1. Introduction
Road accidents are increasing every year in Pakistan. According to data published by the WHO, road fatal injuries reached 28,170 in 2020 [
1]. Non-fatal injuries also occurred. The number of injuries is large and alarming. Its causes include ignorance of traffic rules, disobeying traffic lights, improper maintenance of roads and service roads, busy traffic, an exponential increase of vehicles, speedy drivers, carelessness of pedestrians, wrong way traffic, sense less road crossings and vehicle parking, minimum use of pedestrian bridges by pedestrians and many other factors stated in the literature. Regardless of these reasons, the major reason is distracted driving. A distracted driver in one who diverts his attention from the road, usually to read/send a text message or talk on the phone. The same reasons are responsible for pedestrian fatalities. Pedestrians who listen to music, text messages, make calls or wear headphone often can’t alert themselves by horns or warnings from the drivers [
2].
Speeding is one high risk factor. Drivers and riders usually ignore the speed limits and drive 10 or 20 mph over the limit or sometimes over 30 mph against the limit defined. Running through red lights increases the risk of fatalities and injuries as they often cause side-impact crashes at high speeds. In our country, we have a prominent presence of enthusiastic teenagers as well. Underage drivers on the road, due to their lack of experience and talent for multitasking while driving, usually end up in road accidents. Roadside ditches, a lack of road maintenance and reconstruction, invisible board signs, patches and bumps, vehicle parking on busy roads, sudden U-turns and lane changings confuse the drivers and shakes their confidence [
3]. When such controllable factors are ignored, many accidents and injuries occur, which could be avoided easily. The above reasons for accidents are easily avoided if notifications are transmitted and received by vehicles or, in simple words, communicated by vehicles.
The unsignalized intersection is another challenging and complex situation for the drivers to handle due to multiple roadways. The opposite oncoming traffic and random vehicular movements create bottlenecks at intersections and play a key role in the network dynamics. To resolve conflicts between chaotic flows, a smooth switching process should be implemented for better coordination while optimizing network performance [
4]. In a study, Ref. [
5] has proposed an appraisal of feasibility of safe passage of unsignalized road intersections under varying conditions. He proposed an algorithm that transmits one vehicle’s information to nearby vehicles via Dedicated Short-Range Communication (DSRC). The minimal distance between the cars is predicted, and then a warning message is broadcasted to alert drivers.
Wrong Way Driving (WWD) is a serious major reason for fatalities. Due to wrong way driving, the time to make a decision by the driver is reduced. Roadways with no physical separation and no control are more likely to be associated with WWD crashes [
6]. The ideology of “signal-free road” fantasize driver and he enjoy driving. This concept, on the one hand, helps drivers reach their destination faster, but on the other hand, drivers make U-turns at a large distance. This distant U-turn along with high traffic and higher fuel prices provoke drivers to opt for the wrong side. For many locations, such crashes are found more likely to be intentional. Fixing improved signage by the roadside, physical separations and installing traffic control devices at such locations are possible countermeasures.
Among the drivers, bus and truck drivers are another significant category to be discussed. Pakistan has a rich number of truck drivers, and the impact of their socio-cognitive (attitude) behavior has been studied in the past. Among human factors, the driver’s behavior (what he chooses to do) has a much greater influence on safety than the driver’s performance (what he can do). According to a study [
7], truck drivers’ attitude and prevailing social norms both have a positive significant effect; while the work safety climate has a negative impact on their risky driving behavior.
Road safety is a rising concern among all cities of Pakistan including Karachi. The use of mobile phones is very common among drivers while driving and pedestrians while crossing/walking on road. Many lives suffer due to this dangerous practice. Technology, such as Wi-Fi, 4G, 5G and the Internet of Things (IoT), can bring improvement in road safety if utilized positively in a Vehicle-to-Vehicle (V2V) communication system.
2. Literature Review
Wrong Way Driving (WWD) crashes encompass complex interactions among opposite vehicles, roadway geometry and rush hour, and the effect of these intersections is hardly measurable. Serious fatalities occur when a driver enters via exit ramps or wrong way traffic. Many authors have considered WWD for US roads. Ref. [
8] has evaluated the severity of injuries of over 15 years of crash data by using a random parameter ordered probit model and concluded that driver age, time of day, airbag status, lighting condition and the type and age of vehicle are significant factors that severely contribute to WWD crashes. Ref. [
9] has applied two advanced Machine Learning (ML) models: the XGBoost model and AE-based DNN to identify local and global factors contributing to high-risk roadway segments for WWD crashes. The dataset is divided into 80% and 20% for the training and testing data, respectively. Its survey shows that more frequent crashes are recorded in mid-night hours and in the evenings of weekends. The result shows the XGBoost model performed 90% efficient. Ref. [
10] has done an analysis on 19 variables, among which the severe crashes were recorded during the mid-night time frame and on weekends. WWD is notorious for its severity rather than frequency.
Unsignalized intersections also result in numerous injuries as the traffic can be coming from any direction and may divert to any other direction. Ref. [
11] has suggested a distributed conflict-free cooperation to stabilize the virtual platoon for connected vehicles at unsignalized intersections. He has considered a typical 4-leg, 1-lane unsignalized intersection. Vehicles in a same lane follow the first-in-first-out (FIFO) scheme and can turn left, go straight and turn right, making 12 potential flow movements. Two-dimensional vehicle movement is transformed to a 1-dimensional virtual platoon in a virtual lane by adopting the rotating projection method. The study is limited to the vehicles moving in a straight lane, and overtaking is not considered. Ref. [
12] has presented a global coordination scheme for automated vehicles at an intersection, which uses a model predictive control framework to acquire the vehicle optimal trajectories considering the cross-collision risks.
The heterogeneous scheme is the integration of multiple technologies for vehicular communications. The modes of communication may be a mobile cellular network, DSRC, Wireless Access for Vehicular Environment (WAVE), Long Term Evaluation (LTE) technology for vehicular networking and Vehicular Ad hoc Networks (VANETS). Ref. [
12] has suggested another heterogeneous vehicular network that integrates cellular networks with DSRC for V2I (Vehicle-to-Infrastructure) communication. The integration consists of vertical handover, data decimation and collection, gateway selection, network selection with effective Quality of Service (QoS), vehicular cloud computing vs vehicular fog computing and security of vehicular communication. Since a heterogeneous scheme consists of multiple technologies, the smooth handing over of the data from one technology to other is highly challenging. Additionally, routing protocols, mobility, positioning and video on demand are other issues making the heterogeneous approach complicated and unreliable.
As compared to intersections, the roundabouts are safer as all the vehicles are driving in a clock-wise direction at relatively lower speeds due to the curvature. Intersections where roundabouts cannot be constructed, such as in front of the NED university gate because the space is too small, traffic can come in any direction and has been a busy point throughout the day particularly in the morning and evening hours. In all such areas where traffic meets unsignalized intersections, the virtual trajectory concept can be implemented.
3. Methods
The roads of Karachi are always busy with haphazard traffic and hasty drivers. One of them is the University Road covering a length of 6.67 km. The road is a divided arterial, 3-lanes broad on average and bears high density traffic throughout the day. The rush hours are 6:00 am to 10:00 am and 4:00 pm until 10:00 pm. The road surface condition is mixed throughout its entire length, where some have ditches and pot-holes and some are smooth and maintained. Driving on the smooth and clear road is enjoyable and relaxing. However, it has disadvantages of having fast vehicles irrespective of speed limits. The road has no traffic signals, thus making it a signal-free corridor. The drivers on the fast lane find minimum disruptions and may cover this long road within 15 min. The road has many intersections like New Town, Civic Center, Bait-ul-Mukarram Mosque, Metro Cash and Carry, NED University and Karachi University gates, Mosamyat intersection and Safora intersection. One of such congested point is our case study, that is, NED University Student’s gate.
3.1. Road Infrastructure
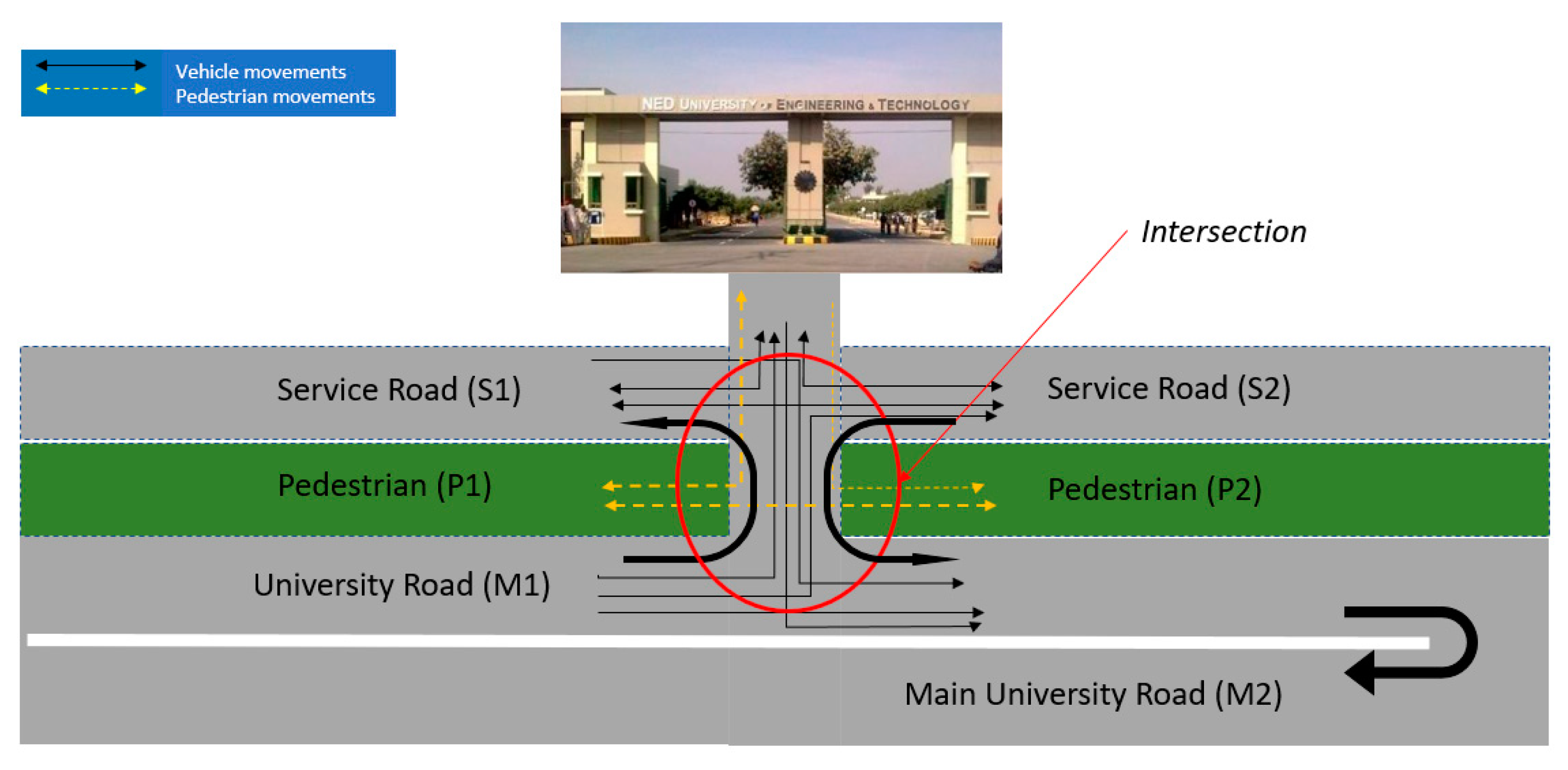
The student gate of NED University has multidirectional lanes and is highly populated. The road includes heterogenous traffic including bikes, auto-rikshaws, private cars, vans and shuttle points. In addition to vehicles, the road is always busy with a lot of students and peddlers around. The road of Main Gate is mapped as two service roads and the Main Road as shown in
Figure 1. The service road allows two-way mobility, whereas, the main road is one-way across the median. One pedestrian bridge is also constructed and is stepped down between the main road and service road; therefore, the pedestrian movement is continuous in this area. This location is often populated with pedestrians and vehicles with random, uncertain and abrupt movements.
The service roads are labelled as S1 and S2, the footpaths are labelled as P1 and P2 and the main University Road is labelled as M1 and M2. The possibilities of vehicle movement are defined in detail with the help of arrows.
3.1.1. University Gate (G)
NED University has two main gates, one for entry and one for exit. A vehicle coming out of the university may have three exits. The vehicle may turn right (towards S1), go straight to main road (M1) or turn left (towards S2). Similarly, a vehicle may enter to Gate (G) from any of three directions S1, S2 or M1, thus making six possible mobilities.
3.1.2. Service Roads (S1 and S2)
S1 and S2 are two service roads facing university gate. S1 has three entering and three exit possibilities. A vehicle on S1 needs an exit, and the vehicle may turn left (towards gate G), may turn right (towards Main road M1) or go straight (S2). Furthermore, any vehicle from either road may have an entrance to S1. Similarly, the vehicle on S2 may have exits to G, S1 and M1, while any vehicle entering to S2 can be coming from either road. Each service road has six possibilities at any instant of time.
The vehicles on S1 or S2 has one more direction probability, i.e., the reverse direction. If the vehicle decides to go in reverse and a vehicle is coming in the same direction behind him, the distance between the two decreases, and the decision time taken by the driver also runs short.
3.1.3. Main Road (M1)
The main University Road is broad and busy every time. Heavy traffic travels throughout the day. The rush hours are 6:00 am to 10:00 am in the morning and 01:00 pm to 3:00 pm in the day time and 5:00 pm until 9:00 pm in the evening. The traffic is heterogeneous in nature, including private cars, auto-rikshaws, bikes, buses and shuttle points are moving throughout the whole day. Intercity coaches and trucks are other heavy traffic travelling on the main road. Traffic may exit M1 by diverting to G, S1 or S2, and similarly, traffic from these three roads may have an entry to M1 again making six possibilities for each vehicle at any instant. Main roads do not allow traffic to opt for the reverse direction.
If two vehicles are considered, each possibility becomes double for any of the entry or exit options. If the number of vehicles is three at a time, the intersection of them may increase risk factor three times for the drivers. The increase in number of vehicles drastically increases the accidental risk. At this sensitive intersection point, if any driver even for a microsecond behaves carelessly or ignores any of the moving traffic, many fatalities and injuries may occur.
Figure 2 summarizes the entrances and exits of vehicle in all four stated roads. Each filled box indicates the possible entries or exits from certain roads about the specific Road Name (G, S1, S2 or M1). The empty box indicates that this vehicular movement is not possible. The reverse column indicates that the service road has allowed mobility in the reverse direction while Gate and Main Road do not.
A pedestrian who decides to move from students’ gate towards university road can turn on any service road, may move across the university gate or may walk straight on the footpath or take steps to the bridge. A single pedestrian has four possible exiting directions. If there are two pedestrians, the exiting direction possibilities becomes double. Thus, the probability of crashes at an intersection increases when more than three vehicles or pedestrians are involved.
3.2. V2V Communication
The potential solution to ensure road safety in such complex traffic conditions on the specific road geometry, as discussed in the previous section, is the implementation of V2V communication. With this type of technology, different vehicles can communicate with each other and identify any potential safety issues. The safety conditions can be grouped into the following three scenarios:
Safety condition under the existing scenario,
Safety condition improvement under one-way communication, and
Safety condition improvement under V2V communication.
Implementation of V2V communication includes several points of interest to declare and develop, starting from the protocol design to obtain a standard communication model and going through the performance evaluation to have stable key points Indicators (KPIs) [
13]. Urban environments are complex and highly dynamic. Pathloss, coherence times, doppler spectrum and etc. are very difficult to find when a vehicle moves. Safety applications rely on reliable beacon exchange [
14]. There are some challenges in it that will be resolved with time.
4. Case Study of NED University Student Gate
This section provides the discussion on the three scenarios presented in
Section 3.2. To understand the traffic condition on the selected site, consider the movement of three vehicles indicated by blue, black and green arrows as shown in
Figure 3. The green vehicle is exiting G and is turning towards S1, the lack vehicle is moving straight from S2 to S1 and the blue vehicle is entering to G from M1. The red circle indicates the conflict point where the three vehicles are intersecting with each other.
The following are the possible division of decisions in this particular traffic situation:
Green, while turning, may intersect the blue’s path. Green needs to calculate the time interval of blue to have safe turning before or after. Green also needs to slow or increase its speed while turning with respect to blue’s acceleration. Green needs to inform blue about its next move by lighting on the indicator. Another quick decision needs to be made by black because it is also crossing the intersection while moving from S2 to S1.
Blue vehicle coming from M1 moves towards G. At the unsignalized intersection (red), blue might intersect with green and black. Blue has to make a quick decision for the other two vehicles about their speed, time and direction.
Black is moving in a straight path from S2 to S1; and again, at the red intersection, black has to make a decision about its own position and speed and about the other vehicles at the same time.
Blue and green follow a curved path since they have an advantage of being at a slow speed. Black is travelling in a straight path, so its speed is probably a little higher than the other two. Thus, the variety of the three speeds makes the decision complex.
Black crosses the intersection and comes into the same lane with green on S1. Two vehicles moving in a same lane may overtake each other. The car following the front vehicle greatly depends on other decisions as the vehicle at the back does not have a clear road idea because of the front vehicle.
The intersection addressed above involves pedestrian movements as well. These movements are unpredictable because one pedestrian may start moving or may suddenly stop his movement on and across the road at any time. He may rotate 180° and start walking in an opposite direction. He might be busy on a phone with texts messages and ignores surrounding vehicles. All the above creates a very risky situation in which vehicle-to-vehicle or vehicle-to-pedestrian road crash may occur. Improvement in safety at such locations is possible. The degree of intervention will govern the benefits in terms of safety improvement as discussed with respect to the three scenarios in the subsequent sections.
4.1. Safety Condition under Existing Scenario
The possible conflicts that may arise under the given scenario are between:
Vehicle exiting from G and turning right on service road with vehicle moving straight on service road.
Vehicle exiting from G and turning left on service road with vehicle moving straight on service road.
Vehicle exiting from G and turning left on university road with vehicle moving straight on university road.
Vehicle entering into G by turning left from university road with vehicle moving straight on service road.
Vehicle entering into G by turning right from service road with vehicle turning left from university service road.
Vehicle entering into G by turning right from service road with vehicle turning left from service road.
Wrong Way Vehicle entering into G by turning left from university road with vehicle exiting from G.
Wrong Way Vehicle entering into G by turning left from university road with vehicle turning left from service road.
Vehicle exiting from G and turning right on service road with pedestrian moving straight on service road.
Vehicle exiting from G and turning left on service road with pedestrian moving straight on service road.
Vehicle entering into G by turning left from university road with pedestrian moving straight on service road.
Vehicle entering into G by turning left from service road with pedestrian moving straight on service road.
Vehicle entering into G by turning right from service road with pedestrian moving straight on service road.
Wrong Way Vehicle entering into G by turning left from university road with pedestrian moving straight on service road.
Thus, any of the 14 possible road crashes stated above may occur if the driver does not account for the vehicle or pedestrian moving in its path while making the maneuver. With an increase in the number of vehicles exiting or entering G, the risk of a road crash will increase. If no control or assistance is provided, whether in the form of manual traffic control through traffic constables or security guard or in the form of driver assistance through V2V communication, the chances of road crashes will remain high.
4.2. Safety Condition Improvement under One-Way Communication
For the 14 types of conflicts stated in the previous section, the chances of a road crash can be reduced through communication with the driver. This kind of communication is primarily related to information provided to the driver about the vehicles or pedestrians moving in its path. Such information could be communicated through a Wireless Sensor Network (WSN) approach. It consists of vehicular client and infrastructure waypoints capable of detecting road safety hazards. The design of an IoV system for road safety consists of an embedded system mounted on the vehicle comprised of a power module, sensor module, control module and communication module as shown in
Figure 4.
The power module receives 12 V from car outlet and provides 3.3 V to all modules. The sensor module uses Light Detection and Ranging (LiDAR), Ultrasonic Sensors (US) and InfraRed (IR) sensors for positioning and locating objects, determining dimensions and selecting objects. The car is equipped with an array of sensors and an accelerometer for continuous detection and accuracy as the car is itself in motion. An accurately configured GPS module is required to obtain the location of sharp turns at intersections. The inertial measurement unit is responsible for outputting the direction of the vehicle. The control module is responsible in managing data that is received and outputted from the device. It consists of a microcontroller that processes the data obtained from the sensor module and provides the distance, time, velocity and location measurements. Communication between vehicles is performed using a medium-range radio frequency communication module via stable technologies such as Wi-Fi or a cellular network. Even under one-way communication, considerable improvement in road safety can be achieved by alerting the driver about the possible hazards.
4.3. Safety Condition Improvement under V2V Communication
In a two-way communication scenario, the vehicles can talk to each other with the help of the embedded system shown in
Figure 4. The following are some safety improvements that can be achieved through V2V communication:
Emergency Electronic Brake Lights (EEBL): The Emergency Electronics Brake Lights (EEBL) safety application can notify the driver about the hard-braking vehicle in the path ahead. Multi-vehicle collisions can be avoided through this application as the drivers of preceding vehicles travelling in the same lane can be warned about the hard breaks applied by the vehicles travelling ahead.
Forward Collision Warning (FCW): If the front vehicle reduces its speed, the following vehicles will be informed via a safety warning and prevents forward collisions.
Intersection Movement Assist (IMA): At unsignalized intersections, the movements of vehicles and pedestrians are random and unpredictable. In this complex system, correct decisions are highly observational and rapidly time dependent. A reliable solution is that vehicles and pedestrians are equally informed via warning notifications.
The Blindspot/Lane Change Warnings: This safety application will inform the driver about other vehicles or pedestrians moving into their blind spot.
Do not Pass Warning (DNP): This safety application warns pedestrians and drivers of their next move. They will be informed to remain stopped or apply the brakes if vehicle movement is unsafe.
Turning Assistant (TA): The drivers/pedestrians could be informed about other turning vehicles far before they actually turn.
DSRC is an effective method to achieve V2V communication for the above applications. It is a short- to medium-range system, typically around 1 km, that permits the transmission of critical information using a predefined band reserved for road safety and vehicle protection. The advantages of DSRC are: privacy and security, safety programs prioritization, flexibility, high accuracy, low latency, flexibility and certified bandwidth [
15].
5. Conclusions
The future of transportation is Connected Vehicles. If vehicles keep broadcasting their information, the cellular system will timely notify all road users. DSRC along with the cellular network is a good strategy to provide road safety at unsignalized intersections. This heterogenous scheme is very much facilitating and can be replicate at each intersection. The major challenges to the deployment of V2V includes: defining the management and technical structure of the communications-security system, addressing privacy issues, potential unique liability matters and human factor concerns. The major outcome of this research is road safety for drivers and passengers for any sudden wrong moving vehicles or any uncertain situations that could be prevented otherwise. V2V communication will bring safety, security protocols, positioning and scalability deploying Intelligent Transportation System with socio-economic and national advancement. Mobile application will benefit passengers and anyone moving around and for visibly impaired individuals by voice notifications.
Author Contributions
Conceptualization, methodology, writing—original draft preparation, writing—review and editing, A.A. and B.A. All authors have read and agreed to the published version of the manuscript.
Funding
This research received no external/internal funding.
Institutional Review Board Statement
Not applicable.
Informed Consent Statement
Not applicable.
Data Availability Statement
Not applicable.
Acknowledgments
The authors acknowledge the comments and suggestions of the anonymous reviewers that helped improve this article.
Conflicts of Interest
The authors declare no conflict of interest.
References
- World Health Rankings. Available online: https://www.worldlifeexpectancy.com/pakistan-road-traffic-accidents (accessed on 20 January 2023).
- Liu, Z.; Pu, L.; Zhu, K.; Zhang, L. Design and evaluation of V2X communication system for vehicle and pedestrian safety. J. China Univ. Posts Telecommun. 2015, 22, 18–26. [Google Scholar]
- Causes of Road Accidents in Pakistan. Available online: https://www.pakistangulfeconomist.com/2020/08/31/causes-of-road-accidents-in-pakistan/ (accessed on 20 January 2023).
- Tachet, R.; Santi, P.; Sobolevsky, S.; Reyes-Castro, L.I.; Frazzoli, E.; Helbing, D. Revisiting street intersections using slot-based systems. PLoS ONE 2016, 11, e0149607. [Google Scholar] [CrossRef] [PubMed]
- Ahrem, J. Appraisal of Feasibility of Using Vehicle-to-Vehicle Communications for Safe Passage of Unsignalized Road Intersection under Varying Conditions. In Proceedings of the IFAC Conference on Programmable Devices and Embedded Systems, Velke Karlovice, Czech Republic, 25–27 September 2013. [Google Scholar]
- Das, S.; Avelar, R.; Dixon, K.; Sun, X. Investigation on the wrong way driving crash patterns using multiple correspondence analysis. Accid. Anal. Prev. 2018, 111, 43–55. [Google Scholar] [CrossRef] [PubMed]
- Hussain, G.; Batool, I.; Kanwal, N.; Abid, M. The moderating effects of work safety climate on socio-cognitive factors and the risky driving behavior of truck drivers in Pakistan. Transp. Res. Part F 2019, 62, 700–715. [Google Scholar] [CrossRef]
- Jalayer, M.; Shabanpour, R.; Rouholamin, M.P.; Golshani, N.; Zhou, H. Wrong-way driving crashes: A random-parameters ordered probit analysis of injury severity. Accid. Anal. Prev. 2018, 117, 128–135. [Google Scholar] [CrossRef] [PubMed]
- Ashraf, M.T.; Dey, K.; Mishra, S. Identification of high-risk roadway segments for wrong-way driving crash using rare event modeling and data augmentation techniques. Accid. Anal. Prev. 2023, 181, 106933. [Google Scholar] [CrossRef] [PubMed]
- Ponnaluri, R.V. The odds of wrong-way crashes and resulting fatalities: A comprehensive analysis. Accid. Anal. Prev. 2016, 88, 105–116. [Google Scholar] [CrossRef] [PubMed]
- Xu, B.; Li, S.E.; Bian, Y.; Li, S.; Ban, X.J.; Wang, J.; Li, K. Distributed conflict-free cooperation for multiple connected vehicles at unsignalized intersections. Transp. Res. Part C Emerg. Technol. 2018, 93, 322–334. [Google Scholar] [CrossRef]
- Feng, Y.; Head, K.L.; Khoshmagham, S.; Zamanipour, M. A real-time adaptive signal control in a connected vehicle environment. Transp. Res. Part C Emerg. Technol. 2015, 55, 460–473. [Google Scholar] [CrossRef]
- Zorkany, M.E.; Yasser, A.; Galal, A.I. Vehicle to vehicle communication: Scope, importance, challenges, research directions and future. Open Transp. J. 2020, 14, 86–98. [Google Scholar] [CrossRef]
- Lyu, F.; Zhu, H.; Cheng, N.; Zhou, H.; Xu, W.; Li, M.; Shen, X. Characterizing urban vehicle-to-vehicle communications for reliable safety applications. IEEE Trans. Intell. Transp. Syst. 2020, 21, 2586–2602. [Google Scholar] [CrossRef]
- Zekri, A.; Jia, W. Heterogeneous vehicular communications: A comprehensive study. Ad Hoc Netw. 2018, 75, 52–79. [Google Scholar] [CrossRef]
| Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).


{kind=link}
{kind=link}
{kind=link}
{kind=link}