
Experimental Study of the Pin Loads in a Full Pinion Engagement Planetary Gear Train †

 ,
,
Abstract
1. Introduction
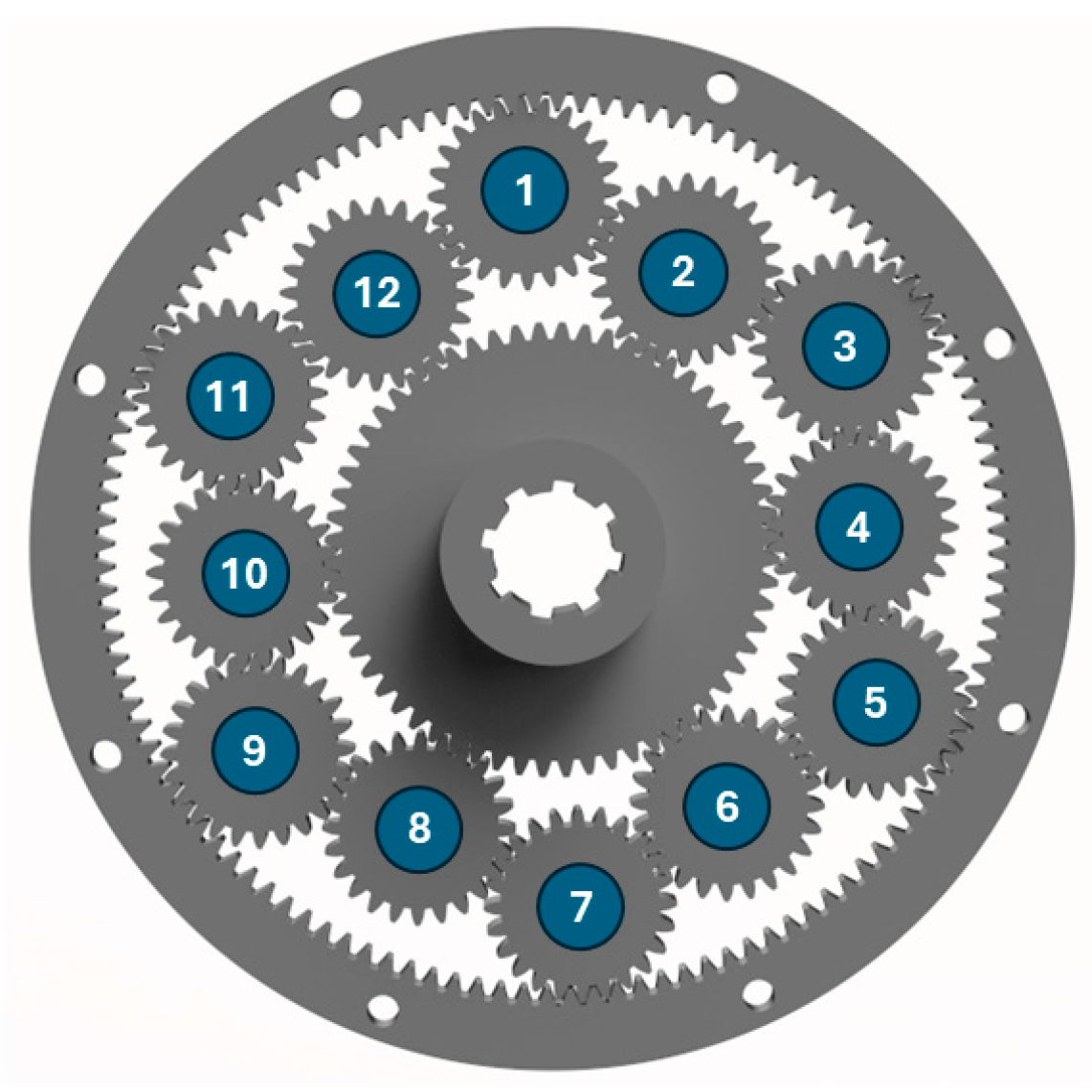
2. Description of the Experiment
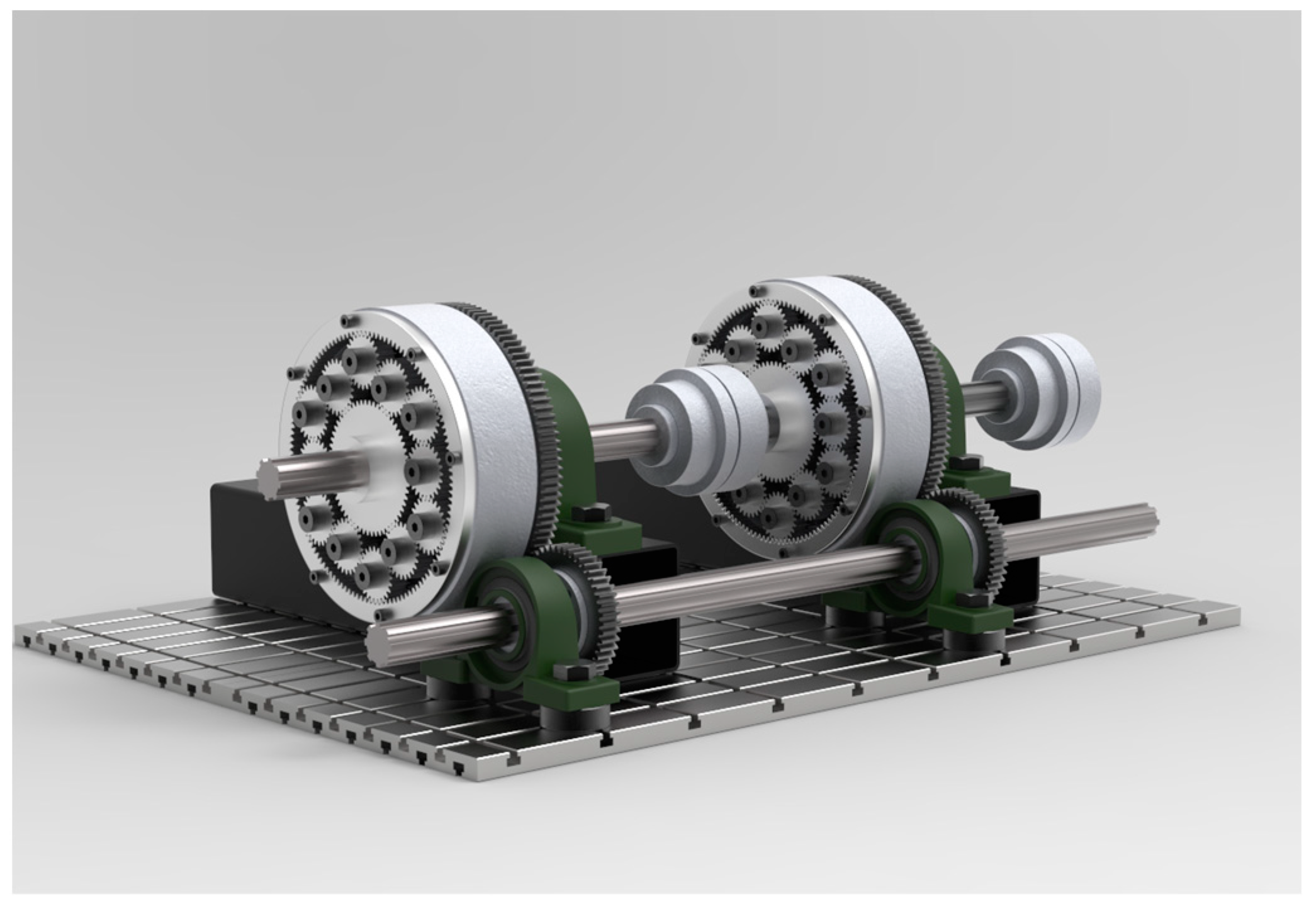
2.1. The Test Rig
2.2. The Measurement System
3. The Experimental Results
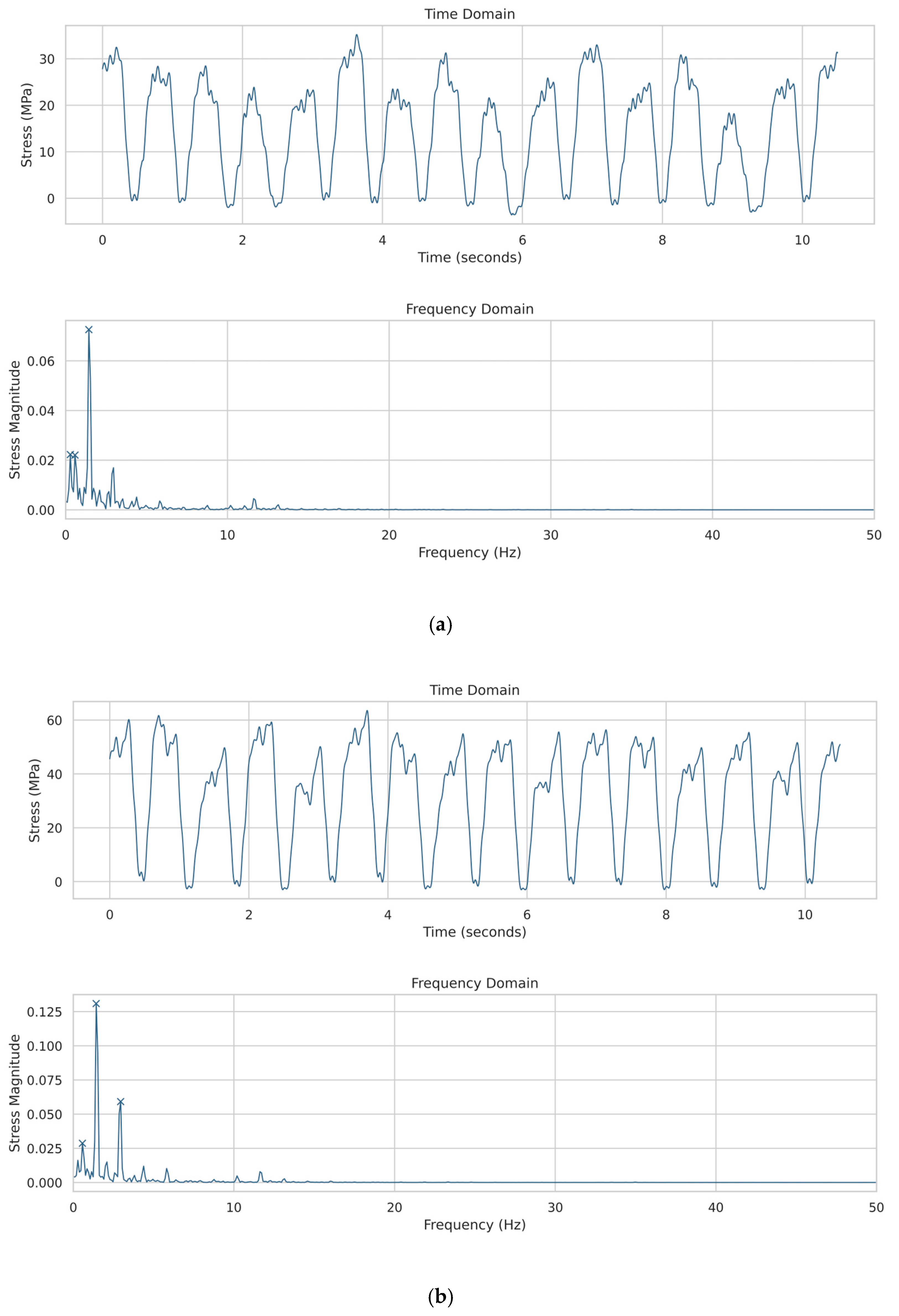
- The highest stress magnitudes, varying in the range 0.0498 ÷ 0.1309 at frequency 1.4284, correspond to the rotational frequency of the planets;
- The next highest stress magnitudes in the range 0.022 ÷ 0.0498 at frequency 0.5714 correspond to the sun gear rotational frequency;
- The lowest values for the stress amplitudes, varying between 0.022 and 0.026, were recorded at frequency 0.2857, which is the ring gear rotational frequency.
- The frequencies 1.1427 Hz and 2.9520 Hz do not coincide with any of the rotating components’ frequencies. The first of the two, however, is two times higher than the sun gear frequency and four times higher than the ring gear frequency so that it can be considered a sun gear harmonic or a ring gear harmonic. The frequency 2.9520 Hz is 2.06665 higher than the planet frequency, which means that it might be a harmonic, although it differs from the theoretically ideal value, but due to the limited number of experiments which were conducted on that specific test rig, an explanation is still hard to make.
4. Conclusions
- The radial run-out errors significantly influence the load in general and the load distribution in particular between the planets in full pinion engagement planetary gear trains;
- Due to the specific arrangement of the gear set components, a direct correlation between the planets’ radial run-out errors and the stress magnitudes of their pins cannot be made. This becomes clear when comparing the results from Table 2 with the values for the run-out errors presented in Table 3, namely, the highest stress magnitudes are observed in tangential direction of planet 12, which shows the lowest eccentricity of all three planets. On the other hand, the stress magnitude in the tangential direction of planet 1, which has the highest run-out of all twelve planets, has its lowest value of 0.0498.
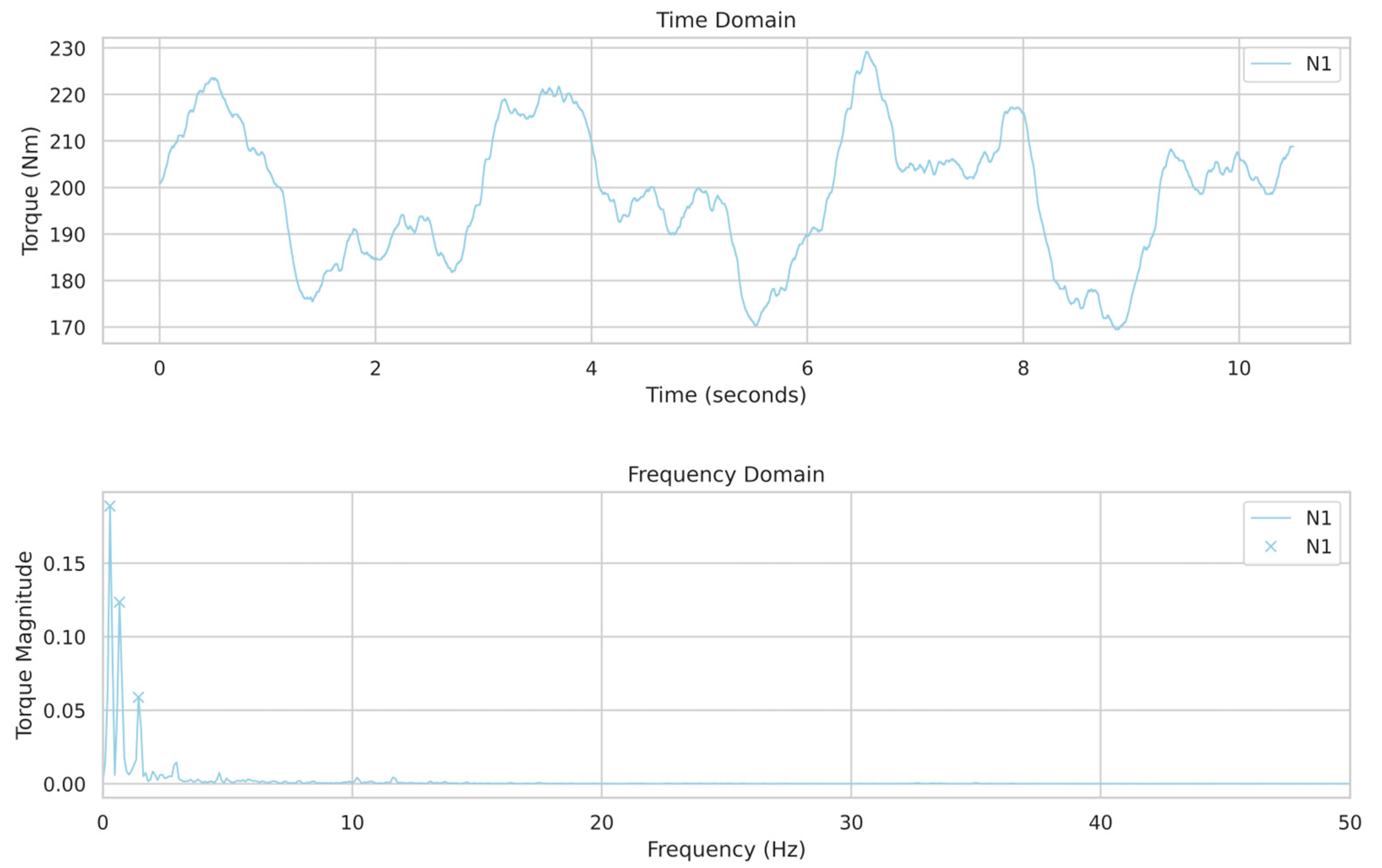
- The experimental results, which are presented in Figure 7, show that the radial run-out errors of the planets can play a significant role in shaping the torque curve. The same applies to the sun gear and the ring gear. Another important issue, which can be observed in the above-mentioned figure, is the influence of the test equipment on the experimental results. In this respect, the FFT analysis helps isolate that influence and put an emphasis on the impact of the parameters under study.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chavushyan, V.; Nikolov, S.; Georgieva, V. Study of problems in application and design of SCARA robots in the semiconductor industry. AIP Conf. Proc. 2024, 3063, 060011. [Google Scholar]
- Boguski, B.; Kahraman, A.; Nishino, T. A new method to measure planet load sharing and sun gear radial orbit of planetary gear sets. In Proceeding of the ASME 2011 International Design Engineering Technical Conferences & Computers and Information in Engineering Conference IDETC/CIE 2011, Washington, DC, USA, 28–31 August 2011. [Google Scholar]
- Arnaudov, K.; Karaivanov, D. Planetary Gear Trains; Taylor & Francis Group, LLC.: Abingdon, UK, 2019. [Google Scholar]
- Ivanov, V. Load sharing analysis of a full pinion engagement planetary gear train. AIP Conf. Proc. 2024, 3063, 060004. [Google Scholar]
- Ivanov, V.; Aleksandrov, A.; Tsonev, V.; Kuzmanov, N.; Troha, S.; Dimitrov, L. The effect of external forces on the load sharing of a full planet engagement planetary gear train. In Proceedings of the International Conference on Communications, Information, Electronic and Energy Systems (CIEES 2022), Veliko Tarnovo, Bulgaria, 24–26 November 2022. [Google Scholar]
- Shivputra, A.; Shrigandhi, G. Gear Fault Identification by using Vibration Analysis. Int. J. Curr. Eng. Technol. 2016, 247–253. Available online: https://inpressco.com/category/ijcet (accessed on 25 May 2024).
- Aherwar, A. An investigation on gearbox fault detection using vibration analysis techniques: A review. Aust. J. Mech. Eng. 2012, 10, 169–183. [Google Scholar] [CrossRef]
- Vernekar, K.; Kumar, H.; Gangadharan, K.V. Gear fault detection using vibration analysis and continuous wavelet transform. Procedia Mater. Sci. 2014, 5, 1846–1852. [Google Scholar] [CrossRef]
- Dimitrov, L.; Michalopoulos, D.; Apostolopoulos, C.A.; Neshkov, T. Investigation of Contact Fatigue of High Strength Steel Gears Subjected to Surface Treatment. J. Mater. Eng. Perform. 2008, 18, 939–946. [Google Scholar] [CrossRef]
- Mozafari, S.; Rezazadeh Mohamadi, M.; Dolatkhah Takloo, S.; Mardani, M. Design of a mechanically closed-loop test rig for testing aviation industry’s gearboxes. Aviation 2017, 21, 132–142. [Google Scholar] [CrossRef]
- Lee, G.-H.; Park, Y.-J.; Nam, J.-S.; Oh, J.-Y.; Kim, J.-G. Design of a Mechanical Power Circulation Test Rig for a Wind Turbine Gearbox. Appl. Sci. 2020, 10, 3240. [Google Scholar] [CrossRef]
- Mihailidis, A.; Athanassios, I. A new system for testing gears under variable torque and speed. Recent Pat. Mech. Eng. 2009, 2, 179–192. [Google Scholar] [CrossRef]




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Gear | Number of Teeth | Rotational Frequency [Hz] |
|---|---|---|
| Module m = 2 mm | ||
| Sun gear | 60 | 0.56 |
| Ring gear | 120 | 0.28 |
| Inner planet | 24 | 1.4 |
| Outer planet | 24 | 1.4 |
| Planet Number | Frequency [Hz] | Stress Magnitude |
|---|---|---|
| 1—radial direction | 0.5714 | 0.0298 |
| 1.4284 | 0.0921 | |
| 2.9520 | 0.0330 | |
| 1—tangential direction | 0.5714 | 0.0498 |
| 1.1427 | 0.0202 | |
| 1.4284 | 0.0498 | |
| 2—radial direction | 0.2857 | 0.0267 |
| 0.5714 | 0.0271 | |
| 1.4284 | 0.1257 | |
| 2.9520 | 0.0209 | |
| 2—tangential direction | 0.5714 | 0.0315 |
| 1.1427 | 0.0234 | |
| 1.4284 | 0.0848 | |
| 12—radial direction | 0.2857 | 0.022 |
| 0.5714 | 0.022 | |
| 1.4284 | 0.0726 | |
| 12—tangential direction | 0.5714 | 0.0286 |
| 1.4284 | 0.1309 | |
| 2.9520 | 0.0592 |
| Planet Number | Radial Run-Out [mm] |
|---|---|
| 1 | 0.25 |
| 2 | 0.19 |
| 12 | 0.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ivanov, V.; Alexandrov, A.; Vrazhilski, D.; Tomova-Damyanova, E.; Tsonev, V.; Kuzmanov, N.; Popov, A. Experimental Study of the Pin Loads in a Full Pinion Engagement Planetary Gear Train. Eng. Proc. 2024, 70, 13. https://doi.org/10.3390/engproc2024070013
Ivanov V, Alexandrov A, Vrazhilski D, Tomova-Damyanova E, Tsonev V, Kuzmanov N, Popov A. Experimental Study of the Pin Loads in a Full Pinion Engagement Planetary Gear Train. Engineering Proceedings. 2024; 70(1):13. https://doi.org/10.3390/engproc2024070013
Chicago/Turabian StyleIvanov, Vladislav, Angel Alexandrov, Dragomir Vrazhilski, Elitsa Tomova-Damyanova, Veselin Tsonev, Nikola Kuzmanov, and Aleksandar Popov. 2024. "Experimental Study of the Pin Loads in a Full Pinion Engagement Planetary Gear Train" Engineering Proceedings 70, no. 1: 13. https://doi.org/10.3390/engproc2024070013
APA StyleIvanov, V., Alexandrov, A., Vrazhilski, D., Tomova-Damyanova, E., Tsonev, V., Kuzmanov, N., & Popov, A. (2024). Experimental Study of the Pin Loads in a Full Pinion Engagement Planetary Gear Train. Engineering Proceedings, 70(1), 13. https://doi.org/10.3390/engproc2024070013