
Robust & Optimal Predictive Current Control for Bi-Directional DC-DC Converter in Distributed Energy Storage Systems †

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
1. Introduction
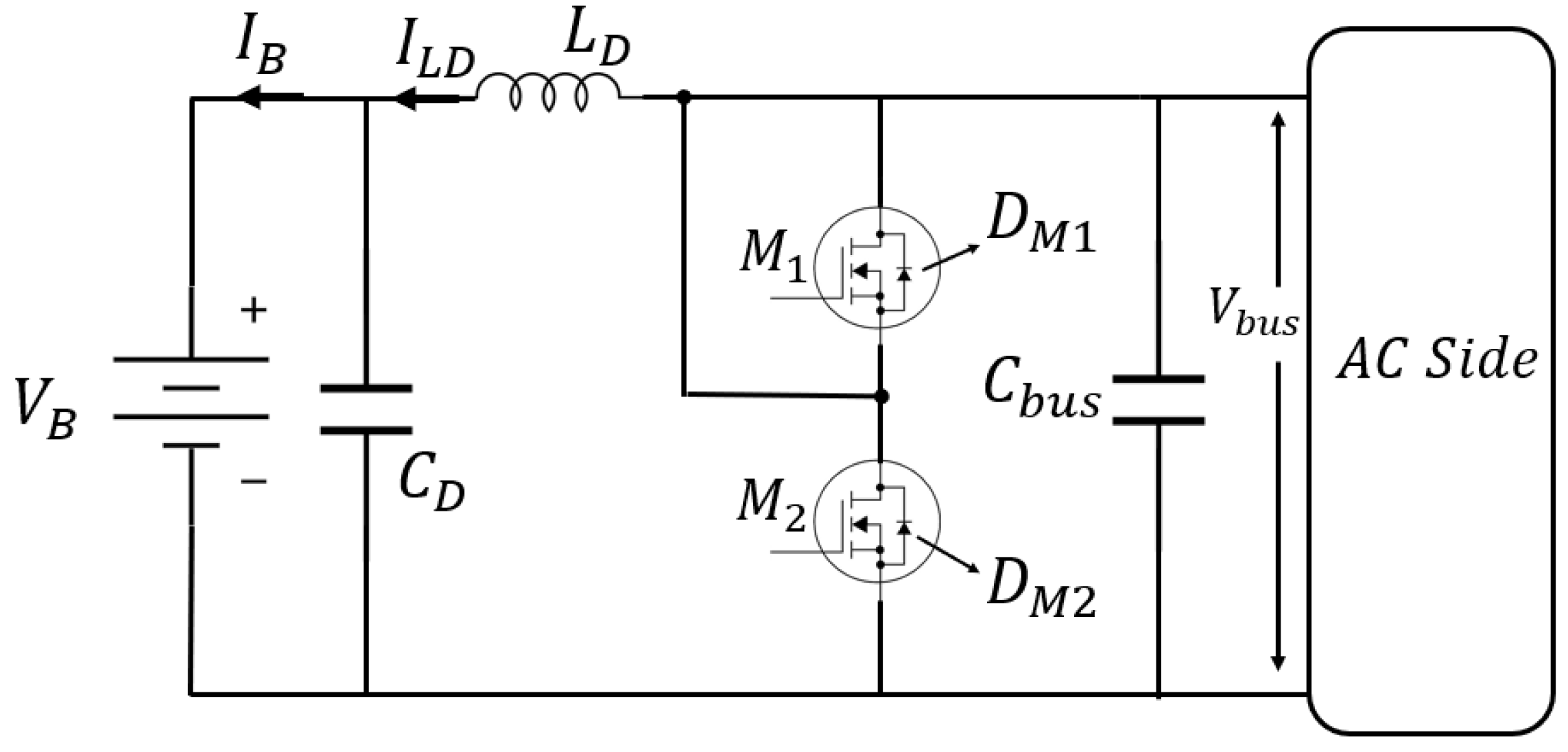
2. Analytical Modeling of Bi-Directional Converter
2.1. Charging Mode of Bi-Directional Converter
2.2. Discharging Mode of Bi-Directional Converter
3. Design of Robust & Optimal Controller
4. Results
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Un-Noor, F.; Padmanaban, S.; Mihet-Popa, L.; Mollah, M.N.; Hossain, E. A comprehensive study of key electric vehicle (EV) components, technologies, challenges, impacts, and future direction of development. Energies 2017, 10, 1217. [Google Scholar] [CrossRef]
- Komurcugil, H.; Bayhan, S.; Guzman, R.; Malinowski, M.; Abu-Rub, H. Advanced Control of Power Converters: Techniques and Matlab/Simulink Implementation; John Wiley & Sons: New York, NY, USA, 2023. [Google Scholar]
- Liu, Z.; Miao, S.; Kang, Y.; Fan, Z.; Ye, C.; Li, L.; Chao, K. A bidirectional droop control strategy for the hybrid microgrid with AC/DC distributed generation integration. In Proceedings of the 2018 13th IEEE Conference on Industrial Electronics and Applications (ICIEA), Wuhan, China, 31 May–2 June 2018; IEEE: New York, NY, USA, 2018; pp. 1762–1767. [Google Scholar]
- Li, P.; Guo, T.; Pan, Y. An adaptive coordinated constant voltage control method considering power margin for parallel bidirectional power converters in AC/DC hybrid microgrid. In Proceedings of the 2022 IEEE/IAS Industrial and Commercial Power System Asia (I&CPS Asia), Shanghai, China, 8–11 July 2022; IEEE: New York, NY, USA, 2022; pp. 1028–1033. [Google Scholar]
- Srivastava, M.; Nama, J.K.; Verma, A.K. An efficient topology for electric vehicle battery charging. In Proceedings of the 2017 IEEE PES Asia-Pacific Power and Energy Engineering Conference (APPEEC), Bangalore, India, 8–10 November 2017; IEEE: New York, NY, USA, 2017; pp. 1–6. [Google Scholar]
- Yuan, L.; Li, J. Consensus of discrete-time nonlinear multiagent systems using sliding mode control based on optimal control. IEEE Access 2022, 10, 47275–47283. [Google Scholar] [CrossRef]
- Wang, X.; Chen, M.; Li, B.; Zhu, G.; Chen, L.; Sun, X.; Zhang, D.; Hu, J. Control and modulation of a single-phase AC/DC converter with smooth bidirectional mode switching and symmetrical decoupling voltage compensation. IEEE Trans. Power Electron. 2021, 37, 3836–3853. [Google Scholar] [CrossRef]
- Jeeranantasin, N.; Nungam, S. Sliding mode control of three-phase AC/DC converters using exponential rate reaching law. J. Syst. Eng. Electron. 2022, 33, 210–221. [Google Scholar] [CrossRef]
- Jiao, J.; Meng, R.; Guan, Z.; Ren, C.; Wang, L.; Zhang, B. Grid-connected control strategy for bidirectional ac-dc interlinking converter in ac-dc hybrid microgrid. In Proceedings of the 2019 IEEE 10th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Xi’an, China, 3–6 June 2019; IEEE: New York, NY, USA, 2019; pp. 341–345. [Google Scholar]
- Hu, J.; Zhu, J.; Dorrell, D.G. In-depth study of direct power control strategies for power converters. IET Power Electron. 2014, 7, 1810–1820. [Google Scholar] [CrossRef]
- Zhang, Y.; Li, Z.; Zhang, Y.; Xie, W.; Piao, Z.; Hu, C. Performance improvement of direct power control of PWM rectifier with simple calculation. IEEE Trans. Power Electron. 2012, 28, 3428–3437. [Google Scholar] [CrossRef]
- Sheh Zad, H.; Ulasyar, A.; Zohaib, A.; Khattak, A. Adaptive sliding mode predictive power control of three-phase AC/DC converters. Proc. Inst. Mech. Eng. Part I J. Syst. Control. Eng. 2022, 236, 897–912. [Google Scholar] [CrossRef]
- Sun, K.; Chen, H.; Wu, H.F. A review of analysis method and control technology for isolated bidirectional DC-DC converter used in energy storage systems. Adv. Technol. Electr. Eng. Energy 2019, 38, 1–9. [Google Scholar]
- Shan, Y.; Hu, J.; Li, Z.; Guerrero, J.M. A model predictive control for renewable energy based AC microgrids without any PID regulators. IEEE Trans. Power Electron. 2018, 33, 9122–9126. [Google Scholar] [CrossRef]
- Shan, Y.; Hu, J.; Chan, K.W.; Fu, Q.; Guerrero, J.M. Model predictive control of bidirectional DC–DC converters and AC/DC interlinking converters—A new control method for PV-wind-battery microgrids. IEEE Trans. Sustain. Energy 2018, 10, 1823–1833. [Google Scholar] [CrossRef]
- Antoniewicz, P.; Kazmierkowski, M.P.; Cortes, P.; Rodriguez, J.; Sikorski, A. Predictive direct power control algorithm for three phase AC/DC converter. In Proceedings of the EUROCON 2007-The International Conference on” Computer as a Tool”, Warsaw, Poland, 9–12 September 2007; IEEE: New York, NY, USA, 2007; pp. 1530–1534. [Google Scholar]
- Viswanatha, V. Microcontroller based bidirectional buck–boost converter for photo-voltaic power plant. J. Electr. Syst. Inf. Technol. 2018, 5, 745–758. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zad, H.S.; Ulasyar, A.; Zohaib, A.; Irfan, M.; Yaqoob, Z.; Haider, S.A. Robust & Optimal Predictive Current Control for Bi-Directional DC-DC Converter in Distributed Energy Storage Systems. Eng. Proc. 2024, 75, 26. https://doi.org/10.3390/engproc2024075026
Zad HS, Ulasyar A, Zohaib A, Irfan M, Yaqoob Z, Haider SA. Robust & Optimal Predictive Current Control for Bi-Directional DC-DC Converter in Distributed Energy Storage Systems. Engineering Proceedings. 2024; 75(1):26. https://doi.org/10.3390/engproc2024075026
Chicago/Turabian StyleZad, Haris Sheh, Abasin Ulasyar, Adil Zohaib, Muhammad Irfan, Zeeshan Yaqoob, and Samid Ali Haider. 2024. "Robust & Optimal Predictive Current Control for Bi-Directional DC-DC Converter in Distributed Energy Storage Systems" Engineering Proceedings 75, no. 1: 26. https://doi.org/10.3390/engproc2024075026
APA StyleZad, H. S., Ulasyar, A., Zohaib, A., Irfan, M., Yaqoob, Z., & Haider, S. A. (2024). Robust & Optimal Predictive Current Control for Bi-Directional DC-DC Converter in Distributed Energy Storage Systems. Engineering Proceedings, 75(1), 26. https://doi.org/10.3390/engproc2024075026