
Influence of Internal Rubber Damper on Cable External Viscous Damper Effectiveness

Abstract
:1. Introduction
2. Model of the Cable-Internal Rubber Damper-External Viscous Damper System
2.1. Model of Dampers
2.2. Formulation of Cable System
2.3. Asymptotic Solution
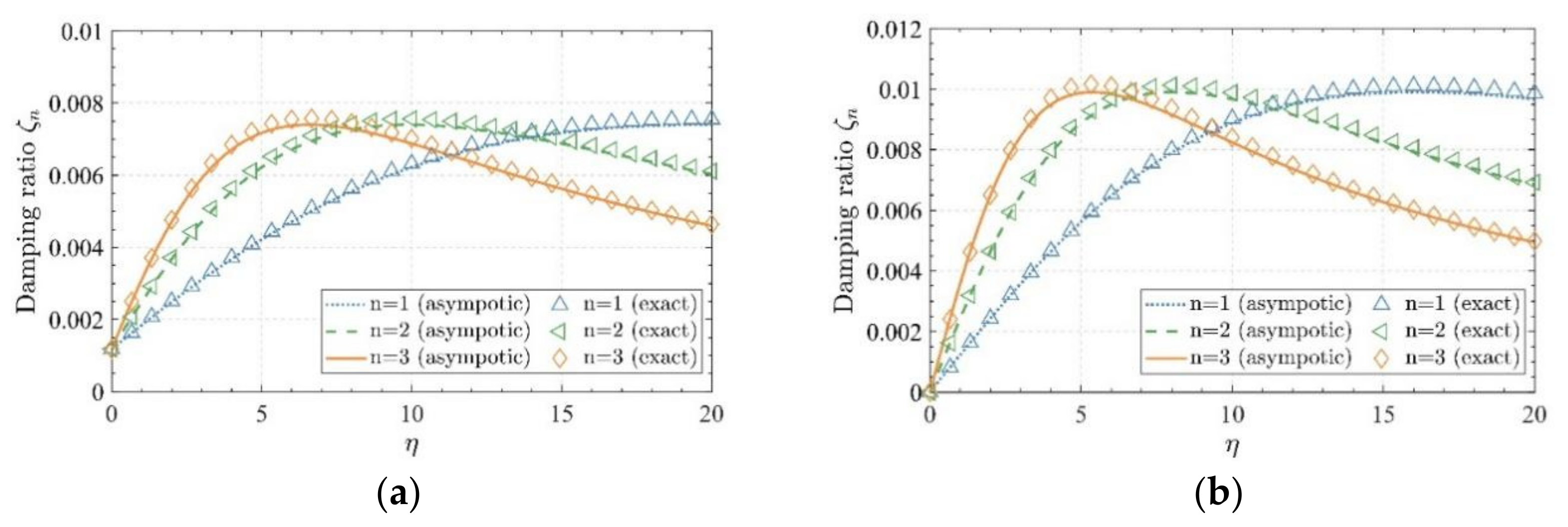
2.4. Comparison of Asymptotic and Numerical Solutions
3. Influences of Internal Rubber Damper on External Viscous Damper
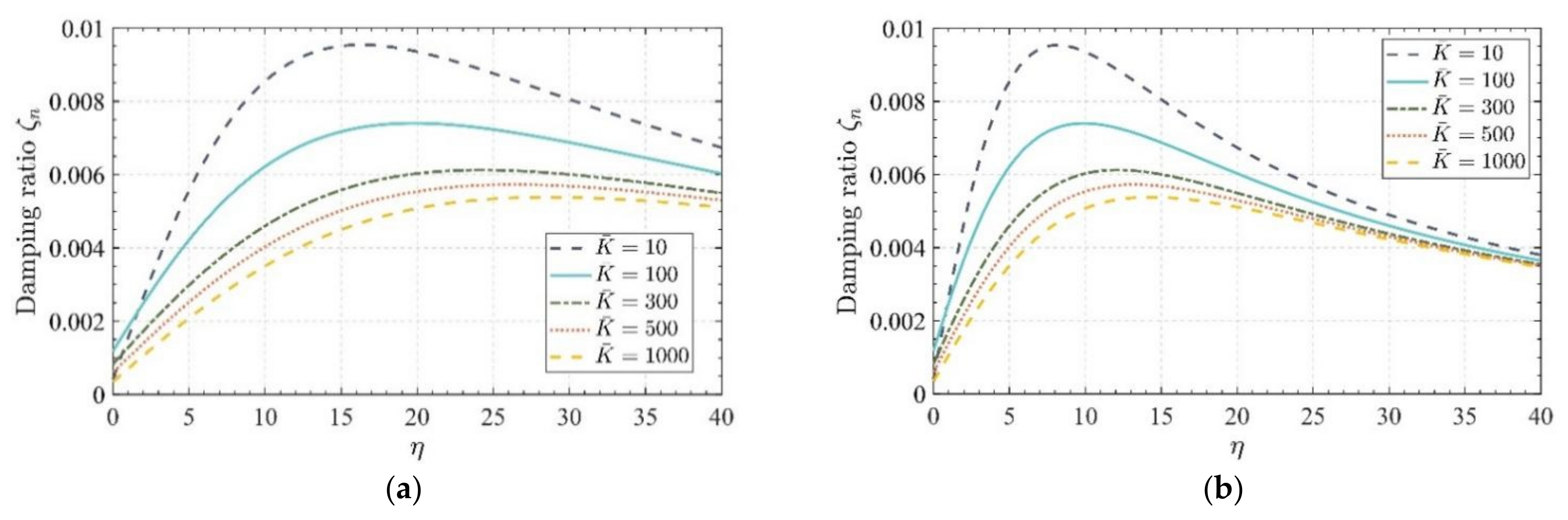
3.1. Impact of Stiffness () of Internal Rubber Damper
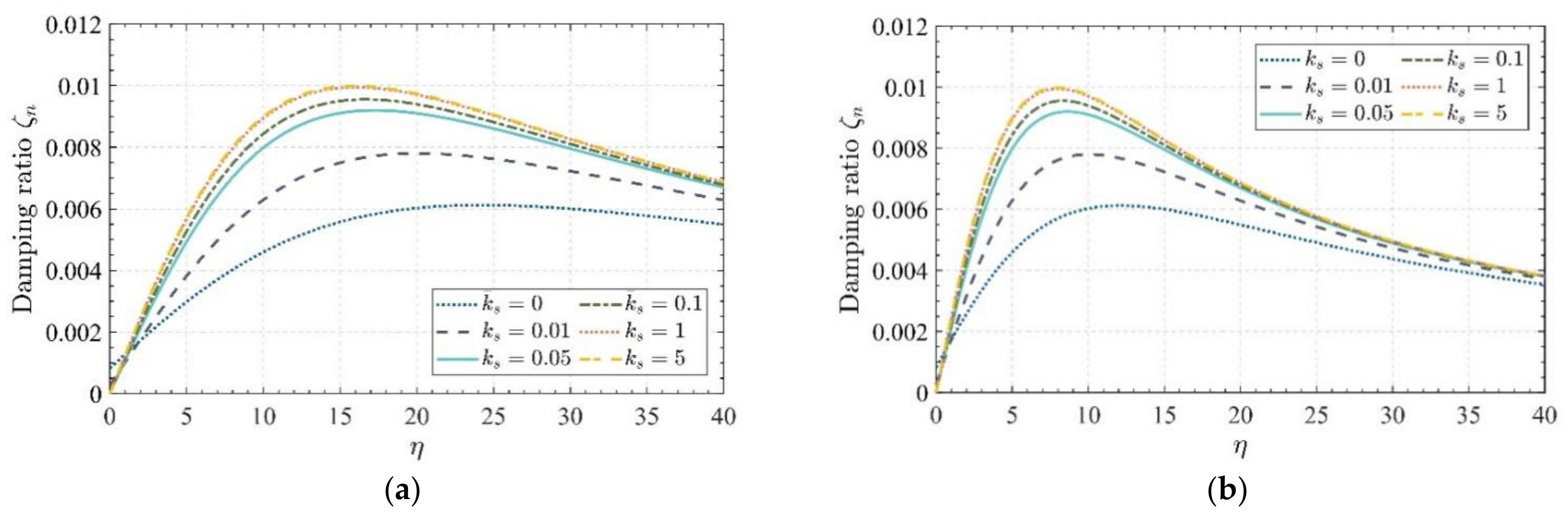
3.2. Impact of Loss Factor () of Internal Rubber Damper
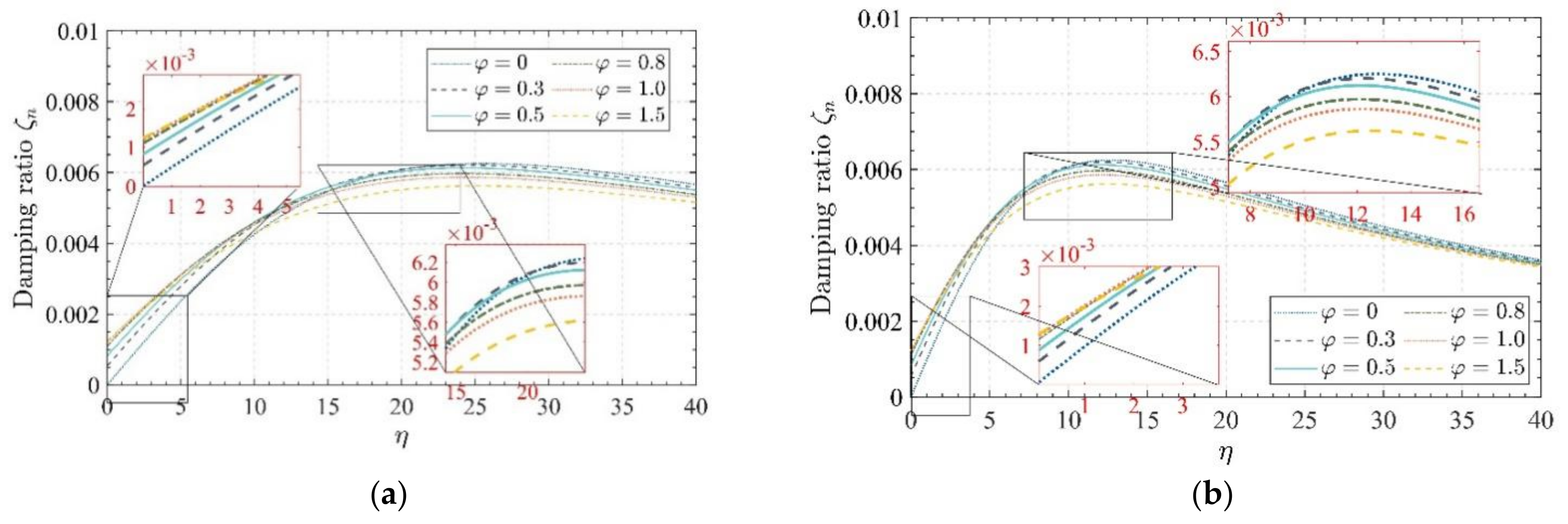
3.3. Impact of Support Flexibility () of Internal Rubber Damper
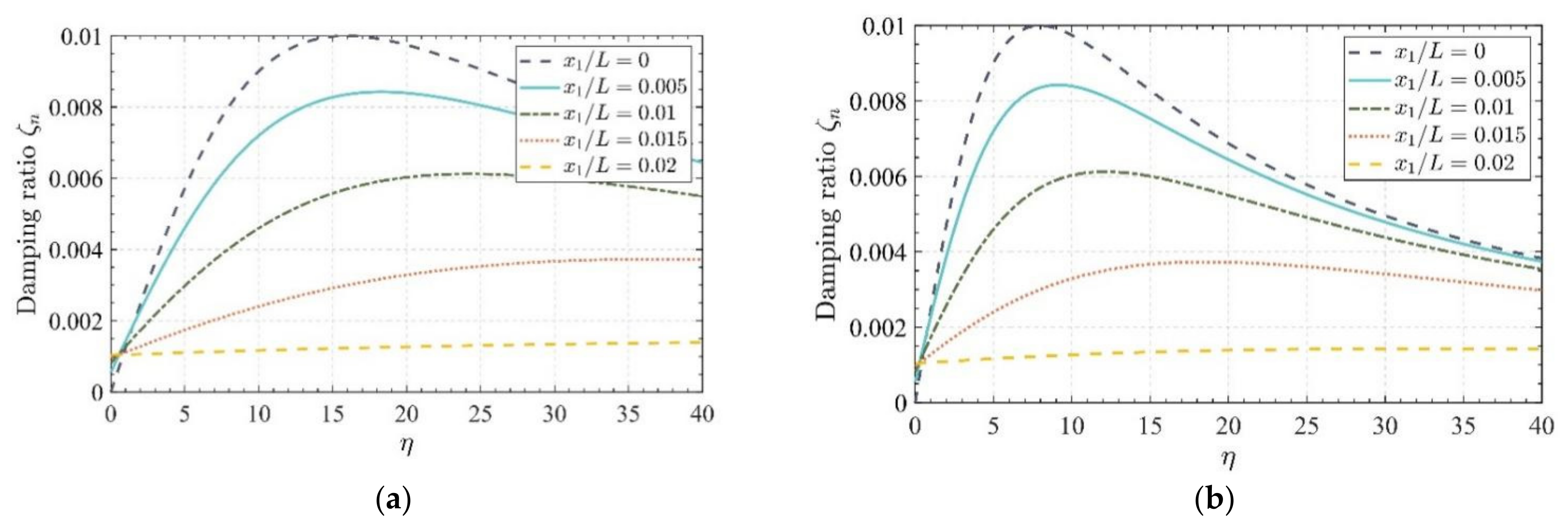
3.4. Impact of Location () of Internal Rubber Damper
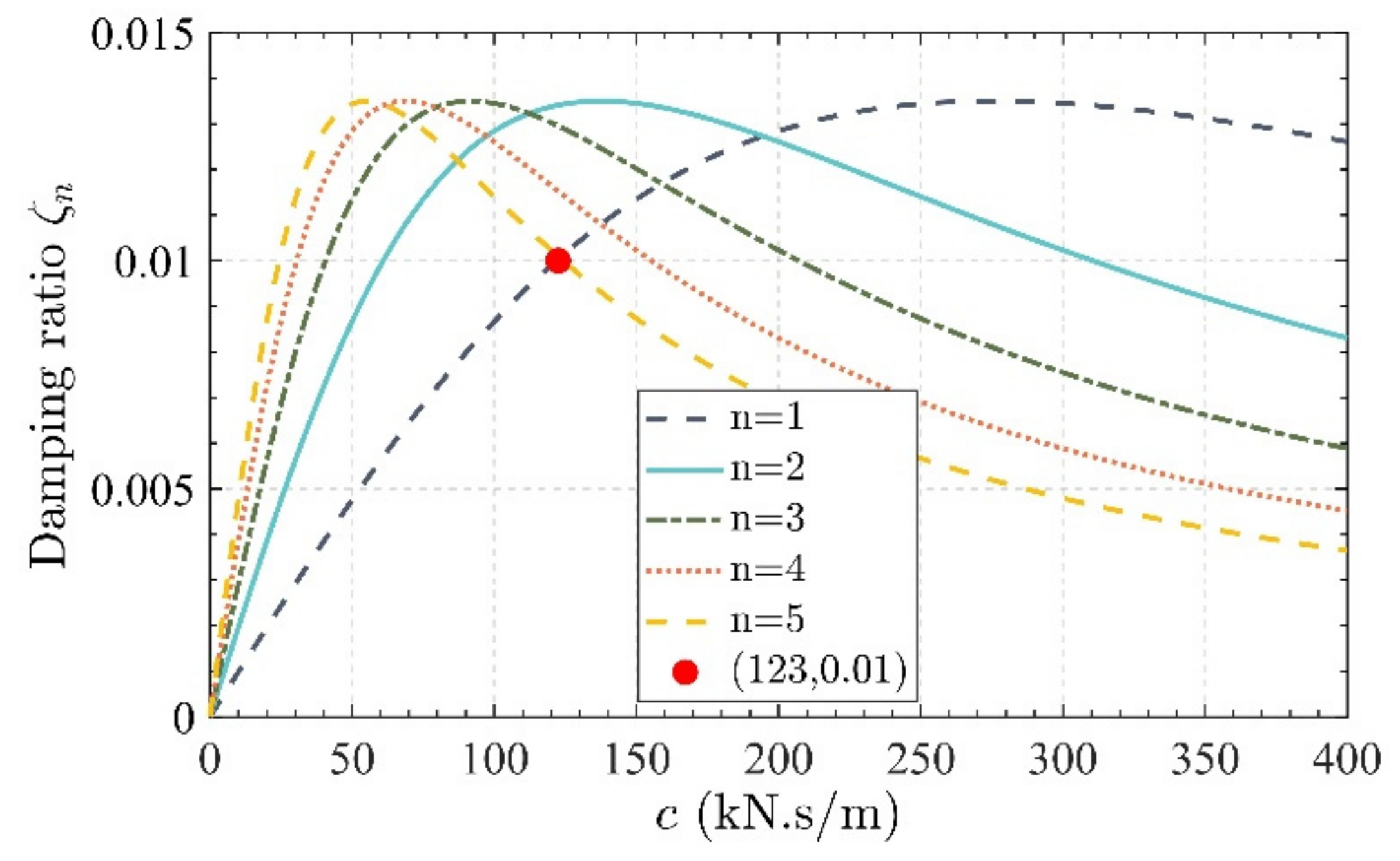
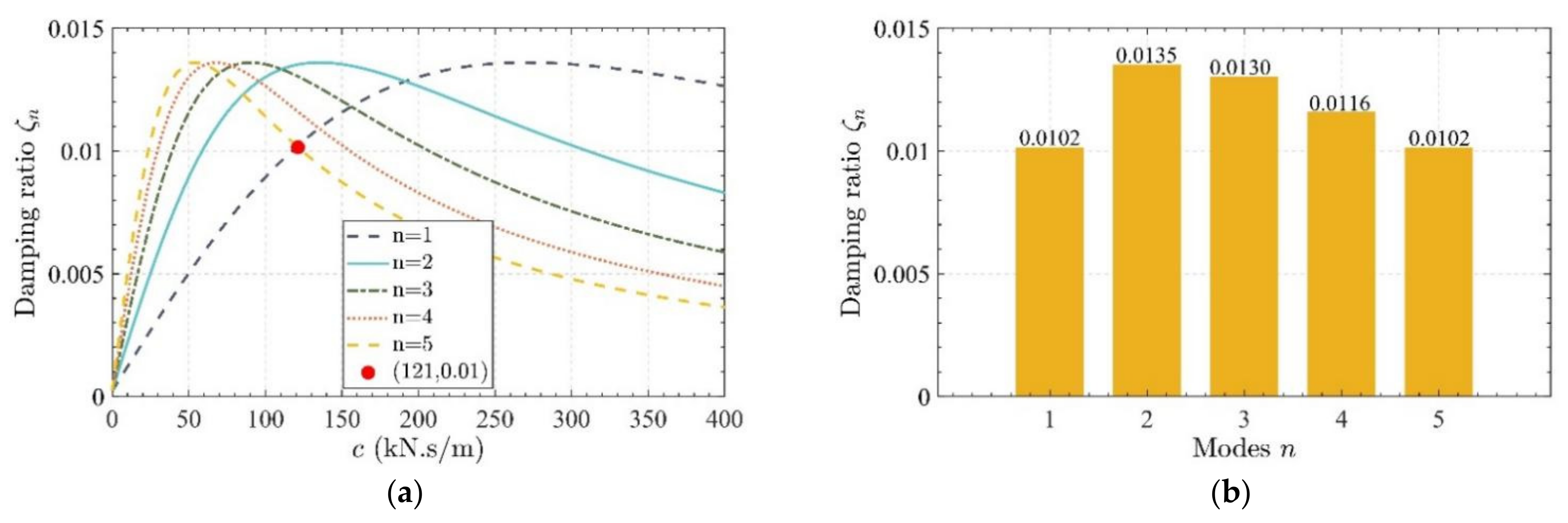
4. Multimode Modal Damping Effect Analysis
5. Conclusions
- 1.
- For the single-mode vibration of the cable, the stiffness of the internal rubber damper has a significant negative effect on the external viscous damper. In the design of the external viscous damper, the adverse effects of the stiffness of the internal rubber damper should be considered; enhancing the energy dissipation capacity of the internal rubber damper, i.e., increasing rubber damper loss factor is not good for increasing the cable maximum modal damping. However, due to the small loss factor of the internal rubber damper in practice, its influence on the external damper is limited; the support flexibility of the internal rubber damper can reduce its negative impact on the external viscous damper; the internal rubber damper harms the performance of the external viscous damper, and its negative effects become more pronounced as the rubber damper location is close to the external viscous damper.
- 2.
- From the perspective of multimode vibration control, the installation of an internal rubber damper can significantly weaken the cable modal damping in the first several modes, and hence the adverse effects of the internal rubber damper must be considered in the design of an external viscous damper. In addition, the negative effect of the internal rubber dampers on the cable modal damping is more significant in the low-frequency modes, and this adverse effect will be reduced as the mode order increases.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Fujino, Y.; Kimura, K.; Tanaka, H. Cable vibrations and control methods. In Wind Resistant Design of Bridges in Japan; Springer: Tokyo, Japan, 2012; pp. 197–229. [Google Scholar]
- Zuo, D.; Jones, N.P. Interpretation of field observations of wind-and rain-wind-induced stay cable vibrations. J. Wind Eng. Ind. Aerod. 2012, 98, 73–87. [Google Scholar] [CrossRef]
- Matsumoto, M.; Shirato, H.; Yagi, T.; Goto, M.; Sakai, S.; Ohya, J. Field observation of the full-scale wind-induced cable vibration. J. Wind Eng. Ind. Aerod. 2003, 91, 13–26. [Google Scholar] [CrossRef]
- Gu, M. On wind–rain induced vibration of cables of cable-stayed bridges based on quasi-steady assumption. J. Wind Eng. Ind. Aerod. 2009, 97, 381–391. [Google Scholar] [CrossRef]
- Kleissl, K.; Georgakis, C.T. Aerodynamic control of bridge cables through shape modification: A preliminary study. J. Fluid. Struct. 2011, 27, 1006–1020. [Google Scholar] [CrossRef]
- Gu, M.; Du, X. Experimental investigation of rain–wind-induced vibration of cables in cable-stayed bridges and its mitigation. J. Wind Eng. Ind. Aerod. 2005, 93, 79–95. [Google Scholar] [CrossRef]
- Main, J.A.; Jones, N.P. Evaluation of viscous dampers for stay-cable vibration mitigation. J. Bridge Eng. 2001, 6, 385–397. [Google Scholar] [CrossRef]
- Chen, L.; Di, F.; Xu, Y.; Sun, L.; Xu, Y.; Wang, L. Multimode cable vibration control using a viscous-shear damper: Case studies on the Sutong Bridge. Struct. Control Health Monit. 2020, 27, e2536. [Google Scholar] [CrossRef]
- Caracoglia, L.; Jones, N.P. In-plane dynamic behavior of cable networks. Part 1: Formulation and basic solutions. J. Sound Vib. 2005, 27, 969–991. [Google Scholar] [CrossRef]
- Caracoglia, L.; Jones, N.P. In-plane dynamic behavior of cable networks. Part 2: Prototype prediction and validation. J. Sound Vib. 2005, 279, 993–1014. [Google Scholar] [CrossRef]
- Di, F.; Sun, L.; Chen, L. In-plane dynamic behaviors of two-cable networks with a pretensioned cross-tie. Struct. Control Health Monit. 2021, 28, e2755. [Google Scholar] [CrossRef]
- Di, F.; Sun, L.; Chen, L. Optimization of hybrid cable networks with dampers and cross-ties for vibration control via multi-objective genetic algorithm. Mech. Syst. Signal Process. 2022, 166, 108454. [Google Scholar] [CrossRef]
- TG, C. Guy Cable Design and Damping for Vertical Axis Wind Turbines; Report; Sandia National Laboratories: Albuquerque, NM, USA, 1980. [Google Scholar]
- Kovacs, I. Zur frage der seilschwingungen und der seildämpfung. Bautechnik 1982, 59, 325–332. [Google Scholar]
- Pacheo, B.M.; Fujino, Y.; Sulkh, A. Estimation curve for modal damping in stay cable with viscous damper. J. Struct. Eng. 1993, 119, 1961–1979. [Google Scholar] [CrossRef]
- Xu, Y.L.; Yu, Z. Mitigation of three-dimensional vibration of inclined sag cable using discrete oil dampers—II. Application. J. Sound Vib. 1998, 214, 675–693. [Google Scholar] [CrossRef]
- Tabatabai, H.; Mehrabi, A.B. Design of mechanical viscous dampers for stay cables. J. Bridge Eng. 2000, 5, 114–123. [Google Scholar] [CrossRef]
- Krenk, S.; Nielsen, S.R. Vibrations of a shallow cable with a viscous damper. Proc. R. Soc. A 2002, 458, 339–357. [Google Scholar] [CrossRef] [Green Version]
- Krenk, S.; Høgsberg, J.R. Damping of cables by a transverse force. J. Eng. Mech. 2005, 131, 340–348. [Google Scholar] [CrossRef]
- Main, J.A.; Jones, N.P. Free vibrations of taut cable with attached damper. I: Linear viscous damper. J. Eng. Mech. 2002, 128, 1062–1071. [Google Scholar] [CrossRef] [Green Version]
- Main, J.A.; Jones, N.P. Vibration of tensioned beams with intermediate damper. I: Formulation, influence of damper location. J. Eng. Mech. 2007, 133, 369–378. [Google Scholar] [CrossRef] [Green Version]
- Zhou, Y. Dynamic Characteristics and Vibration Mitigation of Stay Cables Using Cross Ties. Ph.D. Dissertation, Tongji University, Shanghai, China, 2007. [Google Scholar]
- Chen, L.; Sun, L. Steady-state analysis of cable with nonlinear damper via harmonic balance method for maximizing damping. J. Struct. Eng. 2017, 143, 04016172. [Google Scholar] [CrossRef]
- Chen, L.; Sun, L.; Nagarajaiah, S. Cable with discrete negative stiffness device and viscous damper: Passive realization and general characteristics. Smart Struct. Syst. 2015, 15, 627–643. [Google Scholar] [CrossRef]
- Wang, Z.; Yue, F.; Gao, H. Free vibration of a taut cable with two discrete inertial mass dampers. Appl. Sci. 2019, 9, 3919. [Google Scholar] [CrossRef] [Green Version]
- Caracoglia, L.; Jones, N.P. Damping of taut-cable systems: Two dampers on a single stay. J. Eng. Mech. 2007, 133, 1050–1060. [Google Scholar] [CrossRef]
- Hoang, N.; Fujino, Y. Combined damping effect of two dampers on a stay cable. J. Bridge Eng. 2008, 13, 299–303. [Google Scholar] [CrossRef]
- Cu, V.H.; Han, B.; Wang, F. Damping of a taut cable with two attached high damping rubber dampers, Struct. Eng. Mech. Int. J. 2015, 55, 1261–1278. [Google Scholar]
- Di, F.; Sun, L.; Chen, L. Cable vibration control with internal and external dampers: Theoretical analysis and field test validation. Smart Struct. Syst. 2020, 26, 575–589. [Google Scholar]
- Di, F.; Sun, L.; Chen, L. Suppression of vortex-induced high-mode vibrations of a cable-damper system by an additional damper. Eng. Struct. 2021, 242, 112495. [Google Scholar] [CrossRef]
- Nguyen, D.T.; Vo, D.H.; Haque, M. Theoretical Investigation on the Impact of Two HDR Dampers on First Modal Damping Ratio of Stay Cable. Appl. Sci. 2021, 11, 10985. [Google Scholar] [CrossRef]
- Yoneda, M.; Mochizuki, H.; Setouchi, H. On the simplified method for estimating modal damping in stay cable with two types of dampers and its application to vibration control design. Doboku Gakkai Ronbunshu 1995, 1995, 183–196. [Google Scholar] [CrossRef] [Green Version]
- Takano, H.; Ogasawara, M.; Ito, N.; Shimosato, T.; Takeda, K.; Murakami, T. Vibrational damper for cables of the Tsurumi Tsubasa Bridge. J. Wind Eng. Ind. Aerod. 1997, 69, 807–818. [Google Scholar] [CrossRef]
- Main, J.A.; Jones, N.P. Influence of rubber bushings on stay-cable damper effectiveness. In Proceedings of the Fifth International Symposium on Cable Dynamics, Santa Margherita Ligure, Italy, 15–18 September 2003; pp. 15–18. [Google Scholar]
- Fujino, Y.; Hoang, N. Design formulas for damping of a stay cable with a damper. J. Struct. Eng. 2008, 134, 269–278. [Google Scholar] [CrossRef]
- Krenk, S. Vibrations of a taut cable with an external damper. J. Appl. Mech. 2000, 67, 772–776. [Google Scholar] [CrossRef]
- Weber, F.; Feltrin, G.; Maślanka, M.; Fobo, W.; Distl, H. Design of viscous dampers targeting multiple cable modes. Eng. Struct. 2009, 31, 2797–2800. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Length L (m) | Tension T (kN) | Mass m (kg/m) | Fundamental Frequency (Hz) |
|---|---|---|---|
| 196.16 | 5436 | 100.18 | 0.59 |
| Mode | External Damper | Internal and External Dampers | Difference (%) |
|---|---|---|---|
| 1 | 0.0101 | 0.0079 | 21.78 |
| 2 | 0.0134 | 0.0113 | 15.67 |
| 3 | 0.0129 | 0.0115 | 10.85 |
| 4 | 0.0115 | 0.0106 | 7.83 |
| 5 | 0.0101 | 0.0095 | 5.94 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Li, C.; Peng, J.; Zhang, M.; Yang, C.; Cheng, Y.; Zhang, Y. Influence of Internal Rubber Damper on Cable External Viscous Damper Effectiveness. Eng 2022, 3, 224-235. https://doi.org/10.3390/eng3020017
Li C, Peng J, Zhang M, Yang C, Cheng Y, Zhang Y. Influence of Internal Rubber Damper on Cable External Viscous Damper Effectiveness. Eng. 2022; 3(2):224-235. https://doi.org/10.3390/eng3020017
Chicago/Turabian StyleLi, Changzhao, Jiayi Peng, Mengying Zhang, Chao Yang, Yu Cheng, and Yufeng Zhang. 2022. "Influence of Internal Rubber Damper on Cable External Viscous Damper Effectiveness" Eng 3, no. 2: 224-235. https://doi.org/10.3390/eng3020017