
Adaptive Sliding Mode Control of DC–DC Buck Converter with Load Fluctuations for Renewable Energy Systems †

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
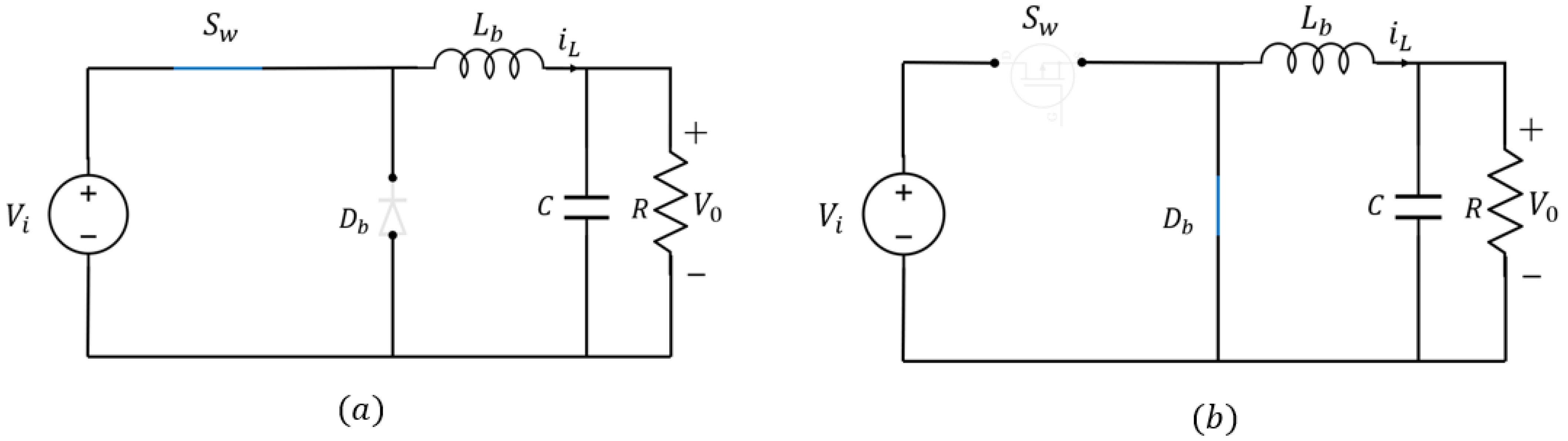
2. Analytical Modeling of Buck Converter
3. Adaptive Sliding Mode Controller Design
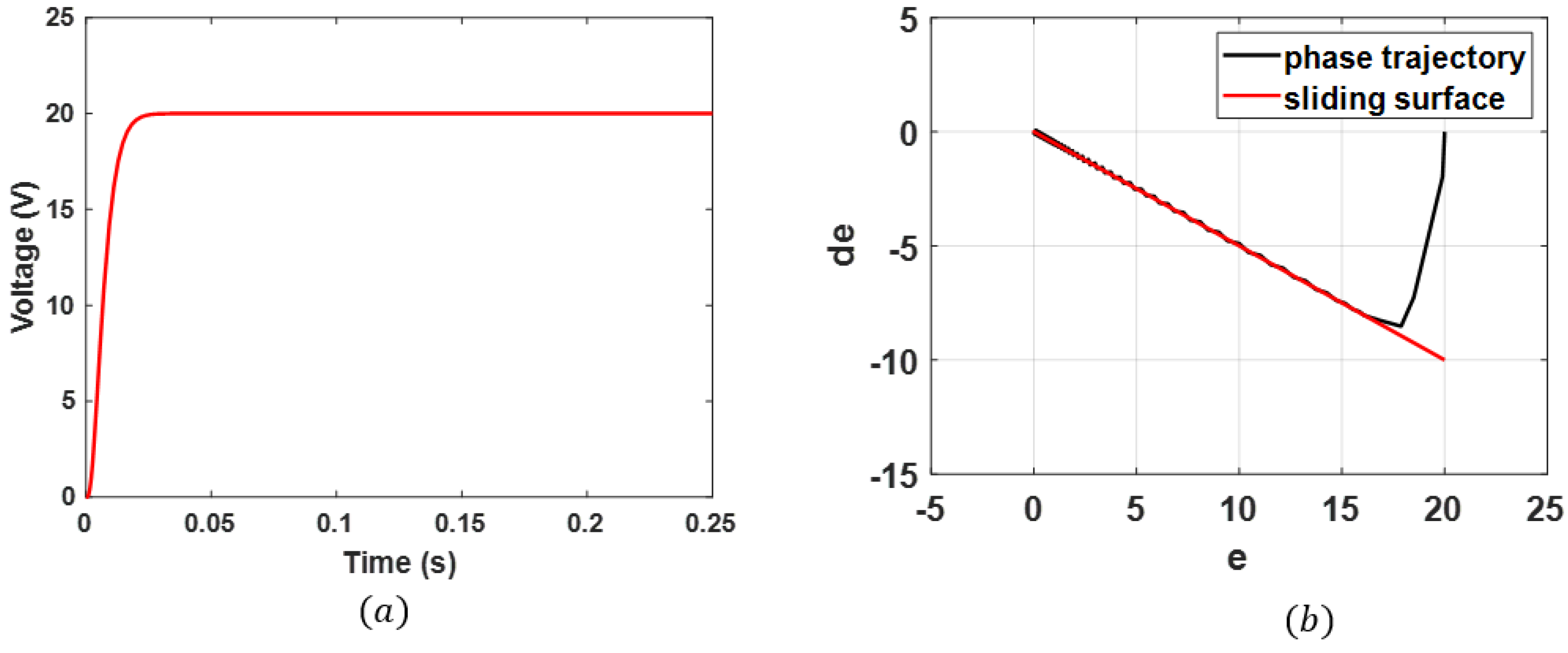
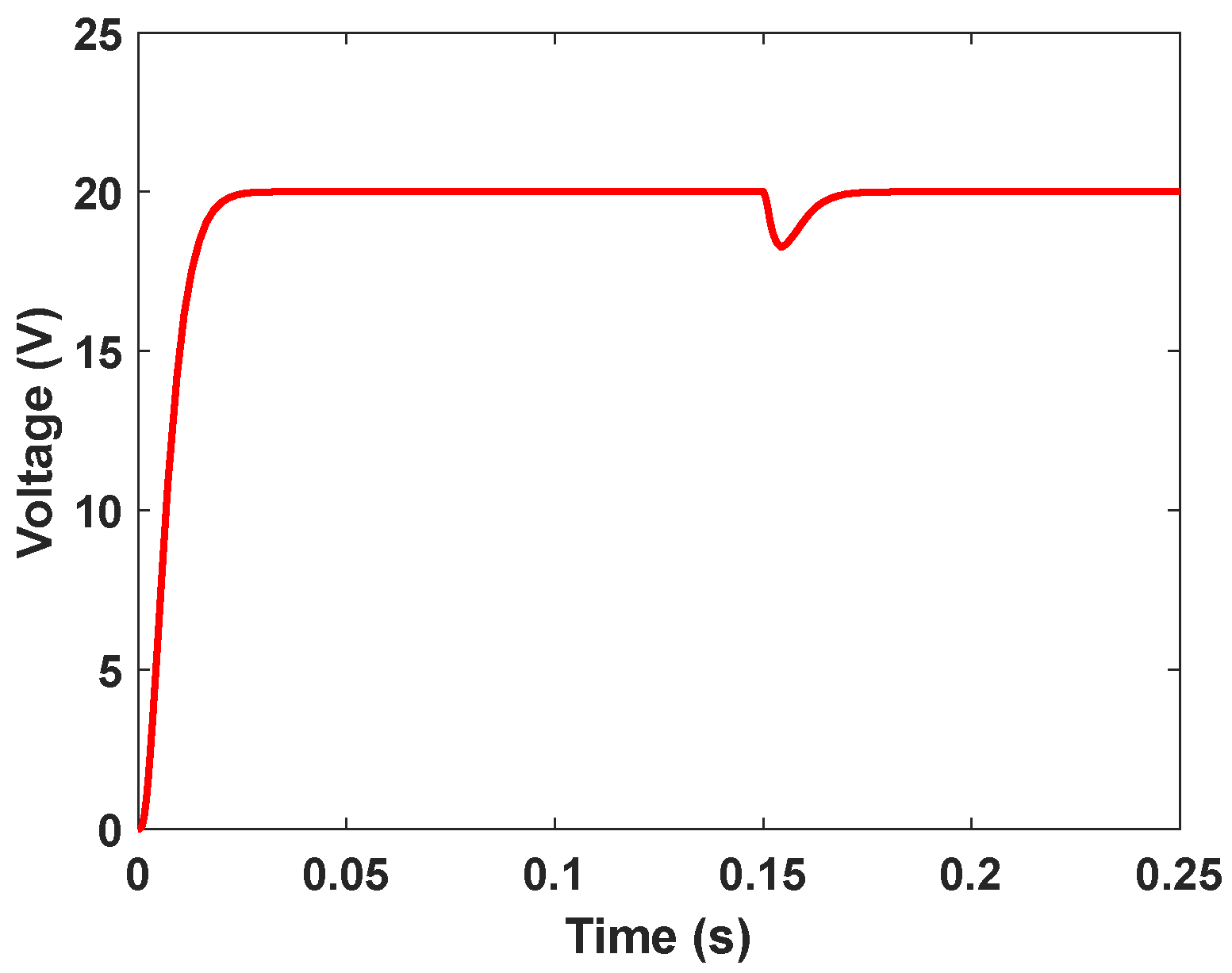
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ibarra, E.; Arias, A.; de Alegría, I.M.; Otero, A.; De Mallac, L. Digital control of multiphase series capacitor buck converter prototype for the powering of HL-LHC inner triplet magnets. IEEE Trans. Ind. Electron. 2021, 69, 10014–10024. [Google Scholar] [CrossRef]
- Babes, B.; Mekhilef, S.; Boutaghane, A.; Rahmani, L. Fuzzy approximation-based fractional-order nonsingular terminal sliding mode controller for DC–DC buck converters. IEEE Trans. Power Electron. 2021, 37, 2749–2760. [Google Scholar] [CrossRef]
- Malge, S.V.; Patil, S.L.; Deshpande, A.S.; Aher, P.K. Mismatched Disturbance Estimation Based Sliding Mode Control of DC-DC Power Converter. In Proceedings of the 2nd International Conference on Intelligent Technologies (CONIT), Hubli, India, 24–26 June 2022. [Google Scholar]
- Alshalalfah, A.L.; Hamad, G.B.; Mohamed, O.A. Towards safe and robust closed-loop artificial pancreas using improved PID-based control strategies. IEEE Trans. Circuits Syst. I Regul. Pap. 2021, 68, 3147–3157. [Google Scholar] [CrossRef]
- Jiang, B.; Lu, J.; Liu, Y.; Cao, J. Periodic event-triggered adaptive control for attitude stabilization under input saturation. IEEE Trans. Circuits Syst. I Regul. Pap. 2019, 67, 249–258. [Google Scholar] [CrossRef]
- Chi, X.; Lin, F.; Wang, Y.X. Disturbance and uncertainty-immune onboard charging batteries with fuel cell by using equivalent load fuzzy logic estimation-based backstepping sliding-mode control. IEEE Trans. Transp. Electrif. 2021, 7, 1249–1259. [Google Scholar] [CrossRef]
- Gheisarnejad, M.; Farsizadeh, H.; Khooban, M.H. A novel nonlinear deep reinforcement learning controller for DC–DC power buck converters. IEEE Trans. Ind. Electron. 2020, 68, 6849–6858. [Google Scholar] [CrossRef]
- Albira, M.E.; Zohdy, M.A. Adaptive model predictive control for DC-DC power converters with parameters’ uncertainties. IEEE Access 2021, 9, 135121–135131. [Google Scholar] [CrossRef]
- Sheh Zad, H.; Ulasyar, A.; Zohaib, A.; Khattak, A. Adaptive sliding mode predictive power control of three-phase AC/DC converters. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2022, 236, 897–912. [Google Scholar] [CrossRef]
- Liu, Z.; Lin, X.; Gao, Y.; Xu, R.; Wang, J.; Wang, Y.; Liu, J. Fixed-time sliding mode control for DC/DC buck converters with mismatched uncertainties. IEEE Trans. Circuits Syst. I Regul. Pap. 2022, 70, 472–480. [Google Scholar] [CrossRef]
- Mu, C.; He, H. Dynamic behavior of terminal sliding mode control. IEEE Trans. Ind. Electron. 2017, 65, 3480–3490. [Google Scholar] [CrossRef]
- Chiu, C.S.; Shen, C.T. Finite-time control of DC–DC buck converters via integral terminal sliding modes. Int. J. Electron. 2012, 99, 643–655. [Google Scholar] [CrossRef]
- Wang, Z.; Li, S.; Li, Q. Discrete-time fast terminal sliding mode control design for DC–DC buck converters with mismatched disturbances. IEEE Trans. Ind. Inform. 2019, 16, 1204–1213. [Google Scholar] [CrossRef]


Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zad, H.S.; Ulasyar, A.; Zohaib, A.; Irfan, M.; Haider, S.A.; Yaqoob, Z. Adaptive Sliding Mode Control of DC–DC Buck Converter with Load Fluctuations for Renewable Energy Systems. Eng. Proc. 2024, 75, 10. https://doi.org/10.3390/engproc2024075010
Zad HS, Ulasyar A, Zohaib A, Irfan M, Haider SA, Yaqoob Z. Adaptive Sliding Mode Control of DC–DC Buck Converter with Load Fluctuations for Renewable Energy Systems. Engineering Proceedings. 2024; 75(1):10. https://doi.org/10.3390/engproc2024075010
Chicago/Turabian StyleZad, Haris Sheh, Abasin Ulasyar, Adil Zohaib, Muhammad Irfan, Samid Ali Haider, and Zeeshan Yaqoob. 2024. "Adaptive Sliding Mode Control of DC–DC Buck Converter with Load Fluctuations for Renewable Energy Systems" Engineering Proceedings 75, no. 1: 10. https://doi.org/10.3390/engproc2024075010
APA StyleZad, H. S., Ulasyar, A., Zohaib, A., Irfan, M., Haider, S. A., & Yaqoob, Z. (2024). Adaptive Sliding Mode Control of DC–DC Buck Converter with Load Fluctuations for Renewable Energy Systems. Engineering Proceedings, 75(1), 10. https://doi.org/10.3390/engproc2024075010