
Operative Unmanned Surface Vessels (USVs): A Review of Market-Ready Solutions




Abstract
:1. Introduction
2. Brief Background of USV Technology
2.1. Evolution of USVs
2.2. Regulatory Challenges
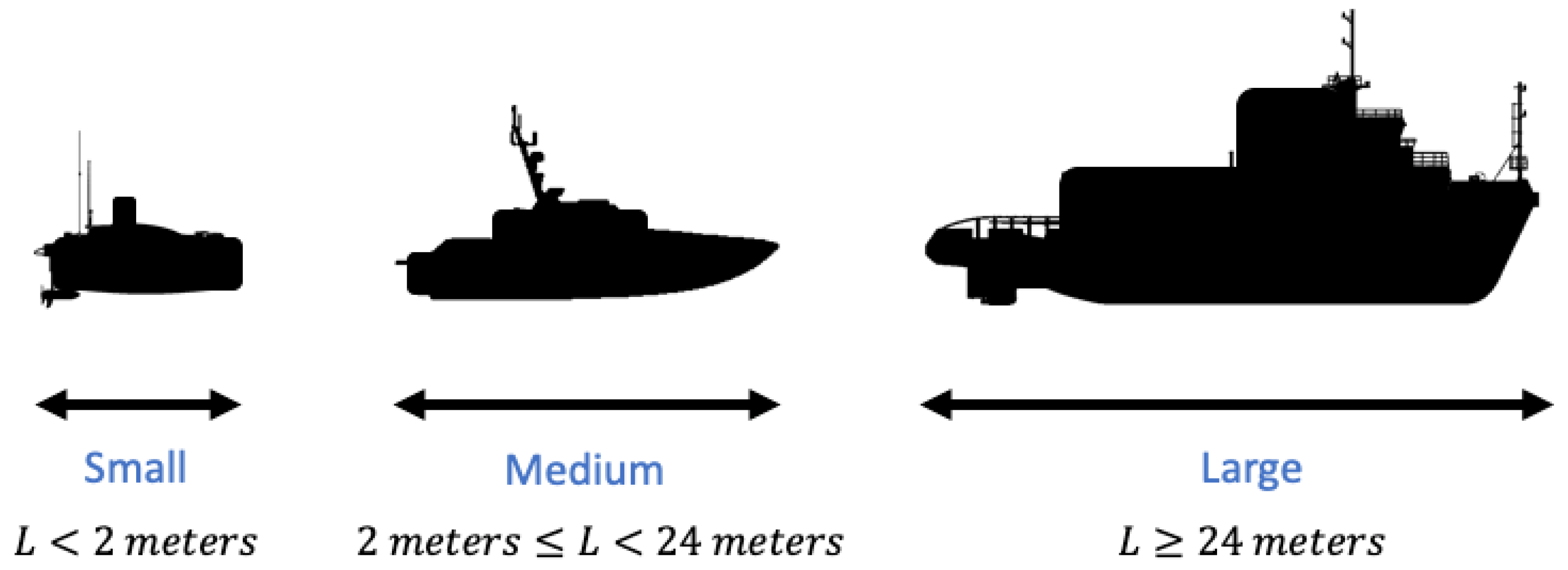
2.3. Size-Based Classification of USVs
2.4. Key Technological Components
- Communication technologies, including satellite links, 4G/5G networks, and radio frequency transmissions, enable real-time control and data transfer. These advancements ensure continuous connectivity between USVs and command centers [37].
- Sensor integration, comprising radar, LiDAR, cameras, and sonar, enhances situational awareness and autonomous navigation. Multi-sensor fusion enables USVs to create a comprehensive understanding of their surroundings, improving collision avoidance and target tracking [38,39]. The convergence of these technologies continues to push the boundaries of what USVs can achieve in various maritime sectors.

2.5. Applications of USVs
- Environmental monitoring;
- Surveillance and security;
- Scientific research;
- Asset inspection;
- Military and defense;
- Communication and navigation;
- Survey and mapping;
- Disaster response;
- Logistics and support;
- Energy and offshore.
3. Trends in Operational USVs
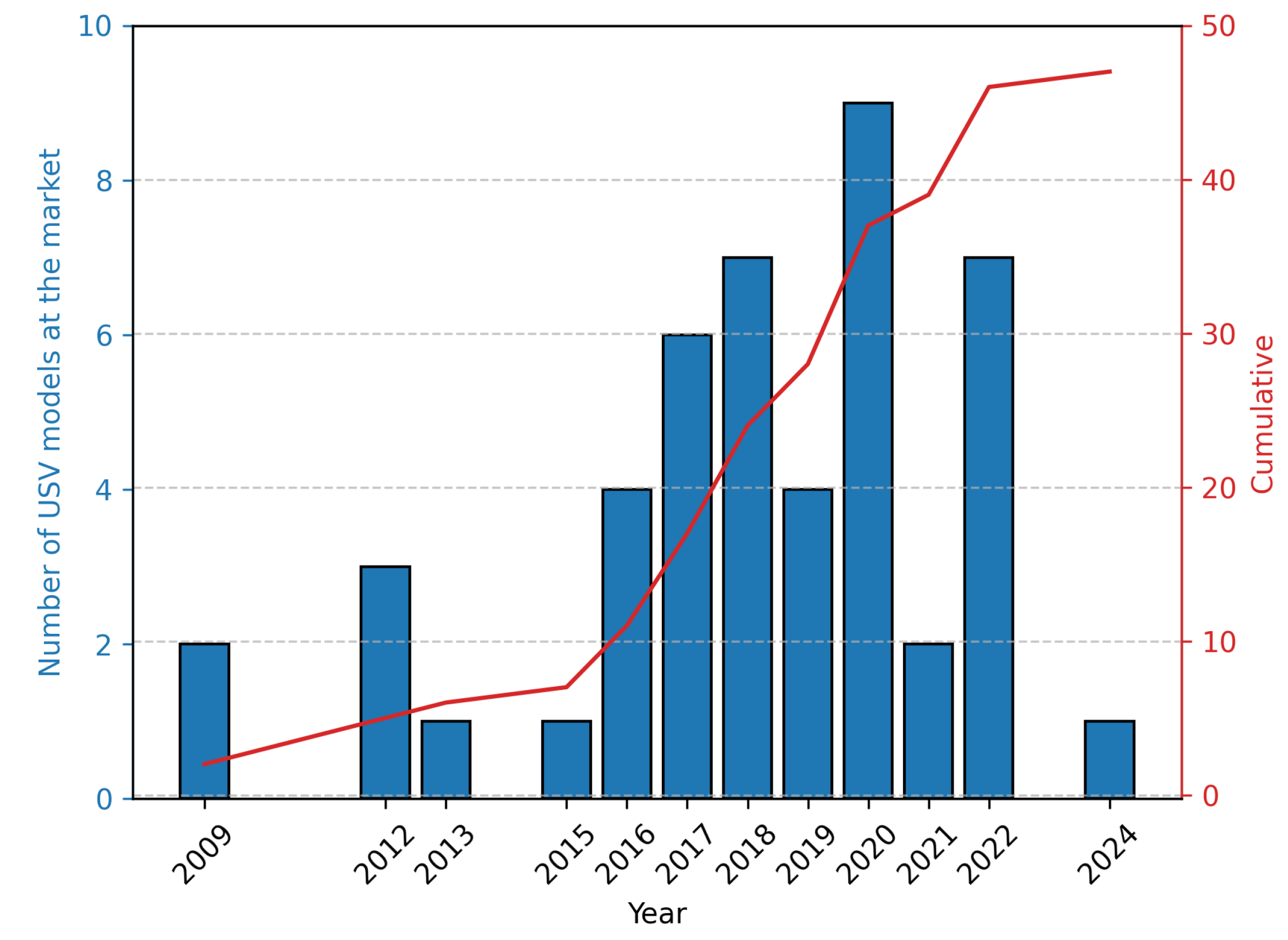
3.1. Models Introduced to the Market
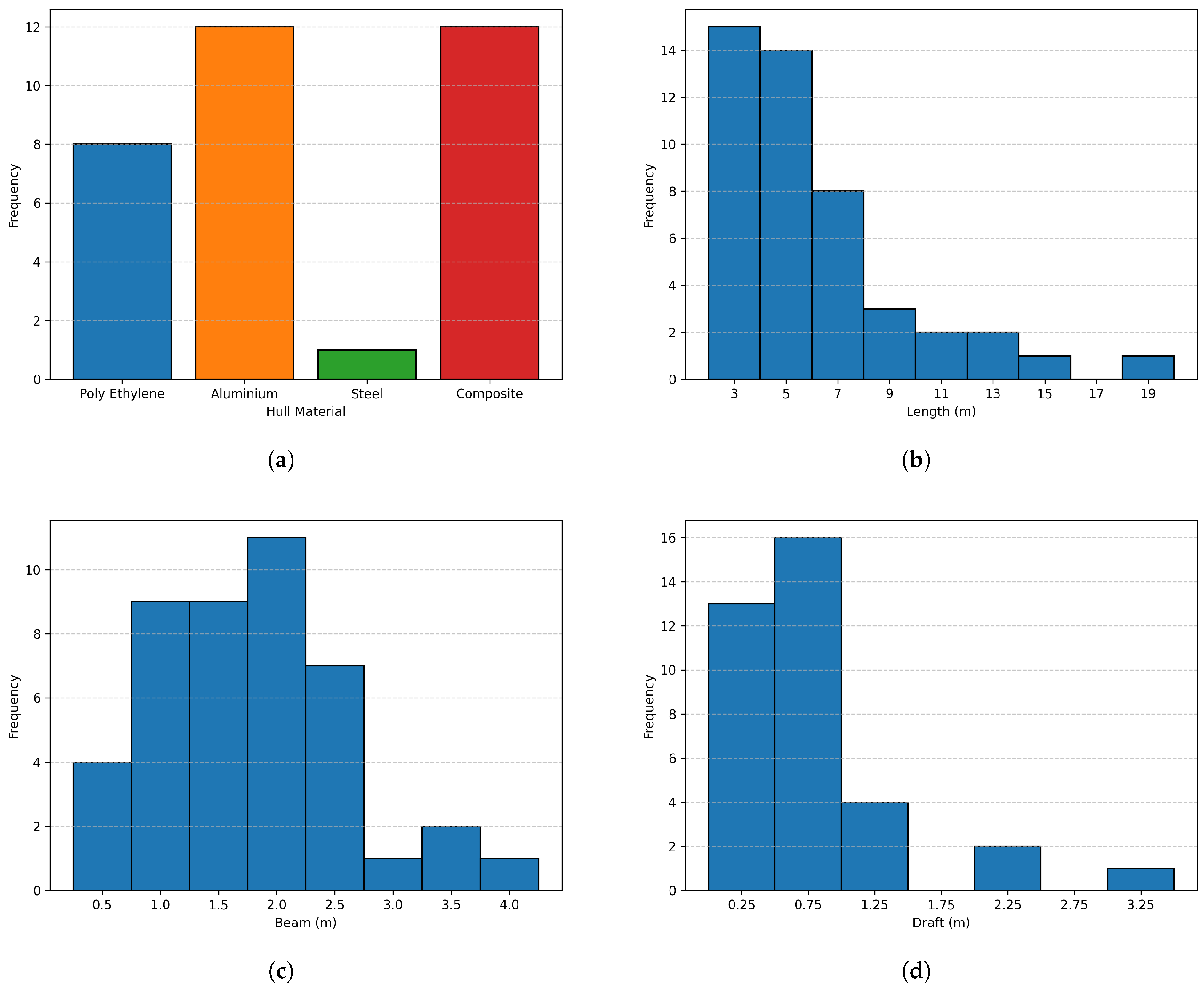
3.2. Hull Materials and Main Dimensions
3.3. Dry Weight and Payloads
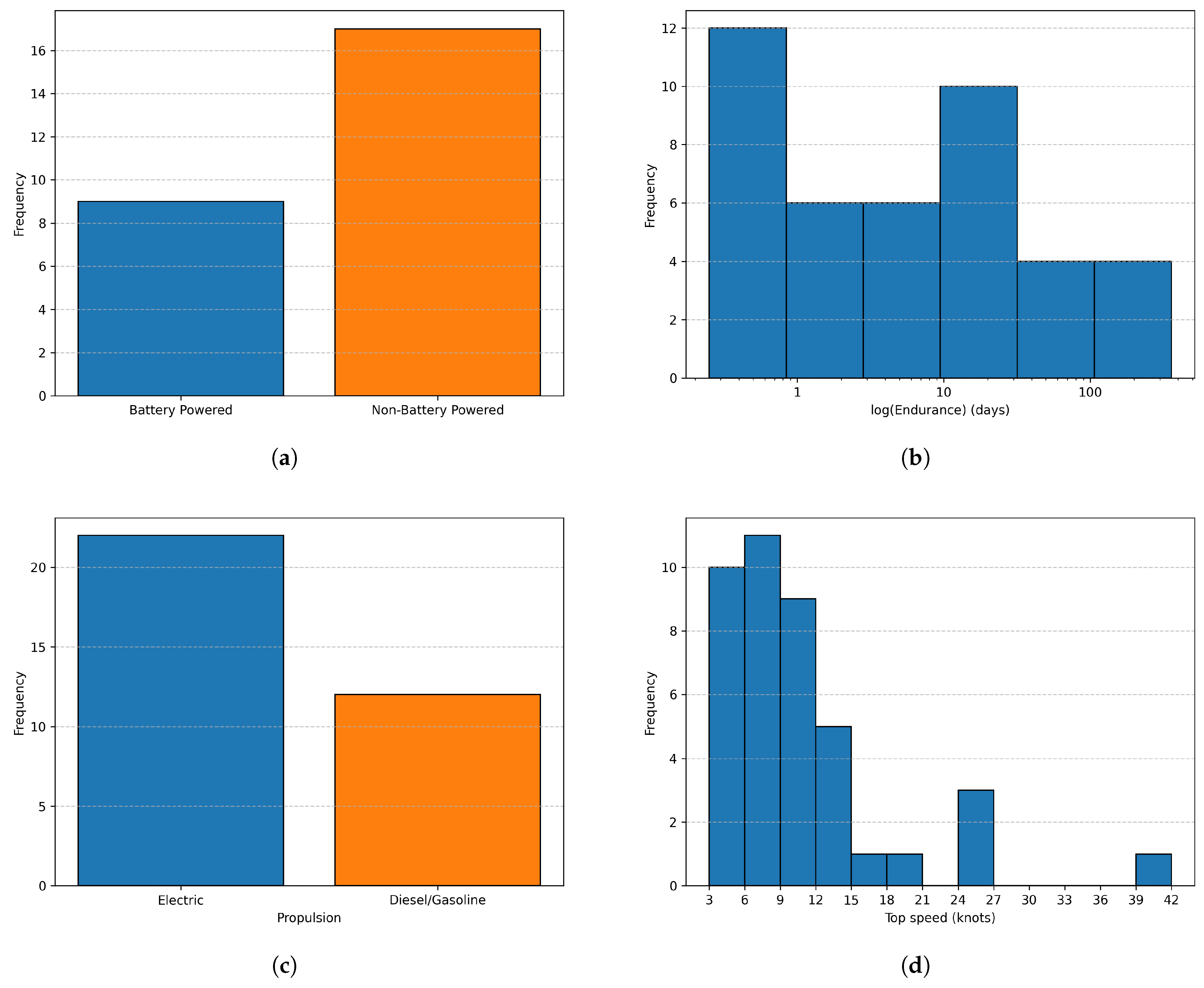
3.4. Power Sources, Endurance, Propulsion, and Top Speeds
3.5. Communication Technologies
3.6. Sensors and Situation Awareness Technologies
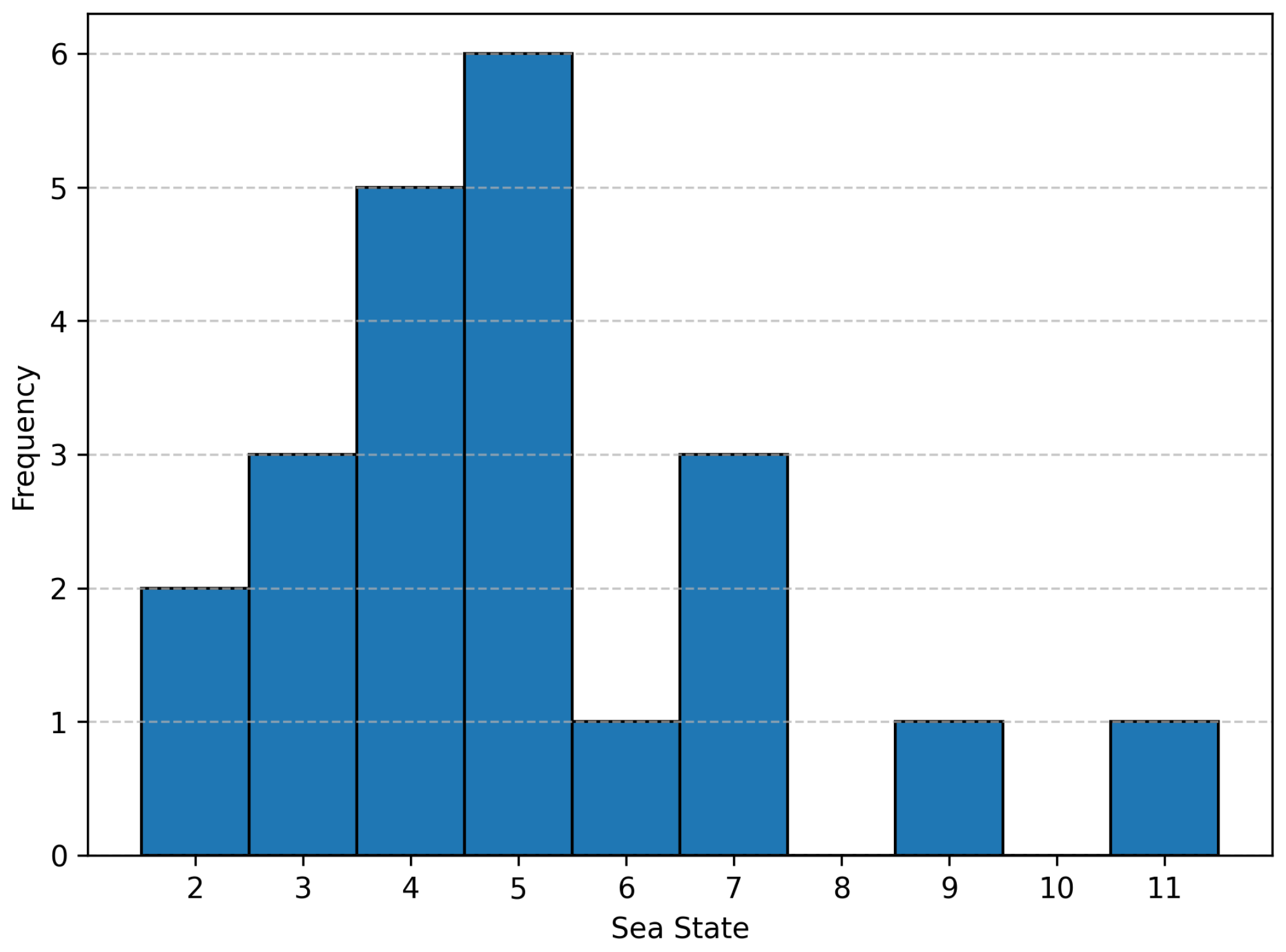
3.7. Sea States
3.8. Key Findings
3.9. Future Trajectory of USVs
- Considering the autonomy found in most (market-ready) USVs and the recent strides in artificial intelligence, a significant gap remains between the state-of-the-art research and most operative USVs, which still rely on conventional control modes.
- Another important gap lies in the hardware and software architectures of these USVs. Due to limited publicly available information, it is challenging to assess the advantages and disadvantages of different USV models.
- Despite various developments of collision avoidance algorithms that comply with the Convention on the International Regulations for Preventing Collisions at Sea (COLREGS), most manufacturers do not disclose details regarding their implementation.
- Autonomous navigation is an important feature in most USVs, yet it is generally limited to basic modes, such as waypoint navigation. However, more advanced capabilities like autonomous berthing are rarely mentioned by manufacturers, reinforcing the gap highlighted in point 1.
- Another critical aspect is the extrapolation of features across different USV scales. Thus, some topics arise, for instance, (1) the control used in small vessels, (2) legal requirements, and (3) cybersecurity risks. With those, some questions also arise due to differences in equipment and operational contexts: “how would these features be translated from small to large USVs? Will there be any kind of equivalence between them?”.
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Abbreviations
| USV | Unmanned Surface Vessel |
| ROV | Remotely Operated Vehicle |
| UUV | Unmanned Underwater Vehicle |
| UXO | Unexploded Ordnance |
| CPT | Cone Penetration Testing |
| UAV | Unmanned Aerial Vehicle |
| IUU | Illegal, Unreported, and Unregulated |
| SOLAS | Safety of Life at Sea |
| USBL | Ultra-Short Baseline |
| PAM | Passive Acoustic Monitoring |
| MDA | Maritime Domain Awareness |
| ISR | Intelligence, Surveillance, and Reconnaissance |
| HDPE | High-Density Polyethylene |
| GRP | Glass-Reinforced Plastic |
| LLDPE | Linear Low-Density polyethylene |
| SS | Sea state |
Appendix A. Summary Tables

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| USV | Manufacturer | Release Year | Applications |
|---|---|---|---|
| Otter [51] | Maritime Robotics | 2016 | Data acquisition; environmental monitoring; surveillance. |
| Mariner [83] | Maritime Robotics | 2009 | Ocean mapping and exploration; maritime surveillance and security; offshore support. |
| Mariner X [82] | Maritime Robotics | 2022 | Offshore monitoring and surveying; support vessel; surveillance. |
| Armada 8 (A8) [55] | Ocean Infinity | 2017 | Surveying; environmental research; seismic support; security. |
| Armada 78 (A78) [31] | Ocean Infinity | 2022 | Geophysical survey; geotechnical sampling; inspection; maintenance; repair services; support operations of ROVs, seabed drills and CPT systems. |
| SEA-KIT X [60] | SEA-KIT | 2017 | Deep-water bathymetry; offshore and subsea asset inspection; hydrographic survey. |
| Tupan [52] | Tidewise | 2020 | Marine site characterization; asset inspection; logistics; smart data; defense; surveillance. |
| Shadow Fox [65] | L3Harris | 2018 | MDA; ISR; anti-submarine warfare; area protection; force protection; surface warfare; communications relay; combat search and rescue; chokepoint monitoring; amphibious precursor and support operations; UAV forward operations; insertion operations support; maritime mine countermeasures force protection; swarm attack protection; battle damage assessment. |
| C-Cat 3 [67] | L3Harris | 2017 | Hydrographic survey; above-water mapping; UUV location and tracking; acoustic communication. |
| C-Worker 4 [84] | L3Harris | 2015 | Hydrographic survey; port and harbor surveillance; environmental monitoring. |
| C-Worker 5 [85] | L3Harris | 2016 | Hydrographic survey; port and harbor surveillance; environmental monitoring. |
| C-Worker 7 [86] | L3Harris | 2016 | Inspection and positioning applications; ROV deployment and recovery; multibeam survey; subsea positioning. |
| DriX H-8 [63] | Exail | 2017 | Advanced scientific and hydrographic surveys; geophysical and UXO surveys; subsea infrastructures’ inspection; surveys with multiple robots. |
| DriX H-9 [63] | Exail | 2022 | Advanced scientific and hydrographic surveys; geophysical and UXO surveys; subsea infrastructures’ inspection; surveys with multiple robots. |
| DriX O-16 [63] | Exail | 2024 | Advanced scientific and hydrographic surveys; geophysical and UXO surveys; subsea infrastructures’ inspection; surveys with multiple robots. |
| Inspector 125 [87] | Exail | 2019 | Coastal and harbor protection; mine countermeasures; rapid environment assessment. |
| Surveyor [58] | Saildrone | 2021 | IUU fishing; pattern-of-life monitoring; law enforcement and maritime safety; SOLAS missions; countersmuggling; border patrol; harbor security; guard vessel roles; sanction monitoring; range clearing; acoustic/SIGINT baselining; ecosystem monitoring; ocean mapping; seafloor classification; nautical chart validation; arctic and remote area exploration. |
| Voyager [58] | Saildrone | 2022 | High-resolution feature mapping; seafloor classification; nautical chart validation; arctic and remote area exploration; IUU fishing; pattern-of-life monitoring; law enforcement and maritime safety; countersmuggling; border patrol; harbor security; guard vessel roles; sanction monitoring; range clearing; acoustic/SIGINT baselining; ecosystem monitoring. |
| Explorer [58] | Saildrone | 2016 | Metocean data; ecosystem monitoring; fisheries data carbon monitoring; satellite calibration and validation. |
| Sailbuoy [47] | Offshore Sensing | 2012 | Collecting environmental data; measuring meteorological parameters; advanced data communication. |
| XO-450 [88] | XOcean | 2018 | Bathymetric survey; data harvesting; metocean data; fisheries; environmental monitoring. |
| Sounder [70] | Kongsberg | 2019 | USBL positioning; multibeam echo sounder; scientific and research; fishery. |
| Wave Glider [71] | Liquid Robotics | 2009 | Anti-submarine warfare; communications gateway; anti-surface warfare; ISR; meteorological and oceanography; tsunami and seismic monitoring; fish and marine mammal monitoring; hydrocarbon monitoring; metocean. |
| SP-48 [89] | SeaTrac | 2020 | Hydrography; communications gateway; data harvesting; environmental monitoring; mobile subsea positioning; MDA; metocean and oceanographic data collection. |
| L25 [90] | OceanAlpha | 2022 | Underwater inspection; hydrography survey; oceanography survey. |
| ME120 [91] | OceanAlpha | 2018 | Hydrographic survey; underwater inspection in lakes, rivers, harbors, construction sites, nearshore. |
| M40P [92] | OceanAlpha | 2020 | Hydrographic survey; site and route survey; construction inspection; seabed exploration. |
| M80 [93] | OceanAlpha | 2017 | Bathymetric survey; hazard location; hydrographic mapping; oceanographic measurements; pipeline survey; security patrol; underwater searches; water quality monitoring. |
| M75 [94] | OceanAlpha | 2018 | Patrol and guard; tracking and warning; underwater object detect. |
| Uni-Pact [95] | Unique Group | 2020 | Hydrographic survey; coastal and harbor monitoring; habitat mapping; seabed mapping and classification; data harvesting; survey of reservoirs. |
| Uni-Max [96] | Unique Group | 2019 | Search and recovery; hydrographic survey; inspection survey; oceanography and monitoring. |
| HydroCat-550 [97] | Seafloor Systems | 2020 | Inspection; survey of lakes, harbors, large rivers; water quality research. |
| EchoBoat-240 [98] | Seafloor Systems | 2020 | Inspection; survey of mines, sewage treatment plants, lakes, harbors, rivers. |
| AutoNaut 3.5 [99] | AutoNaut | 2012 | Data collection; research; monitoring in challenging marine environments; survey; surveillance; anti-submarine warfare; PAM; ocean science; metocean. |
| AutoNaut 5.0 [99] | AutoNaut | 2012 | Data collection; research; monitoring in challenging marine environments; survey; surveillance; anti-submarine warfare; PAM; ocean science; metocean. |
| Lightfish [100] | Seasats | 2020 | Bathymetric surveying; water sampling; perimeter security; wildlife monitoring; MDA; ISR; UUV/UAV teaming. |
| Mero [101] | USSV | 2022 | Single- and multi-beam bathymetry; physical water collection; oil leak detection; visual inspection of assets; cargo transportation; surveillance. |
| C-400 [102] | USSV | 2017 | Collection of meteorological, oceanographic or river surveys; study of aquatic life. |
| WAM-V 8 [73] | Ocean Power Technologies | 2019 | Marine survey; oceanography; marine protected area monitoring and enforcement; port surveillance and security; UAV and UUV deployment; nodal communications; oil and gas operations |
| WAM-V 16 [73] | Ocean Power Technologies | 2013 | Benthic operations survey; oceanography; marine protected area monitoring and enforcement; port surveillance and security; UAV and UUV deployment; nodal communications; oil and gas operations. |
| WAM-V 22 [73] | Ocean Power Technologies | 2021 | Benthic operations survey; oceanography; marine protected area monitoring and enforcement; port surveillance and security; UAV and UUV deployment; nodal communications; oil and gas operations. |
| SR Utility 2.5 [44] | SeaRobotics | 2018 | Disaster response; bathymetric research; water quality studies; stream gauging; winch deployment; habitat mapping; infrastructure survey. |
| SR Utility 3.0 [44] | SeaRobotics | 2020 | Disaster response; bathymetric research; water quality studies; stream gauging; winch deployment; habitat mapping; infrastructure survey. |
| SR Utility 3.6 [44] | SeaRobotics | 2018 | Disaster response; bathymetric research; water quality studies; stream gauging; winch deployment; habitat mapping; infrastructure survey. |
| SR Endurance 7.0 [44] | SeaRobotics | 2018 | Disaster response; bathymetric research; water quality studies; stream gauging; winch deployment; habitat mapping; infrastructure survey. |
| SR Endurance 8.0 [44] | SeaRobotics | 2022 | Offshore inspection; ocean research; ongoing marine surveillance operations. |
| DataXplorer [50] | Open Ocean Robotics | 2020 | Weather conditions; ocean currents; water depth; water temperature; MDA; asset security; illegal fishing enforcement; seafloor mapping; metocean data collection; marine mammal monitoring. |
| USV | Hull Material * | Size | Draft * | Dry Weight * | Payload Capacity * | Moonpool * |
|---|---|---|---|---|---|---|
| Otter | High-Density Polyethylene (HDPE) | 2.00 m × 1.08 m × 1.06 m | 0.32 m | 62 kg | 30 kg | |
| Mariner | High-Density Polyethylene (HDPE) | 5.98 m × 2.06 m × 2.70 m | 0.50 m | 2000 kg | 400 kg | 1 (optional) |
| Mariner X | High-Density Polyethylene (HDPE) | 9.00 m × 2.50 m × 3.00 m | 0.60 m | 5000 kg | 1200 kg | 2 |
| Armada 8 (A8) | Aluminum | 7.61 m × 2.14 m | 0.99 m | 3700 kg | 1100 kg | 1 (0.85 m × 0.75 m) |
| Armada 78 (A78) | Steel | 78.00 m × 15.00 m | 5.00 m | 2,500,000 kg | 1,050,000 kg | 2 (9 m × 4 m) |
| SEA-KIT X | Aluminum | 11.75 m × 2.20 m × 8.45 m | 0.72 m | 2000 kg | ||
| Tupan | Aluminum | 4.92 m × 1.78 m × 3.34 m | 0.6 m | 200 kg | 1 | |
| Shadow Fox | 12.70 m × 3.50 m × 6.00 m | 0.7 m | 940 kg | |||
| C-Cat 3 | Polyethylene | 3.00 m × 1.60 m × 2.30 m | 0.4 m | 320 kg | 70 kg | |
| C-Worker 4 | Aluminum | 4.20 m × 1.60 m × 2.70 m | 0.6 m | 940 kg | 40 kg | |
| C-Worker 5 | Aluminum | 5.50 m × 1.80 m × 3.20 m | 0.85 m | 1250 kg | 40 kg | |
| C-Worker 7 | Aluminum | 7.5 m × 2.30 m × 6.40 m | 1.0 m | 3930 kg | 500 kg | 1 (2.5 m × 1.0 m × 1.5 m) |
| DriX H-8 | Composite construction (vacuum infusion) and Kevlar reinforced | 7.71 m × 0.82 m | 1600 kg | |||
| DriX H-9 | Composite construction (vacuum infusion) and Kevlar reinforced | 9.00 m | 2100 kg | |||
| DriX O-16 | Composite construction (vacuum infusion) and Kevlar reinforced | 15.75 m | 10,500 kg | 1000 kg | ||
| Inspector 125 | Composite Glass-Reinforced Plastic (GRP) | 12.33 m × 4.20 m × 5.25 m | 0.7 m | 13,355 kg | 2500 kg | |
| Surveyor | 20.00 m × 2.00 m | 3.0 m | ||||
| Voyager | 10.00 m × 1.80 m | 2.0 m | ||||
| Explorer | 7.00 m × 0.70 m | 2.0 m | 700 kg | |||
| Sailbuoy | 2.00 m × 0.52 m × 1.13 m | 0.57 m | 45 kg | 15 kg | ||
| XO-450 | Composite | 4.50 m × 2.20 m × 2.20 m | 750 kg | 100 kg | ||
| Sounder | 7.99 m × 2.14 m × 4.59 m | 0.7 m | 4000 kg | 1 | ||
| Wave Glider | 3.05 m × 0.81 m × 8.0 m | 8.0 m | 90 kg | 18 kg | ||
| SP-48 | 4.80 m × 1.39 m | 0.42 m | 275 kg | 70 kg | 1 | |
| L25 | Aluminum | 7.50 m × 2.80 m × 3.00 m | 0.4 m | 2400 kg | 200 kg | |
| ME120 | Composite carbon fiber | 2.50 m × 1.40 m × 0.75 m | 0.45 m | 150 kg | 45 kg | |
| M40P | Aluminum | 4.50 m × 2.33 m × 1.90 m | 0.4 m | 1400 kg | 80 kg | |
| M80 | Aluminum | 5.65 m × 2.40 m × 2.90 m | 0.45 m | 1600 kg | 200 kg | |
| M75 | Composite carbon fiber | 5.30 m × 1.72 m × 2.85 m | 0.42 m | 1350 kg | 50 kg | |
| Uni-Pact | Polyethylene | 3.00 m × 1.60 m | 0.45 m | 412 kg | ||
| Uni-Max | Linear Low-Density Polyethylene (LLDPE) | 5.00 m × 2.20 m | 1.0 m | 1200 kg | ||
| HydroCat-550 | Aluminum | 5.50 m × 2.50 m × 2.30 m | 362 kg | 362 kg | ||
| EchoBoat-240 | UV-resistant High-Density Polyethylene (HDPE) | 2.40 m × 0.90 m | 158 kg | 90 kg | ||
| AutoNaut 3.5 | Composite glass–epoxy resin infusion | 3.50 m × 0.70 m | 0.6 m | 180 kg | 40 kg | |
| AutoNaut 5.0 | Composite glass–epoxy resin infusion | 5.00 m × 0.80 m | 0.8 m | 280 kg | 130 kg | |
| Lightfish | Composite | 3.00 m × 1.00 m | 122 kg | 27 kg | ||
| Mero | 5.00 m × 1.70 m | 300 kg | ||||
| C-400 | Composite fiber-reinforced polymer | 3.20 m × 1.60 m | 82 kg | |||
| WAM-V 8 | 2.50 m × 1.20 m × 0.80 m | 0.1 m | 45 kg | 45 kg | ||
| WAM-V 16 | 5.00 m × 2.50 m × 1.30 m | 0.5 m | 204 kg | 113 kg | ||
| WAM-V 22 | 7.00 m × 3.66 m × 1.50 m | 0.56 m | 544 kg | 270 kg | ||
| SR Utility 2.5 | 2.48 m × 1.24 m | 0.13 m | 70 kg | 60 kg | ||
| SR Utility 3.0 | Polyethylene | 3.12 m × 1.62 m × 2.36 m | 0.44 m | 363 kg | ||
| SR Utility 3.6 | 3.60 m × 1.80 m | 0.3 m | 125 kg | 90 kg | ||
| SR Endurance 7.0 | Aluminum | 7.00 m × 2.50 m | 1.0 m | 3200 kg | ||
| SR Endurance 8.0 | Aluminum | 8.30 m × 2.60 m | 1.0 m | 3745 kg | 600 kg | 1 |
| DataXplorer | Composite fiberglass | 3.60 m × 0.90 m | 0.5 m | 140 kg | 60 kg |
| USV | Endurance * | Top Speed * | Battery Power * | Fuel Tank Capacity * | Propulsion * |
|---|---|---|---|---|---|
| Otter | 20 h (at 2 knots) | 6 kts | Yes, 4 × lithium-ion batteries | 2 × electric motors | |
| Mariner | 50 h at 4 kts | 24 kts | 200 L | Hamilton Jet with 196 HP Yanmar diesel engine and a bow thruster for slow speed navigation | |
| Mariner X | 25 days | 12 kts | 2000 L | Hamilton Jet HJX29 and Yanmar 4LV230 with redundant twin electric pods and a bow thruster for slow speed navigation | |
| Armada 8 (A8) | 7 days at 4 kts | 7 kts | |||
| Armada 78 (A78) | 35 days | ||||
| SEA-KIT X | 14 days | 6 kts | Yes | 2000 L | 2 × 10 kW/1200 rpm electric directional thrusters; 1 × 12 kW/2000 rpm Azipod thruster |
| Tupan | 11 days | 6.5 kts | Electric, two propellers 4.5 kW each | ||
| Shadow Fox | 40 kts | 1500 L | 2 × Cummins QSB, 6.7 inboard engines (550 HP each) with Hamilton 292 waterjets | ||
| C-Cat 3 | 8 h | 10 kts | Yes | 2 × 24V DC electric motors driving 3-bladed propellers | |
| C-Worker 4 | 48 h at 3.5 kts | 6 kts | 110 L | 30 HP inboard diesel engine driving a waterjet | |
| C-Worker 5 | 4 days at 7 kts | 10 kts | 770 L | 57 HP inboard diesel engine and sail drive | |
| C-Worker 7 | 25 days at 2 kts | 6 kts | 1170 L | 2 × 20 kW Aziprops driving 4-bladed Kaplan propellers | |
| DriX H-8 | 10 days | 14 kts | 250 L | 37.5 HP diesel engine | |
| DriX H-9 | 20 days | 13 kts | 550 L | ||
| DriX O-16 | 30 days | 16 kts | 2300 L | Hybrid propulsion with one electric pod that can rotate 360° | |
| Inspector 125 | 40 h | 25 kts | Engines: Cummins QCB 8.3; engines’ power: 2 × 442 kW; waterjets: MJP X310. | ||
| Surveyor | 17 days under power, 3+ months under sail | Wind (Saildrone wing); auxiliary: 78 HP high-efficiency diesel. | |||
| Voyager | 3+ months under sail | Wind (Saildrone wing); auxiliary: 4 kW electric motor. | |||
| Explorer | 12+ months | Wind (Saildrone wing) | |||
| Sailbuoy | 12 months | 4 kts | Wind | ||
| XO-450 | 18 days | 4 kts | Twin electric thrusters + bow thrusters | ||
| Sounder | 20 days at 4 kts | 13 kts | 400 L | 125 HP Steyr diesel engine with fixed pitch propeller | |
| Wave Glider | 12 months | Yes, 0.9–6.8 kWh rechargeable | Mechanical conversion of wave energy into forward propulsion | ||
| SP-48 | Months | 5 kts | Yes, 6.75 kWh (Lithium) | 1000 W brushless Motor | |
| L25 | 65 h at 4 kts | 10 kts | 350 L | Propeller × 2 + outboard diesel engine 50 HP × 2 | |
| ME120 | 8 h at 4 kts | 10 kts | Duct-type thruster | ||
| M40P | 100 h at 4 kts | 7 kts | 100 L | Electric propulsion with differential steering | |
| M80 | 50 h at 6 kts | 10 kts | Diesel engine with waterjet thrusters (electric motor) | ||
| M75 | 6 h at 20 kts | 26 kts | 120 L | Diesel engine YANMAR 110 HP + Alamarin waterjet 260 HP | |
| Uni-Pact | 8 h | 5 kts | Yes, 1 × 13.25 V/180Ah Li-ion battery; | 1 × 24 VDC electric engines (Torqeedo Cruise 2.0RS) | |
| Uni-Max | 96 h under battery and 5 to 6 days under diesel generator | 5 kts | 2 × Torqeedo Cruise 6.0RS with diesel-powered generator (hybrid) | ||
| HydroCat-550 | 8 h | 12 kts | 2 × 25 HP equivalent Torqueedo motors with electric tilt/trim | ||
| EchoBoat-240 | 8 h at 2 kts | 4 kts | Yes | 2 × brushless DC outdrive | |
| AutoNaut 3.5 | 3 kts | Wave foil technology. Wave/electric hybrid options. | |||
| AutoNaut 5.0 | 3 kts | Wave foil technology. Wave/electric hybrid options. | |||
| Lightfish | 6 months | 4.5 kts | Electric | ||
| Mero | 60 h | 50 L | 2 × 2 kW electric motors | ||
| C-400 | 10 h under battery | 3 kts | Yes | ||
| WAM-V 8 | 10 h at 3 kts | 6 kts | 2 × 400 W electric; 4 × 400 W electric; 2 × 1100 W electric. | ||
| WAM-V 16 | 15 h at 5 kts | 11 kts | 2 × 2 kW electric | ||
| WAM-V 22 | 72 h at 8 kts | 20 kts | 151 L | 2× 20 HP gasoline; 2× 30 HP gasoline | |
| SR Utility 2.5 | 11 h at 3.0 kts; 6.5 h at 4.0 kts; 20 h at 3.0 kts; 12.5 h at 4.0 kts; | 7.5 kts | Electric | ||
| SR Utility 3.0 | 20 h at 2 kts; 10 h at 3 kts; 6 h at 4 kts; | 6 kts | 2 × Torqeedo Cruise 2.0R electric thrusters | ||
| SR Utility 3.6 | 11 kts | Electric | |||
| SR Endurance 7.0 | 3 days at 5 kts; 6 days at 4 kts; | 10 kts | Diesel; electric; diesel–electric hybrid. | ||
| SR Endurance 8.0 | 9 days at 5 kts | 10 kts | 760 L | 55 kW continuous | |
| DataXplorer | 6 kts | Yes, 17.5 kWh battery and 300 W solar panel | 3 HP equivalent motor |
| USV | Sea State | Communication | Situational Awareness |
|---|---|---|---|
| Otter | 2 | MIMO radio, Wi-Fi, 4G | Camera, AIS Class B |
| Mariner | 4 for survey, 6 for transit, 7 for survival <E (4G) | Camera, AIS class B, radar | |
| Mariner X | 4 for survey, 6 for transit, 7 for survival <E (4G) | Camera, AIS class B, radar | |
| Armada 8 (A8) | Iridium, RF radios, VHF | ||
| Armada 78 (A78) | VHF, point-to-point, point-to-multipoint radio, satellite communications, 4G, LTE | ||
| SEA-KIT X | 7 | VHF, DSC, Wi-Fi, radio, satellite, Iridium, Inmarsat | |
| Tupan | 5 | Wi-Fi, 5G, COFDM and satellite | |
| Shadow Fox | IP mesh radio, UHF, VHF, satellite, 4G, Wi-Fi | ||
| C-Cat 3 | 2 | 100 mW COFDM IP mesh radio; tuneable RF channel bandwidths of 1.25 MHz to 10 MHz; 4G; Wi-Fi | 360-degree camera |
| C-Worker 4 | 4 for operations, 5 for survival | 5 W COFDM IP mesh radio, tuneable RF channel bandwidths of 1.25 MHz to 10 MHz, 4G, Wi-Fi | 360-degree camera and one forward-facing thermal (IR) camera |
| C-Worker 5 | 3 | 5 W COFDM IP mesh radio, tuneable RF channel bandwidths of 1.25 MHz to 10 MHz, 4G, Wi-Fi | 360-degree camera and one forward-facing thermal (IR) camera |
| C-Worker 7 | 4 for operations, 5 for survival | 5 W COFDM IP mesh radio, tuneable RF channel bandwidths of 1.25 MHz to 10 MHz, 4G, Wi-Fi | 360-degree camera and six thermal (IR) cameras |
| DriX H-8 | 5 | Wi-Fi, 4G, satellite communication, UHF radio | Video and IR cameras, LiDAR, radar |
| DriX H-9 | 5 | Wi-Fi, 4G, satellite communication, UHF radio | Video and IR cameras, LiDAR, radar |
| DriX O-16 | Wi-Fi, 4G, satellite communication, UHF radio | Video and IR cameras, LiDAR, radar | |
| Inspector 125 | 4 unmanned; 5 manned; 4 LARS deployment; | ||
| Surveyor | Starlink, Iridium | Radar, cameras | |
| Voyager | Starlink, Iridium | Radar, cameras | |
| Explorer | Iridium | ||
| Sailbuoy | Iridium, GSM, VHF | ||
| XO-450 | Satellite communication | AIS, thermal imaging camera, visible light cameras, image detection | |
| Sounder | 4G, Starlink, MBR, Iridium | PTZ camera, main camera, radar, AIS, sensor fusion | |
| Wave Glider | 4 | Cell, satellite, Wi-Fi, line-of-sight radio | AIS |
| SP-48 | 7 function, 11 survive | Satellite, cellular, radio, Wi-Fi | AIS, visible running lights, 360-degree camera system |
| L25 | 3 for operations, 4 for survival | Radio, satellite | Radar, 4 × HD camera, AIS |
| ME120 | Millimeter-wave radar | ||
| M40P | 3 for operations, 4 for survival | Radar, 4 × 720P HD camera, AIS | |
| M80 | 3 | Wi-Fi, 4G LTE | Millimeter-wave radar |
| M75 | 3 for operations, 4 for survival | Navigation radar, LiDAR, AIS, camera | |
| Uni-Pact | 4G, Wi-Fi, mesh radio | ||
| Uni-Max | 4G, uni-mesh radio, remote redundancy frequency controller | Radar | |
| HydroCat-550 | 5 | Wi-fi | LiDAR, camera |
| EchoBoat-240 | UHF telemetry | ||
| AutoNaut 3.5 | Satellite | AIS | |
| AutoNaut 5.0 | Satellite | AIS | |
| Lightfish | 6 | ||
| Mero | |||
| C-400 | |||
| WAM-V 8 | Short-range radio, encrypted wireless network | 180° FOV camera | |
| WAM-V 16 | Short-range radio, encrypted wireless network | 180° FOV camera | |
| WAM-V 22 | Short-range radio, encrypted wireless network | 180° FOV camera | |
| SR Utility 2.5 | 3 | BLOS options cellular, satellite, RF | |
| SR Utility 3.0 | |||
| SR Utility 3.6 | BLOS options cellular, satellite, RF | ||
| SR Endurance 7.0 | Wi-Fi, cellular, satellite | ||
| SR Endurance 8.0 | 7 for operations, 9 for survival | Wi-Fi, RC transmitter, UHF | 360-degree field-of-view cameras |
| DataXplorer | 3G, 4G, LTE cellular, satellite, radio | 360-degree camera, AIS |
References
- Yang, P.; Xue, J.; Hu, H. A Bibliometric Analysis and Overall Review of the New Technology and Development of Unmanned Surface Vessels. J. Mar. Sci. Eng. 2024, 12, 146. [Google Scholar] [CrossRef]
- Gao, K.; Gao, M.; Zhou, M.; Ma, Z. Artificial intelligence algorithms in unmanned surface vessel task assignment and path planning: A survey. Swarm Evol. Comput. 2024, 86, 101505. [Google Scholar] [CrossRef]
- Bai, X.; Li, B.; Xu, X.; Xiao, Y. A Review of Current Research and Advances in Unmanned Surface Vehicles. J. Mar. Sci. Appl. 2022, 21, 47–58. [Google Scholar] [CrossRef]
- Patterson, R.G.; Lawson, E.; Udyawer, V.; Brassington, G.B.; Groom, R.A.; Campbell, H.A. Uncrewed Surface Vessel Technological Diffusion Depends on Cross-Sectoral Investment in Open-Ocean Archetypes: A Systematic Review of USV Applications and Drivers. Front. Mar. Sci. 2022, 8, 736984. [Google Scholar] [CrossRef]
- Bian, L.; Che, X.; Chengyang, L.; Jiageng, D.; Hui, H. Parameter optimization of unmanned surface vessel propulsion motor based on BAS-PSO. Int. J. Adv. Robot. Syst. 2022, 19, 172988142110406. [Google Scholar] [CrossRef]
- Camp, D.V.; Vey, N.L.; Kylander, P.W.; Auld, S.G.; Willis, J.J.; Lussier, J.F.; Eldred, R.A.; Van Bossuyt, D.L. Electrical Energy Storage Strategy to Support Electrification of the Fleet; Naval Postgraduate School: Monterey, CA, USA, 2022; Available online: https://apps.dtic.mil/sti/citations/trecms/AD1202053 (accessed on 13 January 2025).
- Castano-Londono, L.; Marrugo Llorente, S.d.P.; Paipa-Sanabria, E.; Orozco-Lopez, M.B.; Fuentes Montaña, D.I.; Gonzalez Montoya, D. Evolution of Algorithms and Applications for Unmanned Surface Vehicles in the Context of Small Craft: A Systematic Review. Appl. Sci. 2024, 14, 9693. [Google Scholar] [CrossRef]
- Zhang, J.; Cui, Y.; Fan, X.; Ren, J. Asynchronous Multithreading Reinforcement Control Decision Method for Unmanned Surface Vessel. IEEE Internet Things J. 2023, 10, 22806–22822. [Google Scholar] [CrossRef]
- Campbell, S.; Naeem, W.; Irwin, G. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annu. Rev. Control 2012, 36, 267–283. [Google Scholar] [CrossRef]
- Zemlianko, H.; Kharchenko, V. Ensuring Cybersecurity of the Cyber Physical System of Combined Fleets of Unmanned Aerial, Ground and Sea Vehicles. In Integrated Computer Technologies in Mechanical Engineering—2023; Springer Nature: Cham, Switzerland, 2024; pp. 392–403. [Google Scholar] [CrossRef]
- Tanakitkorn, K. A review of unmanned surface vehicle development. Marit. Technol. Res. 2019, 1, 2–8. [Google Scholar] [CrossRef]
- Liu, Z.; Zhang, Y.; Yu, X.; Yuan, C. Unmanned surface vehicles: An overview of developments and challenges. Annu. Rev. Control 2016, 41, 71–93. [Google Scholar] [CrossRef]
- Zhou, C.; Gu, S.; Wen, Y.; Du, Z.; Xiao, C.; Huang, L.; Zhu, M. The review unmanned surface vehicle path planning: Based on multi-modality constraint. Ocean Eng. 2020, 200, 107043. [Google Scholar] [CrossRef]
- Xing, B.; Yu, M.; Liu, Z.; Tan, Y.; Sun, Y.; Li, B. A Review of Path Planning for Unmanned Surface Vehicles. J. Mar. Sci. Eng. 2023, 11, 1556. [Google Scholar] [CrossRef]
- Er, M.J.; Ma, C.; Liu, T.; Gong, H. Intelligent motion control of unmanned surface vehicles: A critical review. Ocean Eng. 2023, 280, 114562. [Google Scholar] [CrossRef]
- Ghazali, M.H.M.; Satar, M.H.A.; Rahiman, W. Unmanned surface vehicles: From a hull design perspective. Ocean Eng. 2024, 312, 118977. [Google Scholar] [CrossRef]
- Wang, Y.; Shen, C.; Huang, J.; Chen, H. Model-free adaptive control for unmanned surface vessels: A literature review. Syst. Sci. Control Eng. 2024, 12, 2316170. [Google Scholar] [CrossRef]
- Heo, J.; Kim, J.; Kwon, Y. Analysis of Design Directions for Unmanned Surface Vehicles (USVs). J. Comput. Commun. 2017, 05, 92–100. [Google Scholar] [CrossRef]
- Manley, J.E. Waypoints on the Voyage to Autonomous Ships. In Proceedings of the OCEANS 2019 MTS/IEEE SEATTLE, Seattle, WA, USA, 27–31 October 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–5. [Google Scholar] [CrossRef]
- Kale, S. Developments in Unmanned Surface Vehicles (USVs): A Review. Int. Conf. Appl. Eng. Nat. Sci. 2023, 1, 596–600. [Google Scholar] [CrossRef]
- Ammineni, P. Adaptive Control Systems in Unmanned Surface Vehicles: Harnessing the Power of AI and ML. Int. J. Sci. Res. 2023, 12, 1324–1329. [Google Scholar] [CrossRef]
- Luo, H.; Jia, S.; Chen, S.; Ma, L. Embodied intelligence in unmanned surface vehicles: Current applications and future perspectives. In Proceedings of the International Conference on Algorithms, High Performance Computing, and Artificial Intelligence (AHPCAI 2024), Zhengzhou, China, 21–23 June 2024; Loskot, P., Hu, L., Eds.; SPIE: Bellingham, WA, USA, 2024; p. 56. [Google Scholar] [CrossRef]
- Xue, J.; Song, Y.; Hu, H. Formation Control of a Multi-Unmanned Surface Vessel System: A Bibliometric Analysis. J. Mar. Sci. Eng. 2024, 12, 1484. [Google Scholar] [CrossRef]
- Nzengu, W.; Faivre, J.; Pauwelyn, A.S.; Bolbot, V.; Lien Wennersberg, L.A.; Theotokatos, G. Regulatory framework analysis for the unmanned inland waterway vessel. WMU J. Marit. Aff. 2021, 20, 357–376. [Google Scholar] [CrossRef]
- Ahmed, Y.A.; Theotokatos, G.; Maslov, I.; Wennersberg, L.A.L.; Nesheim, D.A. Regulatory and legal frameworks recommendations for short sea shipping maritime autonomous surface ships. Mar. Policy 2024, 166, 106226. [Google Scholar] [CrossRef]
- Komianos, A. The Autonomous Shipping Era. Operational, Regulatory, and Quality Challenges. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2018, 12, 335–348. [Google Scholar] [CrossRef]
- Van Hooydonk, E. The law of unmanned merchant shipping—An exploration. J. Int. Marit. Law 2014, 20, 403–423. [Google Scholar]
- Chang, Y.C.; Zhang, C.; Wang, N. The international legal status of the unmanned maritime vehicles. Mar. Policy 2020, 113, 103830. [Google Scholar] [CrossRef]
- GAO. Coast Guard: Autonomous Ships and Efforts to Regulate Them; GAO: Washington, DC, USA, 2024.
- Fenton, A.J.; Chapsos, I. Ships without crews: IMO and UK responses to cybersecurity, technology, law and regulation of maritime autonomous surface ships (MASS). Front. Comput. Sci. 2023, 5, 1151188. [Google Scholar] [CrossRef]
- Ocean Infinity. Armada 78 USV. Available online: https://oceaninfinity.com/wp-content/uploads/2023/08/OI-ARMADA78-Spec-Sheet-2023.pdf (accessed on 8 January 2025).
- Negenborn, R.R.; Goerlandt, F.; Johansen, T.A.; Slaets, P.; Valdez Banda, O.A.; Vanelslander, T.; Ventikos, N.P. Autonomous ships are on the horizon: Here’s what we need to know. Nature 2023, 615, 30–33. [Google Scholar] [CrossRef]
- Hussain, N.A.A.; Sathyamoorthy, D.; Nasuddin, N.M.; Nawi, N.M.; Mansor, M.N.; Sulaiman, N.E.S.; Yaacob, R.; Ramli, R.; Rashid, M.R.M.; Ramli, I.; et al. Development of a prototype unmanned surface vessel (usv) platform. Def. S&T Tech. Bull. 2013, 6, 1–9. [Google Scholar]
- Coelho, R.; Daltry, R.; Dobbin, V.; Lachaud, E.; Miller, I. Design Process and Validation of an Autonomous Surface Vehicle for the Offshore Industry. In Proceedings of the Day 2 Wed, October 28, 2015, OTC, Rio de Janeiro, Brazil, 27–29 October 2015. 15OTCB. [Google Scholar] [CrossRef]
- Dobref, V.; Popa, I.; Popov, P.; Scurtu, I.C. Unmanned Surface Vessel for Marine Data Acquisition. IOP Conf. Ser. Earth Environ. Sci. 2018, 172, 012034. [Google Scholar] [CrossRef]
- Brooks, D.; Faria, H. Advancing Unmanned Surface Vessel Design: A Circular Economy Response to Global Conflict Evolution. In Proceedings of the Conference on Social Sciences, iSCSS, Liverpool, UK, 5–7 November 2024; Volume 2024. [Google Scholar] [CrossRef]
- Ge, J.; Li, T.; Geng, T. The Wireless Communications for Unmanned Surface Vehicle: An Overview. In Intelligent Robotics and Applications; Springer International Publishing: Berlin/Heidelberg, Germany, 2018; pp. 113–119. [Google Scholar] [CrossRef]
- Helgesen, O.K.; Brekke, E.F.; Helgesen, H.H.; Engelhardtsen, O. Sensor Combinations in Heterogeneous Multi-sensor Fusion for Maritime Target Tracking. In Proceedings of the 2019 22th International Conference on Information Fusion (FUSION), Ottawa, ON, Canada, 2–5 July 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–9. [Google Scholar] [CrossRef]
- Han, J.; Cho, Y.; Kim, J.; Kim, J.; Son, N.; Kim, S.Y. Autonomous collision detection and avoidance for ARAGON USV: Development and field tests. J. Field Robot. 2020, 37, 987–1002. [Google Scholar] [CrossRef]
- Steimle, E.T.; Hall, M.L. Unmanned Surface Vehicles as Environmental Monitoring and Assessment Tools. In Proceedings of the OCEANS 2006, Boston, MA, USA, 18–22 September 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 1–5. [Google Scholar] [CrossRef]
- de Winter, J. How USVs can Change the Offshore Inspection Market Through Novel Operating Models. In Proceedings of the Day 1 Mon, May 06, 2024, OTC, Houston, TX, USA, 6–9 May 2024. 24OTC. [Google Scholar] [CrossRef]
- Khalil, R.A.; Haris, M.; Saeed, N. Beyond Line of Sight Defense Communication Systems: Recent Advances and Future Challenges. arXiv 2023, arXiv:2312.06491. [Google Scholar] [CrossRef]
- Atkins, E. Autonomy as an enabler of economically-viable, beyond-line-of-sight, low-altitude UAS applications with acceptable risk. In Proceedings of the AUVSI unmanned Systems, Orlando, FL, USA, 12–15 May 2014. [Google Scholar]
- SeaRobotics. SR Endurance Class USVs. Available online: https://www.searobotics.com/products/autonomous-surface-vehicles/sr-endurance-class (accessed on 13 January 2025).
- Mouly, M.; Pautet, M.B. The GSM System for Mobile Communications; Telecom Publishing: London, UK, 1992. [Google Scholar]
- Gu, G.; Peng, G. The survey of GSM wireless communication system. In Proceedings of the 2010 International Conference on Computer and Information Application, Tianjin, China, 3–5 December 2010; IEEE: Piscataway, NJ, USA, 2010. [Google Scholar] [CrossRef]
- Sailbuoy. The Sailbuoy Technology. Available online: https://sailbuoy.no/the-sailbuoy-technology/#data (accessed on 9 January 2025).
- Ezhilarasan, E.; Dinakaran, M. A Review on Mobile Technologies: 3G, 4G and 5G. In Proceedings of the 2017 Second International Conference on Recent Trends and Challenges in Computational Models (ICRTCCM), Tindivanam, India, 3–4 February 2017; IEEE: Piscataway, NJ, USA, 2017; pp. 369–373. [Google Scholar] [CrossRef]
- Fagbohun, O.O. Comparative studies on 3G, 4G and 5G wireless technology. IOSR J. Electron. Commun. Eng. 2014, 9, 88–94. [Google Scholar] [CrossRef]
- Open Ocean Robotics. Autonomous Surface Vehicles. Available online: https://www.openoceanrobotics.com/surface-vehicles (accessed on 13 January 2025).
- Maritime Robotics. Otter Unmanned Surface Vehicle. Available online: https://www.maritimerobotics.com/otter (accessed on 8 January 2025).
- Tidewise. Tupan USV. Available online: https://www.tidewise.io/tecnologia-usv-tupan (accessed on 8 January 2025).
- Leopold, R.; Miller, A. The IRIDIUM communications system. IEEE Potentials 1993, 12, 6–9. [Google Scholar] [CrossRef]
- Maine, K.; Devieux, C.; Swan, P. Overview of IRIDIUM satellite network. In Proceedings of the WESCON’95, San Francisco, CA, USA, 7–9 November 1995; IEEE: Piscataway, NJ, USA, 1995. WESCON/95. p. 483. [Google Scholar] [CrossRef]
- Ocean Infinity. Armada 8 USV. Available online: https://oceaninfinity.com/downloads/ (accessed on 8 January 2025).
- Grayver, E.; Nelson, R.; McDonald, E.; Sorensen, E.; Romano, S. Position and Navigation Using Starlink. In Proceedings of the 2024 IEEE Aerospace Conference, Big Sky, MT, USA, 2–9 March 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 1–12. [Google Scholar] [CrossRef]
- Kassas, Z.; Neinavaie, M.; Khalife, J.; Khairallah, N.; Kozhaya, S.; Haidar-Ahmad, J.; Shadram, Z. Enter LEO on the GNSS Stage: Navigation with Starlink Satellites; Inside GNSS Media & Research LLC: Red Bank, NJ, USA, 2021. [Google Scholar]
- Saildrone. Saildrone Technology Vehicles. Available online: https://www.saildrone.com/technology/vehicles (accessed on 9 January 2025).
- Wang, J.-l.; Liu, C.-s. Development and Application of INMARSAT Satellite Communication System. In Proceedings of the 2011 First International Conference on Instrumentation, Measurement, Computer, Communication and Control, Beijing, China, 21–23 October 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 619–621. [Google Scholar] [CrossRef]
- SEA-KIT. SEA-KIT USVs. Available online: https://www.sea-kit.com (accessed on 8 January 2025).
- Ishteyaq, I.; Muzaffar, K. Multiple input multiple output (MIMO) and fifth generation (5G): An indispensable technology for sub-6 GHz and millimeter wave future generation mobile terminal applications. Int. J. Microw. Wirel. Technol. 2021, 14, 932–948. [Google Scholar] [CrossRef]
- Pahlavan, K.; Krishnamurthy, P. Evolution and Impact of Wi-Fi Technology and Applications: A Historical Perspective. Int. J. Wirel. Inf. Netw. 2020, 28, 3–19. [Google Scholar] [CrossRef]
- Exail. Uncrewed Surface Vessels—DriX Series. Available online: https://www.exail.com/product-range/drix-series-uncrewed-surface-vessels (accessed on 9 January 2025).
- Caverly, R.; Breed, G.; Cantrell, W.H.; Eron, M.; Garcia, J.A.; Kondrath, N.; Myer, D.; Ruiz, M.N.; Walker, J.L. Advancements at the Lower End: Advances in HF, VHF, and UHF Systems and Technology. IEEE Microw. Mag. 2015, 16, 28–49. [Google Scholar] [CrossRef]
- L3Harris. Autonomous Systems. Available online: https://www.l3harris.com/all-capabilities/autonomous-systems (accessed on 8 January 2025).
- Salih, M.M.; Abbas, S.J.; Ahmed, A.I.; Nedashkivskiy, O. Implementation and Comparison of COFDM and OFDM using TMS320C6713. In Proceedings of the 2024 35th Conference of Open Innovations Association (FRUCT), Tampere, Finland, 24–26 April 2024; IEEE: Piscataway, NJ, USA, 2024; pp. 633–641. [Google Scholar] [CrossRef]
- L3Harris. C-Cat 3 ASV. Available online: https://www.l3harris.com/sites/default/files/2022-06/ims-maritime-asv-C-Cat-3-data-sheet.pdf (accessed on 9 January 2025).
- Miyusov, M.V.; Koshevoy, V.M.; Shishkin, A.V. Increasing Maritime Safety: Integration of the Digital Selective Calling VHF Marine Radiocommunication System and ECDIS. TransNav Int. J. Mar. Navig. Saf. Sea Transp. 2011, 5, 159–161. [Google Scholar]
- Kongsberg. The Maritime Broadband Radio (MBR) Family. Available online: https://www.kongsberg.com/contentassets/aefda46a15ae491fb71a724a2e4782bd/mbr_family.pdf (accessed on 18 April 2025).
- Kongsberg. Sounder USV Range. Available online: https://www.kongsberg.com/discovery/autonomous-and-uncrewed-solutions/sounder-usv-range/sounder-usv/ (accessed on 10 January 2025).
- Liquid Robotics. Wave Glider USV. Available online: https://www.liquid-robotics.com/wave-glider/overview/ (accessed on 10 January 2025).
- Manoufali, M.; Alshaer, H.; Kong, P.Y.; Jimaa, S. Technologies and networks supporting maritime wireless mesh communications. In Proceedings of the 6th Joint IFIP Wireless and Mobile Networking Conference (WMNC), Dubai, United Arab Emirates, 23–25 April 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 1–8. [Google Scholar] [CrossRef]
- WAM-V. WAM-V Series USVs. Available online: https://wam-v.com/bestsellers (accessed on 13 January 2025).
- Wang, H.; Wang, G.; Zhang, L. Research on the Encryption of Ship-to-Shore Control Commands for Unmanned Surface Vehicle. In Proceedings of the 2022 7th International Conference on Automation, Control and Robotics Engineering (CACRE), Virtual, 15–16 July 2022; IEEE: Piscataway, NJ, USA, 2022; pp. 8–13. [Google Scholar] [CrossRef]
- Yang, T.; Guo, Y.; Zhou, Y.; Wei, S. Joint Communication and Control for Small Underactuated USV Based on Mobile Computing Technology. IEEE Access 2019, 7, 160610–160622. [Google Scholar] [CrossRef]
- Hinostroza, M.; Xu, H.; Guedes Soares, C. Experimental results of the cooperative operation of autonomous surface vehicles navigating in complex marine environment. Ocean Eng. 2021, 219, 108256. [Google Scholar] [CrossRef]
- Zoss, B.M.; Mateo, D.; Kuan, Y.K.; Tokić, G.; Chamanbaz, M.; Goh, L.; Vallegra, F.; Bouffanais, R.; Yue, D.K.P. Distributed system of autonomous buoys for scalable deployment and monitoring of large waterbodies. Auton. Robot. 2018, 42, 1669–1689. [Google Scholar] [CrossRef]
- Chamanbaz, M.; Mateo, D.; Zoss, B.M.; Tokić, G.; Wilhelm, E.; Bouffanais, R.; Yue, D.K.P. Swarm-Enabling Technology for Multi-Robot Systems. Front. Robot. AI 2017, 4. [Google Scholar] [CrossRef]
- Benjamin, M.R.; Leonard, J.J.; Curcio, J.A.; Newman, P.M. A method for protocol-based collision avoidance between autonomous marine surface craft. J. Field Robot. 2006, 23, 333–346. [Google Scholar] [CrossRef]
- Lee, S.M.; Kwon, K.Y.; Joh, J. A fuzzy logic for autonomous navigation of marine vehicles satisfying COLREG guidelines. Int. J. Control. Autom. Syst. 2004, 2, 171–181. [Google Scholar]
- Svec, P.; Shah, B.C.; Bertaska, I.R.; Alvarez, J.; Sinisterra, A.J.; von Ellenrieder, K.; Dhanak, M.; Gupta, S.K. Dynamics-aware target following for an autonomous surface vehicle operating under COLREGs in civilian traffic. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 3871–3878. [Google Scholar] [CrossRef]
- Maritime Robotics. Mariner X Unmanned Surface Vehicle. Available online: https://www.maritimerobotics.com/mariner-x (accessed on 8 January 2025).
- Maritime Robotics. Mariner Unmanned Surface Vehicle. Available online: https://www.maritimerobotics.com/mariner (accessed on 8 January 2025).
- L3Harris. C-Worker 4 ASV. Available online: https://www.l3harris.com/all-capabilities/c-worker-4-asv (accessed on 9 January 2025).
- L3Harris. C-Worker 5 ASV. Available online: https://www.l3harris.com/all-capabilities/c-worker-5-asv (accessed on 9 January 2025).
- L3Harris. C-Worker 7 ASV. Available online: https://www.l3harris.com/sites/default/files/2022-10/ims-maritime-C-Worker-7-Sell-Sheet.pdf (accessed on 9 January 2025).
- ECA Group. Inspector 125 USV. Available online: https://www.ecagroup.com/en/solutions/unmanned-surface-vehicle-inspector-125 (accessed on 9 January 2025).
- XOCEAN. XO-450 USV. Available online: https://xocean.com/technology/ (accessed on 18 April 2025).
- SeaTrac. The SeaTrac System. Available online: https://www.seatrac.com/the-seatrac-system/hardware-the-boat/ (accessed on 10 January 2025).
- OceanAlpha. L25 USV. Available online: https://oceanalpha.com/product-item/l25/ (accessed on 11 January 2025).
- OceanAlpha. ME120 USV. Available online: https://oceanalpha.com/product-item/me120/ (accessed on 11 January 2025).
- OceanAlpha. M40P USV. Available online: https://oceanalpha.com/product-item/m40p/ (accessed on 11 January 2025).
- OceanAlpha. M80 USV. Available online: https://oceanalpha.com/product-item/m80/ (accessed on 11 January 2025).
- OceanAlpha. M75 USV. Available online: https://oceanalpha.com/product-item/m75/ (accessed on 12 January 2025).
- Group, U. Uni-Pact USV. Available online: https://www.uniquegroup.com/product/ug-uni-pact/ (accessed on 12 January 2025).
- Unique Group. Uni-Max USV. Available online: https://www.uniquegroup.com/product/ug-uni-cat/ (accessed on 12 January 2025).
- Seafloor Systems. HydroCat-550 USV. Available online: https://www.seafloorsystems.com/hydrocat-550 (accessed on 12 January 2025).
- Seafloor Systems. EchoBoat-240 USV. Available online: https://www.seafloorsystems.com/echoboat-240 (accessed on 12 January 2025).
- AutoNaut. AutoNaut USVs. Available online: https://autonautusv.com/vessels-0 (accessed on 12 January 2025).
- Seasats. Lightfish USV. Available online: https://seasats.com (accessed on 13 January 2025).
- USSV. Mero USV. Available online: https://ussvtech.com/usv-mero (accessed on 13 January 2025).
- USSV. C-400 USV. Available online: https://ussvtech.com/c-400 (accessed on 13 January 2025).




| References | Comments | Type | Range |
|---|---|---|---|
| [42,43,44] | BLOS (Beyond Line of Sight) | Terrestrial | Cellular (∼50 km per tower) |
| [45,46,47] | GSM | Terrestrial | Cellular (∼30 km per tower) |
| [48,49,50] | 3G | Terrestrial | Cellular (∼10–30 km per tower) |
| [48,49,51] | 4G | Terrestrial | Cellular (∼50 km per tower) |
| [48,49,52] | 5G | Terrestrial | Cellular (∼1–10 km per tower) |
| [53,54,55] | Iridium | LEO (Low Earth Orbit) | Global |
| [56,57,58] | Starlink | LEO (Low Earth Orbit) | Global |
| [59,60] | Inmarsat | MEO (Medium Earth Orbit)/GEO | Global |
| [51,61] | MIMO radio | Terrestrial | Long (10–100 km) |
| [52,62,63] | Wi-Fi | Terrestrial | Short (∼100 m–1 km) |
| [55,60,64] | VHF | Terrestrial | Medium (∼50 km) |
| [63,64,65] | UHF | Terrestrial | Short–medium (∼10–50 km) |
| [52,66,67] | COFDM (Coded Orthogonal Frequency Division Multiplexing) | Terrestrial | Medium (∼10–50 km) |
| [60,68] | DSC (Digital Selective Calling) | Terrestrial | Medium (∼50 km) |
| [69,70] | Kongsberg Maritime Broadband Radio (MBR) | Terrestrial | Medium (∼50 km) |
| [71] | Line-of-sight radio | Terrestrial | Short–medium (∼10–50 km) |
| [65,67,72] | Mesh radio | Terrestrial | Medium (∼10–50 km) |
| [37,73] | Short-range radio | Terrestrial | Short (∼1 km) |
| [73,74] | Encrypted wireless network | Terrestrial | Short–medium (∼1–50 km) |
| [44,75] | RC transmitter | Terrestrial | Short (∼1 km) |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
de Andrade, E.M.; Sales, J.S., Jr.; Fernandes, A.C. Operative Unmanned Surface Vessels (USVs): A Review of Market-Ready Solutions. Automation 2025, 6, 17. https://doi.org/10.3390/automation6020017
de Andrade EM, Sales JS Jr., Fernandes AC. Operative Unmanned Surface Vessels (USVs): A Review of Market-Ready Solutions. Automation. 2025; 6(2):17. https://doi.org/10.3390/automation6020017
Chicago/Turabian Stylede Andrade, Emerson Martins, Joel Sena Sales, Jr., and Antonio Carlos Fernandes. 2025. "Operative Unmanned Surface Vessels (USVs): A Review of Market-Ready Solutions" Automation 6, no. 2: 17. https://doi.org/10.3390/automation6020017
APA Stylede Andrade, E. M., Sales, J. S., Jr., & Fernandes, A. C. (2025). Operative Unmanned Surface Vessels (USVs): A Review of Market-Ready Solutions. Automation, 6(2), 17. https://doi.org/10.3390/automation6020017