
Hydraulic Transient Data Assimilation in Pipe Networks Using the Kalman Filter †



{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Hydraulic Transient Data Assimilation
2.1. Elastic Water Column (EWC) Model
2.2. Extend Kalman Filter (EKF) for Pressure and Flow Prediction
- Prediction step
- Update step
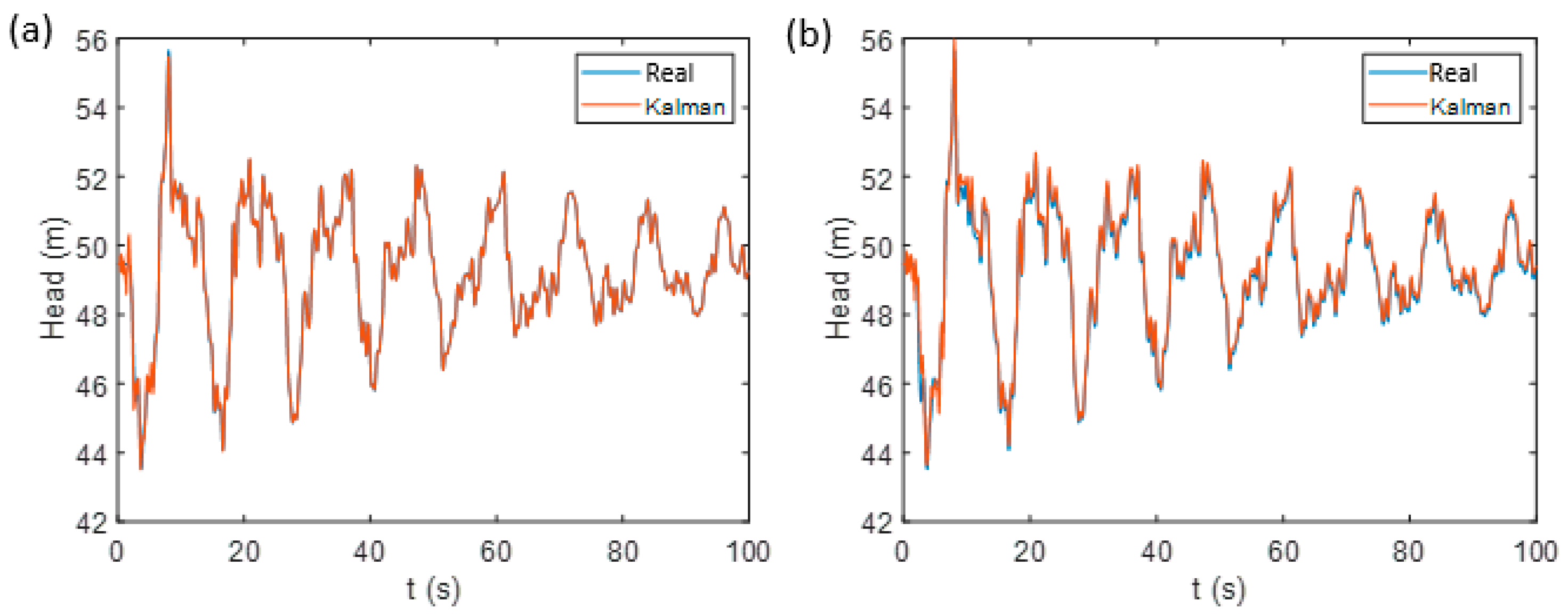
3. Transient Data Assimilation: 7-Pipe Network
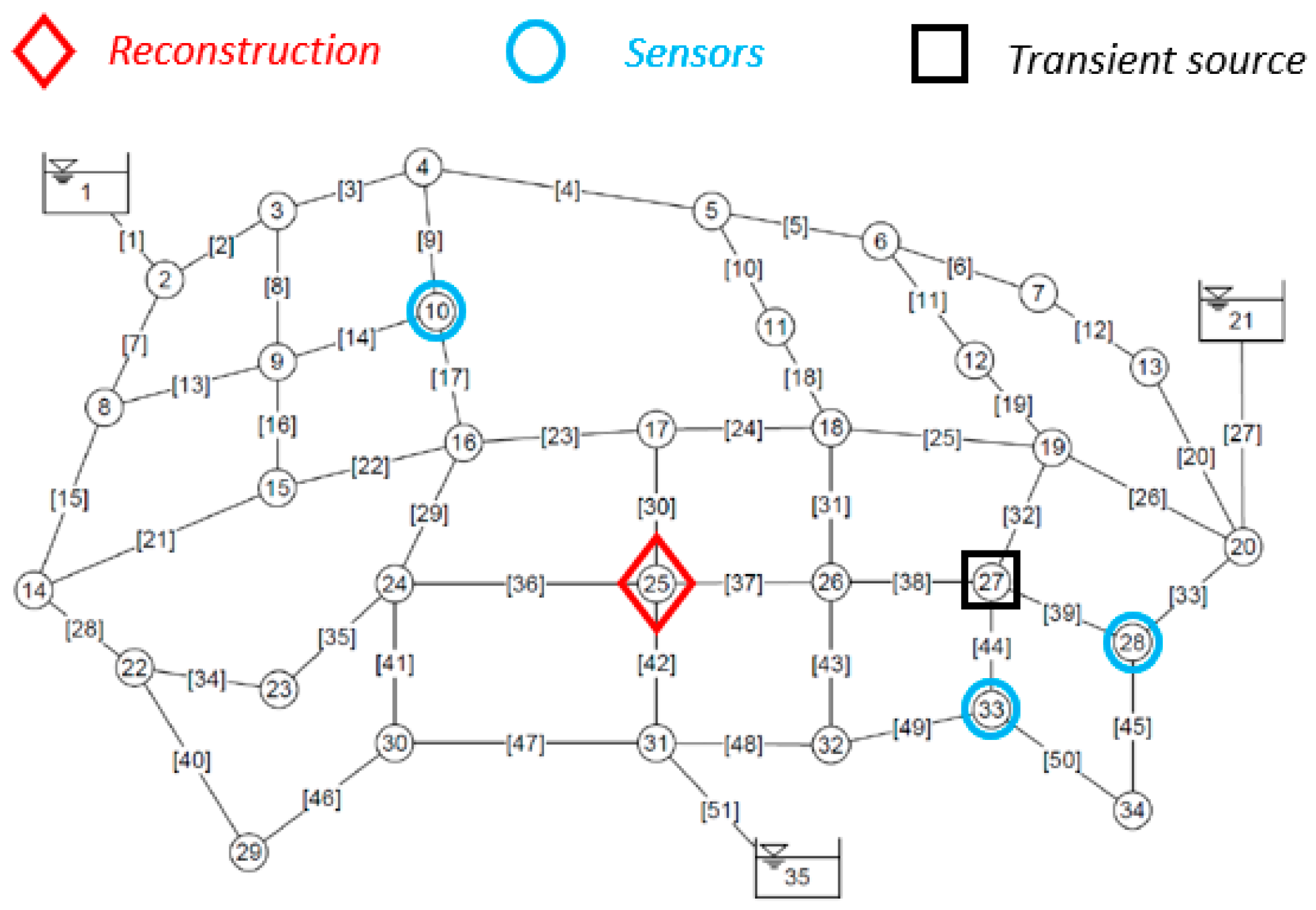
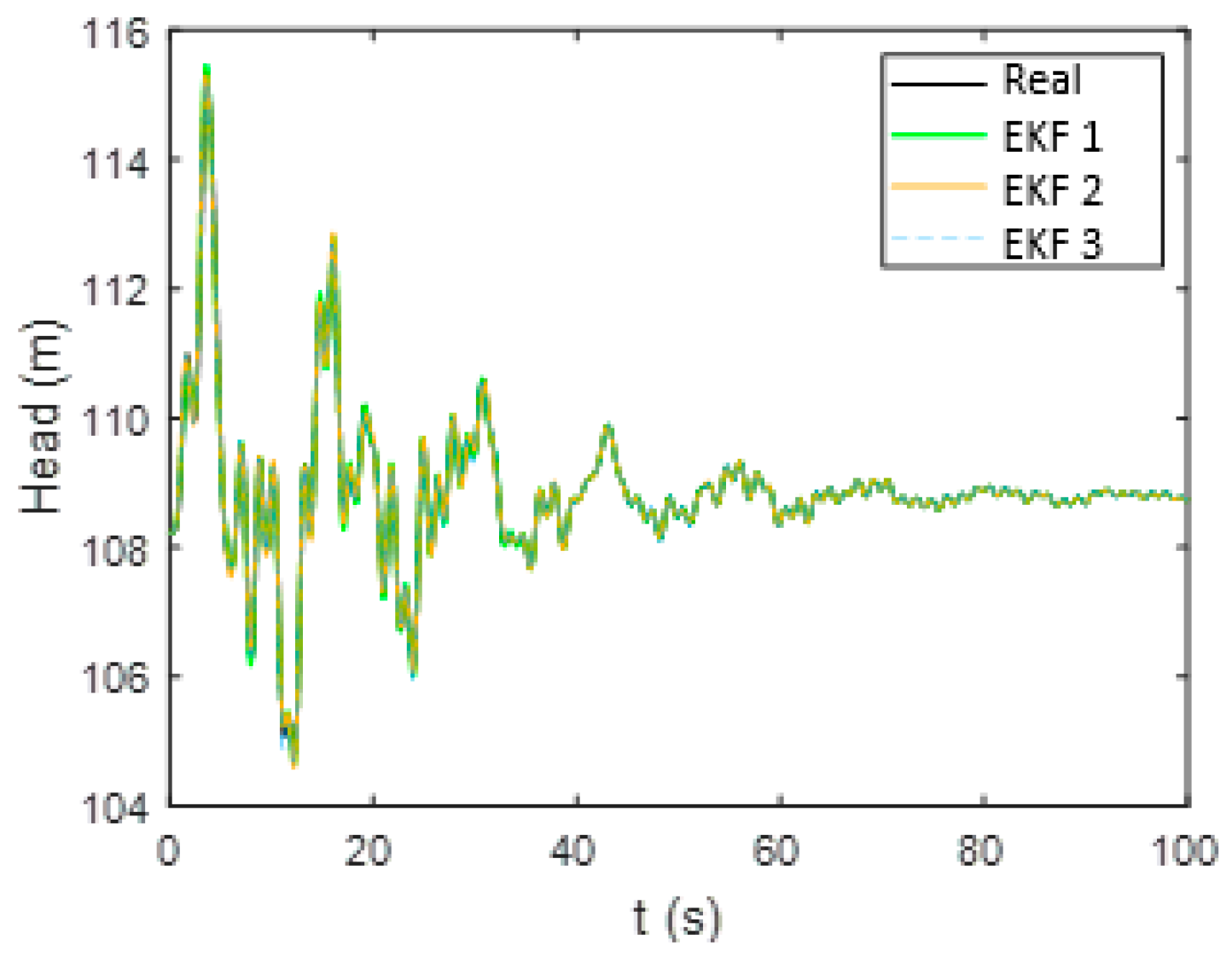
4. Transient Data Assimilation: 51-Pipe Network
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Du, R. Wireless Sensor Networks in Smart Cities: The Monitoring of Water Distribution Networks Case. Ph.D. Thesis, KTH Royal Institute of Technology, Stockholm, Sweden, 2016. Volume 40. [Google Scholar]
- Jung, D.; Lansey, K. Water Distribution System Burst Detection Using a Nonlinear Kalman Filter. J. Water Resour. Plann. Manag. 2015, 141, 04014070. [Google Scholar] [CrossRef]
- Reddy, H.P.; Narasimhan, S.; Bhallamudi, S.M.; Bairagi, S. Leak Detection in Gas Pipeline Networks Using an Efficient State Estimator. Part-I: Theory and Simulations. Comput. Chem. Eng. 2011, 35, 651–661. [Google Scholar] [CrossRef]
- Ye, G.; Fenner, R.A. Kalman Filtering of Hydraulic Measurements for Burst Detection in Water Distribution Systems. J. Pipeline Syst. Eng. Pract. 2011, 2, 14–22. [Google Scholar] [CrossRef]
- Zeng, W.; Zecchin, A.C.; Lambert, M.F. Elastic Water Column Model for Hydraulic Transient Analysis of Pipe Networks. J. Hydraul. Eng. 2022, 148, 04022027. [Google Scholar] [CrossRef]
- Zecchin, A.C. Laplace-Domain Analysis of Fluid Line Networks with Applications to Time-Domain Simulation and System Parameter Identification. Ph.D. Thesis, University of Adelaide, Adelaide, Australia, 2010. [Google Scholar]

Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ye, J.; Zeng, W.; Lambert, M.; Zecchin, A.; Do, N.C. Hydraulic Transient Data Assimilation in Pipe Networks Using the Kalman Filter. Eng. Proc. 2024, 69, 199. https://doi.org/10.3390/engproc2024069199
Ye J, Zeng W, Lambert M, Zecchin A, Do NC. Hydraulic Transient Data Assimilation in Pipe Networks Using the Kalman Filter. Engineering Proceedings. 2024; 69(1):199. https://doi.org/10.3390/engproc2024069199
Chicago/Turabian StyleYe, Jiawei, Wei Zeng, Martin Lambert, Aaron Zecchin, and Nhu Cuong Do. 2024. "Hydraulic Transient Data Assimilation in Pipe Networks Using the Kalman Filter" Engineering Proceedings 69, no. 1: 199. https://doi.org/10.3390/engproc2024069199
APA StyleYe, J., Zeng, W., Lambert, M., Zecchin, A., & Do, N. C. (2024). Hydraulic Transient Data Assimilation in Pipe Networks Using the Kalman Filter. Engineering Proceedings, 69(1), 199. https://doi.org/10.3390/engproc2024069199