
Fast Collision Detection Method with Octree-Based Parallel Processing in Unity3D †


Abstract
1. Introduction
2. Related Work
3. Methodology
3.1. Octree Structure
3.2. AABB
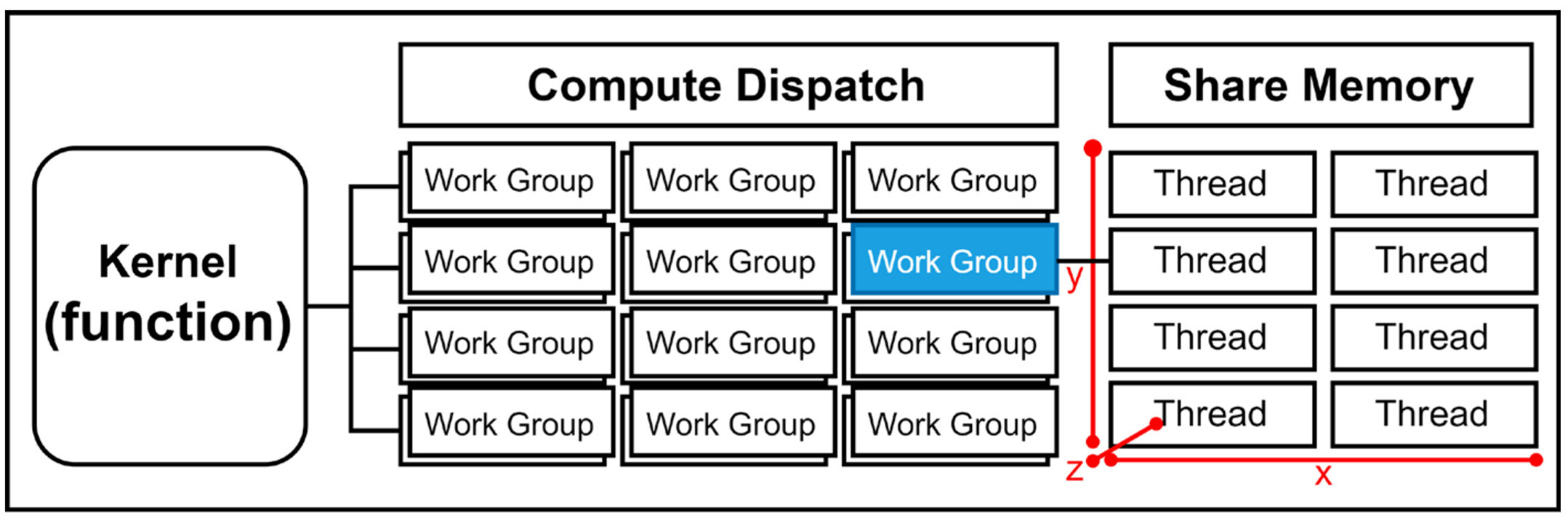
3.3. GPU Parallel Processing
4. Result and Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Nie, Q.; Zhao, Y.; Xu, L.; Li, B. A survey of continuous collision detection. In Proceedings of the IEEE International Conference on Information Technology and Computer Application (ITCA), Guangzhou, China, 18–20 December 2020; pp. 252–257. [Google Scholar]
- Ströter, D.; Mueller-Roemer, J.S.; Stork, A.; Fellner, D.W. OLBVH: Octree linear bounding volume hierarchy for volumetric meshes. Vis. Comput. 2020, 36, 2327–2340. [Google Scholar] [CrossRef]
- Wang, M.; Chen, S.; Yang, Q. Design and application of bounding volume hierarchy collision detection algorithm based on virtual sphere. J. Mech. Med. Biol. 2019, 19, 1940044. [Google Scholar] [CrossRef]
- Melero, F.J.; Aguilera, A.; Feito, F.R. Fast collision detection between high resolution polygonal models. Comput. Graph. 2019, 83, 97–106. [Google Scholar] [CrossRef]
- Sung, M. Visibility-Based Fast Collision Detection of a large number of Moving Objects on GPU. IEEE Access 2023, 11, 49456–49463. [Google Scholar] [CrossRef]
- Aissa, N.; Douteau, L.; Abisset-Chavanne, E.; Digonnet, H.; Laure, P.; Silva, L. Octree Optimized Micrometric Fibrous Microstructure Generation for Domain Reconstruction and Flow Simulation. Entropy 2021, 23, 1156. [Google Scholar] [CrossRef] [PubMed]
- Serpa, Y.R.; Rodrigues, M.A.F. Broadmark: A Testing Framework for Broad-Phase Collision Detection Algorithms. Comput. Graph. Forum 2020, 39, 436–449. [Google Scholar] [CrossRef]
- Mihai, C.C.; Lupu, C. Using graphics processing units and compute shader in real time multimodel adaptive robust control. Electronic 2021, 10, 2462. [Google Scholar] [CrossRef]
- Yang, Y.; Chen, X.; Han, Y. Dadu-CD: Fast and efficient processing-in-memory accelerator for collision detection. In Proceedings of the ACM/IEEE Design Automation Conference (DAC), San Francisco, CA, USA, 20–24 July 2020; pp. 1–6. [Google Scholar]
- Va, H.; Choi, M.H.; Hong, M. Real-time cloth simulation using compute shader in Unity3D for AR/VR contents. Appl. Sci. 2021, 11, 8255. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 3D Model | Computation Comparison | |||
|---|---|---|---|---|
| Number of Objects | Average FPS in CPU | Average FPS in GPU | Times | |
| Sphere 162 vertices 320 triangles | 10 | 24.16 | 650.98 | 26 |
| 15 | 12.34 | 645.25 | 52 | |
| 20 | 7.42 | 643.30 | 86 | |
| 180 | – | 532.71 | – | |
| Torus 2304 vertices 4608 triangles | 10 | 6.83 | 638.34 | 93 |
| 15 | 4.16 | 637.48 | 153 | |
| 20 | 2.9 | 635.62 | 219 | |
| 180 | – | 372.88 | – | |
| Bunny 2990 vertices 5976 triangles | 10 | 5.51 | 635.25 | 115 |
| 15 | 3.39 | 633.52 | 186 | |
| 20 | 2.39 | 629.19 | 263 | |
| 180 | – | 360.64 | – | |
| Armadillo 6362 vertices 12,720 triangles | 10 | 2.91 | 623.26 | 214 |
| 15 | 1.87 | 622.19 | 322 | |
| 20 | – | 619.23 | – | |
| 180 | – | 196.33 | – | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hor, K.; Kim, T.; Hong, M. Fast Collision Detection Method with Octree-Based Parallel Processing in Unity3D. Eng. Proc. 2025, 89, 37. https://doi.org/10.3390/engproc2025089037
Hor K, Kim T, Hong M. Fast Collision Detection Method with Octree-Based Parallel Processing in Unity3D. Engineering Proceedings. 2025; 89(1):37. https://doi.org/10.3390/engproc2025089037
Chicago/Turabian StyleHor, Kunthroza, Taeheon Kim, and Min Hong. 2025. "Fast Collision Detection Method with Octree-Based Parallel Processing in Unity3D" Engineering Proceedings 89, no. 1: 37. https://doi.org/10.3390/engproc2025089037
APA StyleHor, K., Kim, T., & Hong, M. (2025). Fast Collision Detection Method with Octree-Based Parallel Processing in Unity3D. Engineering Proceedings, 89(1), 37. https://doi.org/10.3390/engproc2025089037