020, 152, 103293. [Google Scholar] [CrossRef]
- Azizi, N.; Homayoon, R.; Hojjati, M.R. Predicting the Colebrook–White friction factor in the pipe flow by new explicit correlations. J. Fluids Eng. 2019, 141, 051201. [Google Scholar] [CrossRef]
- Arumugam, A.; Kibrom, H.; Gebreamlak, M.; Teame, M.; Mengstu, M. Modeling of Pipe Diameter Using Velocity Method for Pressurized Flow Pipe Network at Hamelmalo Agricultural College—A Case Study. Ann. Fac. Eng. Hunedoara 2020, 18, 85–92. [Google Scholar]
- Zhang, Z. Hydraulic Transients and Computations; Springer: Berlin/Heidelberg, Germany, 2020. [Google Scholar]
- Yin, X.; Wen, K.; Huang, W.; Luo, Y.; Ding, Y.; Gong, J.; Gao, J.; Hong, B. A high-accuracy online transient simulation framework of natural gas pipeline network by integrating physics-based and data-driven methods. Appl. Energy 2023, 333, 120615. [Google Scholar] [CrossRef]
- Malekpour, A.; She, Y. Real-time leak detection in oil pipelines using an Inverse Transient Analysis model. J. Loss Prev. Process Ind. 2021, 70, 104411. [Google Scholar] [CrossRef]
- Besançon, G. Observer tools for pipeline monitoring. In Modeling and Monitoring of Pipelines and Networks; Springer: Berlin/Heidelberg, Germany, 2017; pp. 83–97. [Google Scholar]
- Delgado-Aguiñaga, J.A.; Begovich, O. Water leak diagnosis in pressurized pipelines: A real case study. In Modeling and Monitoring of Pipelines and Networks; Springer: Berlin/Heidelberg, Germany, 2017; pp. 235–262. [Google Scholar]
- Delgado-Aguiñaga, J.; Besancon, G.; Begovich, O.; Carvajal, J. Multi-leak diagnosis in pipelines based on Extended Kalman Filter. Control Eng. Pract. 2016, 49, 139–148. [Google Scholar] [CrossRef]
- Wang, X.; Ghidaoui, M.S. Identification of multiple leaks in pipeline: Linearized model, maximum likelihood, and super-resolution localization. Mech. Syst. Signal Process. 2018, 107, 529–548. [Google Scholar] [CrossRef]
- Wang, D.; Shi, S.; Lu, J.; Hu, Z.; Chen, J. Research on gas pipeline leakage model identification driven by digital twin. Syst. Sci. Control Eng. 2023, 11, 2180687. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Classifiers | Accuracy (Validation) % | Total Cost (Validation) | Prediction Speed obs/s | Training Time s |
|---|---|---|---|---|
| Fine KNN | 99.9 | 10 | 40,000 | 8.6309 |
| Weighted KNN | 99.8 | 16 | 38,000 | 10.586 |
| SVM kernel | 99.2 | 78 | 590 | 293.11 |
| Medium KNN | 99.1 | 88 | 30,000 | 11.598 |
| Cubic KNN | 99.0 | 105 | 16,000 | 9.4564 |
| Logistic regression kernel | 98.4 | 167 | 490 | 233.76 |
| Coarse KNN | 98.3 | 171 | 17,000 | 10.928 |
| Quadratic SVM | 98.1 | 195 | 2800 | 401.28 |
| Linear SVM | 95.9 | 424 | 2300 | 102.53 |
| Cosine KNN | 94.7 | 553 | 4400 | 13.619 |
| Fine Gaussian SVM | 88.4 | 1205 | 1300 | 455.64 |
| Medium Gaussian SVM | 63.2 | 3805 | 750 | 541.64 |
| Cubic SVM | 58.9 | 4251 | 4500 | 1219.6 |
| Coarse Gaussian SVM | 38.3 | 6390 | 550 | 661.47 |
| Scenario | Classifier | Accuracy (Validation) % | Total Cost (Validation) | Prediction Speed obs/s | Training Time s |
|---|---|---|---|---|---|
| Scenario 1 | Fine KNN | 99.8 | 21 | 50,000 | 3.5869 |
| Weighted KNN | 99.8 | 25 | 41,000 | 6.861 | |
| SVM Kernel | 97.4 | 267 | 1300 | 161.08 | |
| Scenario 2 | Fine KNN | 98.3 | 173 | 62,000 | 2.2025 |
| Weighted KNN | 98.4 | 164 | 51,000 | 5.2388 | |
| SVM Kernel | 94 | 625 | 1600 | 136.06 | |
| Scenario 3 | Fine KNN | 98.3 | 173 | 80,000 | 2.7874 |
| Weighted KNN | 98.3 | 175 | 64,000 | 6.9076 | |
| SVM Kernel | 35.7 | 6653 | 2400 | 88.053 |
| Scenario Description | Scenario 1 | Scenario 2 | Scenario 3 |
|---|---|---|---|
| True positive | 32 | 22.6 | 14.42 |
| False positive | 5.5 | 7.4 | 7 |
| False negative | 5.5 | 7.4 | 7 |
| True negative | 107 | 112.6 | 121.57 |
| Precision | 85% | 75% | 67% |
| Recall | 82% | 79% | 62% |
| Specificity | 95% | 93% | 94% |
| Accuracy | 85% | 75% | 67% |
| F1 score | 88% | 79% | 71% |
| Scenario Description | Scenario 1 | Scenario 2 | Scenario 3 |
|---|---|---|---|
| True positive | 22 | 23.2 | 16 |
| False positive | 3 | 6.8 | 5 |
| False negative | 3 | 6.8 | 5 |
| True negative | 122 | 113.2 | 121.32 |
| Precision | 84% | 76% | 68% |
| Recall | 82% | 80% | 63% |
| Specificity | 97% | 94% | 93% |
| Accuracy | 88% | 77% | 69% |
| F1 score | 91% | 82% | 72% |
| Methods | ||||
|---|---|---|---|---|
| Leak Location (m) | RTTM RSME | RTTM MAPE (%) | MRTTM RSME | MRTTM MAPE (%) |
| 1400 m | 14.68 | 1.03 | 3.68 | 0.22 |
| 2880 m | 53.81 | 1.86 | 5.9 | 0.16 |
| 4500 m | 22.96 | 0.51 | 3.45 | 0.07 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Tajalli, S.A.M.; Moattari, M.; Naghavi, S.V.; Salehizadeh, M.R. A Novel Hybrid Internal Pipeline Leak Detection and Location System Based on Modified Real-Time Transient Modelling. Modelling 2024, 5, 1135-1157. https://doi.org/10.3390/modelling5030059
Tajalli SAM, Moattari M, Naghavi SV, Salehizadeh MR. A Novel Hybrid Internal Pipeline Leak Detection and Location System Based on Modified Real-Time Transient Modelling. Modelling. 2024; 5(3):1135-1157. https://doi.org/10.3390/modelling5030059
Chicago/Turabian StyleTajalli, Seyed Ali Mohammad, Mazda Moattari, Seyed Vahid Naghavi, and Mohammad Reza Salehizadeh. 2024. "A Novel Hybrid Internal Pipeline Leak Detection and Location System Based on Modified Real-Time Transient Modelling" Modelling 5, no. 3: 1135-1157. https://doi.org/10.3390/modelling5030059
APA StyleTajalli, S. A. M., Moattari, M., Naghavi, S. V., & Salehizadeh, M. R. (2024). A Novel Hybrid Internal Pipeline Leak Detection and Location System Based on Modified Real-Time Transient Modelling. Modelling, 5(3), 1135-1157. https://doi.org/10.3390/modelling5030059