
Water Leakage Pre-Localization in Drinking Water Networks via the Cosmic-Ray Neutron Sensing Technique †

Abstract
1. Introduction
2. Materials and Methods
2.1. Cosmic Ray Neutron Rover System
2.2. Data Collection and Analysis
3. Results
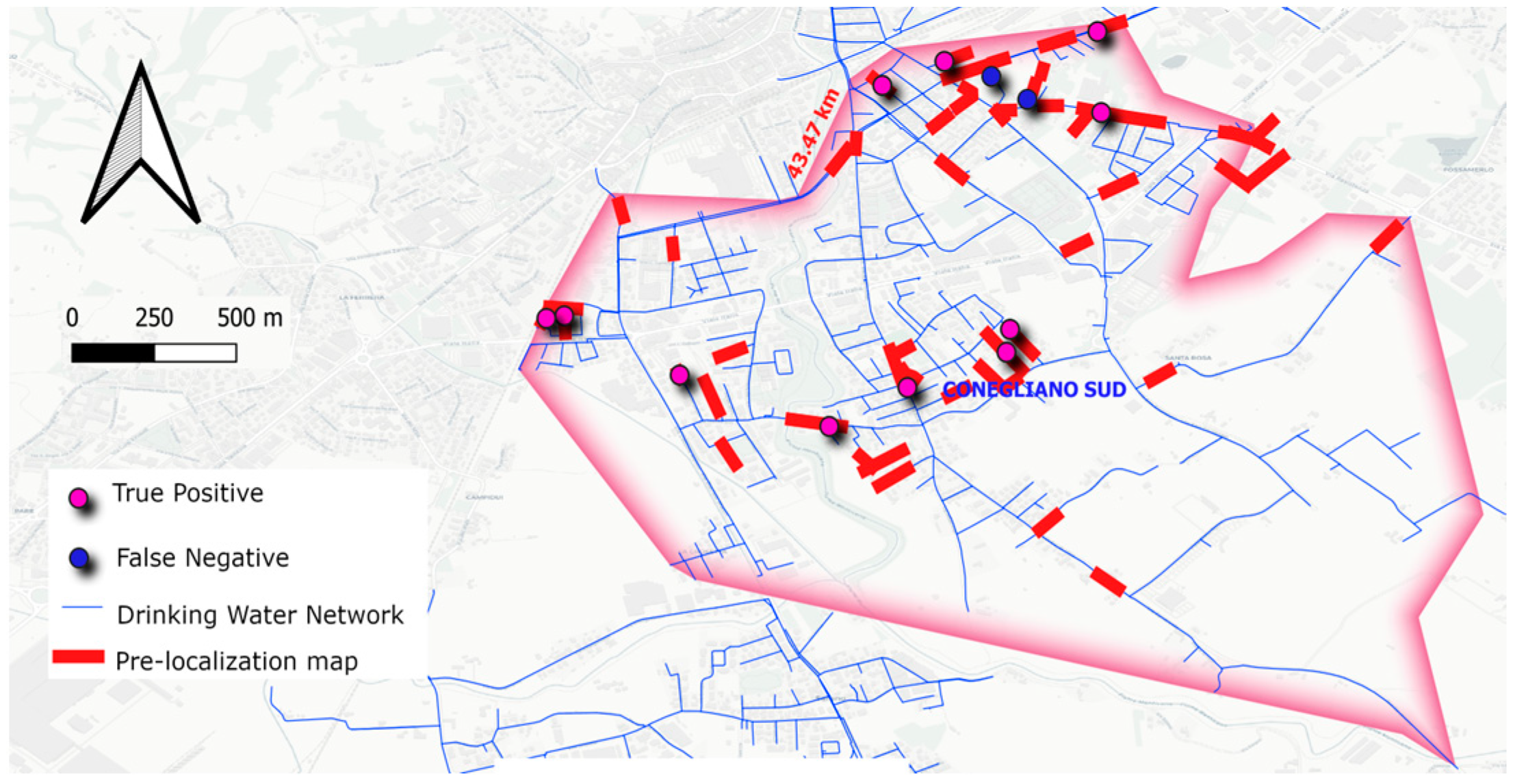
Case Study
4. Discussion
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- El-Zahab, S.; Zayed, T. Leak Detection in Water Distribution Networks: An Introductory Overview. Smart Water 2019, 4, 5. [Google Scholar] [CrossRef]
- Zreda, M.; Desilets, D.; Ferré, T.P.A.; Scott, R.L. Measuring Soil Moisture Content Non-invasively at Intermediate Spatial Scale Using Cosmic-ray Neutrons. Geophys. Res. Lett. 2008, 35, 2008GL035655. [Google Scholar] [CrossRef]
- Schrön, M.; Zacharias, S.; Womack, G.; Köhli, M.; Desilets, D.; Oswald, S.E.; Bumberger, J.; Mollenhauer, H.; Kögler, S.; Remmler, P.; et al. Intercomparison of Cosmic-Ray Neutron Sensors and Water Balance Monitoring in an Urban Environment. Geosci. Instrum. Method. Data Syst. 2018, 7, 83–99. [Google Scholar] [CrossRef]
- Schrön, M.; Oswald, S.E.; Zacharias, S.; Kasner, M.; Dietrich, P.; Attinger, S. Neutrons on Rails: Transregional Monitoring of Soil Moisture and Snow Water Equivalent. Geophys. Res. Lett. 2021, 48, e2021GL093924. [Google Scholar] [CrossRef]
- Stevanato, L.; Baroni, G.; Cohen, Y.; Fontana, C.L.; Gatto, S.; Lunardon, M.; Marinello, F.; Moretto, S.; Morselli, L. A Novel Cosmic-Ray Neutron Sensor for Soil Moisture Estimation over Large Areas. Agriculture 2019, 9, 202. [Google Scholar] [CrossRef]
- Morselli, L.; Gianessi, S.; Mazzoleni, R.; Biasuzzi, B.; Gazzola, E.; Lunardon, M.; Baroni, G.; Stevanato, L. On the Combined Use of Static and Mobile Cosmic-Ray Neutron Sensors for Monitoring Spatio-Temporal Variability of Soil Water Content in Cropped Fields. In Proceedings of the 2023 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Pisa, Italy, 6–8 November 2023; pp. 243–247. [Google Scholar]
- Köhli, M.; Schrön, M.; Zreda, M.; Schmidt, U.; Dietrich, P.; Zacharias, S. Footprint Characteristics Revised for Field-scale Soil Moisture Monitoring with Cosmic-ray Neutrons. Water Resour. Res. 2015, 51, 5772–5790. [Google Scholar] [CrossRef]
- Schiilkop, P.B.; Burgest, C.; Vapnik, V. Extracting support data for a given task. In Proceedings of the First International Conference on Knowledge Discovery & Data Mining, Montreal, QC, Canada, 20–21 August 1995; AAAI Press: Menlo Park, CA, USA, 1995; pp. 252–257. [Google Scholar]

{kind=link}
| Feature | Value |
|---|---|
| Length of the global water network | 43.5 km |
| Length of pre-localized water network | 4.1 km |
| Number of pre-localization spots | 43 |
| True positive | 11 |
| False negative 1 | 2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Morselli, L.; Lorenzi, F.; Basso, A.; Stevanato, L. Water Leakage Pre-Localization in Drinking Water Networks via the Cosmic-Ray Neutron Sensing Technique. Eng. Proc. 2024, 69, 157. https://doi.org/10.3390/engproc2024069157
Morselli L, Lorenzi F, Basso A, Stevanato L. Water Leakage Pre-Localization in Drinking Water Networks via the Cosmic-Ray Neutron Sensing Technique. Engineering Proceedings. 2024; 69(1):157. https://doi.org/10.3390/engproc2024069157
Chicago/Turabian StyleMorselli, Luca, Federica Lorenzi, Andrea Basso, and Luca Stevanato. 2024. "Water Leakage Pre-Localization in Drinking Water Networks via the Cosmic-Ray Neutron Sensing Technique" Engineering Proceedings 69, no. 1: 157. https://doi.org/10.3390/engproc2024069157
APA StyleMorselli, L., Lorenzi, F., Basso, A., & Stevanato, L. (2024). Water Leakage Pre-Localization in Drinking Water Networks via the Cosmic-Ray Neutron Sensing Technique. Engineering Proceedings, 69(1), 157. https://doi.org/10.3390/engproc2024069157