

A Survey of Automotive Radar and Lidar Signal Processing and Architectures


Abstract
:1. Introduction
2. Radar
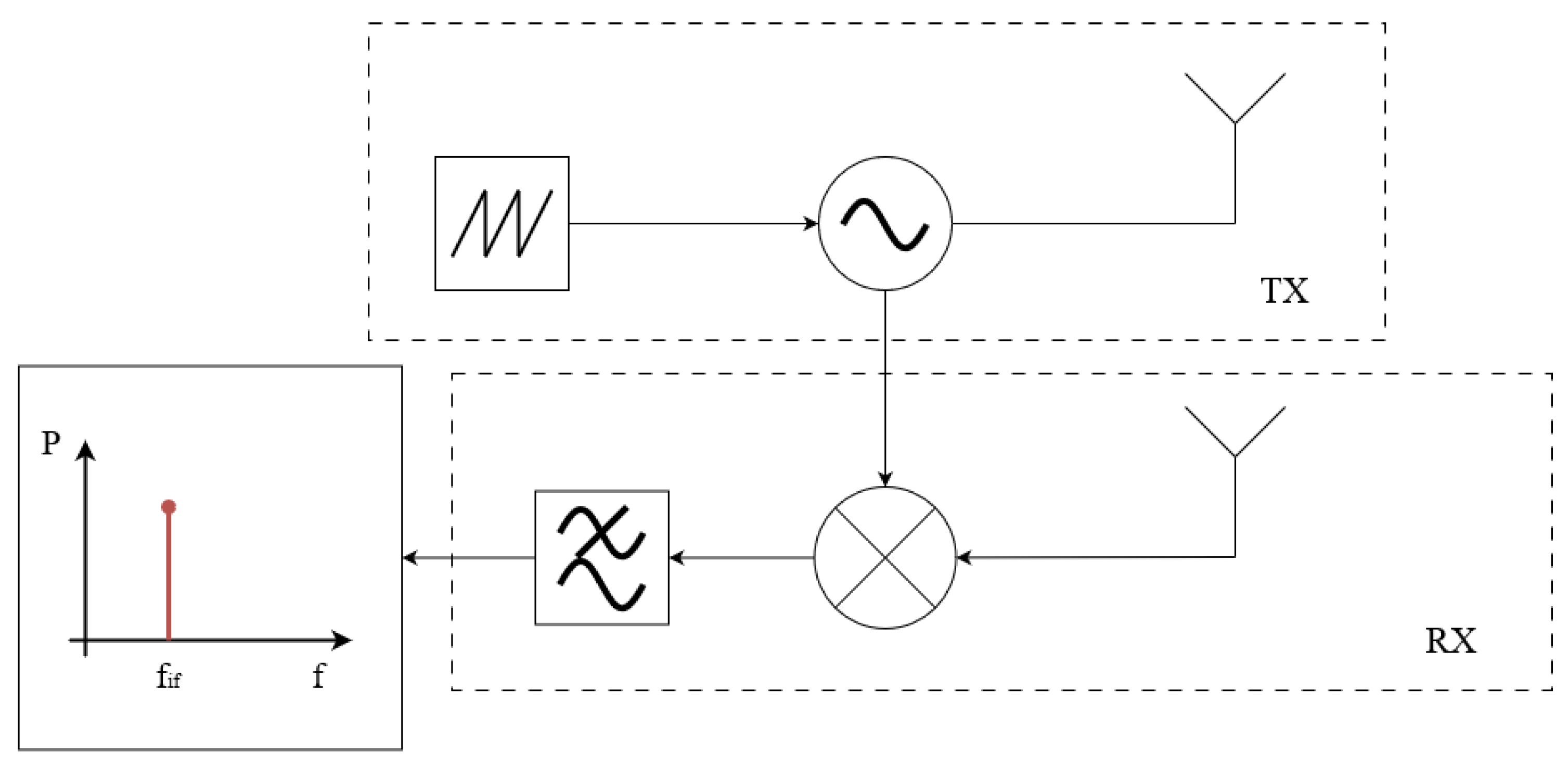
2.1. Operating Principles
2.2. Radar Technology and Modulations
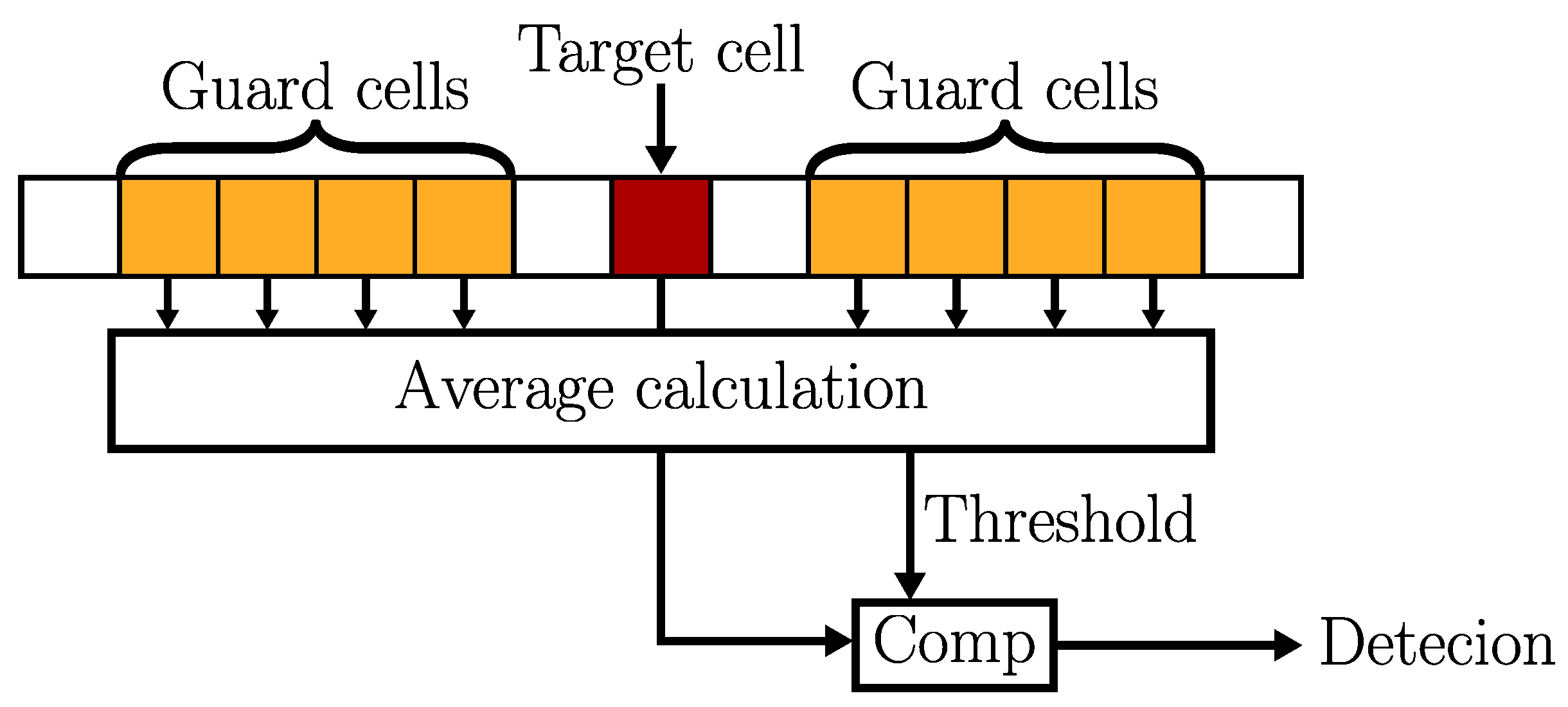
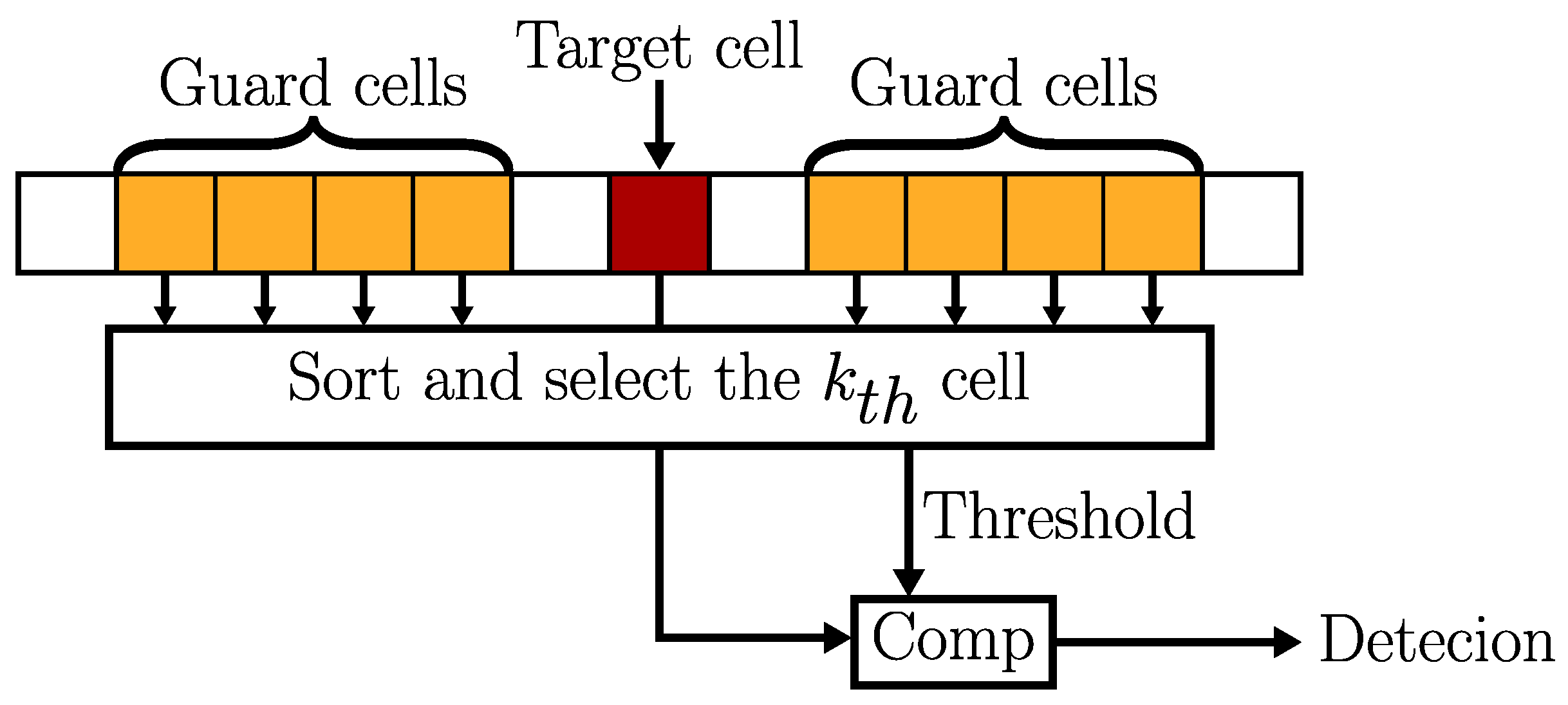
2.3. Signal Processing and Algorithms for Radars
3. Lidar
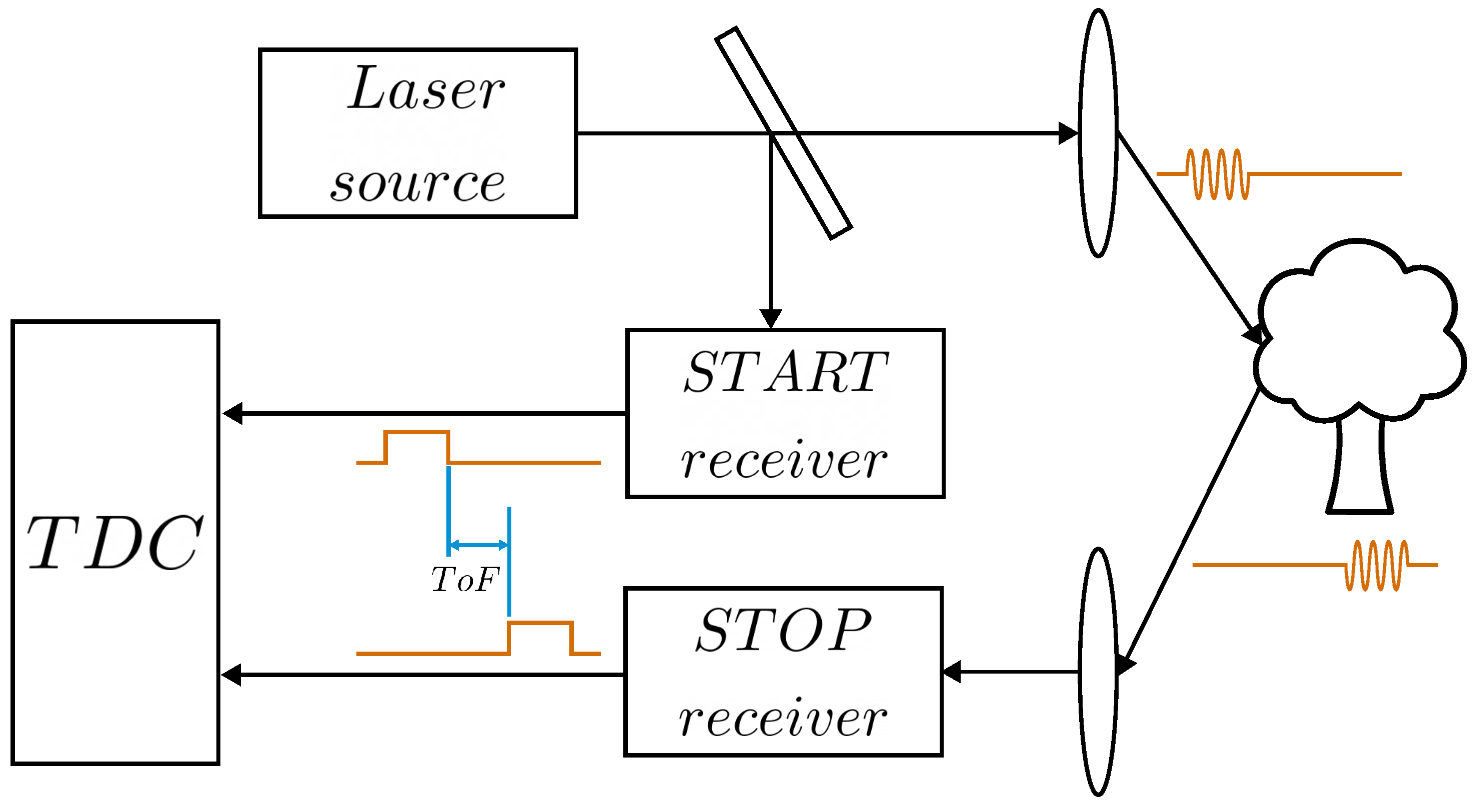
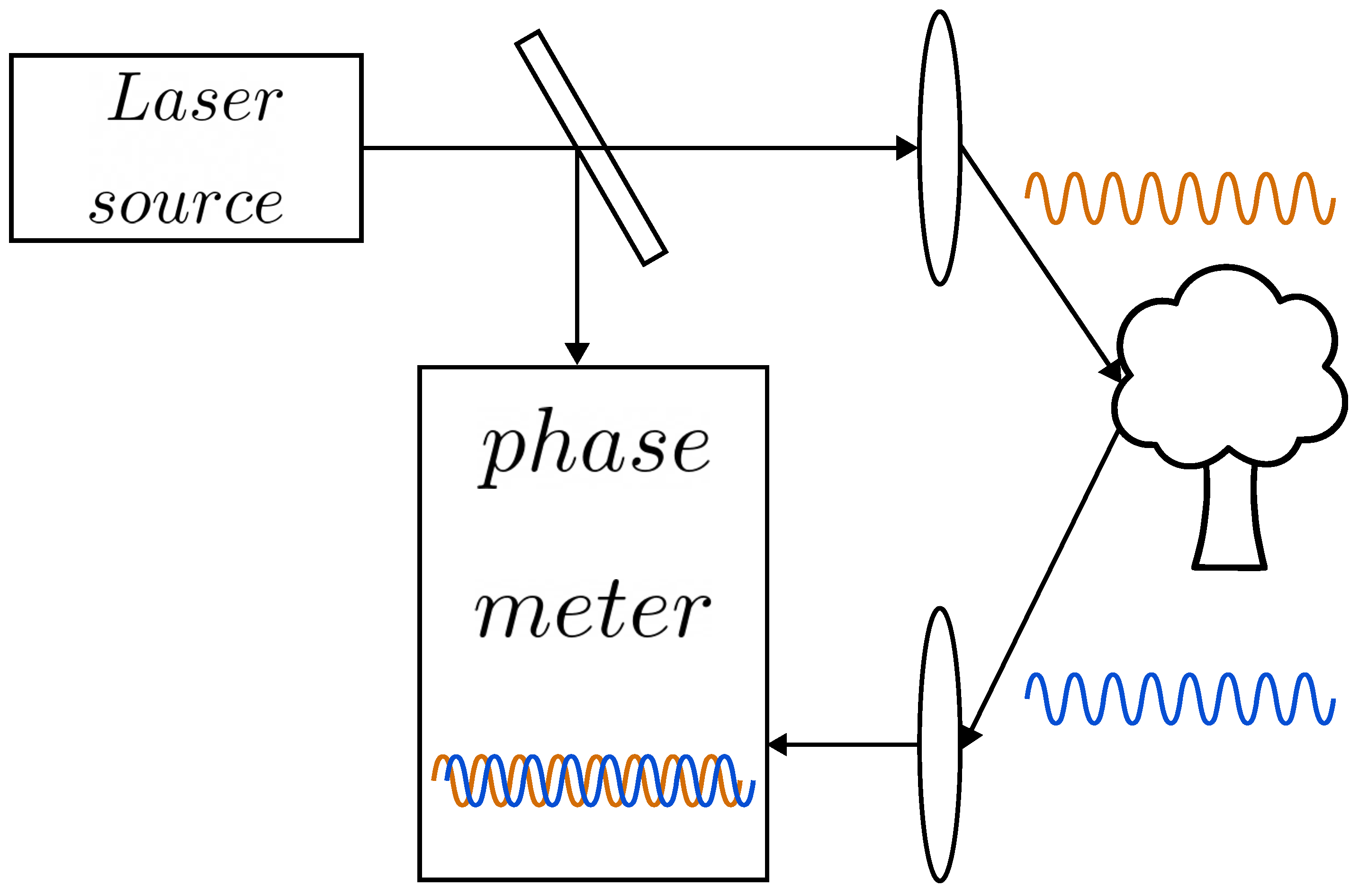
3.1. Operating Principles
3.2. Lidar Technology and Modulations
- Rotor-based mechanical lidar;
- Scanning solid-state lidar;
- Full solid-state lidar.
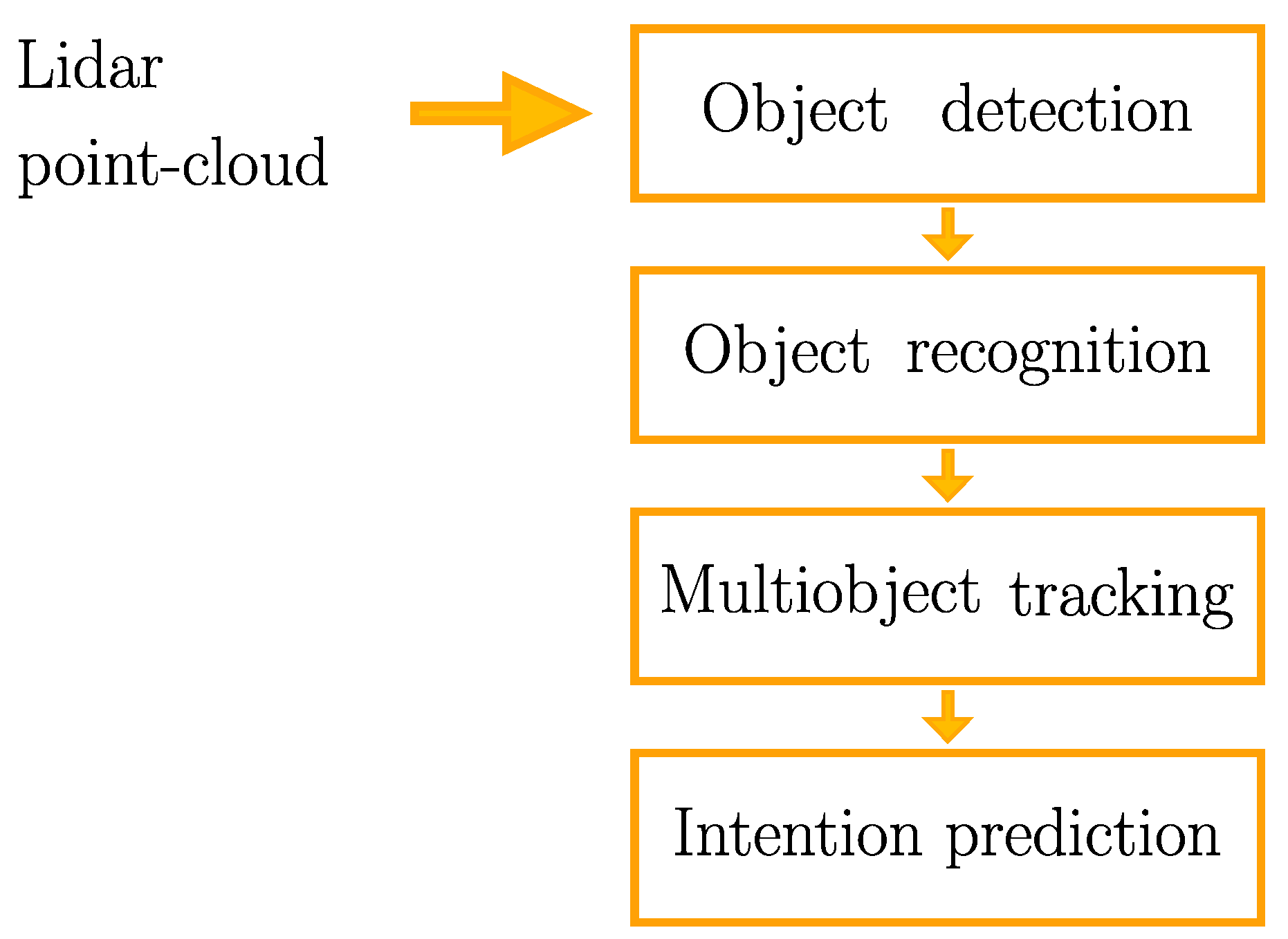
3.3. Signal Processing and Algorithms for Lidar
4. Sensor Fusion
5. Digital Hardware Architectures for On-Vehicle Sensing Tasks
6. Comparison and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Grimes, D.; Jones, T. Automotive radar: A brief review. Proc. IEEE 1974, 62, 804–822. [Google Scholar] [CrossRef]
- Fölster, F.; Rohling, H. Signal processing structure for automotive radar. Frequenz 2006, 60, 20–24. [Google Scholar] [CrossRef]
- Hasch, J.; Topak, E.; Schnabel, R.; Zwick, T.; Weigel, R.; Waldschmidt, C. Millimeter-Wave Technology for Automotive Radar Sensors in the 77 GHz Frequency Band. IEEE Trans. Microw. Theory Tech. 2012, 60, 845–860. [Google Scholar] [CrossRef]
- Hakobyan, G.; Yang, B. High-Performance Automotive Radar: A Review of Signal Processing Algorithms and Modulation Schemes. IEEE Signal Process. Mag. 2019, 36, 32–44. [Google Scholar] [CrossRef]
- Patole, S.M.; Torlak, M.; Wang, D.; Ali, M. Automotive radars: A review of signal processing techniques. IEEE Signal Process. Mag. 2017, 34, 22–35. [Google Scholar] [CrossRef]
- Behroozpour, B.; Sandborn, P.A.M.; Wu, M.C.; Boser, B.E. Lidar System Architectures and Circuits. IEEE Commun. Mag. 2017, 55, 135–142. [Google Scholar] [CrossRef]
- Royo, S.; Ballesta-Garcia, M. An Overview of Lidar Imaging Systems for Autonomous Vehicles. Appl. Sci. 2019, 9, 4093. [Google Scholar] [CrossRef]
- Gharineiat, Z.; Kurdi, F.T.; Campbell, G. Review of Automatic Processing of Topography and Surface Feature Identification LiDAR Data Using Machine Learning Techniques. Remote Sens. 2022, 14, 4685. [Google Scholar] [CrossRef]
- Mirzaei, K.; Arashpour, M.; Asadi, E.; Masoumi, H.; Bai, Y.; Behnood, A. 3D point cloud data processing with machine learning for construction and infrastructure applications: A comprehensive review. Adv. Eng. Inform. 2022, 51, 101501. [Google Scholar] [CrossRef]
- Alaba, S.Y.; Ball, J.E. A Survey on Deep-Learning-Based LiDAR 3D Object Detection for Autonomous Driving. Sensors 2022, 22, 9577. [Google Scholar] [CrossRef]
- Li, Y.; Ibanez-Guzman, J. Lidar for Autonomous Driving: The Principles, Challenges, and Trends for Automotive Lidar and Perception Systems. IEEE Signal Process. Mag. 2020, 37, 50–61. [Google Scholar] [CrossRef]
- Roriz, R.; Cabral, J.; Gomes, T. Automotive LiDAR Technology: A Survey. IEEE Trans. Intell. Transp. Syst. 2022, 23, 6282–6297. [Google Scholar] [CrossRef]
- Bilik, I. Comparative Analysis of Radar and Lidar Technologies for Automotive Applications. IEEE Intell. Transp. Syst. Mag. 2023, 15, 244–269. [Google Scholar] [CrossRef]
- James, R. A history of radar. IEE Rev. 1989, 35, 343. [Google Scholar] [CrossRef]
- Fan, R.; Wang, L.; Bocus, M.J.; Pitas, I. Computer Stereo Vision for Autonomous Driving: Theory and Algorithms. In Studies in Computational Intelligence; Springer International Publishing: Cham, Switzerland, 2023; pp. 41–70. [Google Scholar] [CrossRef]
- Skolnik, M.I. Introduction to Radar Systems; McGraw-Hill Education: Noida, India, 2018. [Google Scholar]
- Alizadeh, M.; Shaker, G.; Almeida, J.C.M.D.; Morita, P.P.; Safavi-Naeini, S. Remote Monitoring of Human Vital Signs Using mm-Wave FMCW Radar. IEEE Access 2019, 7, 54958–54968. [Google Scholar] [CrossRef]
- Kronauge, M.; Rohling, H. New chirp sequence radar waveform. IEEE Trans. Aerosp. Electron. Syst. 2014, 50, 2870–2877. [Google Scholar] [CrossRef]
- Gill, T. The Doppler Effect: An Introduction to the Theory of the Effect; Scientific Monographs on Physics; Logos Press: Moscow, ID, USA, 1965. [Google Scholar]
- Winkler, V. Range Doppler detection for automotive FMCW radars. In Proceedings of the 2007 European Radar Conference, Munich, Germany, 10–12 October 2007. [Google Scholar] [CrossRef]
- Rohling, H. Radar CFAR Thresholding in Clutter and Multiple Target Situations. IEEE Trans. Aerosp. Electron. Syst. 1983, AES-19, 608–621. [Google Scholar] [CrossRef]
- Bourdoux, A.; Ahmad, U.; Guermandi, D.; Brebels, S.; Dewilde, A.; Thillo, W.V. PMCW waveform and MIMO technique for a 79 GHz CMOS automotive radar. In Proceedings of the 2016 IEEE Radar Conference (RadarConf), Philadelphia, PA, USA, 2–6 May 2016. [Google Scholar] [CrossRef]
- Sur, S.N.; Sharma, P.; Saikia, H.; Banerjee, S.; Singh, A.K. OFDM Based RADAR-Communication System Development. Procedia Comput. Sci. 2020, 171, 2252–2260. [Google Scholar] [CrossRef]
- Beise, H.P.; Stifter, T.; Schroder, U. Virtual interference study for FMCW and PMCW radar. In Proceedings of the 2018 11th German Microwave Conference (GeMiC), Freiburg, Germany, 12–14 March 2018. [Google Scholar] [CrossRef]
- Levanon, N.; Mozeson, E. Matched Filter. In Radar Signals; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2004; Chapter 2; pp. 20–33. [Google Scholar] [CrossRef]
- Langevin, P. Some sequences with good autocorrelation properties. In Contemporary Mathematics; American Mathematical Society: Providence, RI, USA, 1994. [Google Scholar] [CrossRef]
- Jungnickel, D.; Pott, A. Perfect and almost perfect sequences. Discret. Appl. Math. 1999, 95, 331–359. [Google Scholar] [CrossRef]
- Knill, C.; Embacher, F.; Schweizer, B.; Stephany, S.; Waldschmidt, C. Coded OFDM Waveforms for MIMO Radars. IEEE Trans. Veh. Technol. 2021, 70, 8769–8780. [Google Scholar] [CrossRef]
- Braun, M.; Sturm, C.; Jondral, F.K. On the single-target accuracy of OFDM radar algorithms. In Proceedings of the 2011 IEEE 22nd International Symposium on Personal, Indoor and Mobile Radio Communications, Toronto, ON, Canada, 11–14 September 2011. [Google Scholar] [CrossRef]
- Sturm, C.; Wiesbeck, W. Waveform Design and Signal Processing Aspects for Fusion of Wireless Communications and Radar Sensing. Proc. IEEE 2011, 99, 1236–1259. [Google Scholar] [CrossRef]
- Fink, J.; Jondral, F.K. Comparison of OFDM radar and chirp sequence radar. In Proceedings of the 2015 16th International Radar Symposium (IRS), Dresden, Germany, 24–26 June 2015. [Google Scholar] [CrossRef]
- Vasanelli, C.; Roos, F.; Durr, A.; Schlichenmaier, J.; Hugler, P.; Meinecke, B.; Steiner, M.; Waldschmidt, C. Calibration and Direction-of-Arrival Estimation of Millimeter-Wave Radars: A Practical Introduction. IEEE Antennas Propag. Mag. 2020, 62, 34–45. [Google Scholar] [CrossRef]
- Duly, A.J.; Love, D.J.; Krogmeier, J.V. Time-Division Beamforming for MIMO Radar Waveform Design. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1210–1223. [Google Scholar] [CrossRef]
- Feger, R.; Pfeffer, C.; Stelzer, A. A Frequency-Division MIMO FMCW Radar System Based on Delta–Sigma Modulated Transmitters. IEEE Trans. Microw. Theory Tech. 2014, 62, 3572–3581. [Google Scholar] [CrossRef]
- Sun, Y.; Bauduin, M.; Bourdoux, A. Enhancing Unambiguous Velocity in Doppler-Division Multiplexing MIMO Radar. In Proceedings of the 2021 18th European Radar Conference (EuRAD), London, UK, 5–7 April 2022. [Google Scholar] [CrossRef]
- Sun, S.; Petropulu, A.P.; Poor, H.V. MIMO Radar for Advanced Driver-Assistance Systems and Autonomous Driving: Advantages and Challenges. IEEE Signal Process. Mag. 2020, 37, 98–117. [Google Scholar] [CrossRef]
- Cheng, Y.; Su, J.; Chen, H.; Liu, Y. A New Automotive Radar 4D Point Clouds Detector by Using Deep Learning. In Proceedings of the ICASSP 2021–2021 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Toronto, ON, Canada, 6–11 June 2021. [Google Scholar] [CrossRef]
- Han, Z.; Wang, J.; Xu, Z.; Yang, S.; He, L.; Xu, S.; Wang, J. 4D Millimeter-Wave Radar in Autonomous Driving: A Survey. arXiv 2023, arXiv:2306.04242. [Google Scholar] [CrossRef]
- Magaz, B.; Belouchrani, A.; Hamadouche, M. Automatic threshold selection in OS-CFAR radar detection using information theoretic criteria. Prog. Electromagn. Res. B 2011, 30, 157–175. [Google Scholar] [CrossRef]
- Lin, C.H.; Lin, Y.C.; Bai, Y.; Chung, W.H.; Lee, T.S.; Huttunen, H. DL-CFAR: A Novel CFAR Target Detection Method Based on Deep Learning. In Proceedings of the 2019 IEEE 90th Vehicular Technology Conference (VTC2019-Fall), Honolulu, HI, USA, 22–25 September 2019. [Google Scholar] [CrossRef]
- Hyun, E.; Lee, J.H. A New OS-CFAR Detector Design. In Proceedings of the 2011 First ACIS/JNU International Conference on Computers, Networks, Systems and Industrial Engineering, Jeju, Republic of Korea, 23–25 May 2011. [Google Scholar] [CrossRef]
- Macaveiu, A.; Campeanu, A. Automotive radar target tracking by Kalman filtering. In Proceedings of the 2013 11th International Conference on Telecommunications in Modern Satellite, Cable and Broadcasting Services (TELSIKS), Nis, Serbia, 16–19 October 2013. [Google Scholar] [CrossRef]
- Chen, B.; Dang, L.; Zheng, N.; Principe, J.C. Kalman Filtering. In Kalman Filtering Under Information Theoretic Criteria; Springer International Publishing: Cham, Switzerland, 2023; pp. 11–51. [Google Scholar] [CrossRef]
- Wu, C.; Lin, Y.; Eskandarian, A. Cooperative Adaptive Cruise Control with Adaptive Kalman Filter Subject to Temporary Communication Loss. IEEE Access 2019, 7, 93558–93568. [Google Scholar] [CrossRef]
- Lang, P.; Fu, X.; Martorella, M.; Dong, J.; Qin, R.; Meng, X.; Xie, M. A Comprehensive Survey of Machine Learning Applied to Radar Signal Processing. arXiv 2020, arXiv:abs/2009.13702. [Google Scholar]
- Geng, Z.; Yan, H.; Zhang, J.; Zhu, D. Deep-Learning for Radar: A Survey. IEEE Access 2021, 9, 141800–141818. [Google Scholar] [CrossRef]
- Kim, W.; Cho, H.; Kim, J.; Kim, B.; Lee, S. Target Classification Using Combined YOLO-SVM in High-Resolution Automotive FMCW Radar. In Proceedings of the 2020 IEEE Radar Conference (RadarConf20), Florence, Italy, 21–25 September 2020. [Google Scholar] [CrossRef]
- Zheng, R.; Sun, S.; Scharff, D.; Wu, T. Spectranet: A High Resolution Imaging Radar Deep Neural Network for Autonomous Vehicles. In Proceedings of the 2022 IEEE 12th Sensor Array and Multichannel Signal Processing Workshop (SAM), Trondheim, Norway, 20–23 June 2022. [Google Scholar] [CrossRef]
- Hulburt, E.O. Observations of a Searchlight Beam to an Altitude of 28 Kilometers. J. Opt. Soc. Am. 1937, 27, 377–382. [Google Scholar] [CrossRef]
- Middleton, W.E.K.; Spilhaus, A.F. Meteorological Instruments. Q. J. R. Meteorol. Soc. 1954, 80, 484. [Google Scholar] [CrossRef]
- Maiman, T.H. Stimulated Optical Radiation in Ruby. Nature 1960, 187, 493–494. [Google Scholar] [CrossRef]
- Warren, M.E. Automotive LIDAR Technology. In Proceedings of the 2019 Symposium on VLSI Circuits, Kyoto, Japan, 9–14 June 2019. [Google Scholar] [CrossRef]
- Chen, C.; Xiong, G.; Zhang, Z.; Gong, J.; Qi, J.; Wang, C. 3D LiDAR-GPS/IMU Calibration Based on Hand-Eye Calibration Model for Unmanned Vehicle. In Proceedings of the 2020 3rd International Conference on Unmanned Systems (ICUS), Harbin, China, 27–28 November 2020. [Google Scholar] [CrossRef]
- Liu, J.; Sun, Q.; Fan, Z.; Jia, Y. TOF Lidar Development in Autonomous Vehicle. In Proceedings of the 2018 IEEE 3rd Optoelectronics Global Conference (OGC), Shenzhen, China, 4–7 September 2018. [Google Scholar] [CrossRef]
- Dieckmann, A.; Amann, M.C. Frequency-modulated continuous-wave (FMCW) lidar with tunable twin-guide laser diode. In Automated 3D and 2D Vision; Kamerman, G.W., Keicher, W.E., Eds.; SPIE’s 1994 International Symposium on Optics, Imaging, and Instrumentation: San Diego, CA, USA, 1994. [Google Scholar] [CrossRef]
- Hejazi, A.; Oh, S.; Rehman, M.R.U.; Rad, R.E.; Kim, S.; Lee, J.; Pu, Y.; Hwang, K.C.; Yang, Y.; Lee, K.Y. A Low-Power Multichannel Time-to-Digital Converter Using All-Digital Nested Delay-Locked Loops with 50-ps Resolution and High Throughput for LiDAR Sensors. IEEE Trans. Instrum. Meas. 2020, 69, 9262–9271. [Google Scholar] [CrossRef]
- Kim, T.; Ngai, T.; Timalsina, Y.; Watts, M.R.; Stojanovic, V.; Bhargava, P.; Poulton, C.V.; Notaros, J.; Yaacobi, A.; Timurdogan, E.; et al. A Single-Chip Optical Phased Array in a Wafer-Scale Silicon Photonics/CMOS 3D-Integration Platform. IEEE J. Solid State Circuits 2019, 54, 3061–3074. [Google Scholar] [CrossRef]
- Fatemi, R.; Abiri, B.; Khachaturian, A.; Hajimiri, A. High sensitivity active flat optics optical phased array receiver with a two-dimensional aperture. Opt. Express 2018, 26, 29983. [Google Scholar] [CrossRef]
- Lemmetti, J.; Sorri, N.; Kallioniemi, I.; Melanen, P.; Uusimaa, P. Long-range all-solid-state flash LiDAR sensor for autonomous driving. In High-Power Diode Laser Technology XIX; Zediker, M.S., Ed.; SPIE Digital Library: Bellingham, WA, USA, 2021. [Google Scholar] [CrossRef]
- Li, N.; Ho, C.P.; Xue, J.; Lim, L.W.; Chen, G.; Fu, Y.H.; Lee, L.Y.T. A Progress Review on Solid-State LiDAR and Nanophotonics-Based LiDAR Sensors. Laser Photonics Rev. 2022, 16, 2100511. [Google Scholar] [CrossRef]
- Bogoslavskyi, I.; Stachniss, C. Fast range image-based segmentation of sparse 3D laser scans for online operation. In Proceedings of the 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, Republic of Korea, 9–14 October 2016. [Google Scholar] [CrossRef]
- Le, M.H.; Cheng, C.H.; Liu, D.G. An Efficient Adaptive Noise Removal Filter on Range Images for LiDAR Point Clouds. Electronics 2023, 12, 2150. [Google Scholar] [CrossRef]
- Chen, T.; Dai, B.; Liu, D.; Song, J. Performance of global descriptors for velodyne-based urban object recognition. In Proceedings of the 2014 IEEE Intelligent Vehicles Symposium Proceedings, Dearborn, MI, USA, 8–11 June 2014. [Google Scholar] [CrossRef]
- Himmelsbach, M.; Mueller, A.D.I.; Luettel, T.; Wunsche, H.J. LIDAR-based 3 D Object Perception. In Proceedings of the 1st International Workshop on Cognition for Technical Systems, Munich, Germany, 6–8 October 2008. [Google Scholar]
- Anguelov, D.; Taskar, B.; Chatalbashev, V.; Koller, D.; Gupta, D.; Heitz, G.; Ng, A. Discriminative Learning of Markov Random Fields for Segmentation of 3D Scan Data. In Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, CA, USA, 20–25 June 2005. [Google Scholar] [CrossRef]
- Lalonde, J.F.; Vandapel, N.; Huber, D.F.; Hebert, M. Natural terrain classification using three-dimensional ladar data for ground robot mobility. J. Field Robot. 2006, 23, 839–861. [Google Scholar] [CrossRef]
- Capellier, E.; Davoine, F.; Cherfaoui, V.; Li, Y. Evidential deep learning for arbitrary LIDAR object classification in the context of autonomous driving. In Proceedings of the 2019 IEEE Intelligent Vehicles Symposium (IV), Paris, France, 9–12 June 2019. [Google Scholar] [CrossRef]
- Lee, H.; Lee, H.; Shin, D.; Yi, K. Moving Objects Tracking Based on Geometric Model-Free Approach with Particle Filter Using Automotive LiDAR. IEEE Trans. Intell. Transp. Syst. 2022, 23, 17863–17872. [Google Scholar] [CrossRef]
- Negash, N.M.; Yang, J. Driver Behavior Modeling Toward Autonomous Vehicles: Comprehensive Review. IEEE Access 2023, 11, 22788–22821. [Google Scholar] [CrossRef]
- Zhou, Y.; Tuzel, O. VoxelNet: End-to-End Learning for Point Cloud Based 3D Object Detection. In Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition, Salt Lake City, UT, USA, 18–22 June 2018. [Google Scholar] [CrossRef]
- Ye, M.; Xu, S.; Cao, T. HVNet: Hybrid Voxel Network for LiDAR Based 3D Object Detection. In Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, WA, USA, 14–19 June 2020. [Google Scholar] [CrossRef]
- Yan, Y.; Mao, Y.; Li, B. SECOND: Sparsely Embedded Convolutional Detection. Sensors 2018, 18, 3337. [Google Scholar] [CrossRef] [PubMed]
- Senel, N.; Kefferpütz, K.; Doycheva, K.; Elger, G. Multi-Sensor Data Fusion for Real-Time Multi-Object Tracking. Processes 2023, 11, 501. [Google Scholar] [CrossRef]
- Steinbaeck, J.; Steger, C.; Holweg, G.; Druml, N. Next generation radar sensors in automotive sensor fusion systems. In Proceedings of the 2017 Sensor Data Fusion: Trends, Solutions, Applications (SDF), Bonn, Germany, 10–12 October 2017. [Google Scholar] [CrossRef]
- Walchshäusl, L.; Lindl, R.; Vogel, K.; Tatschke, T. Detection of Road Users in Fused Sensor Data Streams for Collision Mitigation. In Advanced Microsystems for Automotive Applications 2006; Springer: Berlin/Heidelberg, Germany, 2006; pp. 53–65. [Google Scholar] [CrossRef]
- Chen, H.; Kirubarajan, T. Performance limits of track-to-track fusion versus centralized estimation: Theory and application. IEEE Trans. Aerosp. Electron. Syst. 2003, 39, 386–400. [Google Scholar] [CrossRef]
- Wang, X.; Xu, L.; Sun, H.; Xin, J.; Zheng, N. On-Road Vehicle Detection and Tracking Using MMW Radar and Monovision Fusion. IEEE Trans. Intell. Transp. Syst. 2016, 17, 2075–2084. [Google Scholar] [CrossRef]
- Zhou, Y.; Dong, Y.; Hou, F.; Wu, J. Review on Millimeter-Wave Radar and Camera Fusion Technology. Sustainability 2022, 14, 5114. [Google Scholar] [CrossRef]
- Bai, X.; Hu, Z.; Zhu, X.; Huang, Q.; Chen, Y.; Fu, H.; Tai, C.L. TransFusion: Robust LiDAR-Camera Fusion for 3D Object Detection with Transformers. In Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), New Orleans, LA, USA, 19–24 June 2022. [Google Scholar] [CrossRef]
- Subburaj, K.; Narayanan, N.; Mani, A.; Ramasubramanian, K.; Ramalingam, S.; Nayyar, J.; Dandu, K.; Bhatia, K.; Arora, M.; Jayanthi, S.; et al. Single-Chip 77GHz FMCW Automotive Radar with Integrated Front-End and Digital Processing. In Proceedings of the 2022 23rd International Radar Symposium (IRS), Gdansk, Poland, 12–14 September 2022. [Google Scholar] [CrossRef]
- Bailey, S.; Rigge, P.; Han, J.; Lin, R.; Chang, E.Y.; Mao, H.; Wang, Z.; Markley, C.; Izraelevitz, A.M.; Wang, A.; et al. A Mixed-Signal RISC-V Signal Analysis SoC Generator with a 16-nm FinFET Instance. IEEE J. Solid State Circuits 2019, 54, 2786–2801. [Google Scholar] [CrossRef]
- Meinl, F.; Stolz, M.; Kunert, M.; Blume, H. An experimental high performance radar system for highly automated driving. In Proceedings of the 2017 IEEE MTT-S International Conference on Microwaves for Intelligent Mobility (ICMIM), Nagoya, Japan, 19–21 March 2017. [Google Scholar] [CrossRef]
- Nagalikar, S.; Mody, M.; Baranwal, A.; Kumar, V.; Shankar, P.; Farooqui, M.A.; Shah, M.; Sangani, N.; Rakesh, Y.; Karkisaval, A.; et al. Single Chip Radar Processing for Object Detection. In Proceedings of the 2023 IEEE International Conference on Consumer Electronics (ICCE), Las Vegas, NV, USA, 6–8 January 2023. [Google Scholar] [CrossRef]
- Saponara, S. Hardware accelerator IP cores for real time Radar and camera-based ADAS. J. Real Time Image Process. 2016, 16, 1493–1510. [Google Scholar] [CrossRef]
- Zhang, M.; Li, X. An Efficient Real-Time Two-Dimensional CA-CFAR Hardware Engine. In Proceedings of the 2019 IEEE International Conference on Electron Devices and Solid-State Circuits (EDSSC), Xi’an, China, 12–14 June 2019. [Google Scholar] [CrossRef]
- Tao, X.; Zhang, D.; Wang, M.; Ma, Y.; Song, Y. Design and Implementation of A High-speed Configurable 2D ML-CFAR Detector. In Proceedings of the 2021 IEEE 14th International Conference on ASIC (ASICON), Kunming, China, 26–29 October 2021. [Google Scholar] [CrossRef]
- Sim, Y.; Heo, J.; Jung, Y.; Lee, S.; Jung, Y. FPGA Implementation of Efficient CFAR Algorithm for Radar Systems. Sensors 2023, 23, 954. [Google Scholar] [CrossRef]
- Petrovic, M.L.; Milovanovic, V.M. A Design Generator of Parametrizable and Runtime Configurable Constant False Alarm Rate Processors. In Proceedings of the 2021 28th IEEE International Conference on Electronics, Circuits, and Systems (ICECS), Dubai, United Arab Emirates, 28 November–1 December 2021. [Google Scholar] [CrossRef]
- Djemal, R.; Belwafi, K.; Kaaniche, W.; Alshebeili, S.A. An FPGA-based implementation of HW/SW architecture for CFAR radar target detector. In Proceedings of the ICM 2011 Proceeding, Hammamet, Tunisia, 19–22 December 2011. [Google Scholar] [CrossRef]
- Msadaa, S.; Lahbib, Y.; Mami, A. A SoPC FPGA Implementing of an Enhanced Parallel CFAR Architecture. In Proceedings of the 2022 IEEE 9th International Conference on Sciences of Electronics, Technologies of Information and Telecommunications (SETIT), Hammamet, Tunisia, 28–30 May 2022. [Google Scholar] [CrossRef]
- Bharti, V.K.; Patel, V. Realization of real time adaptive CFAR processor for homing application in marine environment. In Proceedings of the 2018 Conference on Signal Processing And Communication Engineering Systems (SPACES), Vijayawada, India, 4–5 January 2018. [Google Scholar] [CrossRef]
- Damnjanović, V.D.; Petrović, M.L.; Milovanović, V.M. On Hardware Implementations of Two-Dimensional Fast Fourier Transform for Radar Signal Processing. In Proceedings of the IEEE EUROCON 2023–20th International Conference on Smart Technologies, Torino, Italy, 6–8 July 2023. [Google Scholar] [CrossRef]
- Hirschmugl, M.; Rock, J.; Meissner, P.; Pernkopf, F. Fast and resource-efficient CNNs for Radar Interference Mitigation on Embedded Hardware. In Proceedings of the 2022 19th European Radar Conference (EuRAD), Milan, Italy, 28–30 September 2022. [Google Scholar] [CrossRef]
- Liu, H.; Niar, S.; El-Hillali, Y.; Rivenq, A. Embedded architecture with hardware accelerator for target recognition in driver assistance system. ACM SIGARCH Comput. Archit. News 2011, 39, 56–59. [Google Scholar] [CrossRef]
- Petrović, N.; Petrović, M.; Milovanović, V. Radar Signal Processing Architecture for Early Detection of Automotive Obstacles. Electronics 2023, 12, 1826. [Google Scholar] [CrossRef]
- Zhai, J.; Li, B.; Lv, S.; Zhou, Q. FPGA-Based Vehicle Detection and Tracking Accelerator. Sensors 2023, 23, 2208. [Google Scholar] [CrossRef] [PubMed]
- Meinl, F.; Kunert, M.; Blume, H. Hardware acceleration of Maximum-Likelihood angle estimation for automotive MIMO radars. In Proceedings of the 2016 Conference on Design and Architectures for Signal and Image Processing (DASIP), Rennes, France, 12–14 October 2016. [Google Scholar] [CrossRef]
- Cunha, L.; Roriz, R.; Pinto, S.; Gomes, T. Hardware-Accelerated Data Decoding and Reconstruction for Automotive LiDAR Sensors. IEEE Trans. Veh. Technol. 2023, 72, 4267–4276. [Google Scholar] [CrossRef]
- Silva, J.; Pereira, P.; Machado, R.; Névoa, R.; Melo-Pinto, P.; Fernandes, D. Customizable FPGA-Based Hardware Accelerator for Standard Convolution Processes Empowered with Quantization Applied to LiDAR Data. Sensors 2022, 22, 2184. [Google Scholar] [CrossRef]
- Bai, L.; Lyu, Y.; Xu, X.; Huang, X. PointNet on FPGA for Real-Time LiDAR Point Cloud Processing. In Proceedings of the 2020 IEEE International Symposium on Circuits and Systems (ISCAS), Seville, Spain, 12–14 October 2020. [Google Scholar] [CrossRef]
- Roriz, R.; Campos, A.; Pinto, S.; Gomes, T. DIOR: A Hardware-Assisted Weather Denoising Solution for LiDAR Point Clouds. IEEE Sens. J. 2022, 22, 1621–1628. [Google Scholar] [CrossRef]
- Bernardi, A.; Brilli, G.; Capotondi, A.; Marongiu, A.; Burgio, P. An FPGA Overlay for Efficient Real-Time Localization in 1/10th Scale Autonomous Vehicles. In Proceedings of the 2022 Design, Automation & Test in Europe Conference & Exhibition (DATE), Antwerp, Belgium, 14–23 March 2022. [Google Scholar] [CrossRef]
- Venugopal, V.; Kannan, S. Accelerating real-time LiDAR data processing using GPUs. In Proceedings of the 2013 IEEE 56th International Midwest Symposium on Circuits and Systems (MWSCAS), Columbus, OH, USA, 4–7 August 2013. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| ADAS Level | Automation Level |
|---|---|
| Level 0 | No Automation |
| Level 1 | Driver Assistance |
| Level 2 | Semi-Automated |
| Level 3 | Conditional Automation |
| Level 4 | High Automation |
| Level 5 | Full Automation |
| Implemented Tasks | Main Features | Implementation | [MHz] | Processing Time | |
|---|---|---|---|---|---|
| [80] | Waveform generation, FFT computation, data compression, target detection (OS-CFAR) | Single-chip solution with RF front-end, DSP, MCU and HW accelerators | 45 nm CMOS | 360 | |
| [81] | Analog-to-digital converter, RISC-V general purpose core, FIR filter, polyphase filter, FFT | Single-chip solution for radar processing based on a RISC-V system | 16 nm FinFET | 410 | |
| [82] | FIR filtering, FFT, OS-CFAR | Complete radar processing flow | (Virtex7 485T FPGA) | ||
| [83] | Complete object detection | Hardware acceleration of 2D-FFT, detection and angle estimation | Integrate SoC available by Texas Instrument (AM273x SoC) | 200 | |
| [84] | Full target detection processing: 3D-FFT, CA-CFAR | Range, Doppler and azimuth processing, integrated with peak detection | Around 36,000 (XA7A100T FPGA) | 200 | ms |
| Implemented Tasks | Main Features | Implementation | [MHz] | Processing Time | |
|---|---|---|---|---|---|
| [85] | 2D CA-CFAR | Special purpose hardware, computation and hardware complexity reduction avoiding repeated calculations | 2816 LUTs (xc7a100tcsg324-1 FPGA) | ||
| [86] | 2D ML-CFAR | Many configurable parameters, such as reference window size and protection window size | 8000 LUTs (xc6vlx240t FPGA) | 220 | |
| [87] | custom-CFAR | Proposal of a new CFAR algorithm, efficient sorting architecture | 8260 LUTs (Altera Stratix II) | 0.6 s | |
| [89] | B-ACOSD CFAR | Efficient HW/SW partition of the CFAR algorithm on an Altera-based system | 4723 LUTs (Altera Stratix IV) | 250 | 0.45 s |
| [90] | ACOSD-CFAR | Efficient HW/SW partition of the CFAR algorithm on an Xilinx-based system | 10,441 LUTs (Zedboard Zynq 7000) | 148 | 0.24 s |
| [88] | Peak detector generator | Seven types of different CFAR algorithms available | From 630 to 7453 LUTs depending on the selected parameters (Xilinx Spartan-7) | 100 |
| Implemented Tasks | Main Features | Implementation | [MHz] | Processing Time | |
|---|---|---|---|---|---|
| [92] | Range-Doppler processing, specialized range-angle processing, SDRAM controller for radar data processing | Parametrized hardware generators for 2D-FFT, range-Doppler and range-angle | From around 1000 to 60,000 LUTs, depending on the selected parameters | real time processing | |
| [93] | Interference mitigation | Quantized CNN model working with range-Doppler matrix | of available LUTs (Xilinx Zynq 7000) | 100 | 32.8–44.4 ms |
| [97] | Direction of arrival | CORDIC based maximum-likelihood direction of arrival estimation, many configuration parameters available | From 900 to 14,500 LUTs depending on the selected parameters (XC7VX485T Xilinx Virtex-7) | 200 | |
| [94] | Early obstacle detection and recognition | Early warning and collision avoidance system | 10,688 LUTs (Xilinx Virtex 6) | 15.86 ms | |
| [95] | Early obstacle detection | Configurable early detection system | 27,808 LUTs (Nexys Video Artix 7) | 200 | 41.72 s |
| [96] | Obstacle detection and tracking | Deep-learning-based detection and tracking | Around 38,000 LUTs (Xilinx Zynq 7000) | 230 | 10.9 ms per frame |
| Implemented Tasks | Main Features | Implementation | |
|---|---|---|---|
| [100] | Point-cloud segmentation and classification | Implements the PointNet network on an FPGA platform | 19,530 LUTs (Xilinx Zynq UltraScale+) |
| [99] | Convolutions, rectified linear unit (ReLU), padding and max pooling | General purpose CNN accelerator | 10,832 LUTs (Zybo Z7:Zynq 7000) |
| [102] | Real-time localization | Hardware acceleration of ray marching for particle filter | 186,430 LUTs (Ultra96 XCU102) |
| Radar | Lidar | |
|---|---|---|
| Transmitted signal | RF signal | laser signal |
| Signal source | mm-wave antenna | laser |
| Signal receiver | mm-wave antenna | photodiode |
| Output | 4D array (Range Doppler DoA Elevation) | 3D point-cloud |
| Range | long | short |
| Range resolution | low | high |
| Angular resolution | low | high |
| Radial velocity resolution | high | low |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Giuffrida, L.; Masera, G.; Martina, M. A Survey of Automotive Radar and Lidar Signal Processing and Architectures. Chips 2023, 2, 243-261. https://doi.org/10.3390/chips2040015
Giuffrida L, Masera G, Martina M. A Survey of Automotive Radar and Lidar Signal Processing and Architectures. Chips. 2023; 2(4):243-261. https://doi.org/10.3390/chips2040015
Chicago/Turabian StyleGiuffrida, Luigi, Guido Masera, and Maurizio Martina. 2023. "A Survey of Automotive Radar and Lidar Signal Processing and Architectures" Chips 2, no. 4: 243-261. https://doi.org/10.3390/chips2040015
APA StyleGiuffrida, L., Masera, G., & Martina, M. (2023). A Survey of Automotive Radar and Lidar Signal Processing and Architectures. Chips, 2(4), 243-261. https://doi.org/10.3390/chips2040015