


Comparison of Dimensional Accuracy between a Laser Scanner and a Laser Tracker with Handheld Scan in a Laboratory Setting

 ,
, 
Abstract
1. Introduction
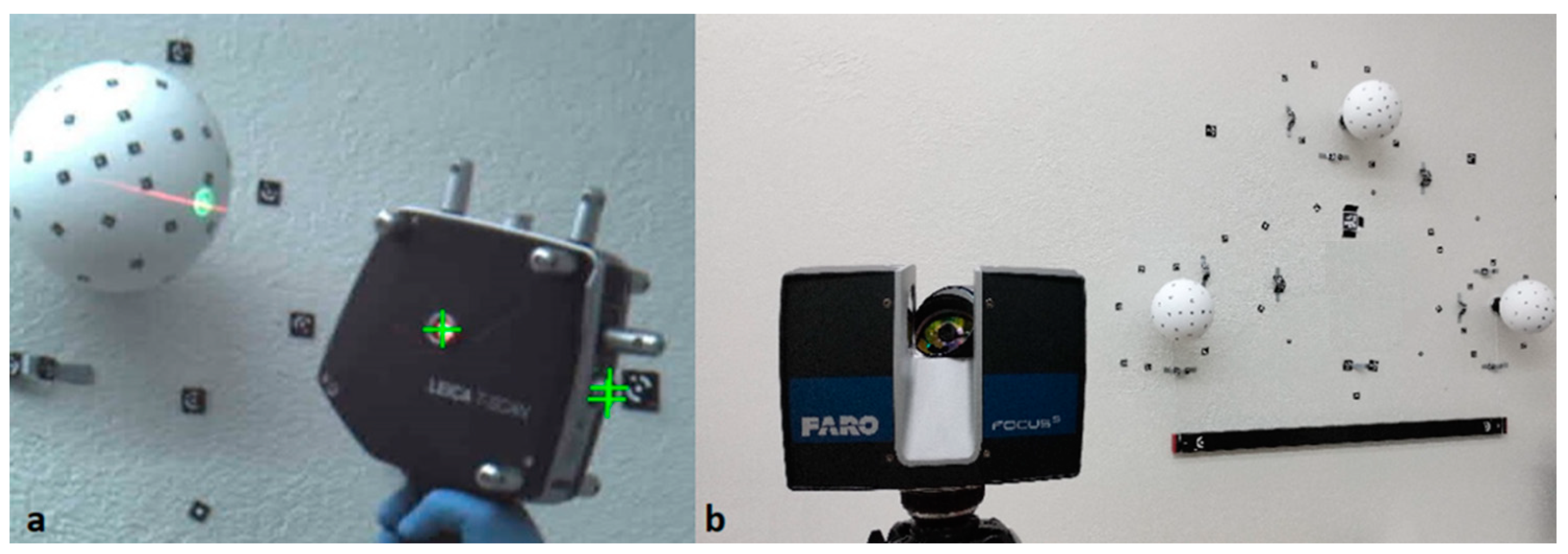
2. Materials and Methods
3. Results
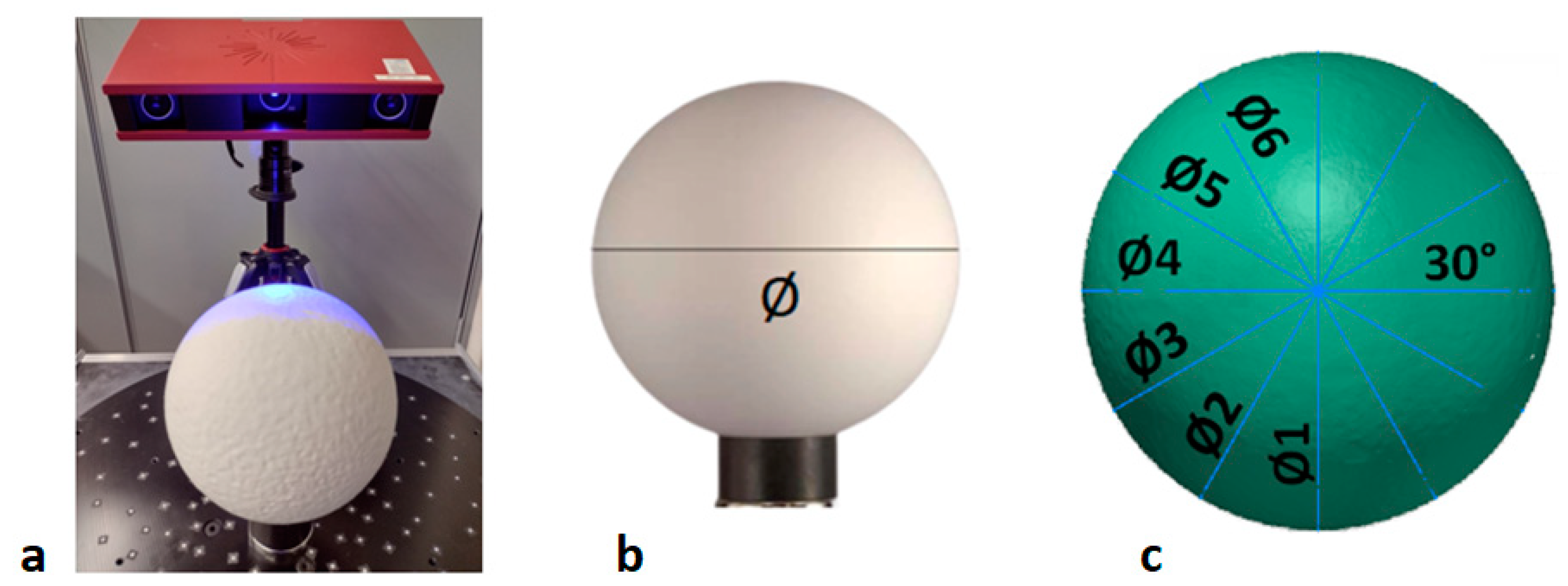
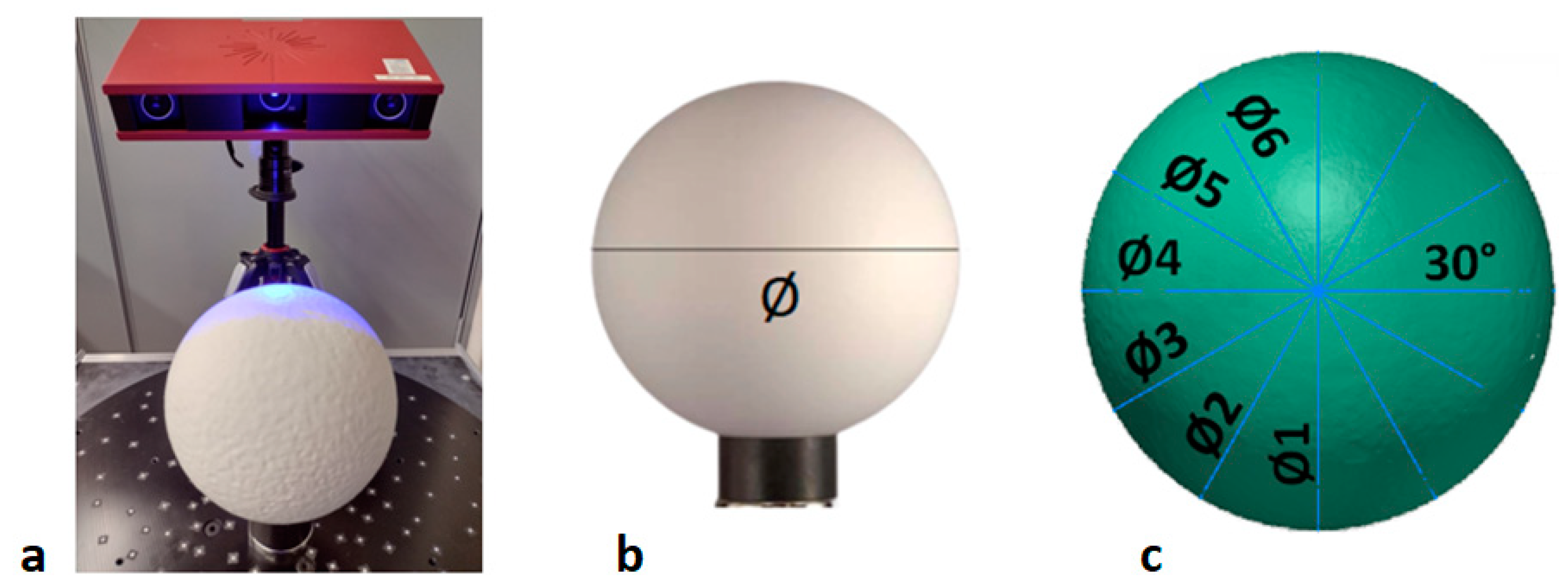
3.1. Determination of Sphere Form Error
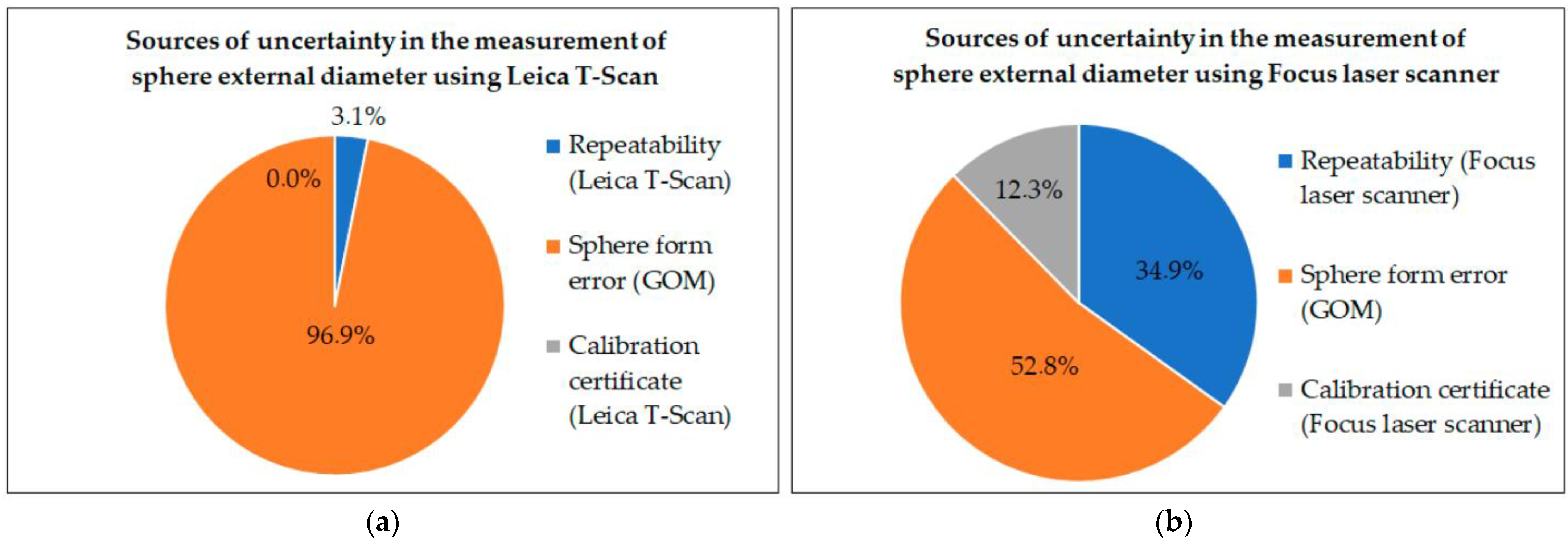
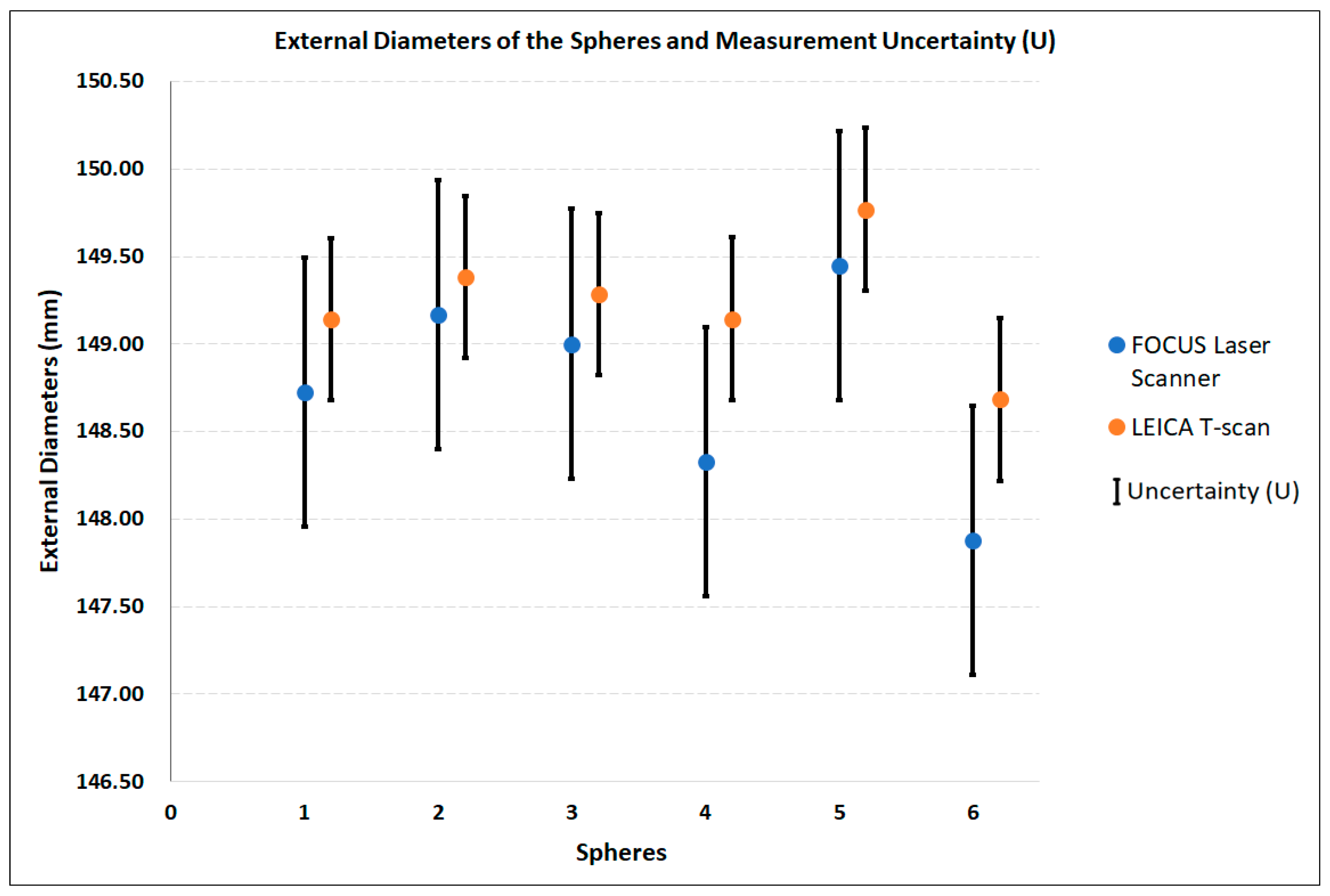
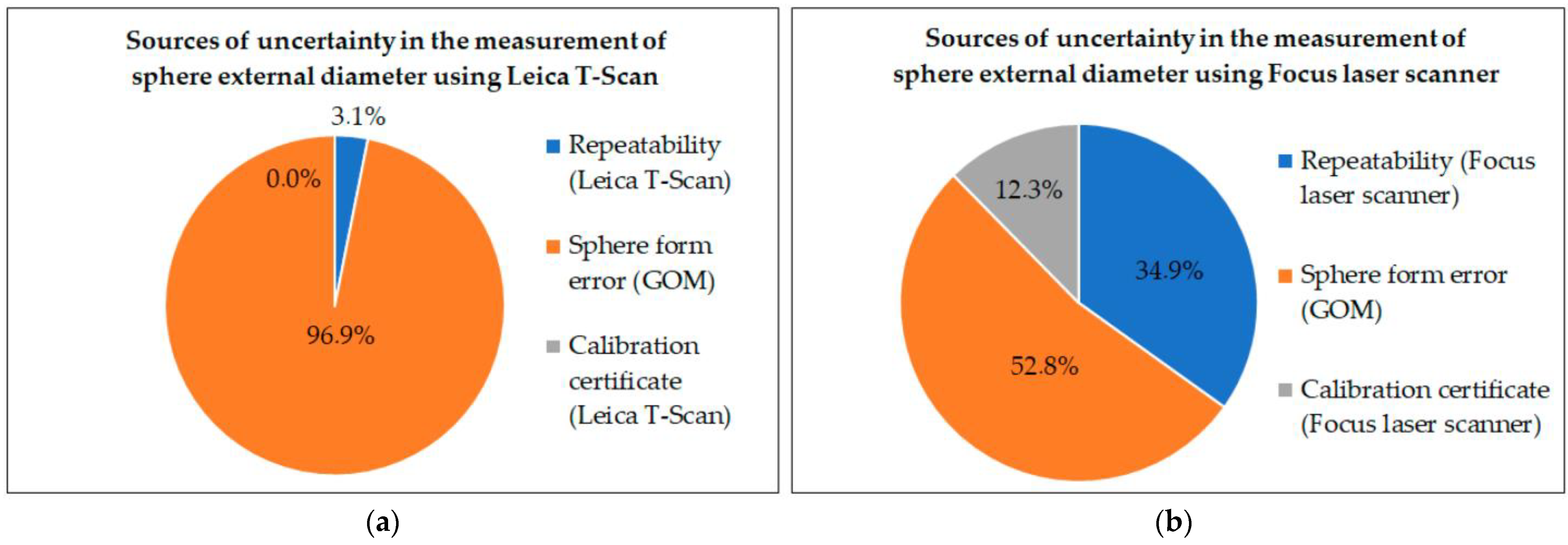
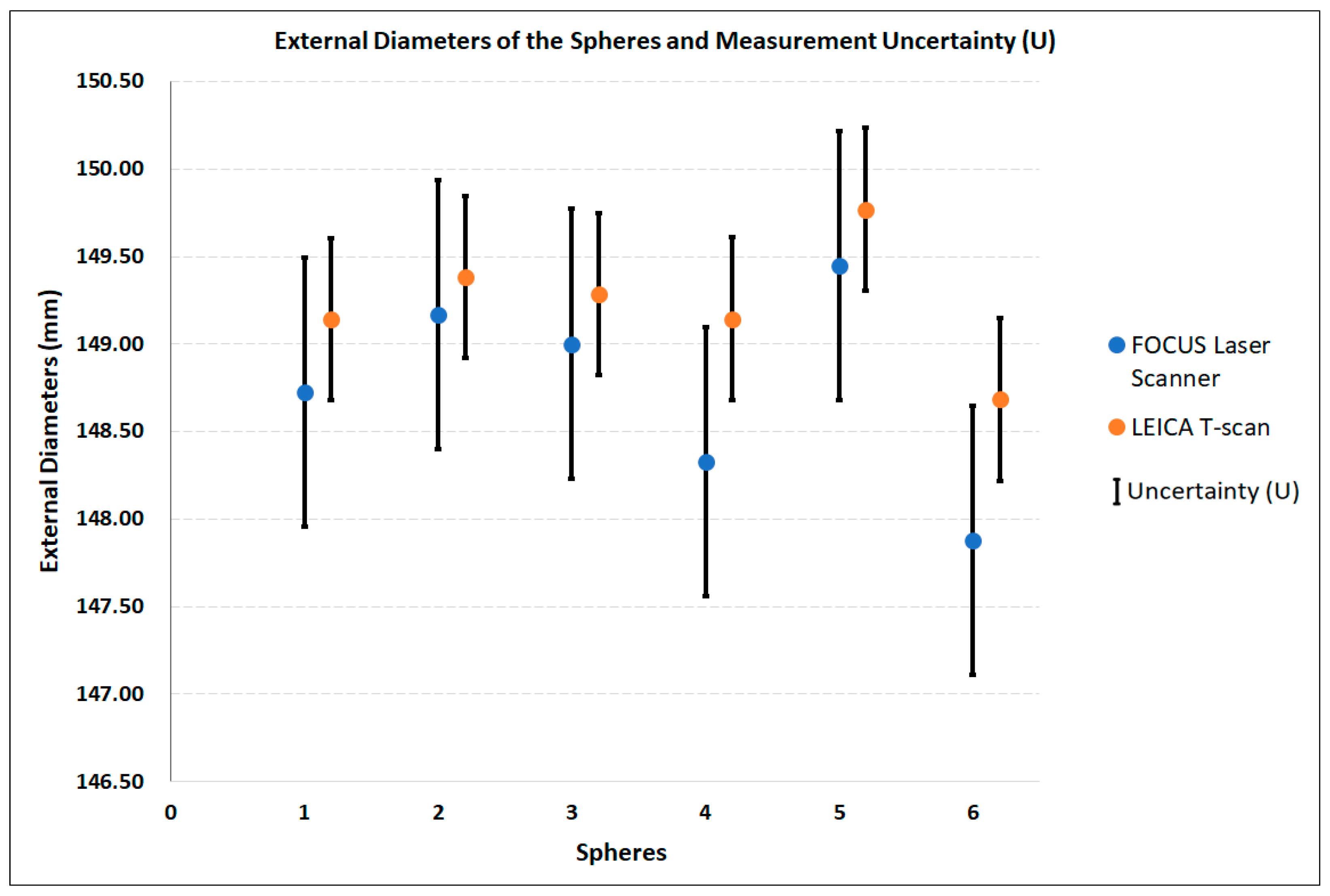
3.2. Measurement of the External Diameters of the Spheres with Leica T-Scan and Focus Laser Scanner, and Estimates of Measurement Uncertainties
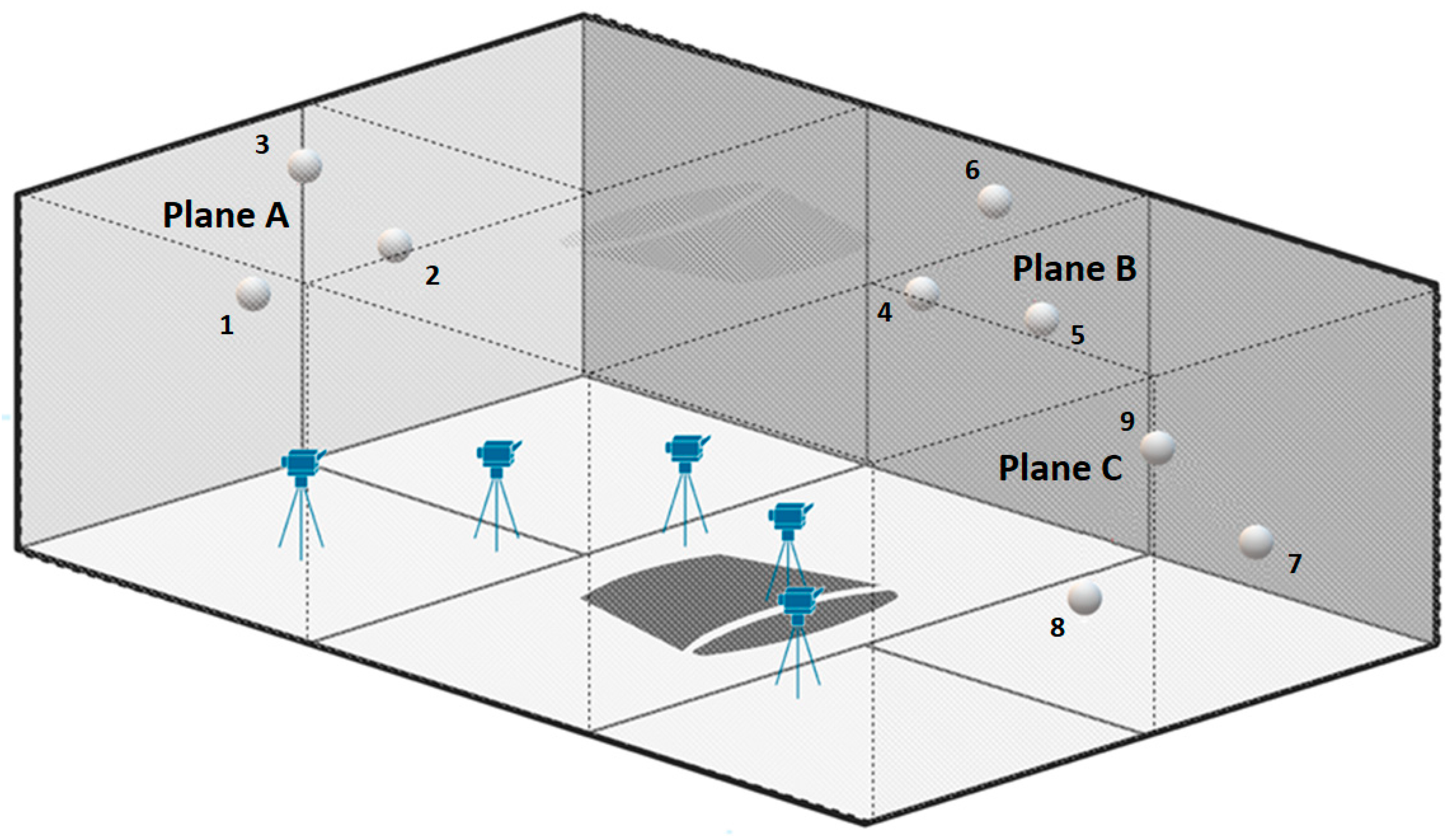
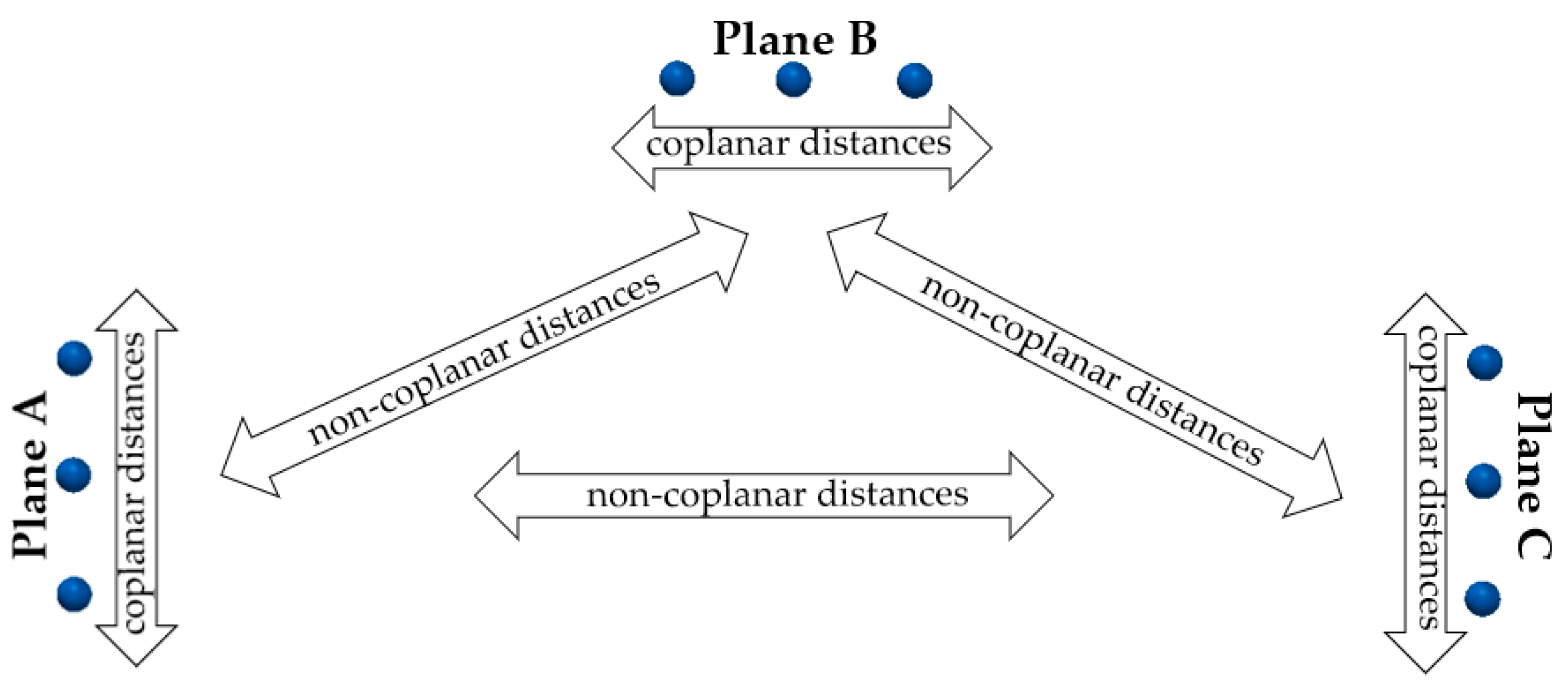
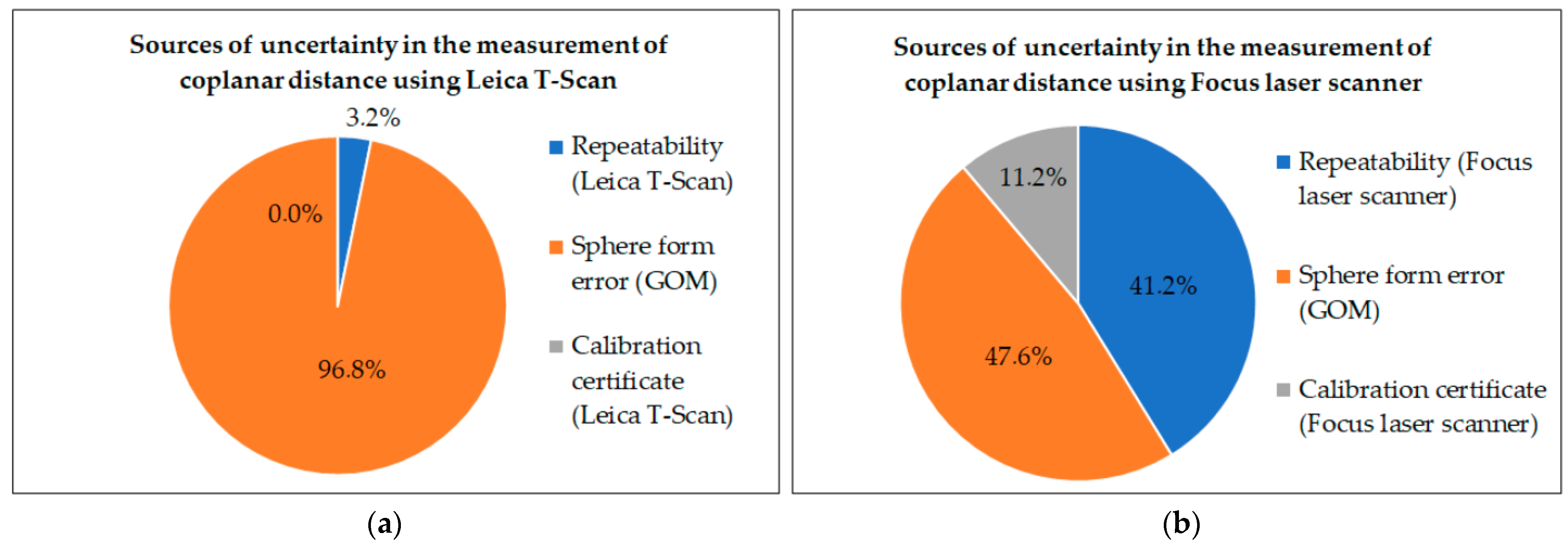
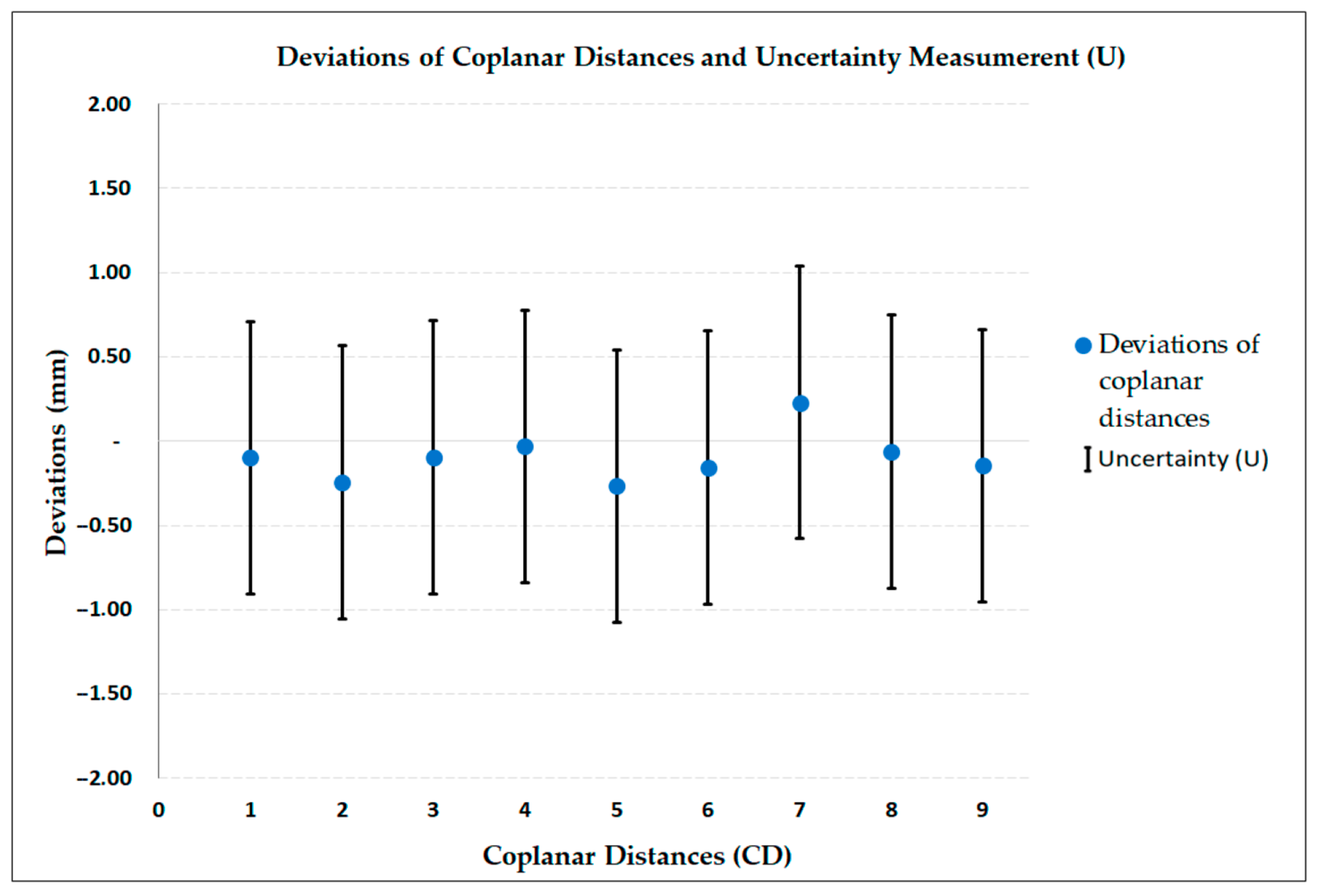
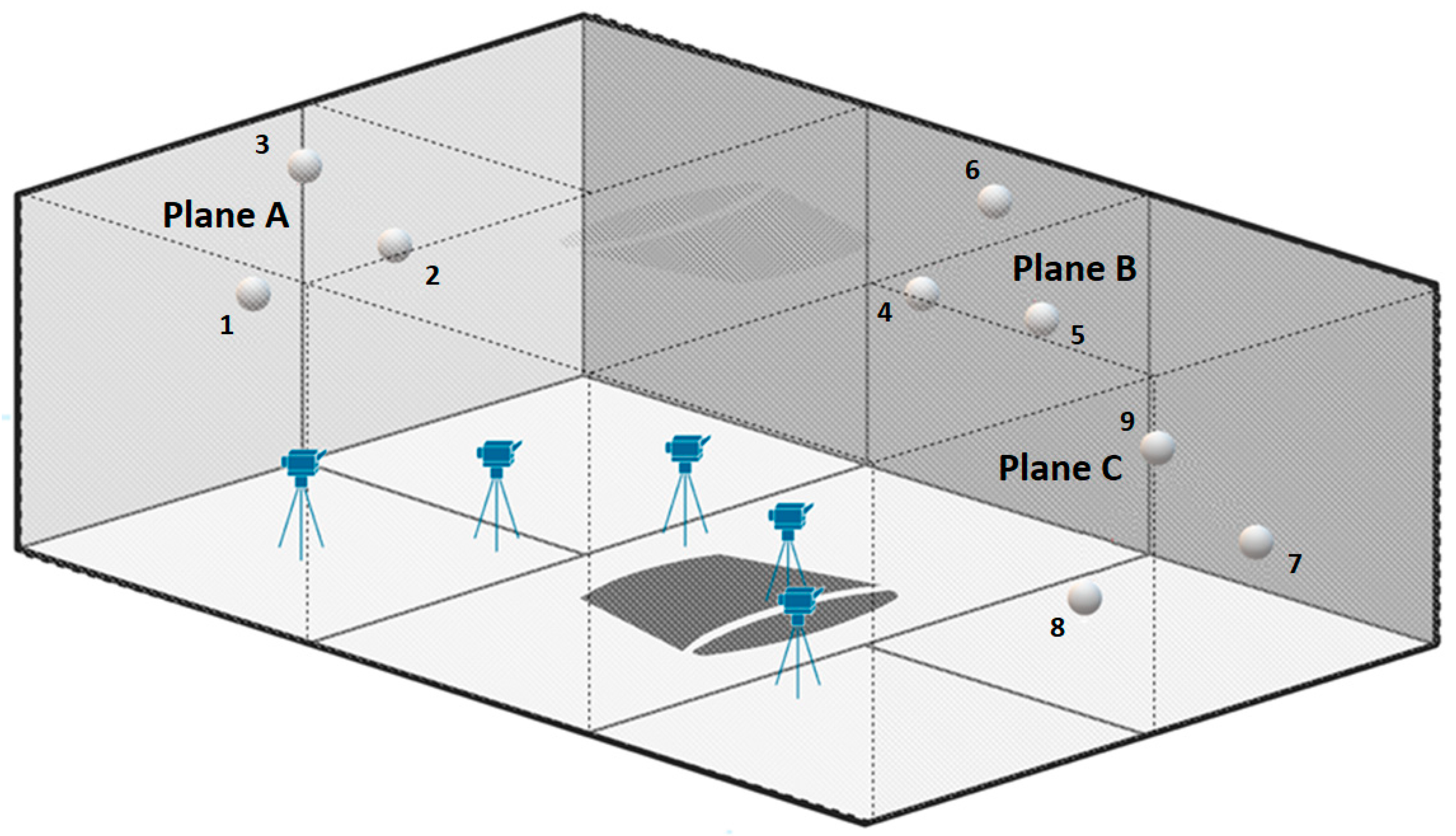
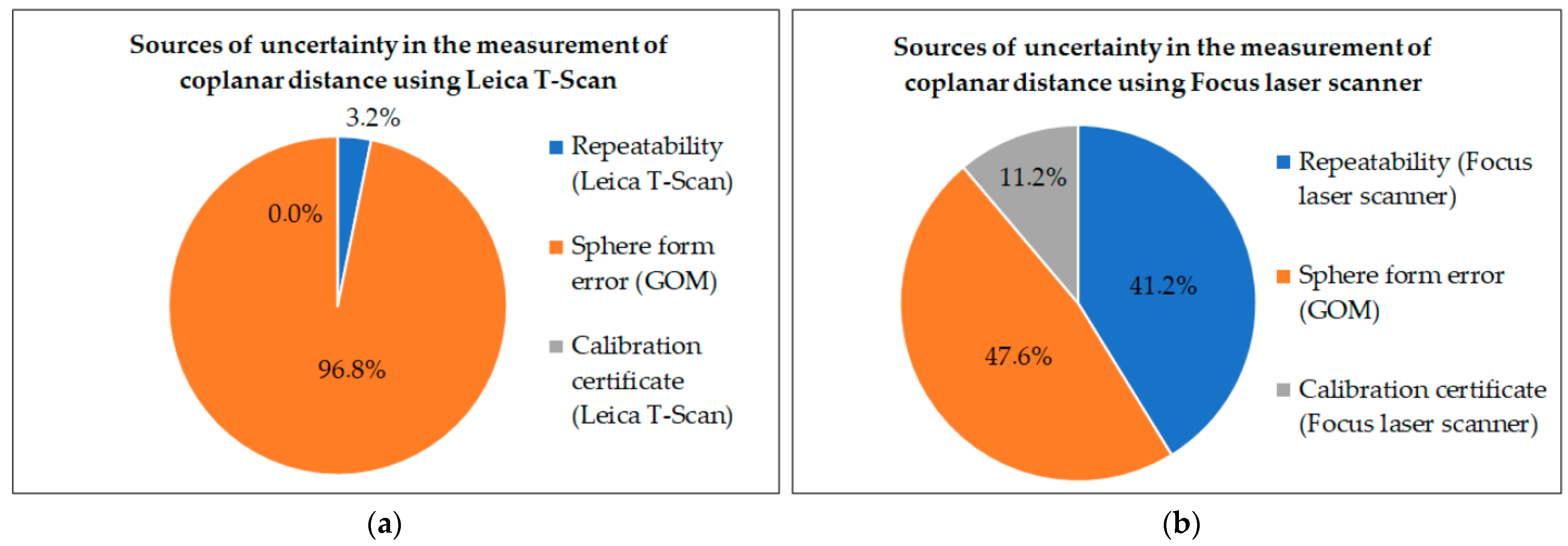
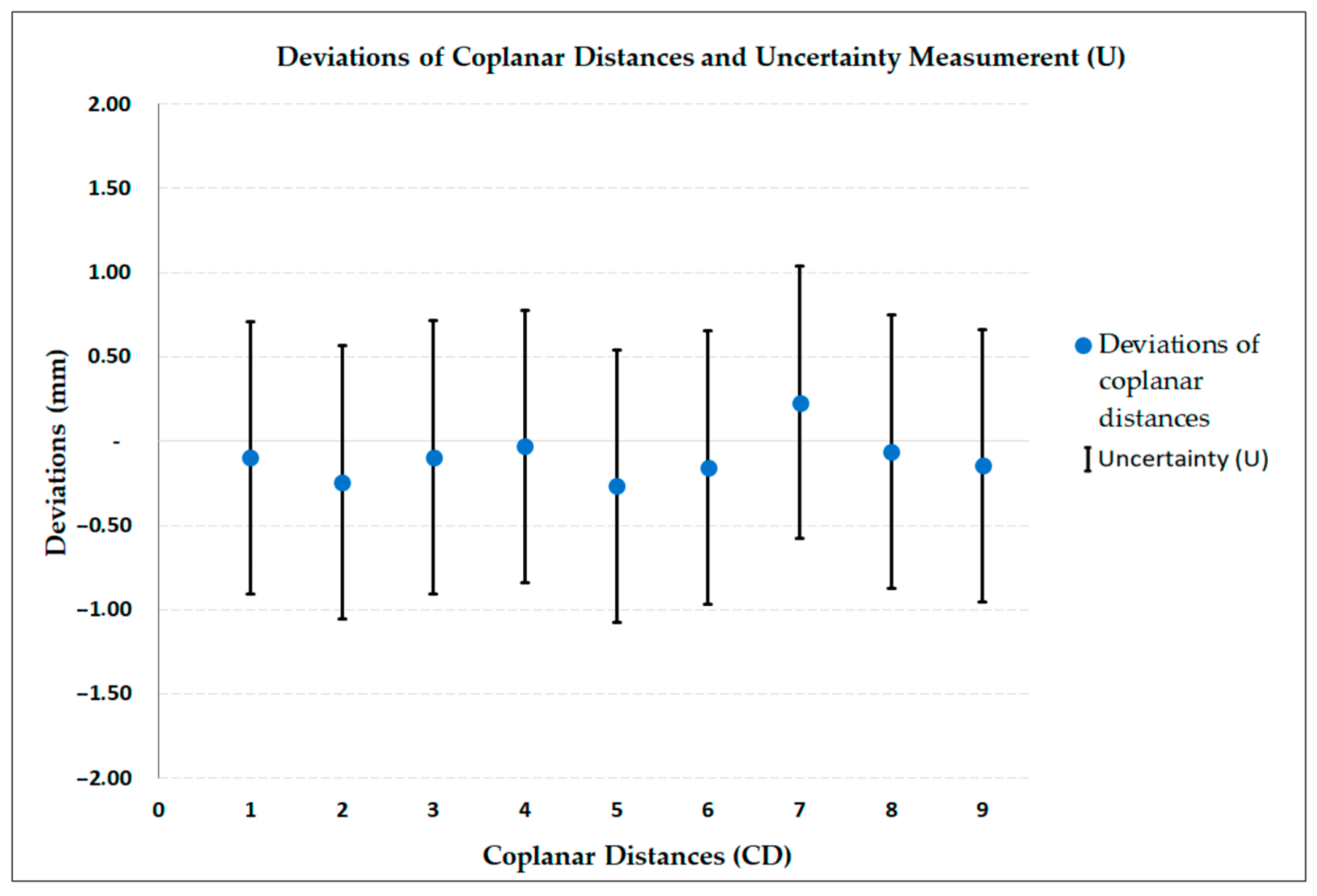
3.3. Measurement of Coplanar Distances with Leica T-Scan and Focus Laser Scanner, and Estimates of Measurement Uncertainties
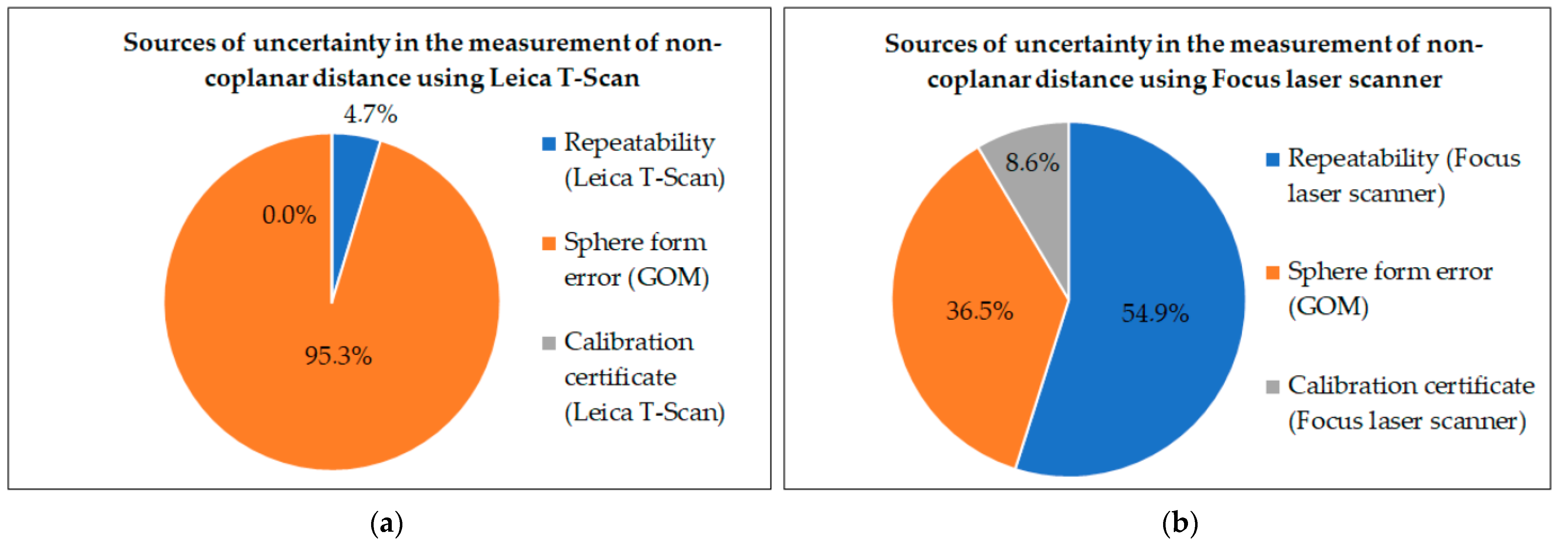
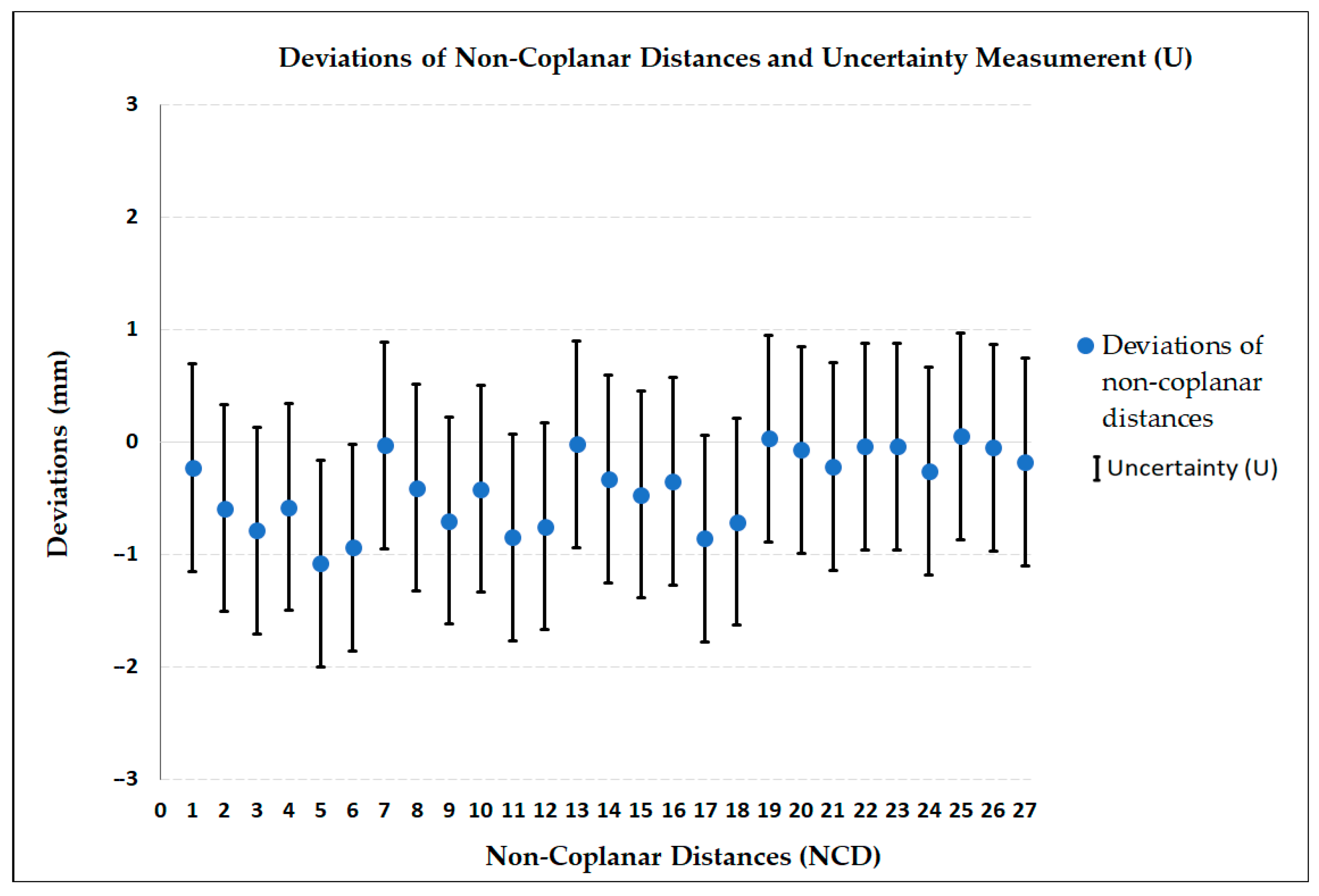
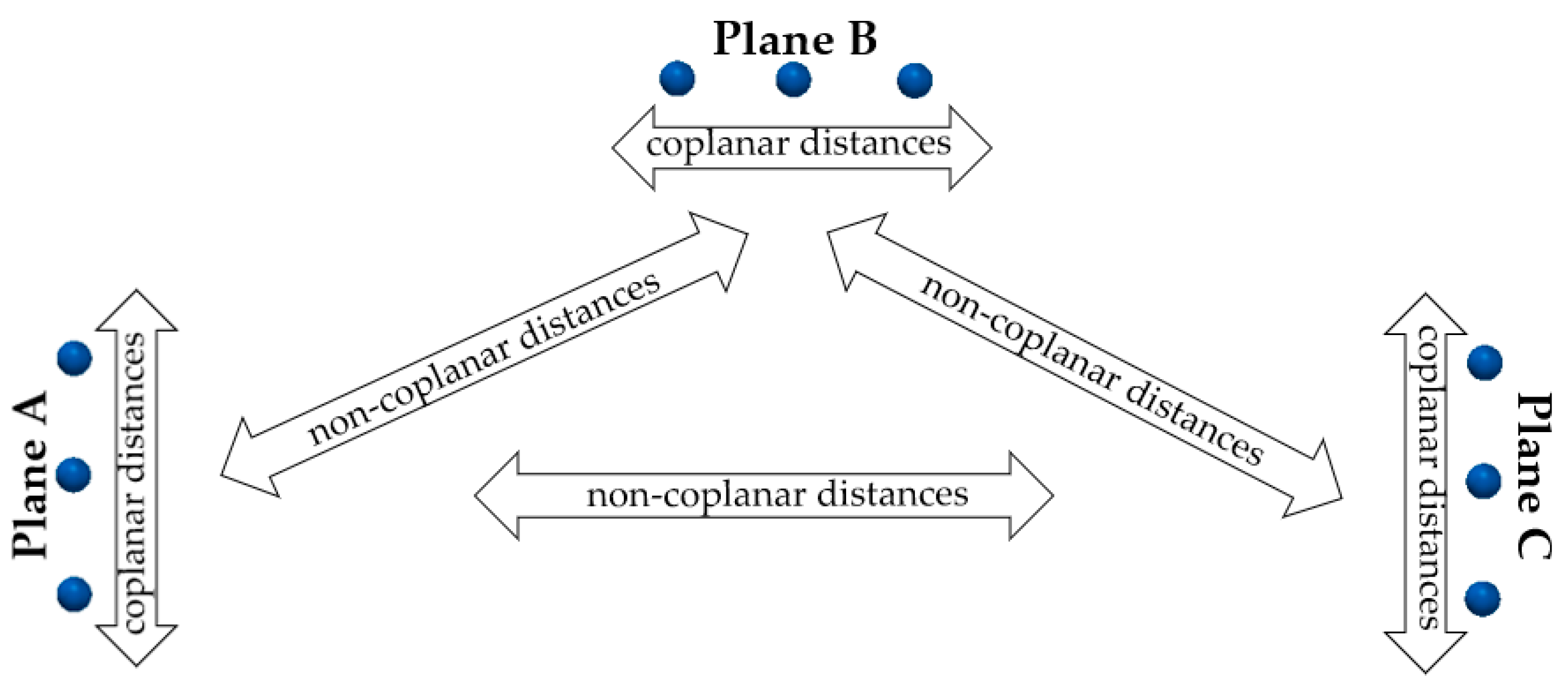
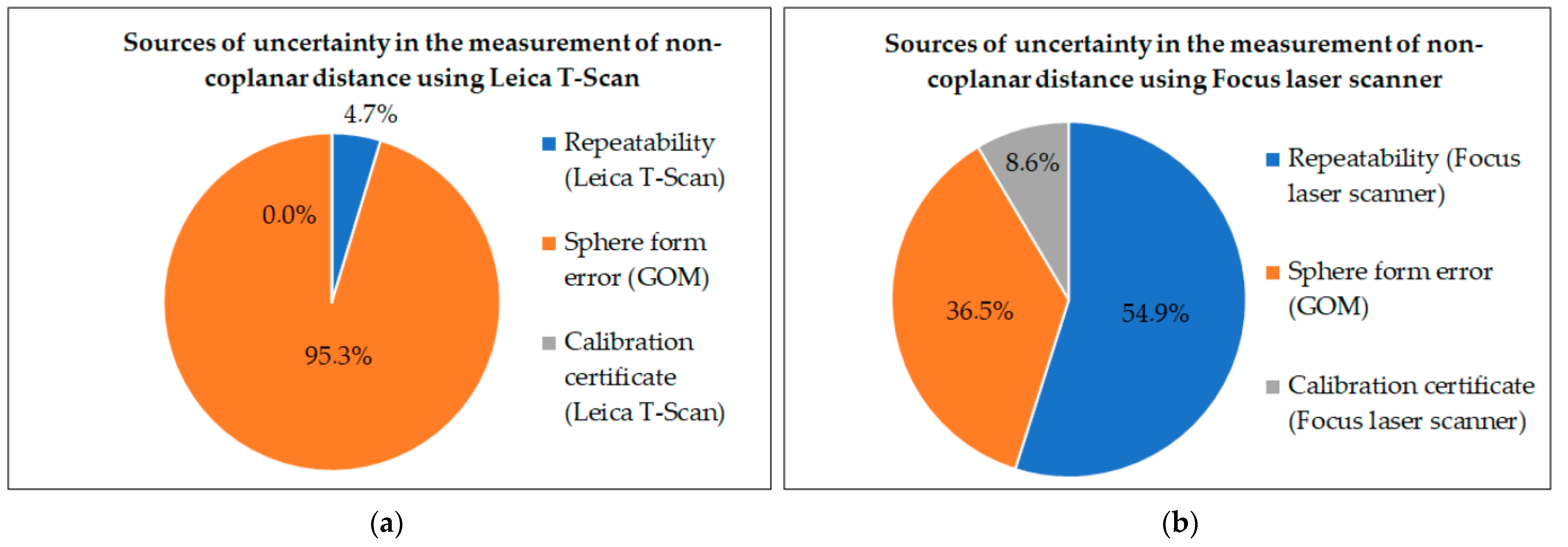
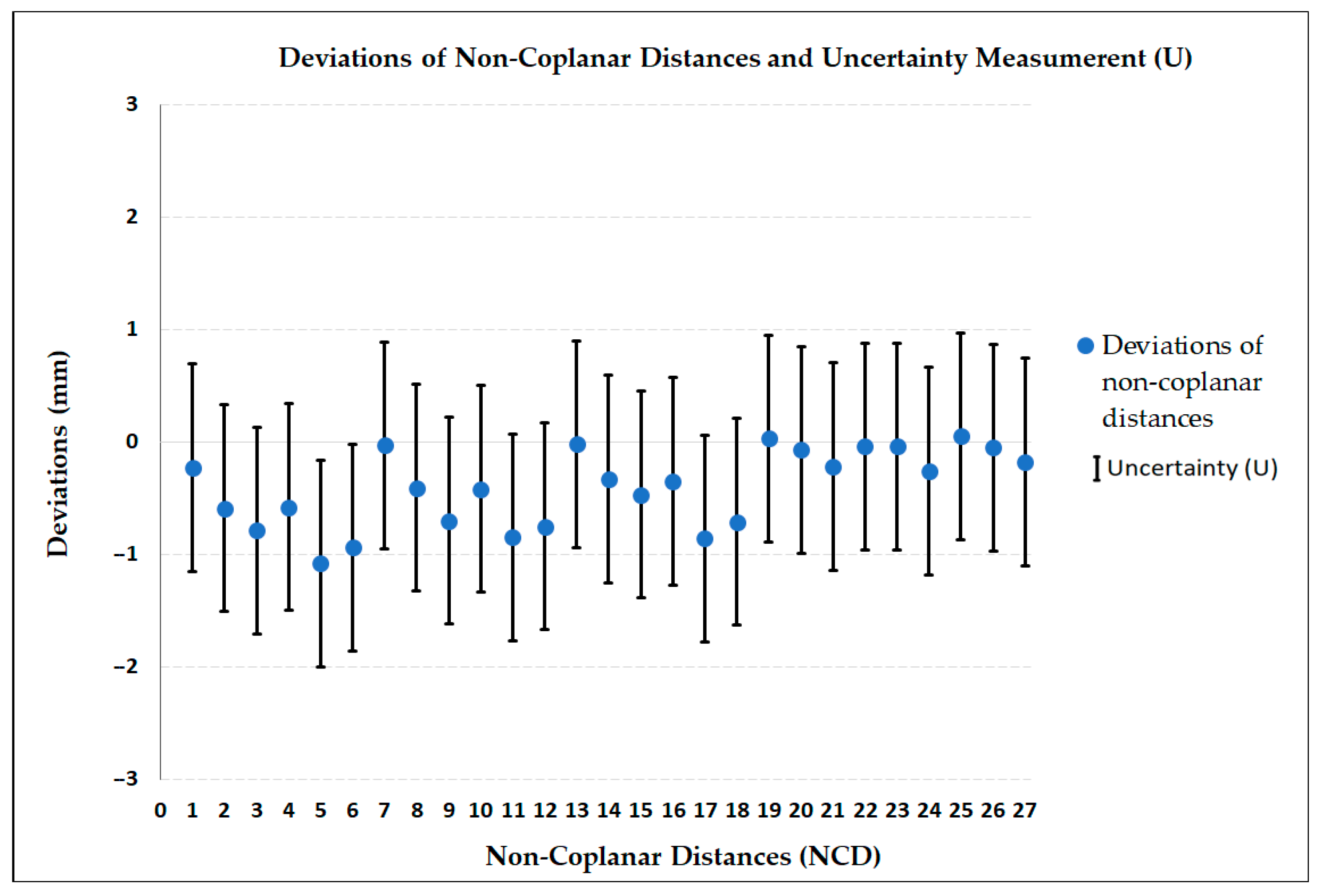
3.4. Measurement of Non-Coplanar Distances with Leica T-Scan and Focus Laser Scanner, and Estimates of Measurement Uncertainties
4. Discussion
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Albertazzi, A.; Souza, A.R. Fundamentos de Metrologia Científica e Industrial, 1st ed.; Manole: Barueri, Brazil, 2008; pp. 1–15. [Google Scholar]
- Neto, J.C.D.S. Metrologia e Controle Dimensional: Conceitos, Normas e Aplicações, 2nd ed.; Elsevier: Rio de Janeiro, Brazil, 2018; pp. 39–145. [Google Scholar]
- Sladek, J.A. Chapter 1—Introduction. In Coordinate Metrology: Accuracy of Systems and Measurements; Springer Tracts in Mechanical Engineering: Berlin, Germany, 2016; pp. 1–9. [Google Scholar]
- Schmitt, R.H.; Peterek, M.; Morse, E.; Knapp, W.; Galetto, M.; Härtig, F.; Goch, G.; Hughes, B.; Forbes, A.; Estler, W.T. Advances in Large-Scale Metrology—Review and future trends. CIRP Ann.–Manuf. Technol. 2016, 65, 643–665. [Google Scholar] [CrossRef]
- Beraldin, J.A.; Blais, F.; El-Hakim, S.F.; Cournoyer, L.; Picard, M. Traceable 3D Imaging Metrology: Evaluation of 3D Digitizing Techniques in a Dedicated Metrology Laboratory. In Proceedings of the 8th Conference on Optical 3-D Measurement Techniques, Zurich, Switzerland, 9–12 July 2007; pp. 310–318. [Google Scholar]
- Wang, L.; Muralikrishnan, B.; Lee, V.; Rachakonda, P.; Sawyer, D.; Gleason, J. A first realization of ASTM E3125-17 test procedures for laser scanner performance evaluation. Measurement 2020, 153, 107398. [Google Scholar] [CrossRef]
- Javaid, M.; Haleem, A.; Singh, R.P.; Suman, R. Industrial perspectives of 3D scanning: Features, roles and it’s analytical applications. Sens. Int. 2021, 2, 100114. [Google Scholar] [CrossRef]
- Shi, S.; Muralikrishnan, B.; Sawyer, D. Terrestrial laser scanner calibration and performance evaluation using the network method. Opt. Lasers Eng. 2020, 134, 106298. [Google Scholar] [CrossRef] [PubMed]
- Wang, W.; Zhao, W.; Huang, L.; Vimarlund, V.; Wang, Z. Applications of terrestrial laser scanning for tunnels: A review. J. Traffic Transp. Eng. 2014, 1, 325–337. [Google Scholar] [CrossRef]
- Fröhlich, C.; Mettenleiter, M. Terrestrial laser scanning—New perspectives in 3D surveying. Intern. Arch. Photogramm.-Remote Sens. Spat. Inform. Sci. 2004, 36, 7–13. [Google Scholar]
- Schwenke, H.; Warmann, C. High Speed High Accuracy Multilateration System Based on Tracking Interferometers. In Proceedings of the IMEKO TC14 Symposium on Laser Metrology for Precision Measurement and Inspection in Industry, Braunschweig, Germany, 12–14 September 2011. [Google Scholar]
- Clarke, T.A.; Wang, X.; Cross, N.R.; Forbes, A.B.; Fossati, P.M. Performance Verification for Large Volume Metrology Systems. In Laser Metrology and Machine Performance V; Peggs, G.N., Ed.; WIT Transactions on Engineering Sciences: London, UK, 2001; Volume 34, pp. 105–116. [Google Scholar]
- Vagovský, J.; Buranský, I.; Görög, A. Evaluation of Measuring Capability of the Optical 3D Scanner. Procedia Eng. 2015, 100, 1198–1206. [Google Scholar] [CrossRef]
- Ramesh, L.K. Measuring the Accuracy of Digitization of Contactless Scanners. Master’s Thesis, Technical University of Liberec, Liberec, Czech Republic, 19 May 2022. [Google Scholar]
- Kantaros, A.; Ganetsos, T.; Petrescu, F.I.T. Three-Dimensional Printing and 3D Scanning: Emerging Technologies Exhibiting High Potential in the Field of Cultural Heritage. Appl. Sci. 2023, 13, 4777. [Google Scholar] [CrossRef]
- Haleem, A.; Javaid, M. 3D scanning applications in medical field: A literature-based review. Clin. Epidemiol. Glob. Health 2019, 7, 199–210. [Google Scholar] [CrossRef]
- Ganetsos, T.; Kantaros, A.; Gioldasis, N.; Brachos, K. Applications of 3D Printing and Illustration in Industry. In Proceedings of the 17th International Conference on Engineering of Modern Electric Systems, Oradea, Romania, 9–10 June 2023; pp. 1–4. [Google Scholar]
- FARO. FARO Laser Scanner Manual. 2021. Available online: https://downloads.faro.com/index.php/s/zfzkF37J5M4iafj?dir=undefined&openfile=120330 (accessed on 2 October 2023).
- Azam, A.; Alshehri, A.H.; Alharthai, M.; El-Banna, M.M.; Yosri, A.M.; Beshr, A.A.A. Applications of Terrestrial Laser Scanner in Detecting Pavement Surface Defects. Processes 2023, 11, 1370. [Google Scholar] [CrossRef]
- Xiao, J.; Hu, X.; Lu, W.; Ma, J.; Guo, X. A new three-dimensional laser scanner design and its performance analysis. Optik 2015, 126, 701–707. [Google Scholar] [CrossRef]
- Hughes, B.; Forbes, A.; Lewis, A.; Sun, W.; Veal, D.; Nasr, K. Laser tracker error determination using a network measurement. Meas. Sci. Technol. 2011, 22, 45103. [Google Scholar] [CrossRef]
- Leica Geosystems, A.G. Leica AT930/AT960 User Manual. 2015. Available online: https://support.hexagonmi.com/s/article/Leica-Absolute-Tracker-AT930-AT960-User-Manual-v1-2-0en-1528374732805 (accessed on 2 October 2023).
- Nubiola, A.; Slamani, M.; Joubair, A.; Bonev, I.A. Comparison of two calibration methods for a small industrial robot based on an optical CMM and a laser tracker. Robotica 2013, 32, 447–466. [Google Scholar] [CrossRef]
- Muralikrishnan, B.; Shilling, M.; Rachakonda, P.; Ren, W.; Lee, V.; Sawyer, D. Toward the development of a documentary standard for derived-point to derived-point distance performance evaluation of spherical coordinate 3D imaging systems. J. Manuf. Syst. 2015, 37, 550–557. [Google Scholar] [CrossRef]
- Boehler, W.; Vicent, M.B.; Marbs, A. Investigating Laser Scanner Accuracy. Intern. Arch. Photogramm.-Remote Sens. Spat. Inform. Sci. 2003, 34 Pt 5, 696–701. [Google Scholar]
- JCGM/WG 1. JCGM 100: Evaluation of Measurement Data—Guide to the Expression of Uncertainty in Measurement (JCGM 100:2008—GUM 1995 with Minor Corrections). 2008. Available online: https://www.bipm.org/en/publications/guides (accessed on 18 October 2023).
- EA Laboratory Committee. EA 4/02 M: 2022—Evaluation of the Uncertainty of Measurement in Calibration. 2022. Available online: https://european-accreditation.org/publications/ea-4-02-m/ (accessed on 18 October 2023).
- Krummenauer, A.; Gomes, V.E.O.; Nardelli, V.C. Estimation of Measurement Uncertainty of the Real-Time Location System (RTLS) with Ultra-Wideband (UWB) Technology. Metrology 2023, 3, 113–130. [Google Scholar] [CrossRef]
- Peggs, N.; Maropoulos, G.; Hughes, B.; Forbes, B.; Robson, S.; Ziebart, M.; Muralikrishnan, B. Recent developments in large-scale dimensional metrology. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2009, 223, 571–595. [Google Scholar] [CrossRef]
- Leica Geosystems, A.G. Leica T-Scan 5 Quick Guide. 2017. Available online: https://s3.amazonaws.com/hmits/Hardware/Laser+Tracker/Documentation/T+Products/Leica+T-Scan+Quick+Guide+v1.2.0en.pdf (accessed on 26 October 2023).
- Montgomery, D.C. Design and Analysis of Experiments, 8th ed.; John Wiley & Sons: New York, NY, USA, 2013; pp. 65–182. [Google Scholar]
- Montgomery, D.C. Introduction to Statistical Quality, 6th ed.; John Wiley & Sons: New York, NY, USA, 2009; pp. 61–176. [Google Scholar]
- Ten Caten, C.S.; Ribeiro, J.L.D. Projeto de Experimentos; (Academic Press) UFRGS: Porto Alegre, Brazil, 2011; pp. 20–35. Available online: http://www.producao.ufrgs.br/arquivos/disciplinas/117_apostila_pe_2011.pdf (accessed on 18 October 2023).
- Rodrigues, L.G.P.; Coelho, F.R.; Krummenauer, A.; Nardelli, V.C.; França, F.H.R. Two-way ANOVA analysis of novel ALBDF functions obtained for H2O–CO2 gas mixtures considering variable mole fraction ratios in oxy− and air-fuel combustion conditions. J. Quant. Spectrosc. Radiat. Transf. 2024, 320, 108973. [Google Scholar] [CrossRef]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Diameter | Sphere 1 | Sphere 2 | Sphere 3 | Sphere 4 | Sphere 5 | Sphere 6 |
|---|---|---|---|---|---|---|
| Ø1 | 149.116 | 149.730 | 149.483 | 149.755 | 150.213 | 148.932 |
| Ø2 | 149.298 | 149.858 | 149.507 | 149.766 | 150.030 | 148.750 |
| Ø3 | 149.409 | 149.809 | 149.470 | 149.715 | 150.164 | 148.917 |
| Ø4 | 149.115 | 149.730 | 149.312 | 149.398 | 150.313 | 149.217 |
| Ø5 | 149.005 | 149.386 | 149.447 | 149.411 | 150.513 | 148.809 |
| Ø6 | 149.111 | 149.385 | 149.386 | 149.308 | 150.247 | 148.501 |
| Sphere form error | 0.404 | 0.473 | 0.195 | 0.458 | 0.483 | 0.716 |
| Diameter | Sphere 1 | Sphere 2 | Sphere 3 | Sphere 4 | Sphere 5 | Sphere 6 |
|---|---|---|---|---|---|---|
| Measure 1 | 149.196 | 149.420 | 149.349 | 149.133 | 149.791 | 148.685 |
| Measure 2 | 149.155 | 149.310 | 149.227 | 149.001 | 149.689 | 148.587 |
| Measure 3 | 149.190 | 149.332 | 149.236 | 149.093 | 149.635 | 148.746 |
| Measure 4 | 149.103 | 149.394 | 149.288 | 149.181 | 149.784 | 148.792 |
| Measure 5 | 149.126 | 149.422 | 149.306 | 149.212 | 149.871 | 148.698 |
| Measure 6 | 149.085 | 149.418 | 149.305 | 149.238 | 149.846 | 148.605 |
| Mean | 149.143 | 149.383 | 149.285 | 149.143 | 149.769 | 148.686 |
| SD | 0.046 | 0.049 | 0.046 | 0.087 | 0.091 | 0.079 |
| Diameter | Sphere 1 | Sphere 2 | Sphere 3 | Sphere 4 | Sphere 5 | Sphere 6 |
|---|---|---|---|---|---|---|
| Measure 1 | 148.465 | 149.139 | 148.924 | 148.396 | 149.634 | 147.231 |
| Measure 2 | 148.469 | 148.994 | 148.939 | 148.241 | 149.382 | 147.989 |
| Measure 3 | 148.584 | 149.657 | 149.270 | 147.973 | 148.965 | 147.509 |
| Measure 4 | 149.049 | 149.306 | 149.119 | 148.415 | 149.856 | 148.133 |
| Measure 5 | 149.345 | 149.229 | 149.142 | 148.690 | 149.762 | 148.257 |
| Measure 6 | 148.440 | 148.683 | 148.615 | 148.263 | 149.082 | 148.146 |
| Mean | 148.725 | 149.168 | 149.001 | 148.330 | 149.447 | 147.877 |
| SD | 0.380 | 0.325 | 0.230 | 0.237 | 0.366 | 0.412 |
| Input Quantity | Estimate (mm) | Probability Distribution | Divider | Standard Uncertainty (mm) | Sensitivity Coefficient | Contribution to Standard Uncertainty (mm) | Degrees of Freedom |
|---|---|---|---|---|---|---|---|
| Repeatability (Leica T-Scan) | 0.091 | t-Student | n = 6 | 0.037147 | 1 | 0.037147 | 5 |
| Sphere form error (GOM) | 0.716 | Rectangular | 0.206691 | 1 | 0.206691 | ∞ | |
| Calibration certificate (Leica T-Scan) | 0.0012 | Normal | 0.000600 | 1 | 0.000600 | ∞ | |
| Uncorrected error (Leica T-Scan) | |−0.045| | = 0.47 mm | = 2.00 | = 0.2100 mm | = 5107 |
| Input Quantity | Estimate (mm) | Probability Distribution | Divider | Standard Uncertainty (mm) | Sensitivity Coefficient | Contribution to Standard Uncertainty (mm) | Degrees of Freedom |
|---|---|---|---|---|---|---|---|
| Repeatability (Focus laser scanner) | 0.412 | t-Student | n = 6 | 0.168098 | 1 | 0.168098 | 5 |
| Sphere form error (GOM) | 0.716 | rectangular | 0.206691 | 1 | 0.206691 | ∞ | |
| Calibration certificate (Focus laser scanner) | 0.20 | Normal | 0.100000 | 1 | 0.100000 | ∞ | |
| Uncorrected error (Focus laser scanner) | |0.18| | = 0.77 mm | = 2.06 | = 0.2846 mm | = 41 |
| Sphere | Method | External Diameters Mean, mm | Difference between Means (Deviation), mm | Decision Limit, mm | Decision |
|---|---|---|---|---|---|
| 1 | Focus | 148.73 | −0.42 | 1.32 | NSDif |
| T-Scan | 149.14 | ||||
| 2 | Focus | 149.17 | −0.21 | NSDif | |
| T-Scan | 149.38 | ||||
| 3 | Focus | 149.00 | −0.29 | NSDif | |
| T-Scan | 149.29 | ||||
| 4 | Focus | 148.33 | −0.81 | NSDif | |
| T-Scan | 149.14 | ||||
| 5 | Focus | 149.45 | −0.32 | NSDif | |
| T-Scan | 149.77 | ||||
| 6 | Focus | 147.88 | −0.81 | NSDif | |
| T-Scan | 148.69 |
| Plan | Tag | Focus Laser Scanner | Leica T-Scan | Deviation | ||
|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | |||
| A | CD 1 | 1000.80 | 0.291 | 1000.90 | 0.035 | −0.10 |
| A | CD 2 | 711.11 | 0.018 | 711.35 | 0.068 | −0.24 |
| A | CD 3 | 704.23 | 0.104 | 704.33 | 0.092 | −0.10 |
| B | CD 4 | 1000.85 | 0.342 | 1000.88 | 0.069 | −0.03 |
| B | CD 5 | 708.67 | 0.471 | 708.93 | 0.078 | −0.26 |
| B | CD 6 | 713.19 | 0.260 | 713.34 | 0.027 | −0.15 |
| C | CD 7 | 991.44 | 0.024 | 991.21 | 0.037 | 0.23 |
| C | CD 8 | 702.70 | 0.033 | 702.76 | 0.017 | −0.06 |
| C | CD 9 | 704.26 | 0.069 | 704.41 | 0.031 | −0.15 |
| Input Quantity | Estimate (mm) | Probability Distribution | Divider | Standard Uncertainty (mm) | Sensitivity Coefficient | Contribution to Standard Uncertainty (mm) | Degrees of Freedom |
|---|---|---|---|---|---|---|---|
| Repeatability (Leica T-Scan) | 0.092 | t-Student | n = 6 | 0.037417 | 1 | 0.037417 | 5 |
| Sphere form error (GOM) | 0.716 | rectangular | 0.206691 | 1 | 0.206691 | ∞ | |
| Calibration certificate (Leica T-Scan) | 0.0012 | normal | 0.000600 | 1 | 0.000600 | ∞ | |
| Uncorrected error (Leica T-Scan) | |−0.045| | = 0.47 mm | = 2.00 | = 0.2101 mm | = 4966 |
| Input Quantity | Estimate (mm) | Probability Distribution | Divider | Standard Uncertainty (mm) | Sensitivity Coefficient | Contribution to Standard Uncertainty (mm) | Degrees of Freedom |
|---|---|---|---|---|---|---|---|
| Repeatability Focus Laser Scanner | 0.471 | t-Student | n = 6 | 0.192154 | 1 | 0.192154 | 5 |
| Sphere form error (GOM) | 0.716 | rectangular | 0.206691 | 1 | 0.206691 | ∞ | |
| Calibration certificate (Focus laser scanner) | 0.20 | normal | 0.100000 | 1 | 0.100000 | ∞ | |
| Uncorrected error (Focus laser scanner) | |0.18| | = 0.81 mm | = 2.09 | = 0.2994 mm | = 29 |
| Plan | Tag | Focus Laser Scanner | Leica T-Scan | Deviation | ||
|---|---|---|---|---|---|---|
| Mean | SD | Mean | SD | |||
| AB | NCD 1 | 5101.11 | 0.082 | 5101.34 | 0.080 | −0.23 |
| AB | NCD 2 | 5981.65 | 0.302 | 5982.24 | 0.061 | −0.59 |
| AB | NCD 3 | 5549.20 | 0.264 | 5549.99 | 0.060 | −0.79 |
| AC | NCD 4 | 10,130.20 | 0.436 | 10,130.78 | 0.098 | −0.58 |
| AC | NCD 5 | 10,078.03 | 0.621 | 10,079.11 | 0.023 | −1.08 |
| AC | NCD 6 | 10,103.91 | 0.413 | 10,104.85 | 0.082 | −0.94 |
| AB | NCD 7 | 4674.17 | 0.401 | 4674.20 | 0.074 | −0.03 |
| AB | NCD 8 | 5623.35 | 0.040 | 5623.76 | 0.061 | −0.41 |
| AB | NCD 9 | 5160.47 | 0.190 | 5161.17 | 0.055 | −0.70 |
| AC | NCD 10 | 10,088.49 | 0.254 | 10,088.91 | 0.081 | −0.42 |
| AC | NCD 11 | 10,134.48 | 0.480 | 10,135.33 | 0.092 | −0.85 |
| AC | NCD 12 | 10,111.56 | 0.295 | 10,112.31 | 0.112 | −0.75 |
| AB | NCD 13 | 4893.85 | 0.321 | 4893.87 | 0.099 | −0.02 |
| AB | NCD 14 | 5805.85 | 0.091 | 5806.18 | 0.073 | −0.33 |
| AB | NCD 15 | 5312.05 | 0.137 | 5312.52 | 0.054 | −0.47 |
| AC | NCD 16 | 10,112.65 | 0.378 | 10,113.00 | 0.085 | −0.35 |
| AC | NCD 17 | 10,110.45 | 0.592 | 10,111.31 | 0.036 | −0.86 |
| AC | NCD 18 | 10,086.72 | 0.406 | 10,087.43 | 0.076 | −0.71 |
| BC | NCD 19 | 5929.33 | 0.354 | 5929.30 | 0.062 | 0.03 |
| BC | NCD 20 | 6270.86 | 0.317 | 6270.93 | 0.081 | −0.07 |
| BC | NCD 21 | 6103.83 | 0.304 | 6104.05 | 0.077 | −0.22 |
| BC | NCD 22 | 4974.00 | 0.365 | 4974.04 | 0.012 | −0.04 |
| BC | NCD 23 | 5377.07 | 0.380 | 5377.11 | 0.036 | −0.04 |
| BC | NCD 24 | 5179.61 | 0.341 | 5179.87 | 0.027 | −0.26 |
| BC | NCD 25 | 5482.96 | 0.313 | 5482.91 | 0.046 | 0.05 |
| BC | NCD 26 | 5851.32 | 0.259 | 5851.37 | 0.062 | −0.05 |
| BC | NCD 27 | 5626.30 | 0.261 | 5626.48 | 0.028 | −0.18 |
| Input Quantity | Estimate (mm) | Probability Distribution | Divider | Standard Uncertainty (mm) | Sensitivity Coefficient | Contribution to Standard Uncertainty (mm) | Degrees of Freedom |
|---|---|---|---|---|---|---|---|
| Repeatability (Leica T-Scan) | 0.112 | t-Student | n = 6 | 0.045784 | 1 | 0.0045784 | 5 |
| Sphere form error (GOM) | 0.716 | rectangular | 0.206691 | 1 | 0.206691 | ∞ | |
| Calibration certificate (Leica T-Scan) | 0.0012 | normal | 0.000600 | 1 | 0.000600 | ∞ | |
| Uncorrected error (Leica T-Scan) | |−0.045| | = 0.47 mm | = 2.00 | = 0.2117 mm | = 2285 |
| Input Quantity | Estimate (mm) | Probability Distribution | Divider | Standard Uncertainty (mm) | Sensitivity Coefficient | Contribution to Standard Uncertainty (mm) | Degrees of Freedom |
|---|---|---|---|---|---|---|---|
| Repeatability Focus laser scanner | 0.621 | t-Student | n = 6 | 0.253318 | 1 | 0.253318 | 5 |
| Sphere form error (GOM) | 0.716 | Rectangular | 0.206691 | 1 | 0.206691 | ∞ | |
| Calibration certificate (Focus laser scanner) | 0.20 | Normal | 0.100000 | 1 | 0.100000 | ∞ | |
| Uncorrected error (Focus laser scanner) | |0.18| | = 0.92 mm | = 2.17 | = 0.3419 mm | = 16 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Krummenauer, A.; Bergamo, D.; Soares, R.S.; Gomes, V.E.d.O.; Nardelli, V.C. Comparison of Dimensional Accuracy between a Laser Scanner and a Laser Tracker with Handheld Scan in a Laboratory Setting. Metrology 2024, 4, 205-226. https://doi.org/10.3390/metrology4020013
Krummenauer A, Bergamo D, Soares RS, Gomes VEdO, Nardelli VC. Comparison of Dimensional Accuracy between a Laser Scanner and a Laser Tracker with Handheld Scan in a Laboratory Setting. Metrology. 2024; 4(2):205-226. https://doi.org/10.3390/metrology4020013
Chicago/Turabian StyleKrummenauer, Alex, Douglas Bergamo, Roberto Serpa Soares, Victor Emmanuel de Oliveira Gomes, and Vitor Camargo Nardelli. 2024. "Comparison of Dimensional Accuracy between a Laser Scanner and a Laser Tracker with Handheld Scan in a Laboratory Setting" Metrology 4, no. 2: 205-226. https://doi.org/10.3390/metrology4020013
APA StyleKrummenauer, A., Bergamo, D., Soares, R. S., Gomes, V. E. d. O., & Nardelli, V. C. (2024). Comparison of Dimensional Accuracy between a Laser Scanner and a Laser Tracker with Handheld Scan in a Laboratory Setting. Metrology, 4(2), 205-226. https://doi.org/10.3390/metrology4020013