1. Introduction
Horizontally-inhomogeneous media are challenging objects for electrical prospecting. To obtain reliable data, it is necessary to use tensor modifications of the prospecting methods. Methods for measuring and interpreting tensor data are developed in detail for the magnetotelluric (MT) sounding method, operating in the frequency range 0.001–10 Hz, and for the audiomagnetotelluric (AMT) sounding method, frequency range 1–10,000 Hz, both based on the use of natural electromagnetic fields. Using multidirectional measuring arrays, recording the horizontal components of the electrical field Ex and Ey and the magnetic field Hx and Hy, as well as the vertical component of the magnetic field Hz, and using the tensor processing and interpretation of sounding data, reliable information can be obtained about the structure of horizontally inhomogeneous media [
1,
2].
The tensor version of the controlled-source audio magnetotelluric (CSAMT) sounding method, frequency range 0.1–10,000 Hz, is used in areas with complex geology. Two differently-directed transmitter lines (placed nearby or separated) are used, and the measurements of electrical and magnetic field components are done in the same way as in MT and AMT methods [
3]. If information about the predominant strike of geological structures at the studied site is available, orienting the transmitter lines parallel and perpendicular to the strike simplifies the interpretation, since measurement data are directly related to the transverse-electric (TE) and transverse-magnetic (TM) modes of the electromagnetic field. The CSAMT method is more efficient than MT and AMT methods when the level of industrial noise is high, as well as when it is necessary to obtain high-quality data in the MT “dead band” (frequency range 0.5–7 Hz) and AMT “dead band” (frequency range 800–5000 Hz) [
4].
The features of horizontally-inhomogeneous media are of particular relevance when interpreting data produced by near-surface electrical prospecting methods, since the upper part of a section is usually more heterogeneous than the deep horizons. This is especially true for permafrost regions. The structure of permafrost areas is characterized by a significant heterogeneity, including rock properties changing dramatically both vertically and horizontally. Areas of thawed rocks alternate with ice-rich sediments. In this case, the cryogenic boundaries in a section may not coincide with the geological boundaries. Underground ice and cryopegs create large contrasts in electrical properties.
Currently, processes of permafrost degradation occur in large areas, leading to an increase in the heterogeneity of frozen strata. The production of mineral resources in the Arctic regions and the construction of infrastructure require considerable year-round engineering and geophysical research. Electrical-prospecting methods are widely used in permafrost regions, since the electrical properties of frozen sediments are a sensitive indicator of their state. The direct current (DC) methods, such as vertical electrical sounding (VES) and electrical resistivity tomography (ERT), are the most commonly used in these studies [
5,
6,
7,
8,
9]. Taking into account the horizontally-heterogeneous structure of frozen strata, for engineering surveys in the permafrost regions, the VES method is often used not in a standard version with a single array, but in the modification of two-components (MTC) with two differently-directed lines [
10]. However, one of the main disadvantages of direct-current methods is the necessity of using grounded electrodes, which imposes seasonal restrictions on fieldwork and significantly slows the survey speed [
8].
Electromagnetic methods are more promising for year-round surveys in the permafrost zone, but they are not as widely used as direct-current methods, despite having a number of advantages: higher survey speed, the ability to work at any season of the year with ungrounded electrical sensors, and the ability to study geological sections under high-resistivity screens. Among electromagnetic methods, transient electromagnetics (TEM) [
11,
12,
13,
14,
15] and ground penetrating radar (GPR) [
16,
17,
18,
19,
20] are most often used on permafrost. TEM has always been considered as a relatively deep geophysical technique compared to DC methods. In particular, it was proposed to be used for mapping the base of permafrost [
21]. When studying the near-surface part of the section, TEM has a limitation regarding the minimum depth of research (“dead zone”) associated with the influence of interfering transients when the current is turned off in the transmitter loop [
22,
23,
24]. GPR is successfully used on glaciers and solves a number of problems in the study of near-surface horizons in permafrost areas. However, the penetration depth of GPR reduces to the uppermost few meters when clay sediments are present in a section. In addition, GPR data can be adversely influenced by multiple reflections from ice lenses and other heterogeneities in the upper part of the section.
For shallow-depth studies down to 30–50 m, the tensor measurement technique is implemented in radio-magnetotelluric (RMT) sounding, based on the registration of radio-transmitter signals in the frequency range of 10 kHz to 250–1000 kHz [
25], which covers very low frequency 10–30 kHz (VLF), low frequency 30–300 kHz (LF), and medium frequency 300–1000 kHz (MF) signals. However, in remote polar regions, the spectra of the fields of LF and MF radio transmitters are quite limited. For these conditions, a tensor variant of the controlled-source radiomagnetotelluric (CSRMT) sounding method has been developed, which expands the capabilities of the RMT method. The first Enviro-MT system implementing this method was built at the University of Uppsala, Sweden [
26]. Two mutually-perpendicular horizontal magnetic dipoles (HMD, two vertical loops) are used as controlled sources. Enviro-MT equipment has been widely applied to a variety of problems in near-surface geophysics [
27,
28,
29,
30]. A disadvantage of this technology is that it is difficult to generate large moments (the product of the current strength and the area of the loop) of the vertical loop source, reducing the amplitude of the response signal and thus limiting the area of survey without moving the source.
St. Petersburg State University, Russia, and the University of Cologne, Germany, have developed a variant of CSRMT method when two mutually-perpendicular horizontal electrical dipoles (HED, two transmitter lines) are used as sources for tensor measurements [
31,
32,
33]. It is much easier to generate a large moment with such a source, which in this case is the current strength multiplied by the line length.
One of the problems of current interest for the CSRMT method in permafrost regions is detection and contouring of hydrogenic taliks. These objects (unfrozen rock mass surrounded by permafrost) are usually formed as a result of the warming effect of water reservoirs and streams on the underlying ground [
34]. Despite their wide distribution in the permafrost, taliks are still relatively poorly studied. Often there is no reliable information even about their thickness [
14,
35]. Meanwhile, taliks are of interest as indicators of climate change in the Arctic and may serve as a potential source for the water supply in the permafrost areas.
Here, we describe features of the tensor version of the CSRMT method using the developed equipment with the HED sources, and present the results of numerical modeling applied to the problem of identifying and contouring hydrogenic taliks in the permafrost zone.
2. Radiomagnetotelluric and Controlled Source Radiomagnetotelluric Methods
The RMT method uses the electromagnetic fields of remote radio transmitters. The primary field of a radio transmitter is a linearly-polarized wave, in which, at the earth-air interface, the horizontal components of the electrical and magnetic fields are mutually perpendicular. Values of the complex surface impedance (
Z) are determined by measuring horizontal components of the electrical (
EX) and magnetic (
Hy) fields:
Z is then transformed into the apparent resistivity
where
ω = 2
πf,
f is the frequency in Hz,
μ0 = 4
π·10
−7 H/m is the vacuum magnetic permeability (magnetic constant).
The impedance phase (phase difference between
EX and
Hy components) is determined as:
The sounding curves are frequency dependences of
ρa and
φZ; inversion of the latter yields the resistivity section at the observation point. At a distance of several kilometers from a radio transmitter, the measured impedance coincides with the impedance of the vertically-incident plane wave, which depends only on the structure and properties of the underlying half-space. For the plane-wave model, interpretation methods have been developed in detail to ensure reliable sounding results [
1,
2].
The RMT sounding method is most effectively used in populated regions, where it is possible to measure the signals of VLF, LF, and MF radio transmitters in the full frequency range from 10 to 1000 kHz. Usually, the signals of 20–30 radio transmitters are measured with confidence, allowing both the acquisition of sounding curves suitable for the inversion and the derivation of resistivity sections [
31]. In remote regions, such as permafrost areas in the Arctic, only VLF radio transmitter signals can be recorded, allowing use of the profiling technique only. In addition, existing radio transmitters operate at frequencies above 10 kHz, which limits the depth of investigation to 30–50 m, depending on the resistivity of the rocks.
To overcome limitations of the RMT method, the controlled source of the electromagnetic field is used in addition to measuring the signals from remote radio transmitters. Concerning the Enviro-MT equipment developed at the University of Uppsala, the frequency range was extended down to 1 kHz, increasing the depth of investigation to 100–150 m. Two mutually-perpendicular HMDs (two vertical loops) were used as controlled sources [
26]. These sources have a number of advantages: absence of grounding, compactness and ease of installation, and the possibility of implementing tensor measurements with two differently-oriented HMDs. However, the working area of these sources is limited, measurements being possible at a distance from the source not exceeding 600–800 m. This leads to the need to move the source frequently. Furthermore, the Enviro-MT equipment measures the controlled-source field only in a narrow frequency range from 1 to 12 kHz. The need to tune the source in resonance with a load at each emitted frequency limits the survey productivity. The possibility of using subharmonics of the fundamental frequency has not been studied.
St. Petersburg State University, Russia, and the University of Cologne, Germany, jointly with St. Petersburg small enterprises Microkor LLC, Tenzor LLC, Magnetic Devices LLC, and with the Russian Institute for Power Radioengineering, have developed CSRMT equipment that includes a recorder and transmitter allowing operation of the CSRMT method in an extended frequency range of 1 kHz–1 MHz. The frequency range is extended by using as a source a transmitter line several hundred meters long grounded at the ends. This source has a wider working area than an HMD source. Measurements are possible at a distance from the source of up to 3–4 km. Along with the measurements of the signal at the fundamental frequency, signals of subharmonics are measured, increasing the survey productivity. On the other hand, the HMD source does not require grounding, which may be an advantage, particularly during fieldwork in winter.
First surveys by the CSRMT method with an HED source were carried out using the scalar technique. Significant experience has been gained in solving various problems of near-surface geophysics [
31,
32,
36,
37,
38,
39]. In recent years, the tensor variant of the CSRMT method, using two mutually perpendicular HEDs as electromagnetic field sources, has been developed. Examples of bimodal inversion of field data using the tensor modification of the CSRMT method have been reported in our papers [
33,
40].
3. Equipment for the Controlled Source Radiomagnetotellurics
The CSRMT hardware-software complex (
Figure 1) includes a recorder with receiving electrical and magnetic antennas, a transmitter with electrical dipole sources, and data processing and interpretation software tools. The RMT-5 recorder [
31] has five channels for synchronous measurements, with 16-bit ADCs in each channel (two electrical and three magnetic channels). The recorder frequency range is 1–1000 kHz, the built-in memory is 8 GB. The built-in display and keypad allow autonomous field work without having to connect to an external PC, and the built-in power supply provides an operation time of 6–8 h. Measured data are transferred to an external computer via an Ethernet channel. The GPS receiver records the survey coordinates and time. During operation, time series of magnetic and electrical field signals are recorded and stored in the built-in memory. The recorder operates in four frequency ranges: D1 (1–10 kHz, signal sampling frequency
fs = 39 kHz), D2 (10–100 kHz,
fs = 312 kHz), D3 (10–300 kHz,
fs = 832 kHz), and D4 (100–1000 kHz,
fs = 2496 kHz).
Magnetic antennas have a frequency range of 1–1000 kHz, a self-noise level of 25 fT/√Hz, and a transfer factor of the magnetic-induction antenna into a signal voltage of 20 mV/nT. Electrical field measurements can be carried out with grounded and ungrounded (capacitive) receiving lines (2 × 10 m long wires), which allow one to work both in summer and in winter with ice and snow cover, as well as in conditions unfavorable for the grounding of electrical lines (asphalt, concrete, gravel). The compact size of the equipment allows for its use in restrictive areas.
After measurements, a fast Fourier transformation of time series of electrical field EX and Ey (V/m) and magnetic field HX, Hy and HZ (A/m) components is performed, and auto-spectra and mutual spectra of the electrical and magnetic fields and their coherence are calculated. At a coherence level > 0.8, the data are considered suitable for further processing and are used to calculate the apparent resistivity and impedance phase.
The GTS-1 transmitter for the CSRMT method is designed to excite rectangular bipolar pulses in the frequency range of 0.1 Hz–1 MHz, with an adjustable pulse-time ratio to a load with a resistance of 10–1000 Ω. The supply voltage is 220 V; power frequency is 50 Hz. Output voltage is up to 300 V, output current is from 100 mA to 7.5 A, and output power at a load of 100 Ω is up to 1 kW. The transmitter is operated from a control panel or remotely from an external computer.
4. Measurement Technique
When conducting the survey using the CSRMT method, we use an HED source, which is a cable with a length of 400 to 1000 m, grounded at the ends. As noted above, this source is more efficient for the CSRMT method than an HMD source having larger range of coverage, wider frequency range, and the ability to register the main harmonic of the emitted signal and its subharmonics in a wide frequency range.
A finite-length cable source has long been used in the CSAMT method [
3]. The high efficiency of this source is confirmed by many years of experience in applying the CSAMT method in different regions and with equipment from different manufacturers. The experience of using HED in the CSRMT method confirms the efficiency of this type of source.
In the surveys using the CSRMT method with HED, the measurement performance is significantly increased by measuring the signals at the main frequencies and their odd subharmonics. As shown in
Figure 2, at the main signal frequency of 1 kHz, nine odd subharmonics with a coherence level higher than 0.8 are visible in the signal spectra for the electrical and magnetic channels. The spectra shown in this figure were obtained at a distance of 1 km from the HED source, with transmitter-cable length of 200 m. To cover the full frequency range of 1–1000 kHz, three fundamental frequencies are usually used, each being accompanied by 8–12 subharmonics. As a result, high productivity of measurements, about 70–80 sounding stations per day is achieved.
Using the CSRMT method with electrical transmitter lines, it is necessary to use electrodes for the groundings. The installation of the transmitter lines is usually performed once per several days or weeks of surveying, when it is possible to measure electromagnetic fields of the HED source, due to the large operational distance (up to 3–4 km). In the winter season, we use for each grounding several (up to 10–15) electrodes, and the grounding resistance usually does not exceed 100–200 Ω.
For controlled sources including HED, three electromagnetic field zones are commonly introduced: near-field, transition, and far-field zone [
3]. The near-field zone corresponds to the condition |
k|
r << 1, where
k is the wave number of the earth, and
r is the distance from the source to the observation point. For the case of low frequency (quasi-stationary approximation), the near-field zone is introduced via the skin layer thickness
d:
where ρ is the resistivity in Ω·m,
f is the frequency in Hz.
In this case, the above condition for the near-field zone corresponds to the ratio
r/
d < 0.5. In the near-field zone, the alternating electromagnetic field behaves like the DC field. Components of the electrical field depend on the resistivity of the rocks, but do not depend on the frequency. Components of the magnetic field do not depend on either the frequency or the resistivity of rocks. Therefore, near-field impedance measurements cannot be used for frequency soundings. In the transition zone at |
k|
r ≈1 or
r/
d ≈1, the components of the electromagnetic field depend on both the frequency and the coordinates of the observation point. In the far-field zone, with |
k|
r >> 1 or
r/
d > 4–5, the components of the electromagnetic field correspond to the model of a vertically-incident plane wave [
3]. The components depend only on the field frequency and do not depend on the coordinates of the observation point.
Surveys by the CSRMT method are carried out both in the far-field and in the transition zones of the controlled source. It should be noted that measurements in the transition zone make it possible to determine the anisotropy parameters of rocks, such as horizontal and vertical resistivity and anisotropy coefficient [
38].
5. Tensor Measurements
Tensor measurements require registration of an electromagnetic field of different polarizations [
1,
2]. To generate a field with time-varying polarization (rotating field), two alternately-operating and differently-oriented sources are commonly used [
26,
41]. In this case, the transmitter is connected in turn to one then to the other transmitter line. The field registered by the recorder has a different orientation at different times. Time series obtained at the same frequency but with different sources are processed as a single data set.
Apart from sequential connection of sources with the same current frequency, field rotation can be achieved by using currents with slightly different frequencies in each of two transmitters operating simultaneously. In this case, the period of change in the direction of the total field will be proportional to the difference between the periods of current in each transmitter. The total field (both electrical and magnetic) will be elliptically polarized, and the direction of polarization will continuously change in time.
This approach is effective at frequencies below 10 kHz. At high frequencies (above 10 kHz) used in the CSRMT method, the wavelength of the current in the transmitter line hundreds of meters long becomes comparable to or smaller than the length of the line itself. In this case, the amplitude and phase of the recorded field will be affected by the current distribution along the wire, which in turn will be determined by the distributed electrical parameters of the wire, such as linear resistance, capacitance, and inductance. The wave effects that arise in the wire will influence the direction of polarization of the electromagnetic field.
The layout of the field experiment conducted to analyze the polarization of the rotating field is presented in
Figure 3. We have used two transmitters and two mutually-perpendicular lines grounded at the ends. In the first experiment, each line was 200 m long, and in the second experiment the lines were 600 m long.
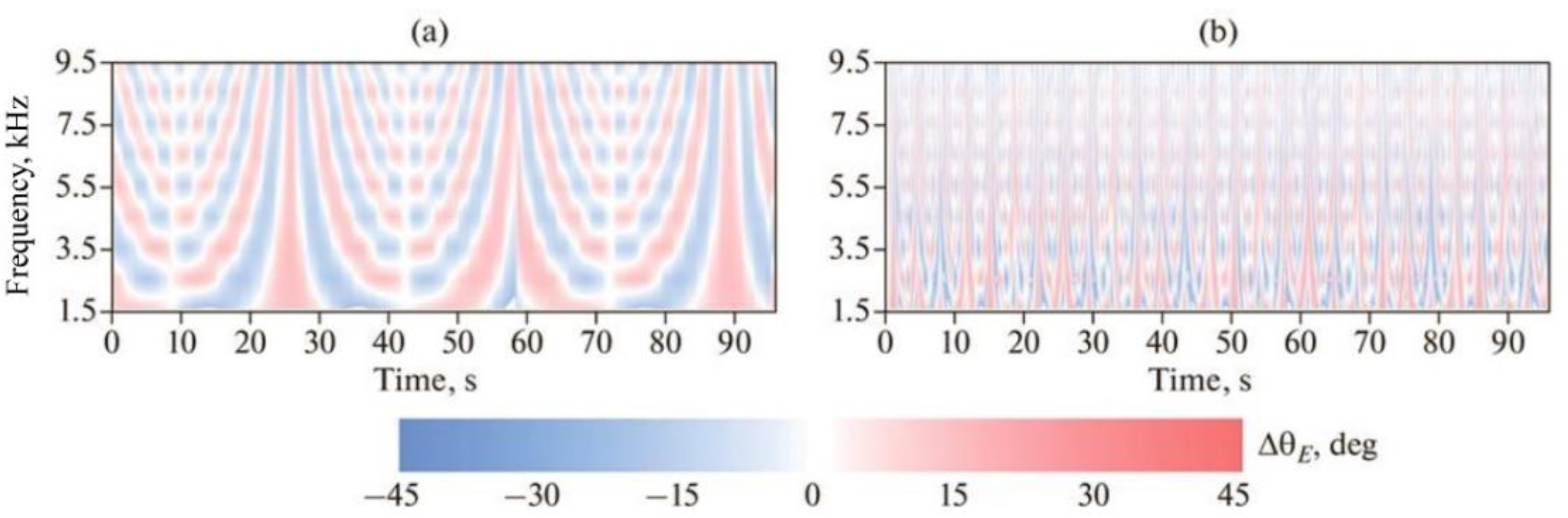
Figure 4 shows dynamic spectra of the parameter ∆θ
E, which is a measure of the deviation of the polarization direction of the electrical field, characterized by angle θ, at a particular moment of time from the average direction of polarization over the entire measurement time. We measured the time series and estimated the directions of electrical field polarization for short realizations. Then we estimated an averaged direction for each transmitter frequency (odd harmonics of the main frequency) over the entire measurement time.
This figure shows how much directions of the horizontal electrical field polarization deviate from a certain averaged direction during the measuring time, i.e., the spatial precession of the direction of horizontal electrical field for different frequencies over time. A small frequency shift between two transmitters, 0.02% for a base frequency of 0.5 kHz (0.5000 and 0.5001 kHz), appears to produce oscillations in the orientation of the horizontal electrical field with an amplitude of ±15–20°. Period of oscillations for a 200-m transmitter lines varies from about 20 s at 1.5 kHz to about 4 s at 9.5 kHz (
Figure 4a). For a 600-m transmitter line, the main oscillation period is about 3 s for all frequencies in the considered range (
Figure 4b). The same properties apply to the magnetic field. This is sufficient for the use in tensor measurements.
6. Modeling of Taliks in Permafrost Regions
We present here an assessment of the possibility of detecting and contouring hydrogenic taliks based on the data of numerical modeling. A two-dimensional model of a sub-lake talik is assumed (
Figure 5). Under the lake with depth ranging from 2 to 6.5 m and water resistivity of 120 Ω·m, there is a zone of thawed sedimentary rocks with a maximum thickness up to 18 m and resistivity of 30 Ω·m. Surrounding frozen rocks have resistivity of 1000 Ω·m. This model is representative for arctic thermokarst lakes [
42,
43,
44,
45].
The synthetic field generation system consists of two perpendicular HEDs. The first dipole is directed along the x axis, and the position of the measurements profile corresponds to the equatorial area of the source. The second dipole is directed along the y axis, and in this case the profile is in the axial area of the source.
The sounding stations are located along the profile with a separation of 10 m. The nearest station, with number 00, is located at a distance of 3 km from the source. In total, there are 31 sounding stations in a 300 m long profile.
The modeling has been performed for 18 frequencies evenly distributed on a logarithmic scale in the range of 1–1000 kHz. For the selected talik model and measurement geometry, the field of the dipole directed along the x-axis corresponds to the TE mode, and the field of the dipole directed along the y-axis corresponds to the TM mode. At the lowest frequency of 1 kHz, the thickness of the skin layer for a half-space with a resistivity of 1000 Ω·m is approximately 500 m. Therefore, we can assume that the position of all sounding stations on the profile corresponds to the ratio r/d = 6 or, in other words, to the source far-field zone [
3].
To obtain synthetic 2D data in the source far-field zone, the MARE2DEM software [
46] has been used. Two-dimensional inversion of synthetic curves of apparent resistivity and impedance phase has been carried out using the ZondMT2D software [
47]. When only curves of the TM mode are used, an anomalous object, the talik, is identified, but its contour is not determined exactly (
Figure 6a). From the inversion of the TE mode, the contour of the talik has been determined more accurately; however, its shape relative to the model is somewhat distorted and resistivity of the host medium under the talik is overestimated up to 5000–7000 Ω·m (
Figure 6b). The most reliable result with good correspondence of the shape and properties of the anomalous object to the original model was obtained by bimodal inversion using CSRMT curves of TM and TE modes (
Figure 6c).
From the analysis of the experience in application of different electrical and electromagnetic methods and results of numerical modeling, we can conclude that the CSRMT method has good prospects for application in the Arctic regions to study the structure and properties of frozen rocks, determine the depth of seasonal thawing, monitor the dynamics of permafrost degradation, identify and contour lenses of underground ice and taliks, map ice wedges and cryopegs, and control soil and groundwater pollution in the sensitive permafrost ecosystem. Frozen strata are characterized by high spatial heterogeneity that can be better resolved by tensor soundings using both TM and TE modes of the electromagnetic field. Data obtained by the CSRMT method can be used during planning and construction of oil and gas facilities in permafrost regions, of the infrastructure of the ports at the Northern seas, and for tracing linear industrial objects in the North (oil and gas pipelines, power lines, railways and roads).
7. Conclusions
The features of the CSRMT tensor system using two differently directed HEDs (transmitter lines) as sources are considered. Compared to a previous variant of the CSRMT method with two multidirectional HMDs (vertical loops), realized in the Enviro-MT system, the proposed technique has a number of advantages. It has an extended frequency range of 1–1000 kHz compared to 1–12 kHz of the old system, greater operational distance, (up to 3–4 km, compared to 600–800 m), and the ability to measure the signal of the main frequency and its subharmonics. Nevertheless, HMD still has its advantages in that loop sources do not require grounding, which is especially important during winter fieldwork.
Technical parameters of the developed CSRMT system, which is used for realization of tensor measurements, are described. To implement tensor measurements, a technique of creating time-varying polarization of electromagnetic field (rotating field) has been developed. It is based on the use of two mutually perpendicular HEDs and two transmitters simultaneously operating with a slight frequency shift (below 10 kHz) or at the same frequency (above 10 kHz). This technique makes it possible to obtain, within a shorter measurement time, results similar to the results of tensor measurements based on a sequential switching of two perpendicular HEDs, and to process data as a single time series.
The numerical modelling was performed for one of the common objects in permafrost areas—a sub-lake hydrogenic talik, which can be studied using the new tensor CSRMT system. We considered a 2D model of talik and obtained synthetic CSRMT curves for TM and TE modes. Upon inversion of TM curves, we found that the talik was identified, but its borders were not determined exactly. The inversion of TE curves allows the creation of a more accurate contour of the talik; however, its shape compared to the model was somewhat distorted, and resistivity of the host medium under the talik was overestimated. The most reliable result with good correspondence of the shape and properties of the talik to the initial model was obtained by bimodal inversion using curves for both TM and TE modes. The numerical modelling confirmed the expected conclusion about the necessity and relevance of CSRMT tensor measurements in permafrost areas.
According to the analysis of applications of different electrical and electromagnetic methods in permafrost regions, the prospects for the use of the CSRMT method are highlighted. The possibility of working with a bimodal electromagnetic field is an important advantage of CSRMT compared to other electrical prospecting methods employed in the Arctic.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}





