Abstract
We examine the modified Hill three-body problem by incorporating the oblateness of the primary body and focus on its asymptotic orbits. Specifically, we analyze and characterize homoclinic and heteroclinic connections associated with the collinear equilibrium points. By systematically varying the oblateness parameter, we determine conditions for the existence and location of these orbits. Our results confirm the presence of both homoclinic orbits, where trajectories asymptotically connect an equilibrium point to itself, and heteroclinic orbits, which establish connections between two distinct equilibrium points, via their stable and unstable invariant manifolds, which are computed both analytically and numerically. To achieve precise computations, we employ differential correction techniques and leverage the system’s inherent symmetries. Numerical calculations are carried out for orbit multiplicities up to twelve, ensuring a comprehensive exploration of the dynamical properties.
1. Introduction
The restricted three-body problem is a fundamental model in celestial mechanics, providing a theoretical framework for understanding orbital dynamics in various astrophysical and planetary contexts [1]. A key aspect of this problem is the study of periodic orbits which serve as the backbone of dynamical analysis, governing nearby trajectories and contributing to the long-term stability of planetary and satellite systems (see, e.g., [2,3,4]). To improve the model’s applicability to realistic celestial environments, several modifications have been introduced, including the effects of oblateness, radiation pressure, or considering more than two primaries (see, [5,6,7], among others). Thus, to better capture the dynamics of binary systems and improve the analysis of libration points and periodic orbits, Zhang et al. [8] introduced a modified model in which the secondary is modeled as a triaxial ellipsoid. This approach accounts for the irregular shape of the secondary, leading to a more accurate representation of the gravitational field and providing deeper insights into the dynamical structures near binary systems. Furthermore, Wang and Xu [9] extended this approach by employing a polyhedron shape model within the restricted full three-body problem, offering an even higher-fidelity approximation of the system’s gravitational environment.
A notable variant of the restricted three-body problem is Hill’s problem, which was originally introduced by G. W. Hill to study the motion of the Moon under the gravitational influence of the Earth and the Sun [10]. This problem plays a fundamental role in celestial mechanics, providing valuable insights into satellite dynamics. Its formulation arises as a limiting case of the restricted three-body problem in which one of the two primary bodies is vastly more massive than the other. As proposed by Hill, a common example for the application of this problem is the Sun–Earth system where the gravitational influence of the Sun dominates while the Earth acts as a secondary, much smaller primary. In this approximation, the problem is examined in a rotating coordinate system centered on the smaller primary. The positive -axis extends toward the larger primary which is assumed to be at an infinite distance from the secondary. This simplification of the restricted three-body problem significantly reduces the complexity of the equations describing the motion of the third body of infinitesimal mass while preserving the essential dynamical characteristics of the system.
The study of equilibrium dynamics and periodic solutions of Hill’s problem has remained an important topic in celestial mechanics. Over the years, numerous studies have been devoted to understanding the behavior of periodic orbits, their stability properties, and bifurcations. Hénon [11] was among the pioneers in this field, investigating planar simple symmetric periodic orbits. He provided a comprehensive mapping of family characteristics in the plane of initial conditions and analyzed their horizontal and vertical stability [12]. These foundational works laid the groundwork for subsequent studies in higher-dimensional settings. Thus, Zagouras and Markellos [13] extended these investigations by numerically exploring three-dimensional periodic orbits around equilibrium points. Later, Batkhin and Batkhina [14] analyzed families of three-dimensional periodic orbits emerging from vertical critical periodic orbits. Their study provided a systematic classification of the interaction between families of periodic orbits exhibiting different symmetries, which offered a deeper insight into their global structure. Further advancements were made by Kalantonis [15], who conducted an extensive exploration of three-dimensional periodic orbits bifurcating from the vertical self-resonant periodic orbits of all basic planar families. This study highlighted the role of resonance phenomena in shaping the evolution of periodic families in dynamical systems. More recently, Aydin [16] investigated the intricate relationship between the Conley–Zehnder index and bifurcation points of planar and spatial periodic orbits. By constructing appropriate bifurcation graphs, this study illuminated the interconnectivity between different families of periodic orbits, revealing new insights into the underlying topological structures governing their evolution. Also, a numerical study on the spatial doubly symmetric periodic orbits can be found in [17].
Based on classical formulations, several modifications to Hill’s problem have introduced additional forces enriching our understanding of its dynamical properties. Therefore, Markellos et al. [18] investigated the photogravitational version of this model, analyzing the influence of radiation pressure on the Hill stability of orbits. In a related study, Kanavos et al. [19] explored the global structure of solutions, identifying periodic, escape, and collision orbits in the space of initial conditions, with solutions exhibiting a multiplicity of up to sixteen. Additionally, Tsirogiannis et al. [20] examined the emergence of irregular families of periodic orbits, contributing to the understanding of their birth while a study about the motion of the infinitesimal third body in the vicinity of the out-of-plane equilibrium points can be found in [21]. A variant of the Hill problem with oblate primaries was introduced by Markellos et al. [22] where basic dynamical characteristics were examined. Further numerical explorations were performed by Kalantonis et al. [23], who assessed the effectiveness of Newton’s method in computing periodic orbits on the Poincaré surface of sections. Perdiou et al. [24] conducted extensive work through a comprehensive numerical investigation of simple periodic orbits, while Perdiou [25] analyzed the evolution of families of periodic orbits with higher-order multiplicities. In the spatial Hill problem with oblateness, de Bustos et al. [26] employed a first-order averaging theory to establish sufficient conditions for the existence of periodic solutions, enhancing the analytical framework for three-dimensional orbital dynamics. More recently, Moneer et al. [27] conducted an extensive classification of initial conditions based on the final states of orbits, elucidating the effect of oblateness on the motion of a massless body near the secondary. Bouaziz and Ansari [28] analyzed the Lagrangian points within the framework of Hill’s problem, introducing a scenario where the third body had a variable mass. Further modifications to the classical Hill problem have been introduced such as its quantized version, where the equilibrium configurations, permissible regions to motion, and periodic solutions have been studied [29,30,31,32]. Also, recent advancement in three-dimensional formulations was made by Abouelmagd [33], who derived the equations of motion by incorporating perturbations from continuation fractional potentials. Additional dynamical properties, such as equilibrium points, zero-velocity curves, and periodic orbits, were analyzed in [34,35], further enriching the theoretical understanding of this extended model.
In this study, we explore asymptotic orbits associated with the collinear equilibrium points in Hill’s problem, considering the influence of an oblate primary. Asymptotic orbits at equilibrium points can be regarded as the limiting case of those approaching asymptotically periodic trajectories and may provide valuable insights into the complex dynamical interactions near equilibrium points. Additionally, they offer a natural mechanism for temporarily or permanently confining a massless body in the vicinity of an equilibrium point, contributing to the study of orbital capture and stability in celestial mechanics. In the framework of the restricted three-body problem, the first numerical study on symmetric doubly asymptotic orbits associated with the collinear equilibrium points was conducted by Deprit and Henrard [36], who demonstrated that these orbits were isolated. Building upon these findings, Perdios and Markellos [37] extended their study by systematically searching for such orbits. Furthermore, in the context of the photogravitational restricted three-body problem, Perdios [38] and Perdios et al. [39] investigated non-symmetric and symmetric asymptotic orbits, respectively, under the assumption that only the larger primary emitted radiation. Their results indicated that symmetric homoclinic orbits formed continuous monoparametric families whereas non-symmetric homoclinic orbits remained isolated in the parameter space. Also, a thorough study on asymptotic orbits at collinear equilibrium points in the restricted three-body problem with oblateness was presented in [40], where the authors determined both symmetric and non-symmetric homoclinic orbits. Additionally, heteroclinic connections were identified in the special case where both primaries exhibit identical oblateness. Further advancements in this field were made by Perdios and Ragos [41], who examined non-symmetric homoclinic orbits within the framework of Chermnykh’s problem. Their findings reaffirmed the isolated nature of these trajectories, emphasizing the role of the system’s parameters in determining such kind of orbits.
The structure of this paper is as follows. In Section 2, we recall the equations of motion governing the studied model. Section 3 explores the equilibrium points and zero velocity curves, which provide essential insights for the nearby trajectories and admissible motion regions. In Section 4, we derive analytical expansions up to fourth-order terms, capturing the local dynamics around equilibrium points and offering approximations for asymptotic trajectories. Section 5 presents our numerical results, focusing on the identification and characterization of homoclinic and heteroclinic orbits. Specifically, we compute homoclinic orbits, which asymptotically depart from and return to the same equilibrium point, as well as heteroclinic orbits, which connect different equilibrium points. Finally, in Section 6, we summarize our findings and suggest potential directions for future research.
2. Equations of Motion
In a barycentric, rotating, and dimensionless coordinate system , where the axis contains two primary bodies with masses , and the more massive primary is modeled as an oblate spheroid, the equations of motion governing a third body of negligible mass, moving under the gravitational influence of the two primaries, are expressed by the system (see, e.g., [42,43,44,45]):
where the potential function is given by:
and the distances of the third body from the primary and secondary bodies are:
respectively. n stands for the mean motion and is defined by the relation:
while is the oblateness coefficient of the larger primary, which is described by:
with being the equatorial radius and the polar radius of the oblate primary, and R represents the distance between the primaries. System (1) admits the Jacobi integral:
where is the Jacobi constant.
The relevant Hill three-body problem with oblateness is formulated as a limiting case of the above problem, following the same methodology used to derive the classical Hill problem from the circular restricted three-body problem [46]. This formulation is achieved by translating the origin to the secondary and applying a scaling transformation of coordinates, , , followed by a limiting process where the mass ratio approaches zero. As a result, the oblateness of the primary is retained in the equations of motion, extending the classical Hill problem to account for this perturbation (see [22] for details). The governing equations of motion for this system are:
where the new potential function takes the form:
and
while is given by (5) and is constrained within a range . The Jacobi integral is now given by:
where C is the new Jacobi constant.
3. Equilibrium Points and Zero-Velocity Curves
The problem possesses two collinear equilibrium points, on the negative axis and on the positive one, with their positions solely dependent on the oblateness coefficient . The exact locations of these points are determined by setting all velocity and acceleration components to zero in the equations of motion (7) and imposing . This yields the equilibrium positions [22]:
From the equilibrium positions and the Jacobi integral (10), the value of the Jacobi constant at these points is obtained by:
By setting the velocity components to zero in the Jacobi integral, we obtain the boundaries that separate the regions where the motion of the infinitesimal mass is permitted from those where it is forbidden. The level curves of the function:
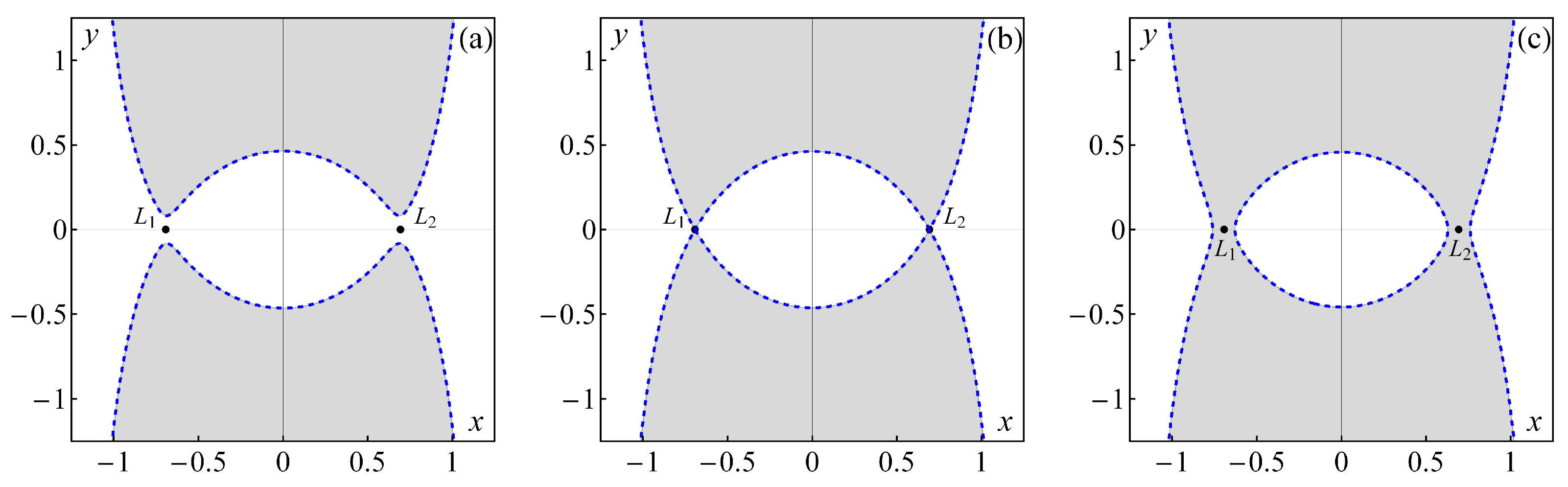
define the zero-velocity curves, which delineate these admissible regions of motion (Figure 1). Similar to the classical Hill problem, these curves are symmetric with respect to both coordinate axes. Figure 1 illustrates the zero-velocity curves (blue dashed curves) for three different values of the Jacobi constant, where the gray color denotes the regions where motion is nonadmissible. For , as shown in Figure 1a, the regions are open, allowing the third body to move freely around both equilibrium points. At , depicted in Figure 1b, the regions are close, restricting motion. Finally, for , as it can be observed from Figure 1c, the boundaries form an enclosed region around the secondary body, preventing the test particle from reaching either the negative equilibrium point or the positive one.
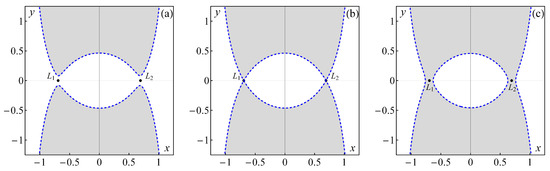
Figure 1.
Zero-velocity curves (blue dashed) in the Hill problem with oblateness for three distinct values of the Jacobi constant: (a) , (b) , (c) . Regions where motion is not allowed are shown light gray.
To analyze the stability of the collinear equilibrium points, we shift the coordinate system origin to these points by setting , and the equations of motion (7) become:
where
Expanding these equations into first-order terms, we obtain the system:
with and:
where we set the following for brevity:
with while the superscript denotes the calculation at the equilibrium. The eigenvalues of matrix are determined by the characteristic equation
which yields two real, and two purely imaginary, eigenvalues:
Due to the presence of the real eigenvalues, the collinear equilibrium points are linearly unstable and consequently nonlinearly unstable [47].
4. Analytical Solution of Asymptotic Motion at the Equilibrium Points
Expanding the right-hand sides of Equations (14) in Taylor series and keeping terms up to the fourth order in and , we obtain the following system:
where the involved coefficients depend only on the oblateness parameter and are given by the following expressions:
and
We express the solution of System (21) in terms of an orbital parameter :
and by substituting these relations into System (21), we obtain:
and
respectively. By equating the coefficients of terms of the same order with respect to the orbital parameter , we obtain the following four systems:
which have to be solved successively, while the involved coefficients , , and , , are given by relations (22) and (23). To determine an asymptotic orbit, we consider the solutions of Systems (27)–(30) along the eigenvector associated with the positive real eigenvalue of matrix M given by (17). These particular solutions are of the form:
where the involved coefficients are determined as follows:
where we set the following for abbreviation:
5. Numerical Results for Asymptotic Orbits at the Equilibrium Points
By setting in the derived solution (31), we can obtain the desired initial conditions of an asymptotic orbit for sufficiently small values of the orbital parameter . Since these conditions depend only on the oblateness parameter , we may apply a correction process to this parameter, so as to accurately compute asymptotic orbits at the collinear equilibrium points. Note that due to the symmetry of the problem with respect to both axes, we are able to identify symmetric homoclinic as well as heteroclinic orbits.
5.1. Homoclinic Orbits
To compute a homoclinic orbit for the considered problem, we may apply a differential corrections process. Thus, an asymptotic orbit is homoclinic symmetric with respect to the axis, if it satisfies the following condition when crossing the axis:
This condition yields isolated roots, so homoclinic orbits for the Hill problem with oblateness are isolated. If Condition (32) is not satisfied, we seek corrections such that:
Expanding the above equation in a Taylor series around and retaining only the first-order terms, we obtain the required corrections:
or
where the partial derivative , which is involved in this equation, can be computed through additional integrations. Utilizing the analysis from the previous section for sufficiently small values of the orbital parameter, we can numerically compute symmetric homoclinic orbits using the proposed corrector scheme.
To determine suitable initial values of for the corrector, a preliminary search is conducted along the -axis. This axis is partitioned into small subintervals and for each , the equations of motion are integrated using initial conditions derived from solution (31) for or , e.g., . The integration proceeds until the Nth perpendicular crossing of the trajectory with the -axis, where the sign of is examined at the endpoints of each subinterval, with representing the time at the Nth intersection of the orbit with the -axis. Detecting a change in sign allows us to identify intervals where homoclinic orbits exist and, consequently, to determine appropriate initial conditions for the oblateness coefficient .
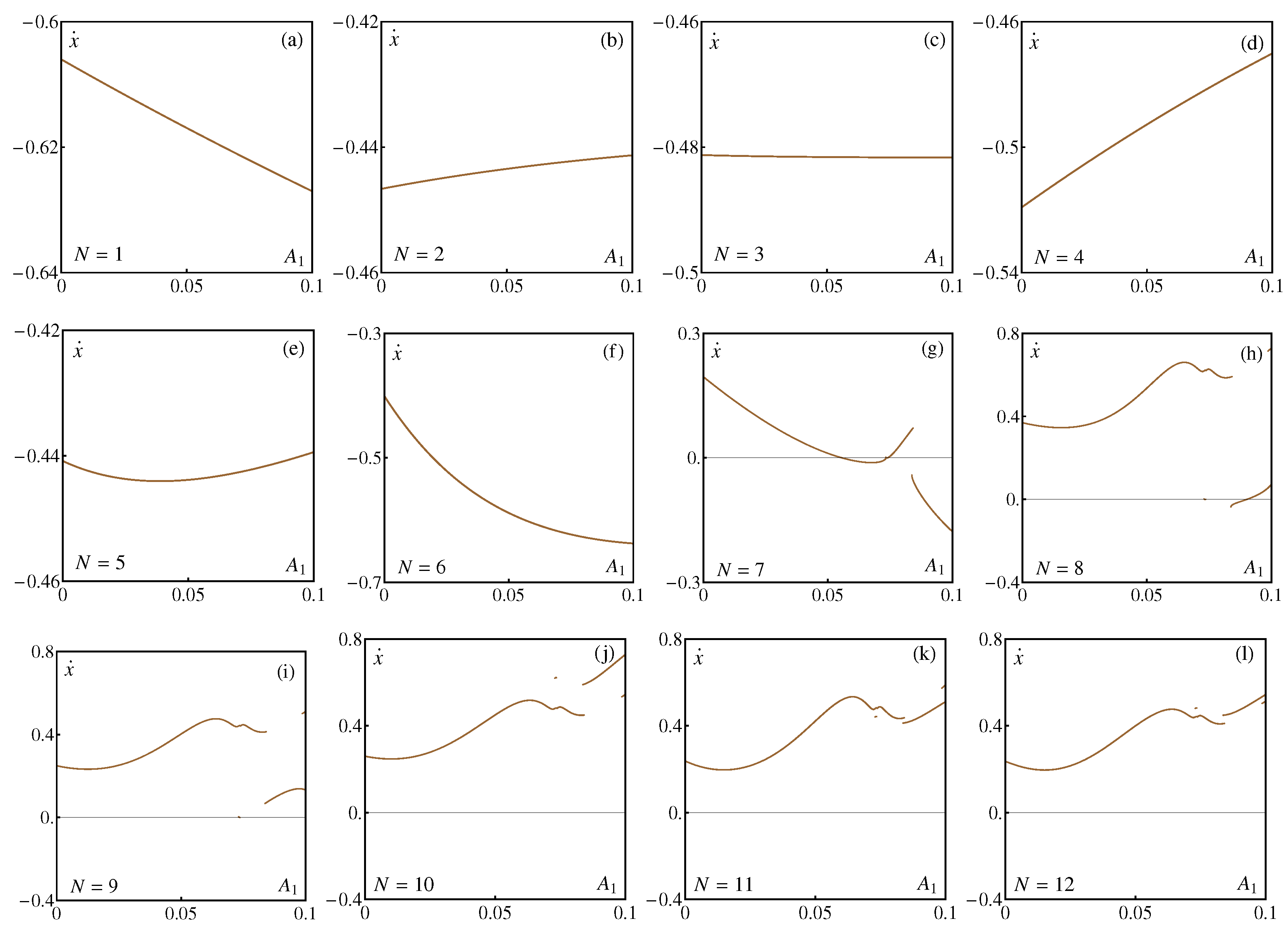
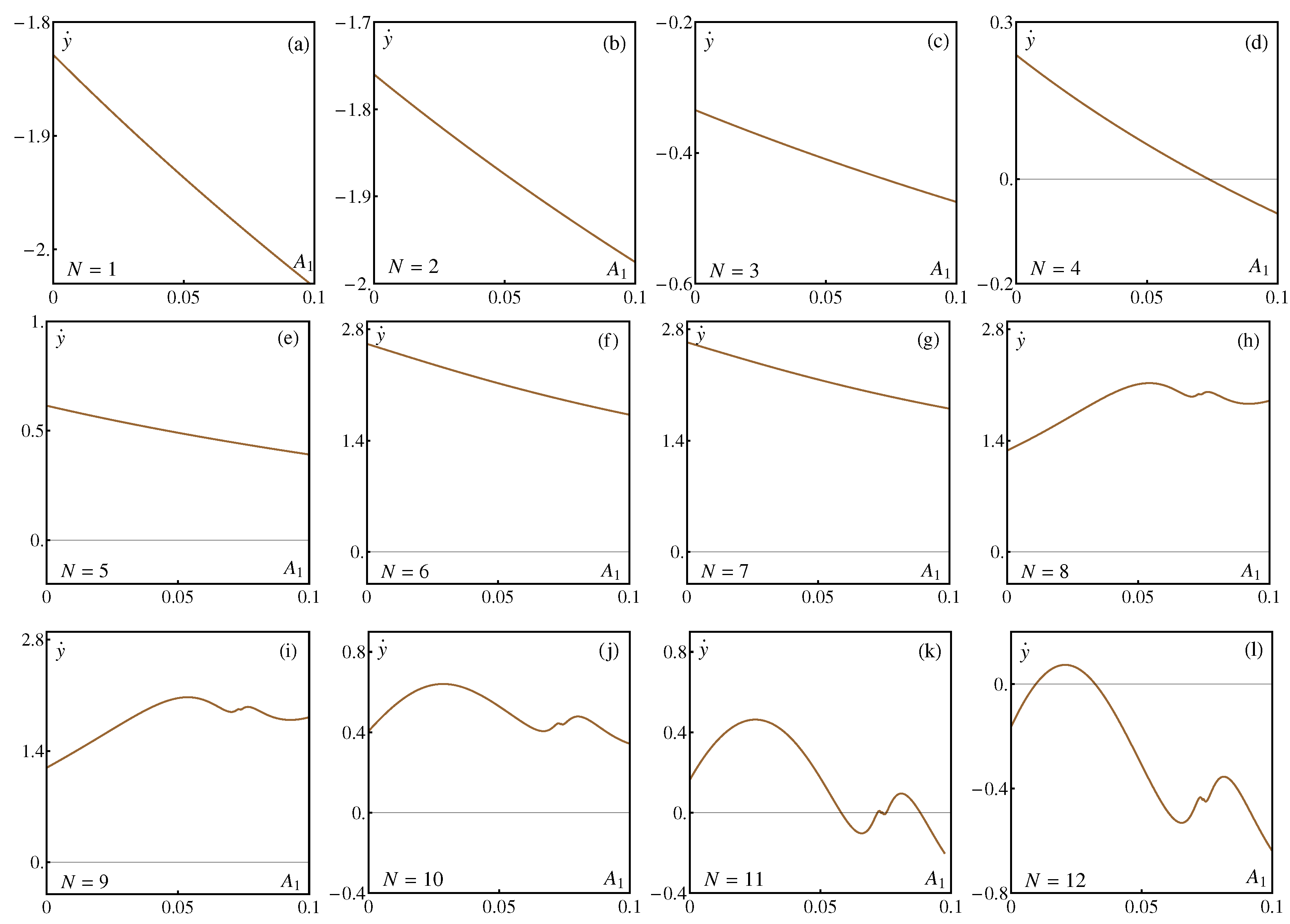
In Figure 2, we plotted function for the multiplicities and . In these frames, we observe that for the multiplicities , this function has a smooth curve while for higher multiplicities, the corresponding curves exhibit discontinuities. It is also clear that in the interval of the oblateness coefficient , homoclinic orbits exist for . Additionally, we see that as the multiplicity of the orbit increases, the number of extrema and roots of the function also increases, meaning that the number of homoclinic orbits grows as well (our results, not presented here, show that the number of these orbits increases substantially for ).
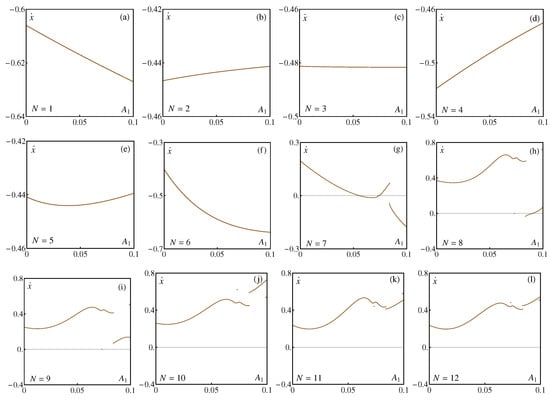
Figure 2.
The behavior of the function for intersections with the -axis.
Figure 2 provide the necessary initial conditions for applying the differential correction procedure described earlier. Thus, by selecting an appropriate approximate value of and a sufficiently small orbital parameter, such as , the initial conditions derived from (31) allow the application of the corrector scheme for the accurate computation of homoclinic orbits emerging from the positive collinear equilibrium point . Due to the symmetry of the problem with respect to the -axis, analogous homoclinic orbits can also be computed from the negative equilibrium point for (e.g., ), yielding symmetric trajectories relative to this axis.
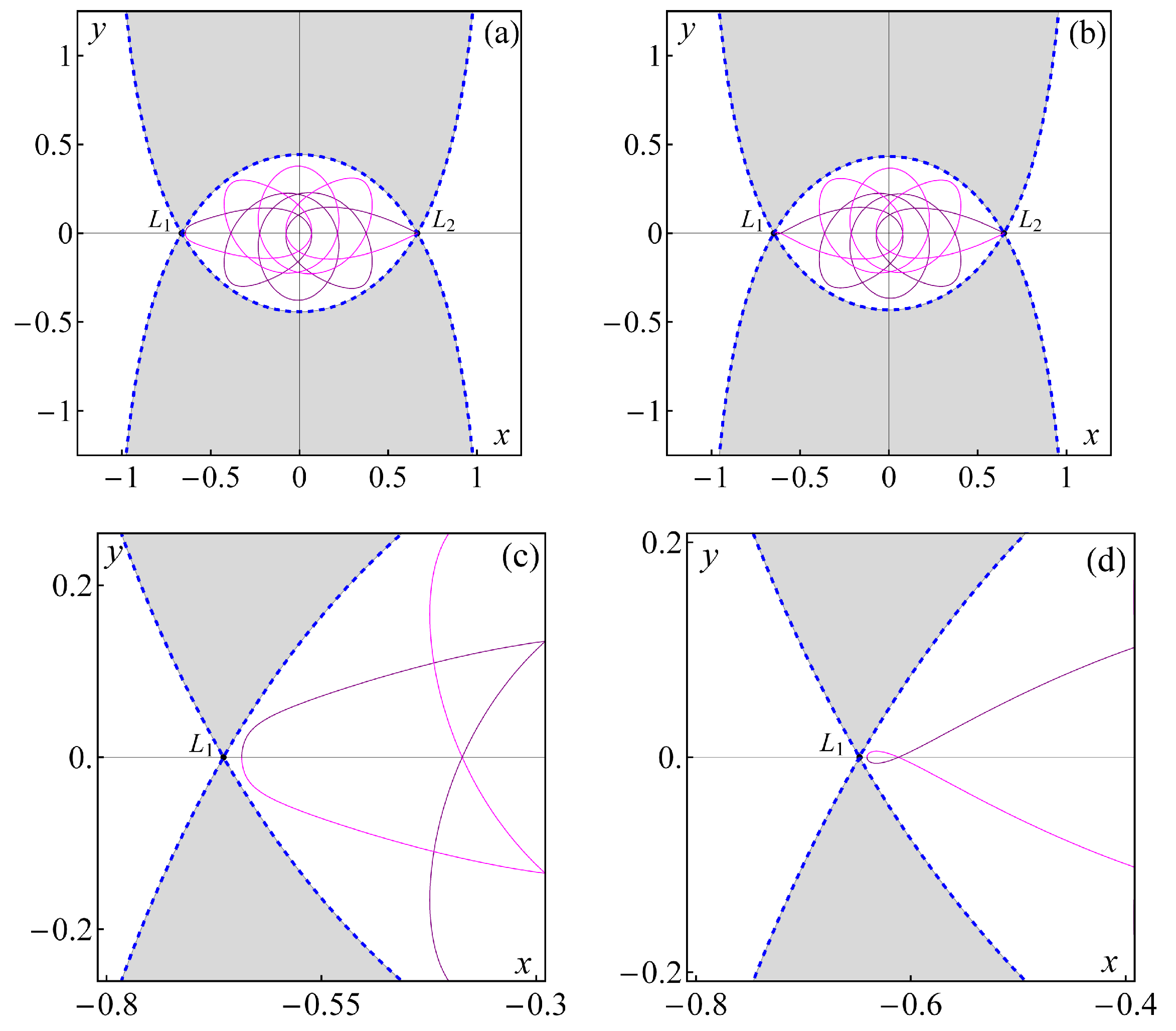
Table 1 presents some of the computed homoclinic orbits. The table includes the number of intersections N of the homoclinic orbit with the -axis, the oblateness coefficient , the equilibrium point position , the intersection point at the Nth intersection with the -axis, and the corresponding Jacobi constant C. Figure 3 illustrates two homoclinic orbits of multiplicities and , respectively, originating from the positive collinear equilibrium point . The outgoing segment of the orbit from is represented in purple, while the incoming segment approaching is shown in magenta.

Table 1.
Homoclinic orbits at the positive equilibrium point for .
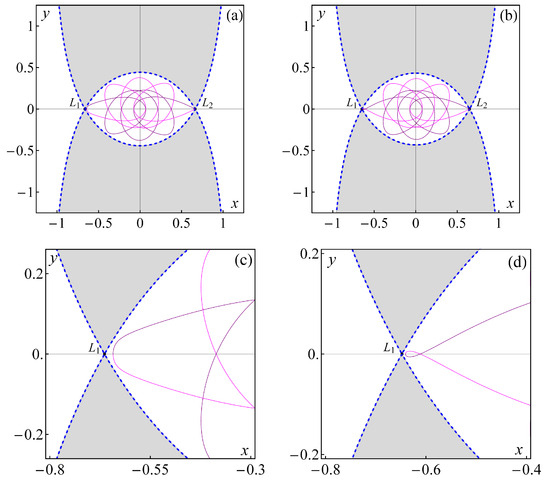
Figure 3.
Homoclinic orbits emanating from the positive equilibrium point (shown with purple color while magenta color indicate the symmetric part of the computed homoclinic trajectory with respect to the -axis). (a) Orbit with multiplicity and oblateness coefficient . (b) Orbit with multiplicity and oblateness coefficient . (c) Magnification of the first frame near . (d) Magnification of the second frame near .
5.2. Heteroclinic Orbits
To compute a heteroclinic orbit, we apply an appropriate differential correction procedure, similar to the one described in the previous subsection. However, in this case, we exploit the second symmetry of the problem with respect to the -axis. Therefore, an asymptotic orbit is heteroclinic and symmetric with respect to this axis, if the following condition is satisfied when the orbits crosses the -axis:
Again, this condition provides isolated roots; thus, as with homoclinic orbits, heteroclinic orbits in the Hill problem with oblateness are also isolated. Since this condition is not necessarily satisfied for an initial choice of the parameter , we introduce corrections such that:
Expanding this equation in a Taylor series around and retaining only the first-order terms, we obtain the necessary corrections in the form:
or equivalently
The required partial derivative may again be determined through additional numerical integrations.
To determine appropriate initial conditions for the computation of heteroclinic orbits, the O-axis is again divided into subintervals but now, the sign of is analyzed at the endpoints of these subintervals. Here, represents the time at which an orbit intersects the Oy-axis for the Nth time, where N denotes the orbit’s multiplicity. This method allows for the identification of intervals in which heteroclinic orbits exist and, consequently, facilitates the determination of appropriate initial conditions for the oblateness coefficient . Figure 4 illustrates this function for multiplicities and . These plots reveal that for all presented multiplicities, is a smooth function. Additionally, within the interval , heteroclinic orbits exist only for . Furthermore, as the orbit’s multiplicity increases, both the number of extrema and the number of roots of the function increase, indicating a corresponding growth in the number of heteroclinic orbits. Notably, our extended results (which are not presented here) suggest that for , the number of asymptotic orbits of this kind increases significantly.
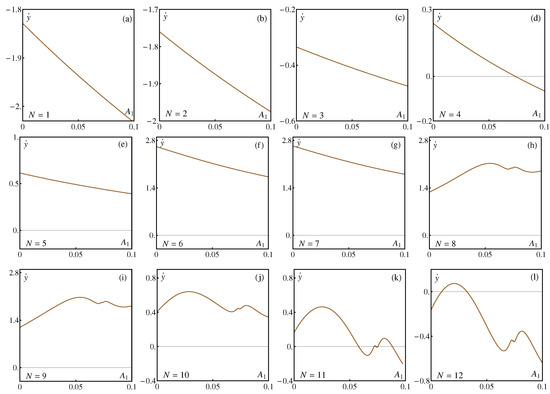
Figure 4.
The behavior of the function for intersections with the -axis.
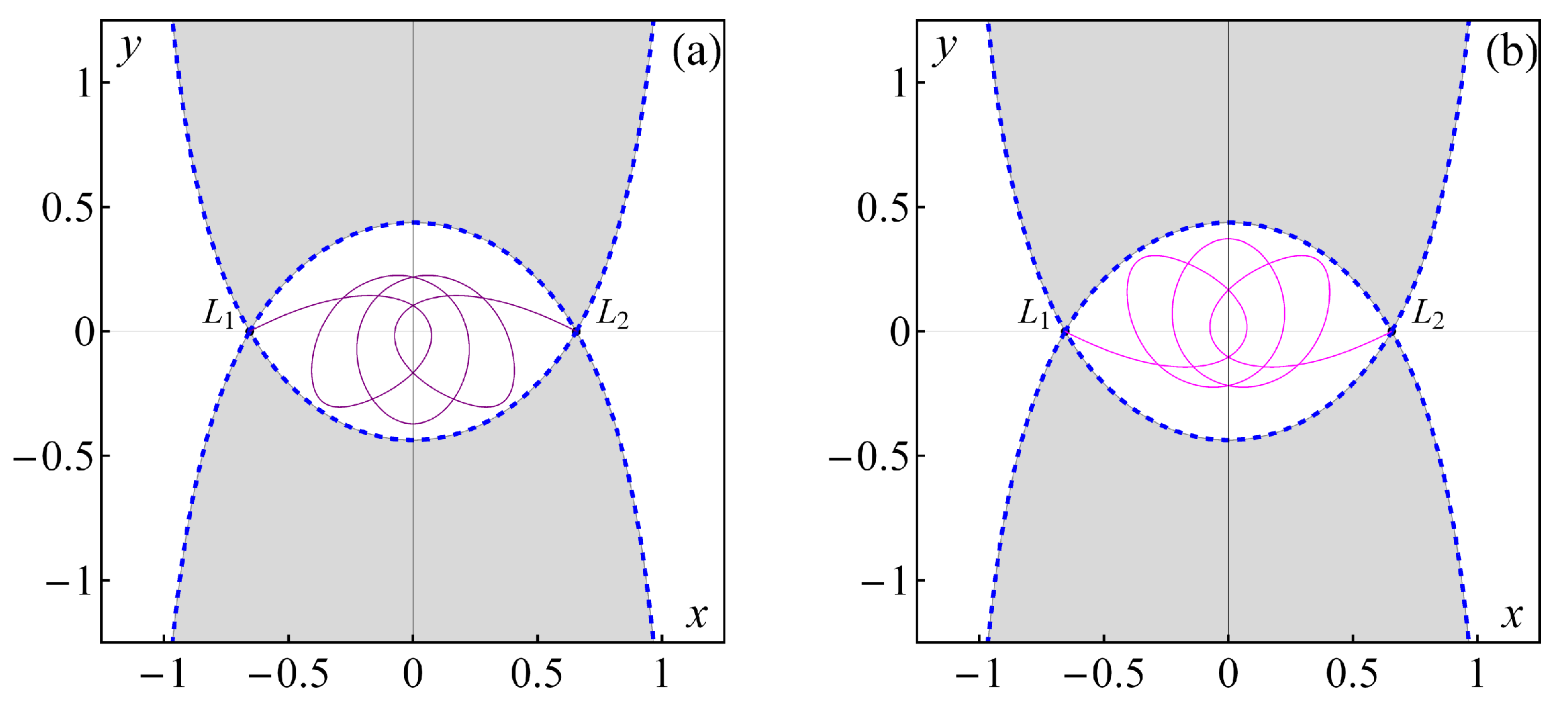
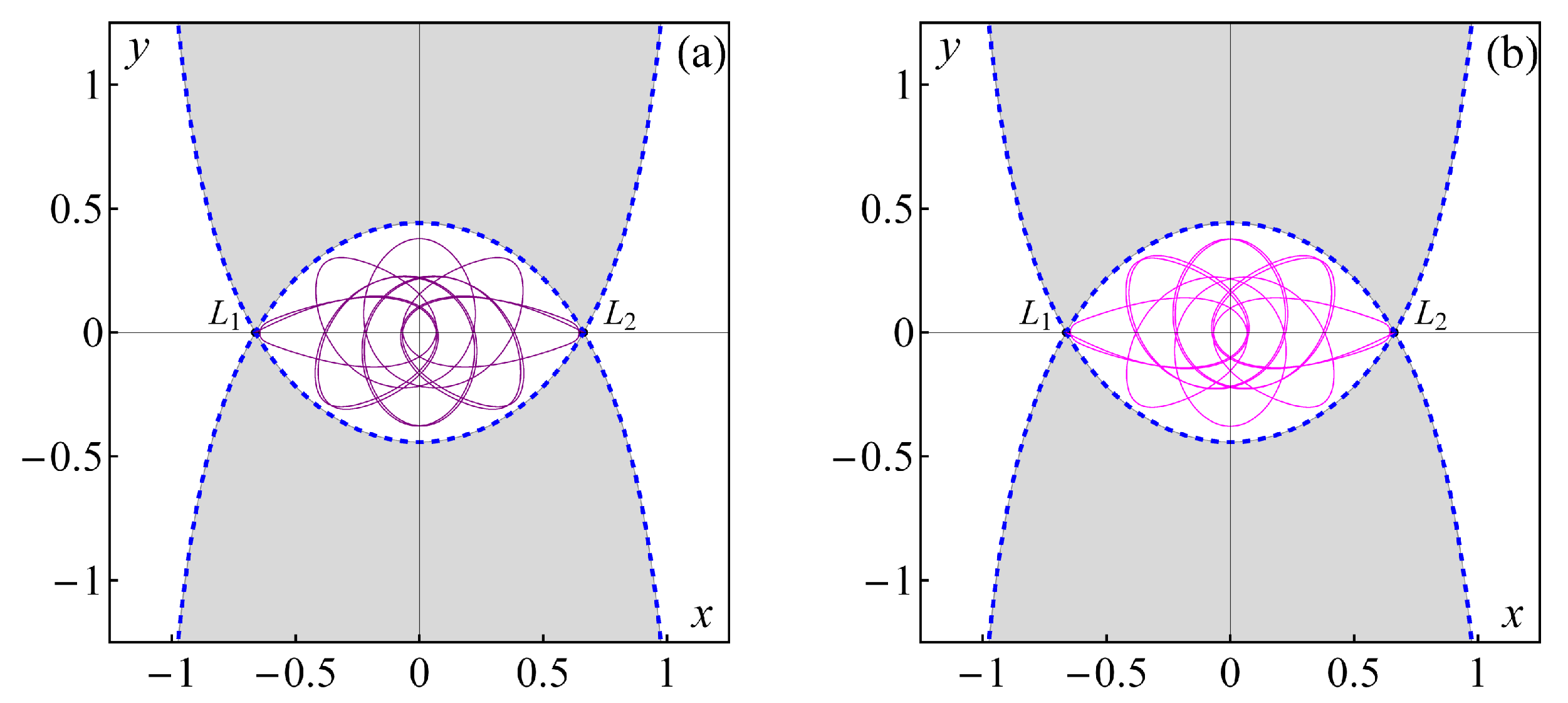
By using Figure 4, we can feed the analytical solution (31) with an appropriate value of the oblateness parameter and for , such as , to obtain fourth-order initial conditions. These conditions enable the application of the relevant corrector for the accurate computation of heteroclinic orbits that depart from the positive collinear equilibrium point and arrive at the negative equilibrium point . Due to the problem’s symmetry with respect to the axis, each such orbit has a corresponding symmetric heteroclinic counterpart. Specifically, for a heteroclinic orbit exists that departs from and reaches . Table 2 presents the computed heteroclinic orbits. Particularly, this table includes the number of intersections N of the heteroclinic orbit with the axis, the relevant value of the oblateness coefficient , the equilibrium point position , the intersection point at the Nth intersection with the axis, and the associated value of the Jacobi constant C. Figure 5 illustrates some of these trajectories. In particular, Figure 5a depicts a symmetric heteroclinic orbit of multiplicity departing from and arriving at (shown in purple) while Figure 5b displays its symmetric counterpart originating from and moving towards (shown in magenta). Figure 6 illustrates two distinct heteroclinic orbits of multiplicity , identified for the oblateness coefficient . Initial conditions for all plotted orbits are provided in Table 1 and Table 2.
Table 2.
Heteroclinic orbits at the positive equilibrium point for .
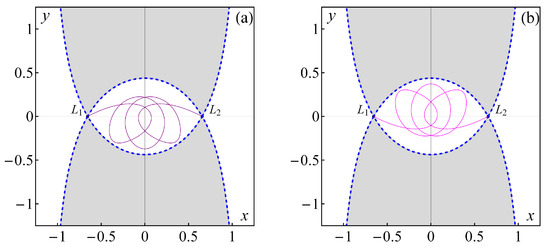
Figure 5.
Heteroclinic orbits with multiplicity and oblateness coefficient . The purple curve denotes the asymptotic trajectory which departs from the positive equilibrium point and arrives at the negative equilibrium point (frame (a)) while the magenta curve indicates its counterpart asymptotic trajectory originating from and reaching asymptotically (frame (b)).
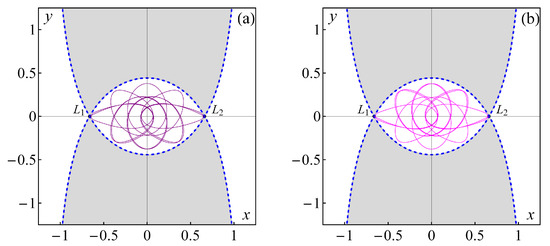
Figure 6.
Heteroclinic orbits with multiplicity and oblateness coefficient . The purple curve denotes the asymptotic trajectory which departs from the positive equilibrium point and arrives at the negative equilibrium point (frame (a)) while the magenta curve indicates its counterpart asymptotic trajectory originating from and reaching asymptotically (frame (b)).
6. Discussion and Conclusions
This study investigated asymptotic orbits associated with collinear equilibrium points in Hill’s problem, incorporating the effects of an oblate spheroidal primary. The problem’s inherent symmetry with respect to both coordinate axes played a crucial role in determining homoclinic and heteroclinic orbits. Homoclinic orbits correspond to trajectories that asymptotically depart from and return to the same equilibrium point, whereas heteroclinic orbits describe trajectories that asymptotically connect two distinct equilibrium points. To systematically compute these asymptotic orbits, a fourth-order semi-analytical approximation of the local stable and unstable manifolds of a collinear equilibrium point was derived. This approximation provided the necessary initial conditions for high-precision numerical integration, enabling the accurate identification of homoclinic and heteroclinic connections within this dynamical system.
Specifically, to determine homoclinic orbits, we numerically integrated the equations of motion with initial conditions provided by the determined solution of the unstable manifold and identified its vertical intersection with the axis. Once this condition is met, the problem’s symmetry with respect to this axis ensures that the corresponding symmetric trajectory belongs to the stable manifold of the same equilibrium point, returning to it asymptotically at infinite time and thus forming the homoclinic connection. For heteroclinic connections between two collinear equilibrium points, the Jacobi constant must be identical at both points, a condition naturally satisfied due to the problem’s symmetry with respect to the axis. Our approach relied on computing the unstable manifold of the first equilibrium point and detecting a vertical intersection of its trajectory with the axis. This intersection, combined with the symmetry of the system, guarantees that the corresponding symmetric trajectory belongs to the stable manifold of the second equilibrium point, leading to the formation of the heteroclinic connection.
In both cases of asymptotic orbits, the inclusion of oblateness in the Hill model provided the necessary conditions to systematically identify these orbits which were not obtainable in the classical formulation. This highlights the critical role of oblateness in modifying the underlying dynamical structures and expanding the range of possible connections between equilibrium points. Furthermore, the presence of asymptotic orbits at collinear equilibrium points implies the existence of stable and unstable manifolds associated with Lyapunov orbits in their vicinity. Investigating these manifolds is of fundamental importance, both theoretically and practically, as they govern transport dynamics and potential capture mechanisms. Exploring these aspects further would be a natural and valuable extension of this study.
The adopted approach presents several advantages, including its systematic methodology for identifying asymptotic orbits and its reliance on symmetry properties, which reduce computational complexity and enhance accuracy. Additionally, the semi-analytical approximation of the stable and unstable manifolds provides a robust framework for initializing numerical integrations, leading to precise orbit determination. However, certain limitations should be acknowledged. The study focused on a restricted dynamical model where perturbations beyond oblateness, such as solar radiation pressure or additional gravitational effects, were not considered. These factors may influence the existence and structure of the computed orbits in more general celestial settings. Despite these constraints, the proposed technique may offer a valuable key for space mission design and orbital transfer strategies, such as station-keeping maneuvers and natural transport pathways in planetary and lunar systems. Incorporating additional perturbative effects and extending the analysis to more generalized three-body configurations in future research could further refine and enhance the applicability of this approach.
Funding
This research received no external funding.
Data Availability Statement
Data are contained within the article.
Acknowledgments
The author would like to express his sincere appreciation to the reviewers for their helpful feedback and thoughtful suggestions. Their comments have been valuable in enhancing the clarity and quality of this manuscript.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Musielak, Z.; Quarles, B. Three Body Dynamics and Its Applications to Exoplanets; Springer Briefs in Astronomy; Springer: Cham, Switzerland, 2017. [Google Scholar]
- Gao, F.B.; Zhang, W. A study on periodic solutions for the circular restricted three-body problem. Astron. J. 2014, 148, 116. [Google Scholar] [CrossRef]
- Voyatzis, G.; Antoniadou, K.I. On quasi-satellite periodic motion in asteroid and planetary dynamics. Celest. Mech. Dyn. Astron. 2018, 130, 59. [Google Scholar] [CrossRef]
- Voyatzis, G.; Tsiganis, K.; Antoniadou, K.I. Inclined asymmetric librations in exterior resonances. Celest. Mech. Dyn. Astr. 2018, 130, 29. [Google Scholar] [CrossRef]
- Burgos-Garcia, J.; Bengochea, A. Horseshoe orbits in the restricted four-body problem. Astrophys. Space Sci. 2017, 362, 212. [Google Scholar] [CrossRef]
- Pathak, N.; Abouelmagd, E.I.; Thomas, V.O. On higher order resonant periodic orbits in the photo-gravitational planar restricted three-body problem with oblateness. J. Astronaut. Sci. 2019, 66, 475–505. [Google Scholar] [CrossRef]
- Gao, F.; Wang, R. Bifurcation analysis and periodic solutions of the HD 191408 system with triaxial and radiative perturbations. Universe 2020, 6, 35. [Google Scholar] [CrossRef]
- Zhang, R.; Wang, Y.; Shi, Y.; Xu, S. Libration points and periodic orbit families near a binary asteroid system with different shapes of the secondary. Acta Astronaut. 2020, 177, 15–29. [Google Scholar] [CrossRef]
- Wang, Y.; Xu, S. Equilibrium points and associated periodic orbits in the gravity of binary asteroid systems: (66391) 1999 KW4 as an example. Celest. Mech. Dyn. Astr. 2018, 130, 32. [Google Scholar]
- Hill, G.W. Researches in the lunar theory. Amer. J. Math. 1878, 1, 5–26. [Google Scholar] [CrossRef]
- Hénon, M. Numerical exploration of the restricted problem V. Hill’s case: Periodic orbits and their stability. Astron. Astrophys. 1969, 1, 223–238. [Google Scholar]
- Hénon, M. Vertical stability of periodic orbits in the restricted problem II. Hill’s case. Astron. Astrophys. 1974, 30, 317–321. [Google Scholar]
- Zagouras, C.; Markellos, V.V. Three-dimensional periodic solutions around equilibrium points in Hill’s problem. Celest. Mech. 1985, 35, 257–267. [Google Scholar] [CrossRef]
- Batkhin, A.B.; Batkhina, N.V. Hierarchy of periodic solutions families of spatial Hill’s problem. Sol. Syst. Res. 2009, 43, 178–183. [Google Scholar] [CrossRef]
- Kalantonis, V. Numerical investigation for periodic orbits in the Hill three-body problem. Universe 2020, 6, 72. [Google Scholar] [CrossRef]
- Aydin, C. The Conley-Zehnder indices of the spatial Hill three-body problem. Celest. Mech. Dyn. Astr. 2023, 135, 32. [Google Scholar] [CrossRef]
- Xu, X. Determination of the doubly symmetric periodic orbits in the restricted three-body problem and Hill’s lunar problem. Celest. Mech. Dyn. Astr. 2023, 135, 8. [Google Scholar] [CrossRef]
- Markellos, V.V.; Roy, A.E.; Velgakis, M.J.; Kanavos, S.S. A photogravitational Hill problem and radiation effects on Hill stability of orbits. Astrophys. Space Sci. 2000, 271, 293–301. [Google Scholar] [CrossRef]
- Kanavos, S.S.; Markellos, V.V.; Roy, A.E.; Perdios, E.A.; Douskos, C.N. The photogravitational Hill problem: Numerical exploration. Earth Moon Planets 2002, 91, 223–241. [Google Scholar] [CrossRef]
- Tsirogiannis, G.A.; Perdios, E.A.; Markellos, V.V. Improved grid search method: An efficient tool for global computation of periodic orbits: Application to Hill’s problem. Celest. Mech. Dyn. Astr. 2009, 103, 49–78. [Google Scholar] [CrossRef]
- Vincent, A.E.; Tsirogiannis, G.A.; Perdiou, A.E.; Kalantonis, V.S. Out-of-plane equilibrium points in the photogravitational Hill three-body problem. Symmetry 2024, 16, 1374. [Google Scholar] [CrossRef]
- Markellos, V.V.; Roy, A.E.; Perdios, E.A.; Douskos, C.N. A Hill problem with oblate primaries and effect of oblateness on Hill stability of orbits. Astrophys. Space Sci. 2001, 278, 295–304. [Google Scholar] [CrossRef]
- Kalantonis, V.S.; Markellos, V.V.; Perdios, E.A. Computing periodic orbits of the three-body problem: Effective convergence of Newton’s method on the surface of section. Astrophys. Space Sci. 2005, 298, 441–451. [Google Scholar] [CrossRef]
- Perdiou, A.E.; Markellos, V.V.; Douskos, C.N. The Hill problem with oblate secondary: Numerical exploration. Earth Moon Planets 2005, 97, 127–145. [Google Scholar] [CrossRef]
- Perdiou, A.E. Multiple periodic orbits in the Hill problem with oblate secondary. Earth Moon Planets 2008, 103, 105–118. [Google Scholar] [CrossRef]
- De Bustos, M.T.; Lopez, M.A.; Martinez, R.; Vera, J.A. On the periodic solutions emerging from the equilibria of the Hill Lunar problem with oblateness. Qual. Theory Dyn. Syst. 2018, 17, 331–344. [Google Scholar] [CrossRef]
- Moneer, E.M.; Alanazi, M.; Elaissi, S.; Allawi, Y.; Dubeibe, F.L.; Zotos, E.E. Orbital dynamics in the Hill problem with oblateness. Results Phys. 2023, 53, 106936. [Google Scholar] [CrossRef]
- Bouaziz, F.; Ansari, A.A. Perturbed Hill’s problem with variable mass. Astron. Nachr. 2021, 342, 666–674. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; Kalantonis, V.S.; Perdiou, A.E. A quantized Hill’s dynamical system. Adv. Astron. 2021, 2021, 9963761. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; Alhowaity, S.; Diab, Z.; Guirao, J.L.G.; Shehata, M.H. On the periodic solutions for the perturbed spatial quantized Hill problem. Mathematics 2022, 10, 614. [Google Scholar] [CrossRef]
- Ansari, A.A.; Alhowaity, S.; Abouelmagd, E.I.; Sahdev, S.K. Analysis of equilibrium points in quantized Hill system. Mathematics 2022, 10, 2186. [Google Scholar] [CrossRef]
- Vincent, A.E.; Abouelmagd, E.I.; Perdios, E.A.; Kalantonis, V.S. Numerical exploration of the quantized Hill problem dynamics. Chaos Soliton Fract. 2024, 181, 114688. [Google Scholar] [CrossRef]
- Abouelmagd, E.I. New model for Hill’s problem in the framework of continuation fractional potential. Math. Comput. Appl. 2024, 29, 34. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; Alshaery, A.A.; Gao, F. New dynamical system for circular satellites relative motion. Chaos Soliton Fract. 2024, 182, 114879. [Google Scholar] [CrossRef]
- Ibrahim, M.K.; Rabeh, T.; Abouelmagd, E.I. Dynamical properties of perturbed Hill’s system. Math. Comput. Appl. 2024, 29, 66. [Google Scholar] [CrossRef]
- Deprit, A.; Henrard, J. Symmetric doubly asymptotic orbits in the restricted three-body problem. Astron. J. 1965, 70, 271–274. [Google Scholar] [CrossRef]
- Perdios, E.A.; Markellos, V.V. Symmetric doubly–asymptotic periodic orbits at collinear equilibria. Astrophys. Space Sci. 1990, 166, 129–149. [Google Scholar] [CrossRef]
- Perdios, E.A. Non-symmetric doubly-asymptotic orbits at the outer collinear equilibrium point L3. Astrophys. Space Sci. 1993, 199, 185–188. [Google Scholar] [CrossRef]
- Perdios, E.A.; Ragos, O.; Perdiou, A.E.; Vrahatis, M.N. Symmetric doubly asymptotic orbits in the photogravitational restricted three-body problem. Nonlinear Anal. 2001, 47, 3443–3448. [Google Scholar] [CrossRef]
- Kalantonis, V.S.; Douskos, C.N.; Perdios, E.A. Numerical determination of homoclinic and heteroclinic orbits at collinear equilibria in the restricted three-body problem with oblateness. Celest. Mech. Dyn. Astr. 2006, 94, 135–153. [Google Scholar] [CrossRef]
- Perdios, E.A.; Ragos, O. Asymptotic and periodic motion around collinear equilibria in Chermnykh’s problem. Astron. Astrophys. 2004, 414, 361–371. [Google Scholar] [CrossRef]
- Sharma, R.K.; Subba Rao, P.V. Stationary solutions and their characteristic exponents in the restricted three–body problem when the more massive primary is an oblate spheroid. Celest. Mech. 1976, 13, 137–149. [Google Scholar] [CrossRef]
- Abouelmagd, E.I.; Alhothuali, M.S.; Guirao, J.L.G.; Malaikah, H.M. The effect of zonal harmonic coefficients in the framework of the restricted three body problem. Adv. Space Res. 2015, 55, 1660–1672. [Google Scholar] [CrossRef]
- Zotos, E.E.; Suraj, M.S.; Aggarwal, R.; Mittal, A. Orbit classification in the Copenhagen problem with oblate primaries. Astron. Nachr. 2019, 340, 760–770. [Google Scholar] [CrossRef]
- Suraj, M.S.; Alhowaity, S.S.; Aggarwal, R.; Asique, M.C.; Mittal, A.; Jain, M. On the topology of basins of convergence linked to libration points in the modified R3BP with oblateness. New Astron. 2022, 94, 101776. [Google Scholar] [CrossRef]
- Szebehely, V. Theory of Orbits; Academic Press: New York, NY, USA, 1967. [Google Scholar]
- Papadakis, K.E. The planar Hill problem with oblate primary. Astrophys. Space Sci. 2004, 293, 271–287. [Google Scholar] [CrossRef]
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2025 by the author. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).