


Combined Use of Acoustic Measurement Techniques with X-ray Imaging for Real-Time Observation of Laser-Based Manufacturing


Abstract
1. Introduction
2. Synchrotron X-ray Applications in Monitoring Dynamic Phenomena for Laser-Based Manufacturing
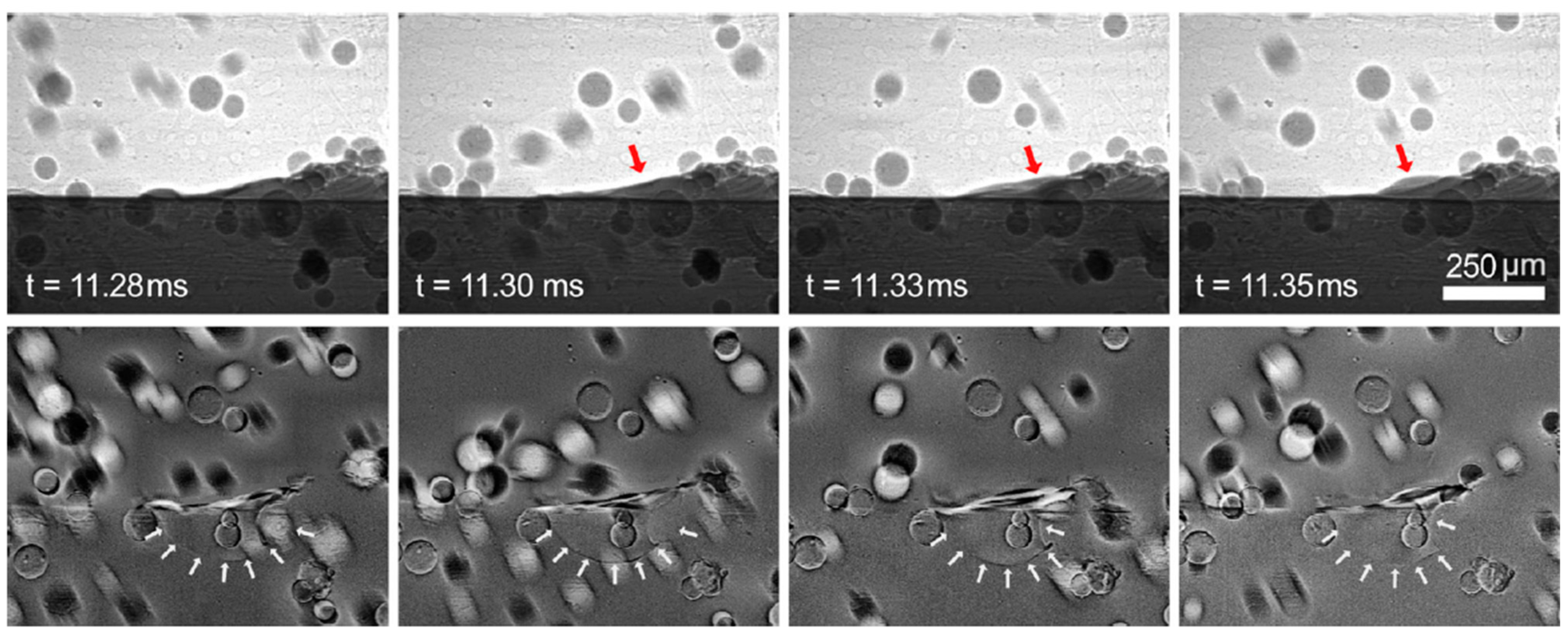
2.1. Melt Pool Dynamics
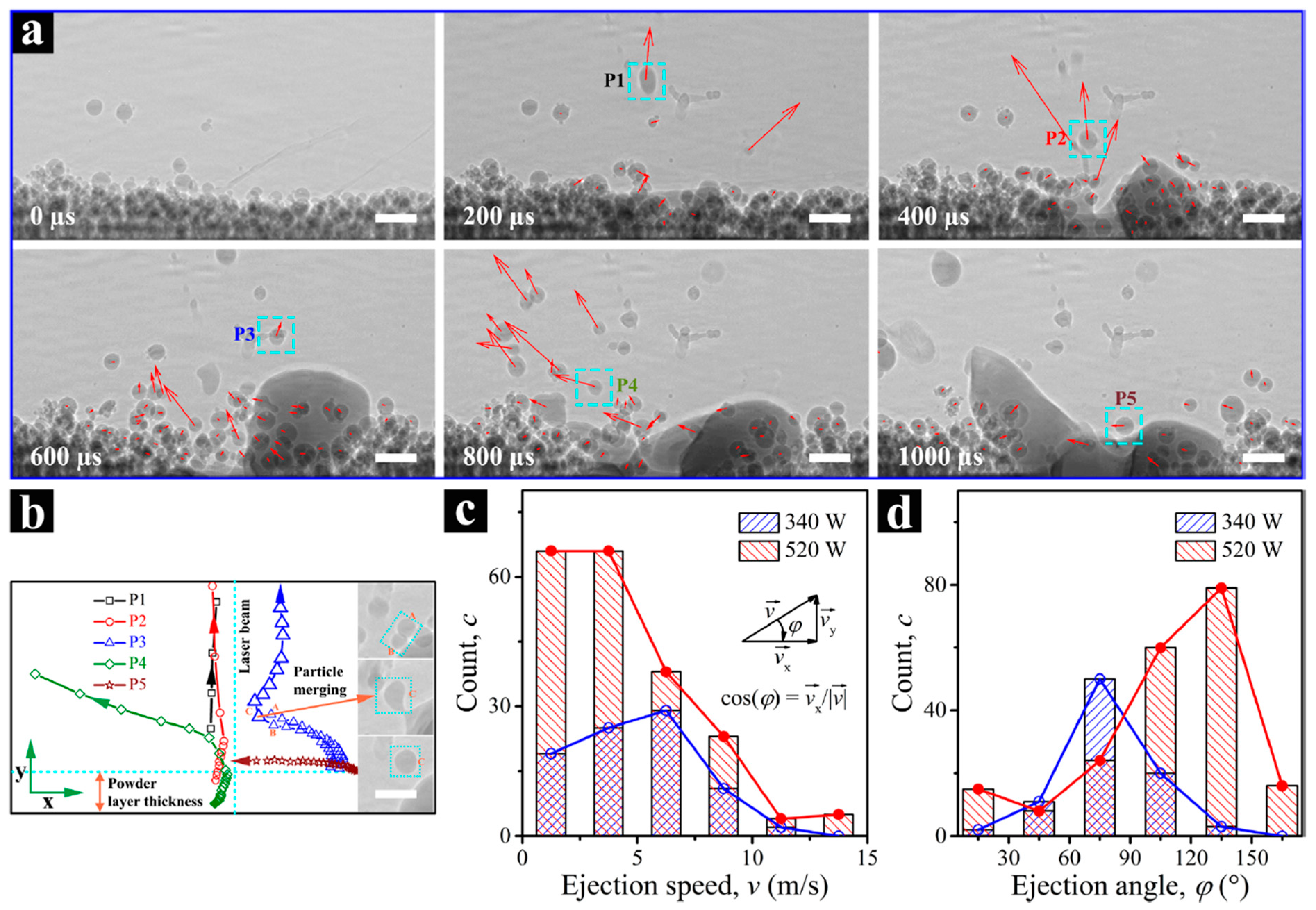
2.2. Powder Motion
3. Combined Use of In Situ Acoustic Measurement Techniques with X-ray Imaging
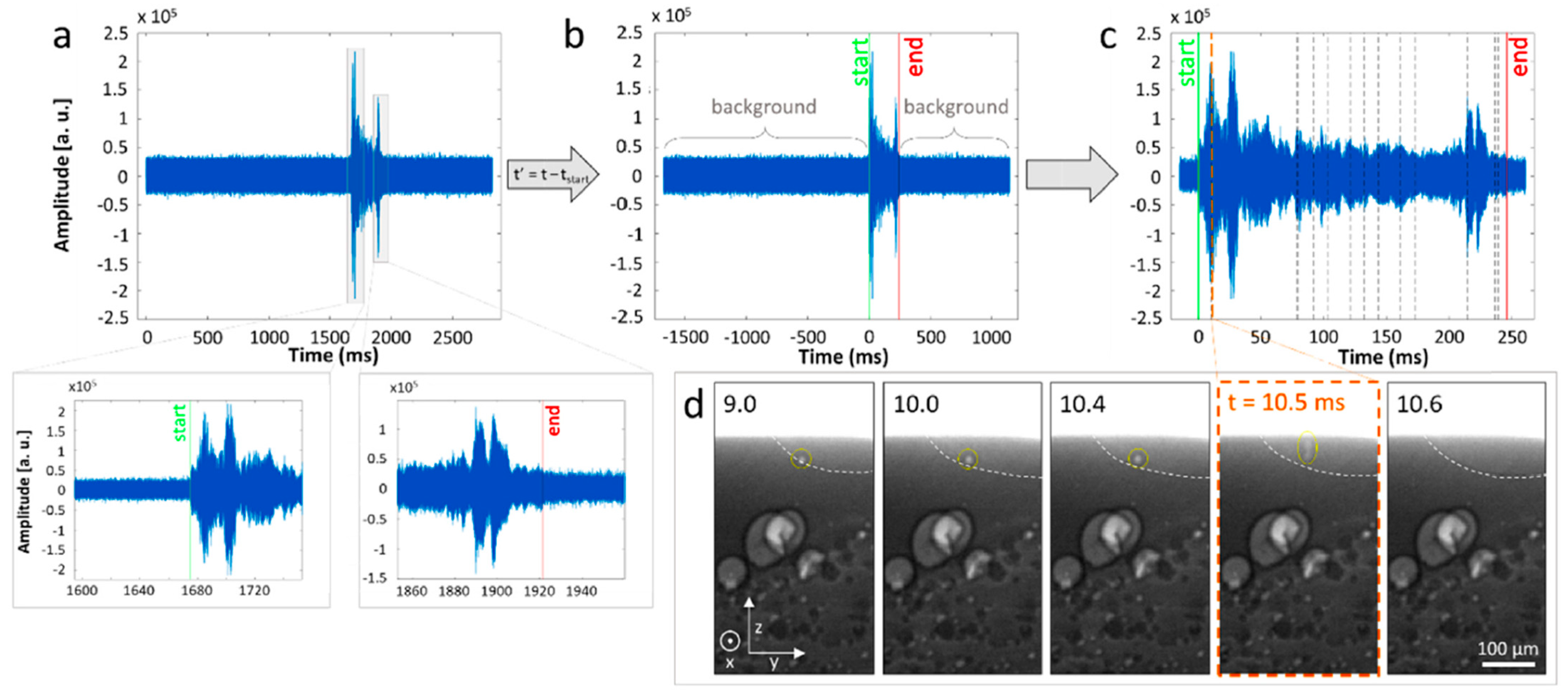
3.1. Non-Contact (ABAE) Type Acoustic Emission Sensor Combined with X-ray Imaging
3.2. Contact (SBAE) Type Acoustic Transmission Sensor Combined with X-ray Imaging
3.3. Multi Sensors (Three Sensors or More) Combined with Acoustic Emission Sensor and X-ray Imaging
4. Conclusions and Future Directions
Funding
Acknowledgments
Conflicts of Interest
References
- Bogue, R. Lasers in Manufacturing: A Review of Technologies and Applications. Assem. Autom. 2015, 35, 161–165. [Google Scholar] [CrossRef]
- Katayama, S. Handbook of Laser Welding Technologies; Elsevier: Amsterdam, The Netherlands, 2013; ISBN 978-0-85709-877-1. [Google Scholar]
- Cao, X.; Jahazi, M.; Immarigeon, J.P.; Wallace, W. A Review of Laser Welding Techniques for Magnesium Alloys. J. Mater. Process. Technol. 2006, 171, 188–204. [Google Scholar] [CrossRef]
- An, N.; Shuai, S.; Hu, T.; Chen, C.; Wang, J.; Ren, Z. Application of Synchrotron X-ray Imaging and Diffraction in Additive Manufacturing: A Review. Acta Metall. Sin. Engl. Lett. 2022, 35, 25–48. [Google Scholar] [CrossRef]
- Wolff, S.J.; Webster, S.; Parab, N.D.; Aronson, B.; Gould, B.; Greco, A.; Sun, T. In-Situ Observations of Directed Energy Deposition Additive Manufacturing Using High-Speed X-ray Imaging. JOM 2021, 73, 189–200. [Google Scholar] [CrossRef]
- Saboori, A.; Aversa, A.; Marchese, G.; Biamino, S.; Lombardi, M.; Fino, P. Application of Directed Energy Deposition-Based Additive Manufacturing in Repair. Appl. Sci. 2019, 9, 3316. [Google Scholar] [CrossRef]
- Kizhakkinan, U.; Seetharaman, S.; Raghavan, N.; Rosen, D.W. Laser Powder Bed Fusion Additive Manufacturing of Maraging Steel: A Review. J. Manuf. Sci. Eng. 2023, 145, 110801. [Google Scholar] [CrossRef]
- Seyda, V.; Kaufmann, N.; Emmelmann, C. Investigation of Aging Processes of Ti-6Al-4 V Powder Material in Laser Melting. Phys. Procedia 2012, 39, 425–431. [Google Scholar] [CrossRef]
- Tao, W.; Leu, M.C. Design of Lattice Structure for Additive Manufacturing. In Proceedings of the 2016 International Symposium on Flexible Automation (ISFA), Cleveland, OH, USA, 1–3 August 2016; pp. 325–332. [Google Scholar]
- Zhao, Y.; Lu, M.; Fan, Z.; Yin, Y.; Lin, W.; Huang, H. Laser Surface Engineering of Ti–6Al–4V with TiO2/Al2O3 Composite Powder for Improved Wear Resistance. Smart Mater. Manuf. 2023, 1, 100015. [Google Scholar] [CrossRef]
- King, W.E.; Barth, H.D.; Castillo, V.M.; Gallegos, G.F.; Gibbs, J.W.; Hahn, D.E.; Kamath, C.; Rubenchik, A.M. Observation of Keyhole-Mode Laser Melting in Laser Powder-Bed Fusion Additive Manufacturing. J. Mater. Process. Technol. 2014, 214, 2915–2925. [Google Scholar] [CrossRef]
- Guo, L.; Liu, H.; Wang, H.; Wei, Q.; Xiao, Y.; Tang, Z.; Wu, Y.; Wang, H. Identifying the Keyhole Stability and Pore Formation Mechanisms in Laser Powder Bed Fusion Additive Manufacturing. J. Mater. Process. Technol. 2023, 321, 118153. [Google Scholar] [CrossRef]
- Guo, L.; Wang, H.; Liu, H.; Huang, Y.; Wei, Q.; Leung, C.L.A.; Wu, Y.; Wang, H. Understanding Keyhole Induced-Porosities in Laser Powder Bed Fusion of Aluminum and Elimination Strategy. Int. J. Mach. Tools Manuf. 2023, 184, 103977. [Google Scholar] [CrossRef]
- Barroqueiro, B.; Andrade-Campos, A.; Valente, R.; Neto, V. Metal Additive Manufacturing Cycle in Aerospace Industry: A Comprehensive Review. J. Manuf. Mater. Process. 2019, 3, 52. [Google Scholar] [CrossRef]
- Li, R.; Liu, J.; Shi, Y.; Wang, L.; Jiang, W. Balling Behavior of Stainless Steel and Nickel Powder during Selective Laser Melting Process. Int. J. Adv. Manuf. Technol. 2012, 59, 1025–1035. [Google Scholar] [CrossRef]
- Tang, P.; Wang, S.; Duan, H.; Long, M.; Li, Y.; Fan, S.; Chen, D. The Formation of Humps and Ripples During Selective Laser Melting of 316l Stainless Steel. JOM 2020, 72, 1128–1137. [Google Scholar] [CrossRef]
- Ikeshoji, T.-T.; Yonehara, M.; Kato, C.; Yanaga, Y.; Takeshita, K.; Kyogoku, H. Spattering Mechanism of Laser Powder Bed Fusion Additive Manufacturing on Heterogeneous Surfaces. Sci. Rep. 2022, 12, 20384. [Google Scholar] [CrossRef] [PubMed]
- Hasan, N.; Habibor Rahman, M.; Wessman, A.; Smith, T.; Shafae, M. Process Defects Knowledge Modeling in Laser Powder Bed Fusion Additive Manufacturing: An Ontological Framework. Manuf. Lett. 2023, 35, 822–833. [Google Scholar] [CrossRef]
- Fu, Y.; Downey, A.; Yuan, L.; Zhang, T.; Pratt, A.; Balogun, Y. Machine Learning Algorithms for Defect Detection in Metal Laser-Based Additive Manufacturing: A Review. J. Manuf. Process. 2022, 75, 693–710. [Google Scholar] [CrossRef]
- Spatter in Laser Welding|Journal of Laser Applications|AIP Publishing. Available online: https://pubs.aip.org/lia/jla/article-abstract/23/3/032005/221044/Spatter-in-laser-welding?redirectedFrom=fulltext (accessed on 8 February 2024).
- Deng, H.; Cheng, Y.; Feng, Y.; Xiang, J. Industrial Laser Welding Defect Detection and Image Defect Recognition Based on Deep Learning Model Developed. Symmetry 2021, 13, 1731. [Google Scholar] [CrossRef]
- Boley, M.; Fetzer, F.; Weber, R.; Graf, T. High-Speed X-ray Imaging System for the Investigation of Laser Welding Processes. J. Laser Appl. 2019, 31, 042004. [Google Scholar] [CrossRef]
- Hocine, S.; Van Swygenhoven, H.; Van Petegem, S.; Chang, C.S.T.; Maimaitiyili, T.; Tinti, G.; Sanchez, D.F.; Grolimund, D.; Casati, N. Operando X-ray Diffraction during Laser 3D Printing. Mater. Today 2020, 34, 30–40. [Google Scholar] [CrossRef]
- Hamidi Nasab, M.; Masinelli, G.; de Formanoir, C.; Schlenger, L.; Van Petegem, S.; Esmaeilzadeh, R.; Wasmer, K.; Ganvir, A.; Salminen, A.; Aymanns, F.; et al. Harmonizing Sound and Light: X-ray Imaging Unveils Acoustic Signatures of Stochastic Inter-Regime Instabilities during Laser Melting. Nat. Commun. 2023, 14, 8008. [Google Scholar] [CrossRef] [PubMed]
- Pandiyan, V.; Masinelli, G.; Claire, N.; Le-Quang, T.; Hamidi-Nasab, M.; de Formanoir, C.; Esmaeilzadeh, R.; Goel, S.; Marone, F.; Logé, R.; et al. Deep Learning-Based Monitoring of Laser Powder Bed Fusion Process on Variable Time-Scales Using Heterogeneous Sensing and Operando X-ray Radiography Guidance. Addit. Manuf. 2022, 58, 103007. [Google Scholar] [CrossRef]
- Leung, C.L.A. X-ray Imaging of Powder Consolidation during Laser Additive Manufacturing. Ph.D. Thesis, The University of Manchester, Manchester, UK, 2017. [Google Scholar]
- Gillespie, J.; Yeoh, W.Y.; Zhao, C.; Parab, N.D.; Sun, T.; Rollett, A.D.; Lan, B.; Kube, C.M. In Situ Characterization of Laser-Generated Melt Pools Using Synchronized Ultrasound and High-Speed X-ray Imaging. J. Acoust. Soc. Am. 2021, 150, 2409–2420. [Google Scholar] [CrossRef] [PubMed]
- Leung, C.L.A.; Marussi, S.; Atwood, R.C.; Towrie, M.; Withers, P.J.; Lee, P.D. In Situ X-ray Imaging of Defect and Molten Pool Dynamics in Laser Additive Manufacturing. Nat. Commun. 2018, 9, 1355. [Google Scholar] [CrossRef] [PubMed]
- Huang, W.; Kovacevic, R. Feasibility Study of Using Acoustic Signals for Online Monitoring of the Depth of Weld in the Laser Welding of High-Strength Steels. Proc. Inst. Mech. Eng. Part B J. Eng. Manuf. 2009, 223, 343–361. [Google Scholar] [CrossRef]
- Yusof, M.F.M.; Ishak, M.; Ghazali, M.F. Feasibility of Using Acoustic Method in Monitoring the Penetration Status during the Pulse Mode Laser Welding Process. IOP Conf. Ser. Mater. Sci. Eng. 2017, 238, 012006. [Google Scholar] [CrossRef]
- Gaja, H.; Liou, F. Defects Monitoring of Laser Metal Deposition Using Acoustic Emission Sensor. Int. J. Adv. Manuf. Technol. 2017, 90, 561–574. [Google Scholar] [CrossRef]
- Ghayoomi Mohammadi, M.; Mahmoud, D.; Elbestawi, M. On the Application of Machine Learning for Defect Detection in L-PBF Additive Manufacturing. Opt. Laser Technol. 2021, 143, 107338. [Google Scholar] [CrossRef]
- Drissi-Daoudi, R.; Pandiyan, V.; Logé, R.; Shevchik, S.; Masinelli, G.; Ghasemi-Tabasi, H.; Parrilli, A.; Wasmer, K. Differentiation of Materials and Laser Powder Bed Fusion Processing Regimes from Airborne Acoustic Emission Combined with Machine Learning. Virtual Phys. Prototyp. 2022, 17, 181–204. [Google Scholar] [CrossRef]
- Hauser, T.; Reisch, R.T.; Kamps, T.; Kaplan, A.F.; Volpp, J. Acoustic Emissions in Directed Energy Deposition Processes. Int. J. Adv. Manuf. Technol. 2022, 119, 3517–3532. [Google Scholar] [CrossRef]
- Wang, H.; Li, B.; Xuan, F.-Z. Acoustic Emission for in Situ Process Monitoring of Selective Laser Melting Additive Manufacturing Based on Machine Learning and Improved Variational Modal Decomposition. Int. J. Adv. Manuf. Technol. 2022, 122, 2277–2292. [Google Scholar] [CrossRef]
- Schmidt, L.; Roemer, F.; Böttger, D.; Leinenbach, F.; Strass, B.; Wolter, B.; Schricker, K.; Seibold, M.; Bergmann, J.; Del Galdo, G. Acoustic Process Monitoring in Laser Beam Welding. Procedia CIRP 2020, 94, 763–768. [Google Scholar] [CrossRef]
- Wasmer, K.; Drissi Daoudi, R.; Masinelli, G.; Le Quang, T.; Logé, R.; Shevchik, S. When AM (Additive Manufacturing) Meets AE (Acoustic Emission) and AI (Artificial Intelligence). In Proceedings of the 35th European and 10th International Conference on AE Testing, Ljubljana, Slovenia, 13–16 September 2022; Volume 28. [Google Scholar] [CrossRef]
- Wasmer, K.; Le-Quang, T.; Meylan, B.; Vakili-Farahani, F.; Olbinado, M.P.; Rack, A.; Shevchik, S.A. Laser Processing Quality Monitoring by Combining Acoustic Emission and Machine Learning: A High-Speed X-ray Imaging Approach. Procedia CIRP 2018, 74, 654–658. [Google Scholar] [CrossRef]
- Shevchik, S.; Le Quang, T.; Meylan, B.; Wasmer, K. Acoustic Emission for in Situ Monitoring of Laser Processing. In Proceedings of the 33rd European Conference Acoustic Emission Test (EWGAE), Senlis, France, 13–16 September 2018. [Google Scholar]
- Shevchik, S.A.; Kenel, C.; Leinenbach, C.; Wasmer, K. Acoustic Emission for in Situ Quality Monitoring in Additive Manufacturing Using Spectral Convolutional Neural Networks. Addit. Manuf. 2018, 21, 598–604. [Google Scholar] [CrossRef]
- Wasmer, K.; Wüst, M.; Cui, D.; Masinelli, G.; Pandiyan, V.; Shevchik, S. Monitoring of Functionally Graded Material during Laser Directed Energy Deposition by Acoustic Emission and Optical Emission Spectroscopy Using Artificial Intelligence. Virtual Phys. Prototyp. 2023, 18, e2189599. [Google Scholar] [CrossRef]
- Kouprianoff, D.; Yadroitsava, I.; du Plessis, A.; Luwes, N.; Yadroitsev, I. Monitoring of Laser Powder Bed Fusion by Acoustic Emission: Investigation of Single Tracks and Layers. Front. Mech. Eng. 2021, 7, 678076. [Google Scholar] [CrossRef]
- Shevchik, S.; Le-Quang, T.; Meylan, B.; Farahani, F.V.; Olbinado, M.P.; Rack, A.; Masinelli, G.; Leinenbach, C.; Wasmer, K. Supervised Deep Learning for Real-Time Quality Monitoring of Laser Welding with X-ray Radiographic Guidance. Sci. Rep. 2020, 10, 3389. [Google Scholar] [CrossRef] [PubMed]
- Martin, A.A.; Calta, N.P.; Hammons, J.A.; Khairallah, S.A.; Nielsen, M.H.; Shuttlesworth, R.M.; Sinclair, N.; Matthews, M.J.; Jeffries, J.R.; Willey, T.M.; et al. Ultrafast Dynamics of Laser-Metal Interactions in Additive Manufacturing Alloys Captured by in Situ X-ray Imaging. Mater. Today Adv. 2019, 1, 100002. [Google Scholar] [CrossRef]
- Wolff, S.J.; Wang, H.; Gould, B.; Parab, N.; Wu, Z.; Zhao, C.; Greco, A.; Sun, T. In Situ X-ray Imaging of Pore Formation Mechanisms and Dynamics in Laser Powder-Blown Directed Energy Deposition Additive Manufacturing. Int. J. Mach. Tools Manuf. 2021, 166, 103743. [Google Scholar] [CrossRef]
- Chen, Y.; Clark, S.J.; Huang, Y.; Sinclair, L.; Lun Alex Leung, C.; Marussi, S.; Connolley, T.; Magdysyuk, O.V.; Atwood, R.C.; Baxter, G.J.; et al. In Situ X-ray Quantification of Melt Pool Behaviour during Directed Energy Deposition Additive Manufacturing of Stainless Steel. Mater. Lett. 2021, 286, 129205. [Google Scholar] [CrossRef]
- Parab, N.D.; Zhao, C.; Cunningham, R.; Escano, L.I.; Gould, B.; Wolff, S.; Guo, Q.; Xiong, L.; Kantzos, C.; Pauza, J. High-Speed Synchrotron X-ray Imaging of Laser Powder Bed Fusion Process. Synchrotron Radiat. News 2019, 32, 4–8. [Google Scholar] [CrossRef]
- Guo, Q.; Zhao, C.; Qu, M.; Xiong, L.; Escano, L.I.; Hojjatzadeh, S.M.H.; Parab, N.D.; Fezzaa, K.; Everhart, W.; Sun, T.; et al. In-Situ Characterization and Quantification of Melt Pool Variation under Constant Input Energy Density in Laser Powder Bed Fusion Additive Manufacturing Process. Addit. Manuf. 2019, 28, 600–609. [Google Scholar] [CrossRef]
- Sun, T. Probing Ultrafast Dynamics in Laser Powder Bed Fusion Using High-Speed X-ray Imaging: A Review of Research at the Advanced Photon Source. JOM 2020, 72, 999–1008. [Google Scholar] [CrossRef]
- Li, X.; Zhao, C.; Sun, T.; Tan, W. Revealing Transient Powder-Gas Interaction in Laser Powder Bed Fusion Process through Multi-Physics Modeling and High-Speed Synchrotron X-ray Imaging. Addit. Manuf. 2020, 35, 101362. [Google Scholar] [CrossRef]
- Li, X.; Guo, Q.; Chen, L.; Tan, W. Quantitative Investigation of Gas Flow, Powder-Gas Interaction, and Powder Behavior under Different Ambient Pressure Levels in Laser Powder Bed Fusion. Int. J. Mach. Tools Manuf. 2021, 170, 103797. [Google Scholar] [CrossRef]
- Xiao, X.; Lu, C.; Fu, Y.; Ye, X.; Song, L.; Xiao, X.; Lu, C.; Fu, Y.; Ye, X.; Song, L. Progress on Experimental Study of Melt Pool Flow Dynamics in Laser Material Processing. In Liquid Metals; IntechOpen: London, UK, 2021; ISBN 978-1-83969-185-0. [Google Scholar]
- Cunningham, R.; Zhao, C.; Parab, N.; Kantzos, C.; Pauza, J.; Fezzaa, K.; Sun, T.; Rollett, A.D. Keyhole Threshold and Morphology in Laser Melting Revealed by Ultrahigh-Speed X-ray Imaging. Science 2019, 363, 849–852. [Google Scholar] [CrossRef] [PubMed]
- Wang, R.; Garcia, D.; Kamath, R.R.; Dou, C.; Ma, X.; Shen, B.; Choo, H.; Fezzaa, K.; Yu, H.Z.; Kong, Z. (James). In Situ Melt Pool Measurements for Laser Powder Bed Fusion Using Multi Sensing and Correlation Analysis. Sci. Rep. 2022, 12, 13716. [Google Scholar] [CrossRef] [PubMed]
- Templeton William, F.; Shawn, H.; Seth, S.; Albert, T.; Sneha Prabha, N. Finding the Limits of Single-Track Deposition Experiments: An Experimental Study of Melt Pool Characterization in Laser Powder Bed Fusion. Mater. Des. 2023, 231, 112069. [Google Scholar] [CrossRef]
- Parab, N.D.; Zhao, C.; Cunningham, R.; Escano, L.I.; Fezzaa, K.; Everhart, W.; Rollett, A.D.; Chen, L.; Sun, T. Ultrafast X-ray Imaging of Laser–Metal Additive Manufacturing Processes. J. Synchrotron Radiat. 2018, 25, 1467–1477. [Google Scholar] [CrossRef]
- Tochigi, Y.; Hanzawa, K.; Kato, Y.; Kuroda, R.; Mutoh, H.; Hirose, R.; Tominaga, H.; Takubo, K.; Kondo, Y.; Sugawa, S. A Global-Shutter CMOS Image Sensor with Readout Speed of 1-Tpixel/s Burst and 780-Mpixel/s Continuous. IEEE J. Solid-State Circuits 2013, 48, 329–338. [Google Scholar] [CrossRef]
- Tsuji, K. (Ed.) The Micro-World Observed by Ultra High-Speed Cameras; Springer International Publishing: Cham, Switzerland, 2018; ISBN 978-3-319-61490-8. [Google Scholar]
- Wang, J.; Zhu, R.; Liu, Y.; Zhang, L. Understanding Melt Pool Characteristics in Laser Powder Bed Fusion: An Overview of Single- and Multi-Track Melt Pools for Process Optimization. Adv. Powder Mater. 2023, 2, 100137. [Google Scholar] [CrossRef]
- Clark, S.J.; Leung, C.L.A.; Chen, Y.; Sinclair, L.; Marussi, S.; Lee, P.D. Capturing Marangoni Flow via Synchrotron Imaging of Selective Laser Melting; IOP Publishing: Bristol, UK, 2020; Volume 861, p. 012010. [Google Scholar]
- Khairallah, S.A.; Anderson, A.T.; Rubenchik, A.; King, W.E. Laser Powder-Bed Fusion Additive Manufacturing: Physics of Complex Melt Flow and Formation Mechanisms of Pores, Spatter and Denudation Zones. Acta Mater. 2016, 108, 36–45. [Google Scholar] [CrossRef]
- Young, Z.A.; Guo, Q.; Parab, N.D.; Zhao, C.; Qu, M.; Escano, L.I.; Fezzaa, K.; Everhart, W.; Sun, T.; Chen, L. Types of Spatter and Their Features and Formation Mechanisms in Laser Powder Bed Fusion Additive Manufacturing Process. Addit. Manuf. 2020, 36, 101438. [Google Scholar] [CrossRef]
- Guo, Q.; Zhao, C.; Escano, L.I.; Young, Z.; Xiong, L.; Fezzaa, K.; Everhart, W.; Brown, B.; Sun, T.; Chen, L. Transient Dynamics of Powder Spattering in Laser Powder Bed Fusion Additive Manufacturing Process Revealed by In-Situ High-Speed High-Energy X-ray Imaging. Acta Mater. 2018, 151, 169–180. [Google Scholar] [CrossRef]
- Wang, D.; Wu, S.; Fu, F.; Mai, S.; Yang, Y.; Liu, Y.; Song, C. Mechanisms and Characteristics of Spatter Generation in SLM Processing and Its Effect on the Properties. Mater. Des. 2017, 117, 121–130. [Google Scholar] [CrossRef]
- Zhao, C.; Fezzaa, K.; Cunningham, R.W.; Wen, H.; De Carlo, F.; Chen, L.; Rollett, A.D.; Sun, T. Real-Time Monitoring of Laser Powder Bed Fusion Process Using High-Speed X-ray Imaging and Diffraction. Sci. Rep. 2017, 7, 3602. [Google Scholar] [CrossRef] [PubMed]
- Drissi-Daoudi, R.; Masinelli, G.; de Formanoir, C.; Wasmer, K.; Jhabvala, J.; Logé, R.E. Acoustic Emission for the Prediction of Processing Regimes in Laser Powder Bed Fusion, and the Generation of Processing Maps. Addit. Manuf. 2023, 67, 103484. [Google Scholar] [CrossRef]
- Hossain, M.S.; Taheri, H. In Situ Process Monitoring for Additive Manufacturing through Acoustic Techniques. J. Mater. Eng. Perform. 2020, 29, 6249–6262. [Google Scholar] [CrossRef]
- Fisher, K.A.; Candy, J.V.; Guss, G.; Mathews, M.J. Evaluating Acoustic Emission Signals as an In Situ Process Monitoring Technique for Selective Laser Melting (SLM); Lawrence Livermore National Lab. (LLNL): Livermore, CA, USA, 2016. [Google Scholar]
- Jiang, M.; Liang, Y.; Feng, X.; Fan, X.; Pei, Z.; Xue, Y.; Guan, R. Text Classification Based on Deep Belief Network and Softmax Regression. Neural Comput. Appl. 2018, 29, 61–70. [Google Scholar] [CrossRef]
- Tempelman, J.R.; Wachtor, A.J.; Flynn, E.B.; Depond, P.J.; Forien, J.-B.; Guss, G.M.; Calta, N.P.; Matthews, M.J. Detection of Keyhole Pore Formations in Laser Powder-Bed Fusion Using Acoustic Process Monitoring Measurements. Addit. Manuf. 2022, 55, 102735. [Google Scholar] [CrossRef]
- Eschner, N.; Weiser, L.; Häfner, B.; Lanza, G. Classification of Specimen Density in Laser Powder Bed Fusion (L-PBF) Using in-Process Structure-Borne Acoustic Process Emissions. Addit. Manuf. 2020, 34, 101324. [Google Scholar] [CrossRef]
- Deutsch, V.; Platte, M.; Vogt, M. Ultraschallprüfung: Grundlagen und Industrielle Anwendungen; Springer: Berlin/Heidelberg, Germany, 2013; ISBN 978-3-642-59138-9. [Google Scholar]
- Huang, W.; Kovacevic, R. Acoustic Monitoring of Weld Penetration during Laser Welding of High Strength Steels; AIP Publishing: Melville, NY, USA, 2009; pp. 630–637. [Google Scholar]
- Kim, Y.; Choi, S.; Jhang, K.-Y.; Kim, T. Experimental Verification of Contact Acoustic Nonlinearity at Rough Contact Interfaces. Materials 2021, 14, 2988. [Google Scholar] [CrossRef]
- Jin, J.; Johnson, P.; Shokouhi, P. An Integrated Analytical and Experimental Study of Contact Acoustic Nonlinearity at Rough Interfaces of Fatigue Cracks. J. Mech. Phys. Solids 2020, 135, 103769. [Google Scholar] [CrossRef]
- Sun, X.; Ding, X.; Li, F.; Zhou, S.; Liu, Y.; Hu, N.; Su, Z.; Zhao, Y.; Zhang, J.; Deng, M. Interaction of Lamb Wave Modes with Weak Material Nonlinearity: Generation of Symmetric Zero-Frequency Mode. Sensors 2018, 18, 2451. [Google Scholar] [CrossRef] [PubMed]
- Novak, A.; Bentahar, M.; Tournat, V.; El Guerjouma, R.; Simon, L. Nonlinear Acoustic Characterization of Micro-Damaged Materials through Higher Harmonic Resonance Analysis. NDT E Int. 2012, 45, 1–8. [Google Scholar] [CrossRef]
- Zhang, J.; Ma, H.; Yan, W.; Li, Z. Defect Detection and Location in Switch Rails by Acoustic Emission and Lamb Wave Analysis: A Feasibility Study. Appl. Acoust. 2016, 105, 67–74. [Google Scholar] [CrossRef]
- Vo, N.T.; Atwood, R.C.; Drakopoulos, M. Superior Techniques for Eliminating Ring Artifacts in X-ray Micro-Tomography. Opt. Express 2018, 26, 28396–28412. [Google Scholar] [CrossRef] [PubMed]
- de Formanoir, C.; Hamidi Nasab, M.; Schlenger, L.; Van Petegem, S.; Masinelli, G.; Marone Welford, F.; Salminen, A.; Ganvir, A.; Wasmer, K.; Logé, R. Healing of Keyhole Porosity by Means of Defocused Laser Beam Remelting Operando Observation by X-ray Imaging and Acoustic Emission-Based Detection. Addit. Manuf. 2023, 79, 103880. [Google Scholar] [CrossRef]
- Fischer, B.; Rohringer, W.; Panzer, N.; Hecker, S. Acoustic Process Control for Laser Material Processing. Laser Technol. J. 2017, 14, 21–25. [Google Scholar] [CrossRef]
- Chen, L.; Yao, X.; Feng, W.; Chew, Y.; Moon, S.K. Multimodal Sensor Fusion for Real-Time Location-Dependent Defect Detection in Laser-Directed Energy Deposition. In Proceedings of the International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, Boston, MA, USA, 20–23 August 2023. [Google Scholar]
- Plotnikov, Y.; Henkel, D.; Burdick, J.; French, A.; Sions, J.; Bourne, K. Infrared-Assisted Acoustic Emission Process Monitoring for Additive Manufacturing; AIP Publishing: Vermont, VT, USA, 2019; Volume 2102. [Google Scholar]
- Tempelman, J.R.; Wachtor, A.J.; Flynn, E.B.; Depond, P.J.; Forien, J.-B.; Guss, G.M.; Calta, N.P.; Matthews, M.J. Sensor Fusion of Pyrometry and Acoustic Measurements for Localized Keyhole Pore Identification in Laser Powder Bed Fusion. J. Mater. Process. Technol. 2022, 308, 117656. [Google Scholar] [CrossRef]
- Kube, C.; Shu, Y.; Lew, A.; Galles, D. Real-Time Characterization of Laser-Generated Melt Pools Using Ultrasound. Mater. Eval. 2018, 76, 525–534. [Google Scholar]
- Garavaglia, M.; Demir, A.G.; Zarini, S.; Victor, B.M.; Previtali, B. Process Development and Coaxial Sensing in Fiber Laser Welding of 5754 Al-Alloy. J. Laser Appl. 2019, 31, 022419. [Google Scholar] [CrossRef]
- Martin, A.A.; Wang, J.; DePond, P.J.; Strantza, M.; Forien, J.-B.; Gorgannejad, S.; Guss, G.M.; Thampy, V.; Fong, A.Y.; Weker, J.N.; et al. A Laser Powder Bed Fusion System for Operando Synchrotron X-ray Imaging and Correlative Diagnostic Experiments at the Stanford Synchrotron Radiation Lightsource. Rev. Sci. Instrum. 2022, 93, 043702. [Google Scholar] [CrossRef]
- Available online: https://www.physicalacoustics.com/content/literature/sensors/Model_PICO_HF-1.2.pdf (accessed on 9 January 2024).







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
 |  |  |  |  | |||
|---|---|---|---|---|---|---|---|
| Research Works | K. Wasmer et al., 2018 [38] | C. Kube, et al., 2018 [85] | S. Shevchik et al., 2020 [43] | Gillespie, J. et al., 2021 [27] | A.A. Martin et al., 2022 [87] | De Formanoir et al., 2023 [80] | |
| Applied Facilities | |||||||
| X-ray source setup characteristics | Synchrotron facility | Beamline ID19 of the ESRF | European Synchrotron (ESRF) | European Synchrotron (ESRF) | European Synchrotron (ESRF) | Stanford Synchrotron Radiation Light Source (SSRL) | (TOMCAT) beamline of the Swiss Light Source (SLS) |
| Laser and X-ray acquisition synchronization | - | Laser control triggered | Laser control triggered | Laser control triggered | - | TTL triggered, provided by laser control card | |
| X-ray spectrum | Pink beam mean energy was 26.3 keV | Pink beam with average power around 26 keV | Pink beam with average power around 26 keV | Pink beam with average power around 26 keV | 7.4 keV | Filtered within 10 to 55 keV and peak around 20 keV | |
| X-ray detector characteristics | Scintillator | 250 µm-thick Ce-doped Lu3Al5O12 | - | 250 µm-thick Ce-doped LuAG (Lu3Al5O12) | European Synchrotron (ESRF) | 100 µm-thick YAG:Ce (Crytur) | 150 µm-thick LuAg:Ce |
| Pixel | - | 896 × 776 pixels | - | 896 × 776 pixels | 1024 × 672 pixels | 2016 × 2016 CMOS Imaging | |
| Pixel size | 11 µm | 1.923 µm | 11 µm | 1.923 µm | 2 µm | 11 µm | |
| Frame rate | 28,000 to 36,000 fps | 28.503 kHz | 28,762 fps | 28.503 kHz | 20 kHz | 10 kHz | |
| Exposure time | - | - | 30 µm | - | 45 µm | 95 µm | |
| Laser characteristics | Type | Single-mode fiber laser source star fiber 150 P (fiber laser star fiber 150 P/300 P) | fiber laser | Single-mode fiber laser source star fiber 150 P (Coherent Inc., Belp, Switzerland) | Fiber laser | Single-mode CW Yb-fiber laser (IPG Photonics, YLR-500-AC-Y14) | Pulsed mode |
| Wavelength | 1070 nm | 1070 nm | 1070 nm | 1070 nm | 1070 nm | 1070 nm | |
| Spot diameter | 30 µm | 120 µm | 30 µm | 120 µm | 73–135 µm | 13.75 µm | |
| Maximum Power | - | 477 W | 1.5 kW | 477 W | 500 W | 500 W | |
| Acoustic sensor characteristics | Type | Piezo acoustic sensor PICO | Ultrasound transducer | Piezo sensor PICO HF-1.2 (Physical Acoustics, MISTRAS Group, Germany) | Piezo ultrasonic transducers | PCB Piezotronics | Membrane-free optical microphone (Eta250 Ultra, XARION Laser Products) |
| Frequency range | 500–1850 kHz [88] | Resonance frequency: 25 MHz | Sample rate of oscilloscope: 50–2000 kHz | Center frequency of 25 MHz | 4 to 100,000 Hz (+2/−3 dB) | 10 Hz to 1 MHz | |
| Place | Contact to holder | Contact | Contact | Contact | Non-contact | Non-contact | |
| Sampling rate | 10 MHz | 500 MHz | 10 MHz | - | 470 kHz | 2 MHz | |
| Detected phenomena | Conduction welding, stable keyhole, unstable keyhole, and spatter | Melt pool characterization | Process instabilities: conduction welding, stable keyhole, unstable keyhole, blowout, and pores | Melt pool characterization | Fluctuations in the melt pool, pore formation, defect formation | Pore removal, remelting, defect healing | |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Samimi, M.; Saadabadi, M.; Hosseinlaghab, H. Combined Use of Acoustic Measurement Techniques with X-ray Imaging for Real-Time Observation of Laser-Based Manufacturing. Metrology 2024, 4, 181-204. https://doi.org/10.3390/metrology4020012
Samimi M, Saadabadi M, Hosseinlaghab H. Combined Use of Acoustic Measurement Techniques with X-ray Imaging for Real-Time Observation of Laser-Based Manufacturing. Metrology. 2024; 4(2):181-204. https://doi.org/10.3390/metrology4020012
Chicago/Turabian StyleSamimi, Mahdieh, Mehran Saadabadi, and Hassan Hosseinlaghab. 2024. "Combined Use of Acoustic Measurement Techniques with X-ray Imaging for Real-Time Observation of Laser-Based Manufacturing" Metrology 4, no. 2: 181-204. https://doi.org/10.3390/metrology4020012
APA StyleSamimi, M., Saadabadi, M., & Hosseinlaghab, H. (2024). Combined Use of Acoustic Measurement Techniques with X-ray Imaging for Real-Time Observation of Laser-Based Manufacturing. Metrology, 4(2), 181-204. https://doi.org/10.3390/metrology4020012