1. Introduction
According to the revised report of the 2017 world population prospects released by the United Nations, current trends in the world’s aging population will continue to grow over the next 30 years. The world’s elderly population is expected to triple to 2.1 billion by 2050 and will result in a considerable demand for medical and health care services, which has become a major social problem [
1]. Undoubtedly, service robots can relieve the shortage of medical personnel, improve the quality of life for the elderly and the disabled, and play a positive role in the stable development of China [
2]. Currently, various degenerative diseases and the chronic pain which often accompanies them have become major ailments in older populations, among which lumbocrural pain is the most common and severe.
Owing to the long history of Chinese massage therapy, traditional Chinese medicinal massages are effective and efficient tools to relieve and treat most kinds of chronic pain. According to natural healing theory, Chinese medicinal massages are a type of health care massage for chronic pain that was developed for more than 2000 years ago. It advocates for natural massage as a means to strengthen the immune system of the human body and guide the natural rehabilitation of patients. However, major clinical treatments at hospitals are still being performed through the use of manual labor, generally leading to a considerable waste of resources. Nowadays, various massage practitioners are currently marketed for patients and hospitals. However, a massage therapist’s singular approach can only provide relaxation and alleviate fatigue for patients, which hardly achieves the aim of comprehensive treatment.
A summary of massage processes and techniques in clinical applications are presented in this paper. In the process of promoting massage, the key influences of massage cannot be accurately and quantitatively described using human language, including massage position, strength, manipulation, and a patient’s psychological adjustment, which will therefore affect the promotion of massage techniques in hospital settings. Moreover, a humanoid robotic arm massage system can imitate the actions of a masseuse which causes no fatigue and can effectively alleviate the lack of massage staff.
Many companies and institutions have conducted relevant research on robotic massage systems. Massage service equipment has been developed which has expanded the scope of care and treatment of massage [
3]. Force control for path planning of induction-based massage robots was investigated and analyzed [
4]. Moreover, a three degrees of freedom (DOFs) massaging robot was designed and investigated for patients [
5]. Chinese traditional massage mainly emphasizes the stimulation of manipulation and changing power on a series of meridians which improves the ability of the immune system and achieves the purpose of disease prevention and treatment. There are several works which have extensively studied the finger and joints of the human hand for use in a multi-finger massage robot [
6,
7,
8]. Existing massage devices and robots are generally designed for only certain massage techniques and can only realize one or two different massage patterns for patients. Subsequently, a novel PUMA562 robot platform was developed and designed for people [
9]. Recently, some classical massage robots have been developed, such as the WAO-1 [
10,
11], a humanoid massage robot [
12], a four-finger human hand robot [
13], and a robotic hand [
14]. To relieve lumbago and leg pain for middle/old-aged patients suffering from degenerative diseases, a Chinese-style massage robot was designed and investigated on the basis of Chinese medicinal massage theory [
15,
16,
17]. The massage force can be actively controlled through force sensors; however, a personalized massage cannot be implemented for patients. In addition, Hu et al. [
18] developed and analyzed a Chinese massage robot which featured an arm with four DOFs. This robot had the end of its arm in a series with three degrees of freedom, and a parallel wrist with three degrees of freedom served as the human hand which massaged. Additionally, two fingers were ineffective and the other fingers could undertake actions such as clicking, finger kneading, pinching, and rolling. Therefore, the five traditional kinds of actions which comprise Chinese medicinal massage techniques could be performed [
19]. Furthermore, an increasing number of researchers are studying humanoid robot arms from the perspective of service robots [
20,
21,
22,
23,
24,
25]. Therefore, Chinese traditional massage devices and massage robots can be adjusted passively by the masseur or the massage object, which makes it difficult to ensure the accuracy and reliability of the massage position.
In recent years, much attention has been paid to massage equipment and massage robotic systems, which can be applied to many fields such as health care and rehabilitation therapy. The technical and functional characteristics of massage robot arms are as follows: (1) a relatively high degree of humanity and (2) an ability for remarkably complex movements and accurate grasp of massage force. In particular, a humanoid massage robot arm is rarely focused on configuration for realizing various massage techniques and precise recognition of a designated massage position. Furthermore, during the performance estimation of a humanoid Chinese medicinal massage robotic arm system, many factors including the weight of the arm and massage force size, direction, location, acupuncture point, and frequency should be taken into account. Therefore, a robotic arm with rigidity, high transmission accuracy, and anthropomorphic degree is highly desirable for the patients.
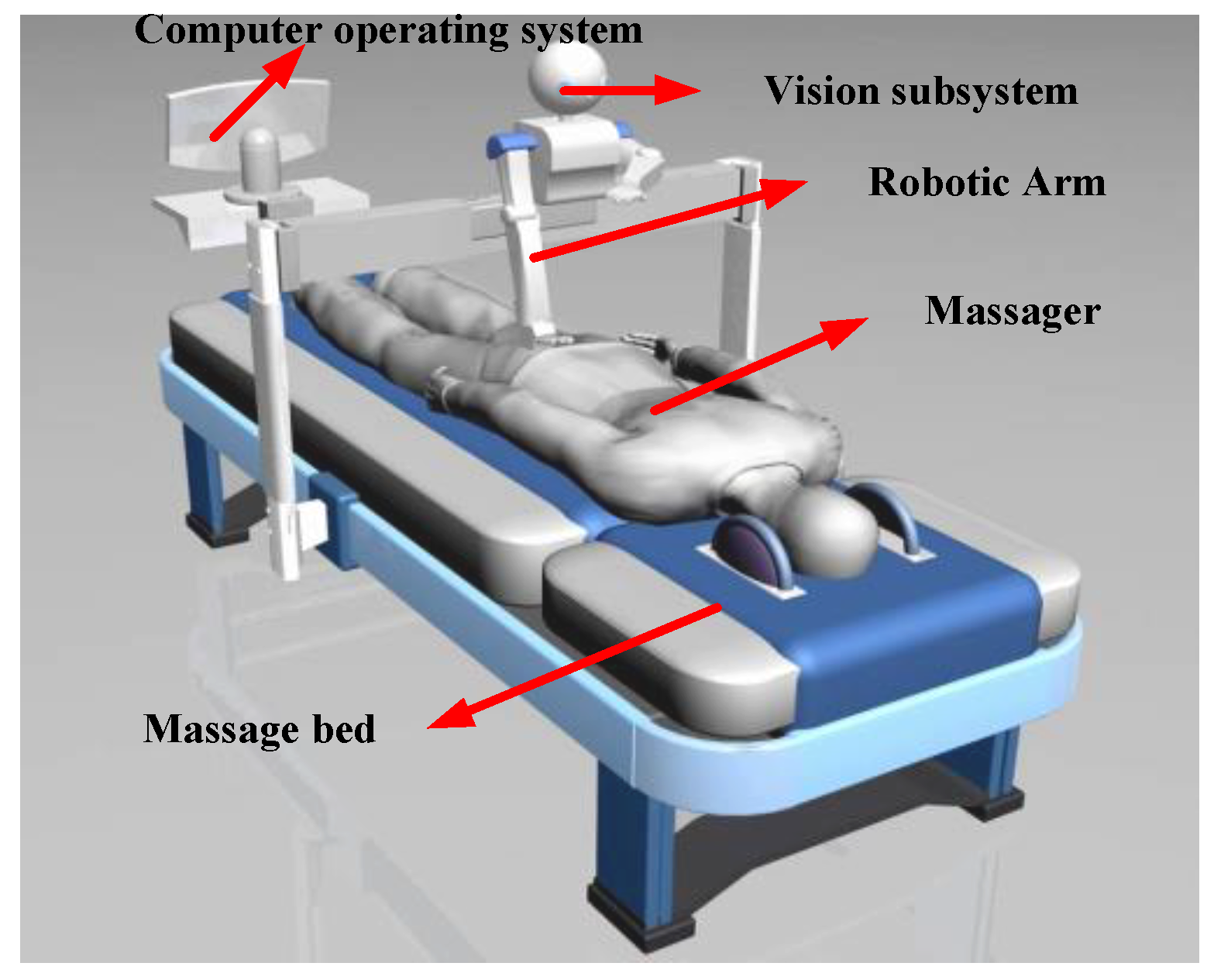
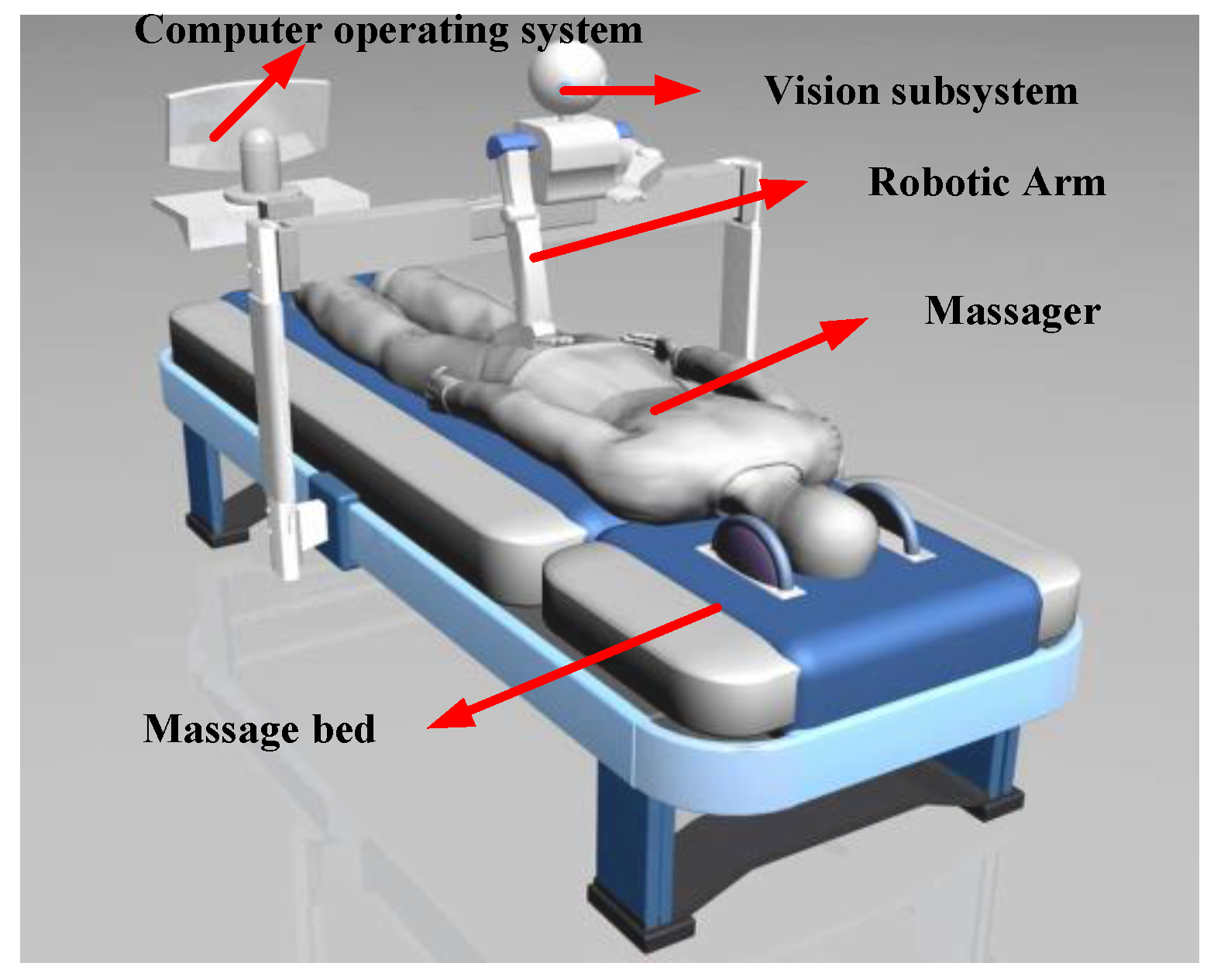
To address the abovementioned shortage of medical personnel and improve the quality of life of the elderly and the disabled, a humanoid robot massage arm was designed on the basis of human arm massage theory. In this paper, a humanoid massage robot arm was mainly used in the field of traditional Chinese medicinal massage to realize massage of the lumbar spine and back. According to the task function and control requirements, the humanoid massage robot arms were designed with the joint as the module based on the characteristics of a human skeleton and using massage theory according to traditional Chinese medicine, contrary to previous humanoid massage robot arms. The joints of the humanoid massage robot arm were connected together to realize the basic functions of a human-like arm by taking advantage of the working space and good flexibility of the serial robot. Binocular vision positioning technology was utilized to determine the precise massage position. Furthermore, a three-finger, dexterous massage hand and parallel robot massage were used to reproduce the techniques of experts. Moreover, the movement of the robot arm drove the dexterous hand and the parallel robot massage terminal to the designated position. In addition, the humanoid massage robot massaged the patient through the massage terminal at the front of the arm and the massage hand. Therefore, it was able to achieve the massage techniques (which can be considered as press, knead, pinch, roll, vibration) on the human lumbar spine and the back of the palm which stimulates meridian points and improves the ability of the immune system. Therefore, the natural posture of the arm of the humanoid Chinese medicinal massage robot is an important indicator of a massage robotic system [
26]. Four degrees of freedom in a humanoid Chinese medicinal massage robotic arm (through serial structure in a series with the elbow, forearm, and wrist joints) can easily achieve this action with the arm.
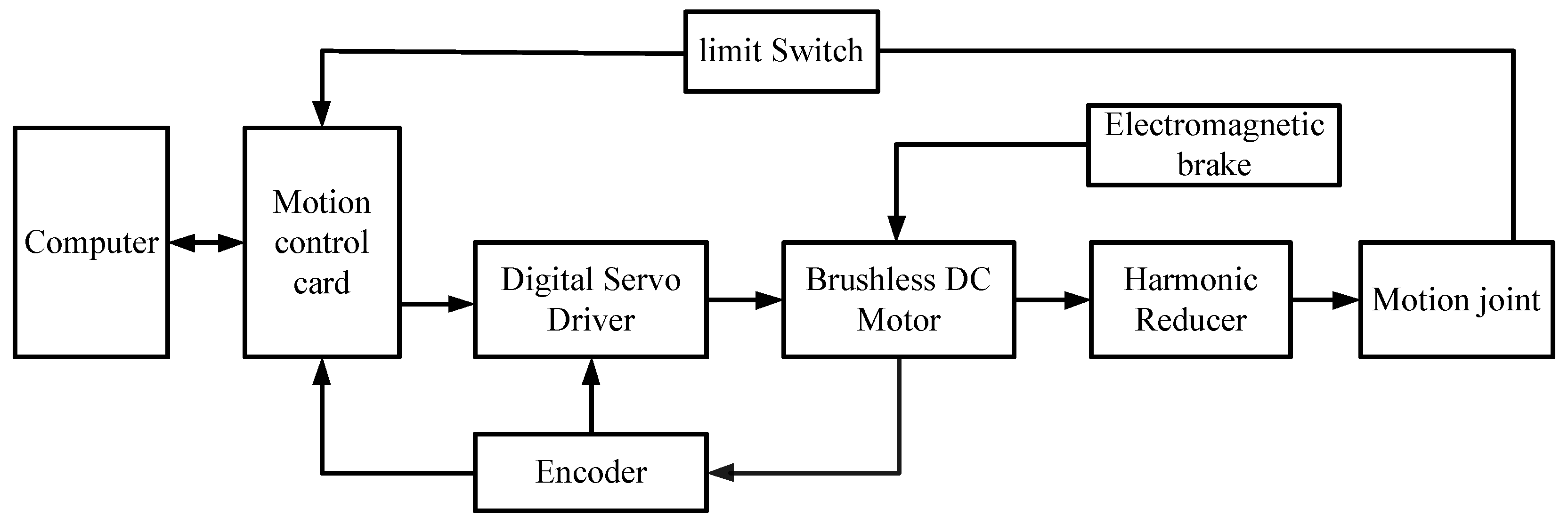
The mechanical structure of the humanoid massage robot arm was developed, investigated, and analyzed through a modular design concept, which was composed of a shoulder joint, elbow rotatory joint, wrist swing, and wrist rotatory joint. First, the motor of shoulder joint was installed perpendicular to the axis of the arm, which increased the motion space of the arm and provided convenience for replacing the motor. Second, a U-like structure was adopted in the shoulder bracket to improve the bearing capacity of the arm. Third, the motor (which was installed in the arm) was coincident with the center line of the arm to improve the transmission precision and reduce the diameter of each joint. Therefore, the characteristics of the humanoid massage robot arm were a compact structure and anthropomorphism, as well as an assembly which reduced the accumulated error of the arm. Bevel gear was utilized in the swinging joint, which improved the stability of the humanoid massage robot arm. A servo motor was used to drive each joint of the humanoid massage robot arm, and a reducer and brake were installed to ensure overload protection and emergency braking.
The strength and stiffness of the humanoid massage robot arm were analyzed to verify that the mechanical mechanism satisfied the design requirements of the mechanics. The kinematic simulation of the humanoid massage robot arm was illustrated and carried out through the establishment of a virtual prototype model, which provided a reference for the improvement of the humanoid massage robot arm.
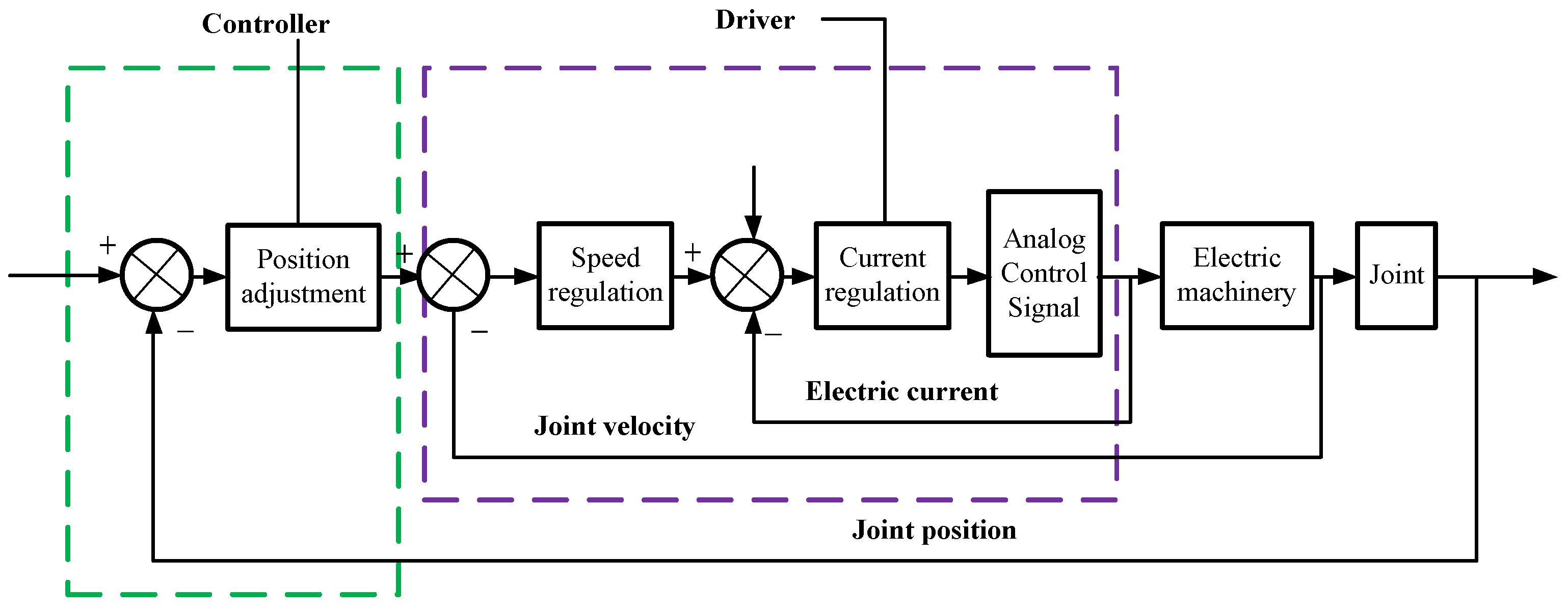
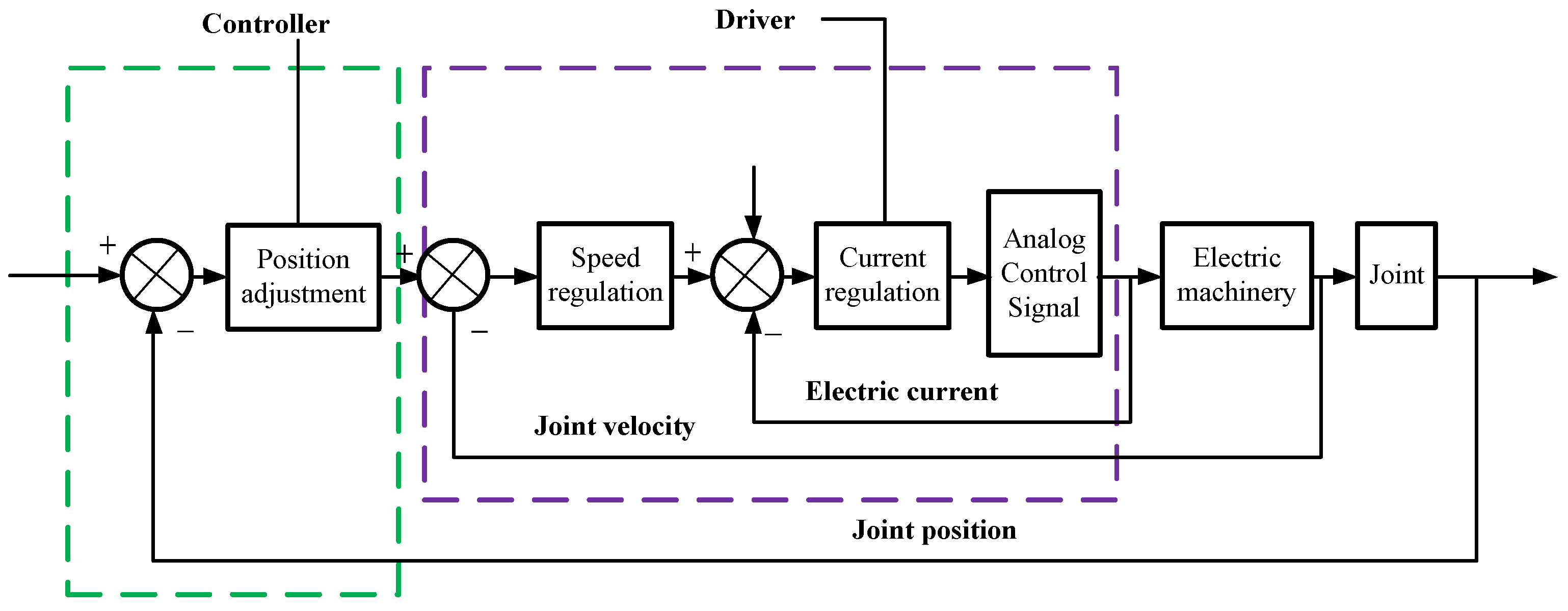
A three-loop servo system was established, investigated, and verified for the humanoid massage robot arm. The smooth operation and trajectory positioning of the humanoid massage robot arm were realized by adjusting the PID (Proportion-Integral-Derivative) controller of the humanoid massage robot arm to adjust the parameters in combination with the PMAC (Programmable Multi-axis Controller) motion controller.
4. Modular Design of the Humanoid Robotic Arm Massage System
To reasonably allocate dimensions and ensure the coordination of dimensions and smooth progress, it was necessary to check whether the parts touched or blocked each other, which may result in the failure of normal installation. In addition, it was necessary to determine whether the positioning and assembly relationship among the parts was reasonable and whether the overall structure was aesthetically pleasing for the humanoid massage robot arm. The 3D solid modelling of the humanoid massage robot arm was carried out and investigated based on CATIA 3D modelling software, which realized parametric modelling and virtual assembly of the humanoid massage robot arm from top to bottom. It established an accurate analysis model for finite element analysis, which improved the speed and accuracy of the design requirements.
On the basis of the characteristics of the human arm and Chinese massage theory, we considered the driving torque, moving speed, weight and size of the arm, direction, position, acupuncture point, and frequency of the human body. According to the design methods, we selected the appropriate combination of modules into the arm, namely, the shoulder, elbow rotation, wrist pitch, and wrist rotation joints. The modular articulation unit of the arm consisted of a motor, a reducer, a feedback device, and other accessories. The joints exhibited relative independence, and all joints worked together to achieve the basic functions of the humanoid massage robotic arm. The arm of the joint module shell mainly supported the connection motor, reducer, bearing, and other internal parts, which played a protective role. The shell adopted was an aviation aluminum alloy with a cylindrical shape, sufficient strength and rigidity, an anodized outer surface, and good appearance. The modules were relatively independent of each other. The various modules could be connected together to achieve the function of a humanoid massage robotic arm. Therefore, the connection of the configuration of the robot arm played an important role in imitation. The quality of the connector also affected the weight of the entire arm of the massage robot. Thus, mechanical strength should also be considered for humanoid robotic arm massage systems. Owing to the low density, high strength, and good plasticity, aviation aluminum alloy was utilized as the connection material. The resulting modular joints are shown in
Figure 8.
The end-effector of the humanoid massage robot arm mainly consisted of a three-finger massage dexterous hand for the manipulation of kneading and a miniaturized parallel robot massage terminal for the manipulation of pressing, kneading, vibration, and rolling. The massage marker points needed to wear vests and were prone on the massage bed through the binocular visual positioning sensors before implementation of massage. The movement of the humanoid massage robot arm drove the dexterous hand massage and parallel robot terminal to the location and, combined with the arm front terminal, massaged the hand of the human body, as shown in
Figure 9.
6. Simulations and Experiments
6.1. Statistical Analysis of the Humanoid Robotic Arm Massage System
The ANSYS software is a general finite element analysis software. To verify whether the design of the robot arm strength and stiffness meet the design requirements, the humanoid massage robot arm was built via CATIA 3D model with the data interface built into the ANSYS [
29,
30]. A stress diagram and displacement nephogram can be obtained, which evaluates the strength and stiffness of the parts and components of the whole arm structure optimization, and achieves miniaturization, weight reduction, and anthropomorphism of the massage robot arm.
A humanoid massage robot arm has a series structure, where the arm shell, the rotating shaft, and the bearing may be deformed. The rigidity of the arm indicates the end-effector, which can overcome the deformation force under the external force. The strength and stiffness of the humanoid massage robot arm are the main factors which affect the dynamic characteristics and position accuracy under loaded conditions. Therefore, it is a key step in designing a humanoid massage robot arm. The size of the external load directly determines the size of the terminal deformation, which affects the positioning accuracy of the terminal. In a certain range of terminal variation, the static stiffness can be controlled by the terminal output force.
During the movement of the humanoid massage robot arm, there will be a state of maximum force and deformation, that is, the arms of the robot are in a straight line. At this time, the gravity arm reaches the maximum value, so each arm of the humanoid massage robot arm is subject to the maximum state of force. In this paper, the state of maximum force and deformation were selected and investigated for static analysis. Both the upper and lower arms were fixed at one end, and the other end applied a reaction force and bending moment when the constraints were added in the design of the humanoid massage robot arm. Thereby, we could obtain the deformation and stress of each component in the most dangerous and deformed state. Owing to the load type and the structural characteristics and analysis requirements of the built entity, the size of the mesh division should be less than or equal to the minimum wall thickness of the entity. Finally, we adopted a free meshing method for the body of the humanoid massage robot arm. The following were the specific mesh divisions: the boom bracket was divided into 8223 units and 37,357 nodes; the shoulder pitch bracket was divided into 5127 units and 21,767 nodes; the number of units obtained by the elbow pitch bracket was 4772, and the number of nodes was 18,155. The elbow rotation bracket was divided into 4462 units and 15,076 nodes.
The finite element analysis of the key components of the shoulder joint and the elbow joint was completed by adding a load, and the torque was applied by establishing a node at the center of the component, which obtained a highly accurate simulation result. The stress and deformation cloud diagrams of the shoulder and elbow joint structures are shown in
Figure 13 and
Figure 14.
The stress and deformation diagrams show that the structural design was unreasonable and facilitated the determination of corresponding improvements. The key components on the arm of the humanoid massage robot were analyzed in the actual analysis through the ANSYS software. The design of each part ensured rigidity to minimize weight. Therefore, the designed arm was also optimized by using dynamics and finite element analysis. The small deformation area of the arm was improved, resulting in a small, lightweight, and anthropomorphic arm.
6.2. Kinematic Simulation in ADAMS Environment
To view the actual operation of the humanoid massage robot arm, the kinematics analysis was carried out and investigated in the design process. The model built in CATIA software was imported into ADAMS software. The motion curves were observed to satisfy the design requirements. Kinematic analysis was a critical basis of the mechanical design, performance analysis, and control of the humanoid massage robot. The analysis also provided a reference for the improvement of the arm design and adjusted the transmission mechanism of the human machine. The 3D modeling and interference analysis of the arm structure of the humanoid massage robot were realized through CATIA software. Subsequently, using ADAMS software, the mechanical dynamics model was simulated by the SimDesigner interface to achieve the seamless connection between the patient and massage arm robot. The simulation system can be built using various joints of inertia, rotation speed, torque, and force conditions, as well as other parameters. The motor and reducer models were appropriately selected for the massage arm robot model. The driving function of each joint can be described as follows: the pitch joint function of upper arm was −90d × sin (45 × time), the terminal time was 25 s, and the step was 200. The rotation joint function of elbow was 180d × sin (time), the terminal time was 25 s, and the step was 200. The pitch function of the wrist was 90d × sin (time), the terminal time was 25 s, and the step was 200.
Figure 15 illustrates the curves of the different joints. As can be observed, the motion of each arm was smooth, realistic, and in accordance with the experimental requirements, verifying the feasibility of the constructed humanoid massage robot arm system theoretically. In particular, the design of the physical prototype was based on the requirements of the maximum torque of each joint. It thereby guarantees the reliability of the design and provides the reference for the design, optimization, and motion control of the humanoid robotic arm massage system.
In this paper, the periodic motion of the single join was analyzed for the humanoid massage robot arm, and then the curves of the pitching joint, elbow joint, and wrist joint were obtained as shown in
Figure 16.
6.3. Experimental Verification
6.3.1. Experiments on Repeated Positioning Accuracy
The repeatability of positioning accuracy was an important parameter for the humanoid massage arm robot. The parameters of the humanoid massage arm robot were measured to verify the characteristics of joint motions under a full load. Owing to human trajectories, the Chinese medicinal massage arm robot could utilize 10 kg as a full load at the end of the humanoid massage arm robot. It was required to return to the zero point of the x-axis and proceed from this point to a specified position. The actual movement distance was measured using a Vernier caliper. The positional accuracy of the humanoid Chinese massage robot arm was recorded and calculated during the process of rehabilitation training through repetitive experiments.
More specifically, PMAC PEWIN32 software was utilized to return the
x-axis back to zero. When it reached zero, the position was marked. The forward command of the
x-axis was entered, and the command arm of the humanoid massage robot arm moved forward by 10 mm. A Vernier caliper with the precision of 0.02 mm was utilized to measure the distance of the relative zero-mark position of the human body. The
x-axis returned back to the zero instructions again. At the same time, the forward command of the
x-axis was adopted once more, and the command arm of the Chinese medicinal massage robot moved forward by 100 mm. The distance of the relative zero-mark position of the humanoid massage robot was measured upon the completion of movement. This experiment was repeated several times, and the data are tabulated in
Table 3. Remarkably, as for the
x-axis, the maximum error of positional accuracy was less than 0.1 mm, which satisfied the requirement of precision for the improved movement of the Chinese medicinal humanoid massage robot arm.
6.3.2. Precision Experiments on Massage Strength
The control strength of massage force, which is a constant of the arm, was controlled by the force control of the arm-kneading method. The control precision of massage force was tested during the process of rehabilitation training. A palm rub massage force control experiment was performed (rehabilitation removed) to create a massage robot as a platform. In accordance with the requirements of the palm kneading movement, palm massage operations in the x- and y-axes were carried out to realize massage trajectory, the x-axis was utilized to exert massage force, and the massage contact points were used for the end of the parallel massage head. The force signal was amplified and put into the corresponding AD channel of the PMAC motion control card. The card then regulated the massage force according to the skin model-based massage force control algorithm program.
Owing to the designed requirements, the control accuracy of force should be less than 5% for the improved massage robot, i.e., the robot’s massage force should not exceed 50 N. Hence, the resolution ratio of electronic measuring equipment should be less than 0.005 kg and the measuring range should be 20 kg, as shown in
Figure 17.
The experimental process was referred to an object to be massaged and was utilized to display the actual massage force. Prior to the test, the parallel massage head mechanism was perpendicular to the electronic scale and displayed no contact with the electronic scale. The expected force of the palm rubbing method was manually entered to stabilize after the robot movement. The actual strength was recorded, and the desired force was altered. Furthermore, the measurement was performed again. Note that the expected force ranged from 1 kg to 4 kg during the total of seven experiments. The experimental data are shown in
Table 4. It was not difficult to calculate a force error of less than 5%, satisfying the required strength for an improved force of the massage robot.
6.4. Simulation Results of Massage Robot Arm for PID Controller
To verify the feasibility and efficiency of the PID controller, the massage robot system can be seen in
Figure 18. The angular velocity and angular acceleration response curve of the massage robot arm boom pitch joint are shown in
Figure 19a. The angular acceleration curve of the massage robot arm is in blue, and the angular velocity curve of the massage robot arm is in red.
It can be seen from
Figure 16b,c that the massage robot arm ran smoothly. In the designed trajectory, it could operate according to the expected trajectory and the temporary overshoot amount was small in the step signal. In addition, the response time was short and the PID in the position controller was used. The effect was obvious when the parameters were adjusted to the appropriate parameter values.




















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}