
Development of an Android-Based, Voice-Controlled Autonomous Robotic Vehicle †

 ,
,
Abstract
:1. Introduction
2. Materials
2.1. Arduino Uno Microcontroller
2.2. Direct Current (DC) Motor
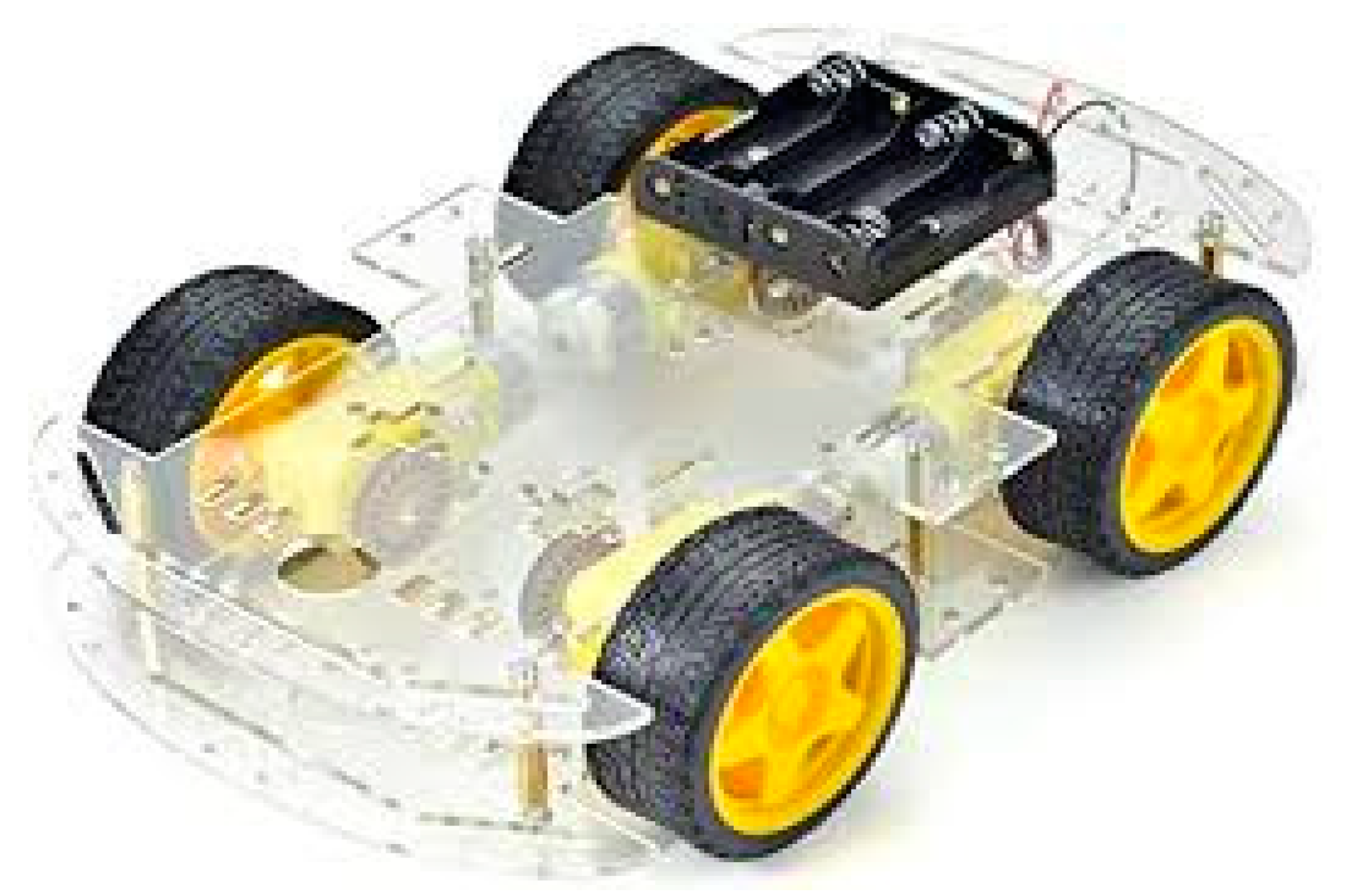
2.3. Four-Wheel Robot Chassis
2.4. Battery
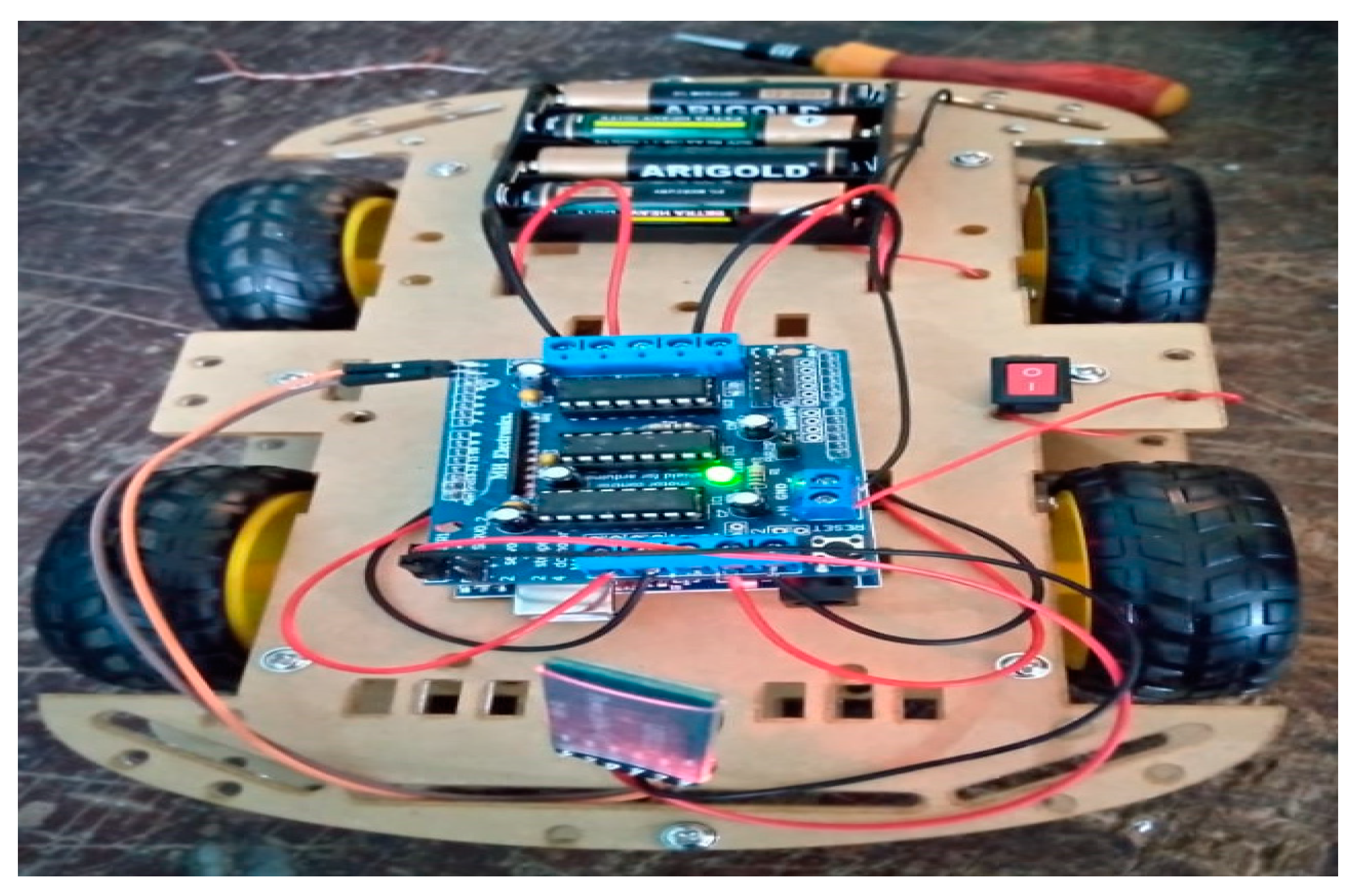
3. Results and Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Rawshan Habib, M.; Sunny, K.; Vadher, A.; Rahaman, A.; Tushar, A.N.; Mossihur Rahman, M.; Rashedul Arefin, M.; Ahmed, M.A. Design and Implementation of Voice Command-Based Robotic System. In Inventive Systems and Control: Proceedings of ICISC 2022; Springer: Berlin/Heidelberg, Germany, 2022; pp. 273–282. [Google Scholar]
- Nayak, S.K.; Hota, S.P.; Behera, S. Voice Controlled Robotic Car. UGC Care Group I J. 2022, 12, 593–598. [Google Scholar]
- Chaudhry, A.; Batra, M.; Gupta, P.; Lamba, S.; Gupta, S. Arduino Based Voice Controlled Robot. In Proceedings of the 2019 International Conference on Computing, Communication, and Intelligent Systems (ICCCIS), Greater Noida, India, 18–19 October 2019; pp. 415–417. [Google Scholar]
- Haruna, Z.; Musa, U.; Mu’azu, M.B.; Umar, A. A Path Planning Technique for Autonomous Mobile Robot. Int. J. Mechatron. Electr. Comput. Technol. (IJMEC) 2020, 10, 4483–4492. [Google Scholar]
- Haruna, Z.; Musa, U.; Mu’azu, M.B.; Umar, A. A Dynamic Path Planning Technique for Autonomous Mobile Robot in Unkwown Static Environment. In Proceedings of the 2019 IEEE 1st International Conference on Mechatronics and Cyber-Physical Computer Systems, Owerri, Nigeria, 7–8 March 2019; pp. 1–6. [Google Scholar]
- Saravanan, D.; Parthiban, R.; Archanaa, G.I. Voice Controlled Robotic Car Using Arduino for Smart Agriculture. Int. J. Pure Math 2018, 118, 2097–2105. [Google Scholar]
- Rashid, H.; Ahmed, I.U.; Osman, S.B.; Newaz, Q.; Rasheduzzaman, M.; Reza, S.M.T. Design and Implementation of a Voice Controlled Robot with Human Interaction Ability. In Proceedings of the International Conference on Computer, Communication, Chemical, Materials and Electronic Engineering, Rajshahi, Bangladesh, 26–27 January 2017; Volume 65, pp. 148–151. [Google Scholar]
- Shalini, A.; Jayasuruthi, L.; VinothKumar, V. Voice Recognition Robot Control Using Android Device. J. Comput. Theor. Nanosci. 2018, 15, 2197–2201. [Google Scholar] [CrossRef]
- Sachdev, S.; Macwan, J.; Patel, C.; Doshi, N. Voice-Controlled Autonomous Vehicle Using IoT. Procedia Comput. Sci. 2019, 160, 712–717. [Google Scholar] [CrossRef]
- Srivastava, S.; Singh, R. Voice Controlled Robot Car Using Arduino. Int. Res. J. Eng. Technol. (IRJET) 2020, 7, 2356–2395. [Google Scholar]
- Gupta, M.; Kumar, R.; Chaudhary, R.K.; Kumari, J. IoT Based Voice Controlled Autonomous Robotic Vehicle Through Google Assistant. In Proceedings of the 2021 3rd International Conference on Advances in Computing, Communication Control and Networking (ICAC3N), Greater Noida, India, 17–18 December 2021; pp. 713–717. [Google Scholar]
- Korti, M.; Shettar, G.B.; Hadagali, G.A.; Shettar, S.; Shettar, S. Voice-Based Direction Control of a Robotic Vehicle through User Commands. Int. Res. J. Adv. Sci. Hub 2022, 4, 51–56. [Google Scholar] [CrossRef]
- Kuriakose, S.; Harshitha, M.M.; Keerthana, D.G.; Adarsh, S.; Harshitha, K. Wireless Voice Controlled Robot. In Proceedings of the 2023 9th International Conference on Advanced Computing and Communication Systems (ICACCS), Coimbatore, India, 17–18 March 2023; Volume 1, pp. 189–194. [Google Scholar]
- Haruna, S.H.; Umar, A.; Haruna, Z.; Ajayi, O.-O.; Zubairu, A.Y.; Rayyan, R. Development of an Autonomous Floor Mopping Robot Controller Using Android Application. In Proceedings of the 2022 5th Information Technology for Education and Development (ITED), Abuja, Nigeria, 1–3 November 2022; pp. 1–6. [Google Scholar]
- Cornejo, J.; Palomares, R.; Hernández, M.; Magallanes, D.; Gutierrez, S. Mechatronics Design and Kinematic Simulation of a Tripteron Cartesian-Parallel Agricultural Robot Mounted on 4-Wheeled Mobile Platform to Perform Seed Sowing Activity. In Proceedings of the 2022 First International Conference on Electrical, Electronics, Information and Communication Technologies (ICEEICT), Trichy, India, 16–18 February 2022; pp. 1–7. [Google Scholar]
- Chakraborty, S.; De, N.; Marak, D.; Borah, M.; Paul, S.; Majhi, V. Voice Controlled Robotic Car Using Mobile Application. In Proceedings of the 2021 6th International Conference on Signal Processing, Computing and Control (ISPCC), Solan, India, 7–9 October 2021; pp. 1–5. [Google Scholar]
- Agwunedu, N.O.; Oshiga, O.; Chizea, L.O.; Oluwafemi, O.A.; Thomas, S. Arduino Based Voice Controlled Delivery System (Robot). In Proceedings of the 2021 1st International Conference on Multidisciplinary Engineering and Applied Science (ICMEAS), Abuja, Nigeria, 15–16 July 2021; pp. 1–5. [Google Scholar]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Vehicle | Appendage | |||
|---|---|---|---|---|
| Command | Right Motor | Left Motor | Arm Motor | Gripper Motor |
| Action | Action | Action | Action | |
| “Backward” | Rotate Anticlockwise | Rotate Anticlockwise | Off | Off |
| “Forward” | Rotate Clockwise | Rotate Clockwise | Off | Off |
| “Right” | Off | Rotate Clockwise | Off | Off |
| “Left” | Rotate Anticlockwise | Off | Off | Off |
| “Down” | Off | Off | Rotate Anticlockwise | Off |
| “Up” | Off | Off | Rotate Clockwise | Off |
| “Close” | Off | Off | Off | Rotate Anticlockwise |
| “Open” | Off | Off | Off | Rotate Clockwise |
| “Stop” | Off | Off | Off | Off |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Umar, A.; Giwa, M.A.; Kassim, A.Y.; Ilyasu, M.U.; Abdulwahab, I.; Agbon, E.E.; Ogedengbe, M.T. Development of an Android-Based, Voice-Controlled Autonomous Robotic Vehicle. Eng. Proc. 2023, 58, 48. https://doi.org/10.3390/ecsa-10-16026
Umar A, Giwa MA, Kassim AY, Ilyasu MU, Abdulwahab I, Agbon EE, Ogedengbe MT. Development of an Android-Based, Voice-Controlled Autonomous Robotic Vehicle. Engineering Proceedings. 2023; 58(1):48. https://doi.org/10.3390/ecsa-10-16026
Chicago/Turabian StyleUmar, Abubakar, Mohammed Abdulkadir Giwa, Abduljalal Yusha’u Kassim, Muhammad Usman Ilyasu, Ibrahim Abdulwahab, Ezekiel Ehime Agbon, and Matthew T. Ogedengbe. 2023. "Development of an Android-Based, Voice-Controlled Autonomous Robotic Vehicle" Engineering Proceedings 58, no. 1: 48. https://doi.org/10.3390/ecsa-10-16026
APA StyleUmar, A., Giwa, M. A., Kassim, A. Y., Ilyasu, M. U., Abdulwahab, I., Agbon, E. E., & Ogedengbe, M. T. (2023). Development of an Android-Based, Voice-Controlled Autonomous Robotic Vehicle. Engineering Proceedings, 58(1), 48. https://doi.org/10.3390/ecsa-10-16026