Featured Application
The wearable and infrastructure presented in this work has proven to be a valuable and flexible tool for real-time extensive livestock tracking and monitoring with regulatory compliance. Main features are online and offline monitoring and data logging; adaptative dual radio (FSK and LoRaWAN) for best energy/bandwidth/range balance; adaptative movement data streaming modes with vector quantization compression method; and years of battery life.
Abstract
Extensive unsupervised livestock farming is a habitual technique in many places around the globe. Animal release can be done for months, in large areas and with different species packing and behaving very differently. Nevertheless, the farmer’s needs are similar: where livestock is (and where has been) and how healthy they are. The geographical areas involved usually have difficult access with harsh orography and lack of communications infrastructure. This paper presents the design of a solution for extensive livestock monitoring in these areas. Our proposal is based in a wearable equipped with inertial sensors, global positioning system and wireless communications; and a Low-Power Wide Area Network infrastructure that can run with and without internet connection. Using adaptive analysis and data compression, we provide real-time monitoring and logging of cattle’s position and activities. Hardware and firmware design achieve very low energy consumption allowing months of battery life. We have thoroughly tested the devices in different laboratory setups and evaluated the system performance in real scenarios in the mountains and in the forest.
1. Introduction
Extensive livestock farming is a typical technique in many places around the world. It occurs on 25% of global land surface and supports around 200 million subsistence pastoral households [1]. In Africa, 40% of the land is dedicated to extensive pastoralism [2]. Many habitats important for biodiversity conservation have been created by and are still inherently linked to extensive livestock production, in particular grazing. For instance, extensive grazing is considered vital for maintaining many biodiversity-rich habitats in Europe. It is suggested as optimum management of de-intensified grassland to enhance biodiversity [3]. Extensive grazing was reported to positively influence sward species composition and structure which, in turn, provided favourable conditions for colonizing fauna.
Furthermore, extensive livestock and the related grazing is also critical for maintaining many of Europe’s cultural landscapes and sustaining rural communities. Over the centuries, pastoralism, and transhumance (seasonal movement of livestock between grazing areas) created a wide variety of specific cultural landscapes. The largest remaining extensive pastoral systems on permanent wood pastures in Europe are Dehesa in Spain and Montado in Portugal [4]. Grazing and transhumance are of particular importance for the preservation of open landscapes in the European mountains. In addition, societal concern over the welfare of farm animals has recently increased and a growing number of citizens in many countries think that it is important to protect the welfare of farm animals [5]; extensive livestock is believed to be advantageous in terms of animal welfare.
Extensive livestock farming is, in most cases in Europe, unsupervised. Cattle, mainly bovine, are free in large enclosed remote areas for most of the year. Although shepherds do control the cattle periodically, whenever the weather allows it, animals are collected only for one month to take a veterinary control. This implies moving to the area where the animals are living and looking for them. We are talking about hundreds of hectares, in most cases without any kind of road. Consequently, it is usual that shepherds spend most of their time walking through the field while they are looking for the animals. In order to assist them in this task, some Global Navigation Satellite System (GNSS)-based solutions have been developed for controlling the movements of the animals and reporting them to the farmers. For instance, Pérez et al. [6] use a GPRS-based system for monitoring lidia cattle, meanwhile Laria et al. [7] use a SigFox-based one.
In Europe, this type of livestock farming is usually restricted to remote areas with low population density. This makes these areas less interesting for telecommunication service provider (TSP), to offer high wand-wind services: high investment for small return (see Figure 1 and Figure 2). Even for technologies developed for the improvement of Internet of Things (IoT) cannot offer coverage for all these remote areas (see Figure 2).
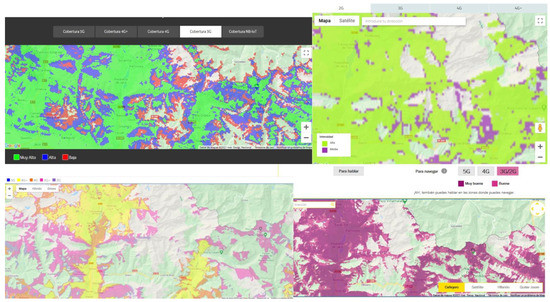
Figure 1.
3G coverage provided by the main telecommunication service provider (TSP) in the Pyrenees area in Spain (source websites from Movistar, Orange, Vodafone and MasMovil, December 2020).
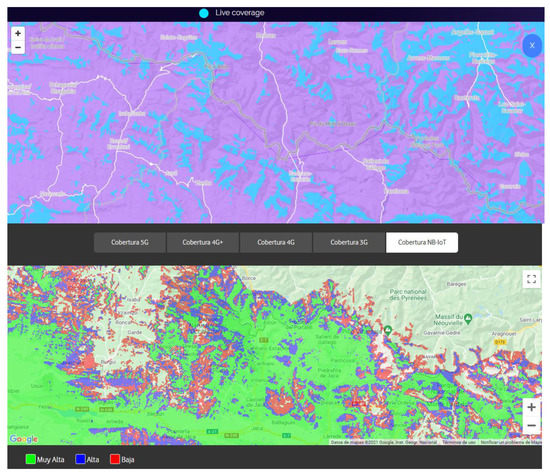
Figure 2.
Coverage provided by SigFox (up) and NB-IoT by Vodafone (down, and probably the best one in Spain) in the Pyrenees area in Spain (source websites from SigFox and Vodafone, December 2020).
There are several other alternatives to cellular networks for IoT monitoring. These can be mesh networks, where link quality indicators could be used to locate animals without GNSS [8]. This kind of deployment is heavily dependent of the gateway which usually becomes the bottleneck and, depending on the orography, requires a router infrastructure that needs considerable amount of energy [9]. There are times where the link between the wireless sensor network (WSN) and the internet is a Wi-Fi transceiver, which is meant to increase the range in zones without GPRS coverage [10].
Low-Power Wide Area Networks (LPWAN) are also suitable options, bringing together the low-power qualities of WSN and long-range capacities of cellular networks. There are novel modulations such as LoRa that can be used on mesh topologies to extend range, although it is usually used in star topology. Given the benefits such as long range, low-power and cost savings, LoRa is ideal for cattle monitoring [11,12,13].
Another appealing alternative is the use of UAVs, which is an emerging application in the field of precision agriculture [14,15,16]. Specific usage of UAVs for cattle monitoring is described in [17,18,19,20] which relay on image processing techniques for identify animals and account for them. However, that approach have some limitations when we are concerned about tracking specific individuals (a shepherd would be interested in locating his animals only) and does not allow continuous tracking as GNSS solutions do. Combined usage of UAVs and GNSS is also proposed in [21], which consider drones for easing the retrieve of the tracking information acquired by GPS collars worn by the animals. Nevertheless, a number of technical and administrative issues arise that still possess some difficulties for using UAVs in extensive cattle monitoring, such as the cost or the need of specialist operators (it is required mid/high-size UAVs for covering big extensions), which may also require a flying license and special permission in some countries [22].
Besides localization tracking of the animals using GNSS, registering their status and activities can be of interest to shepherds [23]. Activity detection can be performed with different strategies such as radio frequency identification (RFID) to infer cattle drinking behavior and water intake by detecting proximity to specific places [24]. Using temperature [25] and other biosensors [26] can help to detect a fever state and to assert animal well-being. The most common are inertial sensors based on accelerometers and gyroscopes that are able to identify animal activities such as resting, walking, mating or feeding among others [27,28].
Using inertial data to extract activities is a very powerful, cheap, energy-efficient and, consequently, broadly adopted strategy. Nevertheless, inertial sensors cannot be directly used, due to the high throughput required: a 12-bit 3-axis accelerometer sampling at 10 Hz generates more than 1.25 Mb of data every hour. Sending this amount of data through LPWAN is too costly in both economic and energetic terms, sometimes violates regional restrictions (e.g., LoRaWAN) or it is just technically impossible (e.g., Sigfox). Thus, raw data needs to be processed in order to extract the most important features, which also helps saving and sending way less data than generated.
There are two main strategies that can be applied. Custom data processing techniques to specifically detect the required activities performed by animals [29] and humans [30] is a trending research topic. It is also possible to use data compression strategies to reduce the amount of information to be sent and then decompress and process it in the cloud. Usual techniques for accomplishing data compression are Principal Component Analysis (PCA) [31,32,33,34], Sequential Forward Selection (SFS) [35], Random Subset Feature selection (RSFS) [35], Independent Component Analysis (ICA) [34], I-PCA [34], Vector Quantization (VQ) [36], and Frequency Sensitive Competitive Learning (FSCL) [37,38].
In this context, we aim to monitor animals in extensive farming in the north part of Spain (in the Pyrenees area, near the border with France). We have two main objectives: Firstly, we need to track the movement of the animals to evaluate their impact on the plant biodiversity. This could be done just by using a device fitted with a GNSS receiver that would collect the positions during the time the animals are in the mountain and download them when they are returned to the barns. Secondly, we intend to virtually reduce the distance between the animals and the shepherds. For this reason, it is necessary to relay the positions and statuses of the animals in real time. As the selected area has no guaranteed coverage from any TSP, it has been necessary to focus on a different approach.
Our proposal is a wearable equipped with inertial sensors, GNSS and wireless communications. Including adaptive analysis and VQ compression model in the wearable achieving high compression ratios with good peak signal-to-noise ratios (PSNR) [39] allows for real-time monitoring and logging of cattle’s position and activities. We have chosen a transceiver with both FSK and LoRa capabilities. As it has been mentioned before, there is no coverage by TSPs and links based on these modulations have proven its utility in open farming scenarios. We focused our electronic design on achieving very low energy consumption, allowing for several months of battery runtime. We have evaluated both the wearable and the system performance for tracking cows in real scenarios, such as mountains and forest.
The rest of the paper is structured as follows: first, the characteristics of the wearable, its capabilities and the operation modes are defined; then, laboratory experimentation and field tests are presented; and lastly, system characteristics and work results are discussed.
2. Materials and Methods
2.1. Wearable Design
The wearable integrates several sensors for measuring temperature, acceleration, and magnetic fields. It also features a GNSS positioning module and a LoRa transceiver able to transmit using FSK and LoRa modulations for communication purposes. In the processing side there is a 64 Mbit NOR flash for storing tracking data, a 16-bit MCU with low-power features and a power management circuitry that allows being powered with any battery chemistry and recharging it from different power sources like solar panels, induction, thermoelectric and piezoelectric (Figure 3 [40]).
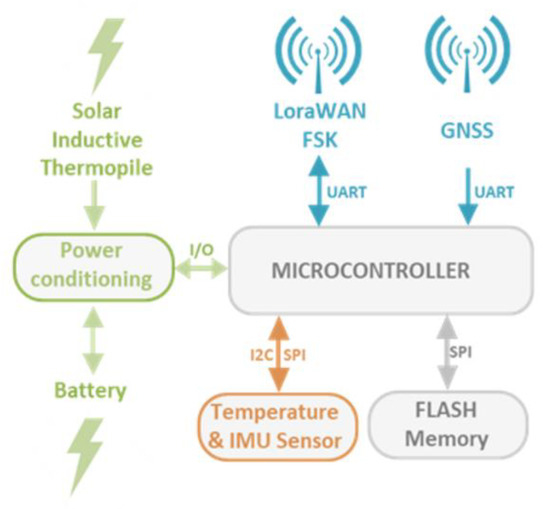
Figure 3.
Hardware block diagram.
The design objectives considered several perspectives, mainly that of the shepherd and that of the animal, as two types of users with different needs. Thus, the design specifications were aimed at ensuring high resistance to shock and water; compatibility with different existing strap attachment methods; ease of attachment and removal; and acceptance of the device by the host. We designed, tested and redesigned various 3D enclosures to verify different formalizations, finishing angles, and manufacturing materials. Finally, we selected a clam design with an o-ring that stays in place with four screws. The enclosure has two slots with different sizes allowing different-sized animals to comfortably wear them (e.g., sheep and cows). We have successfully performed waterproof IP68 testing. Final design can be seen in Figure 4.
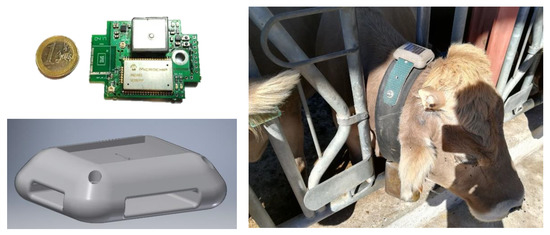
Figure 4.
3D and final prototype.
2.2. Logic and Communications
We consider several modes each with different configuration parameters:
- Beacon: GNSS is sampled at TGNSS and once position is acquired, it is saved in flash memory, sent via LoRaWAN and then the transceiver waits for a configuration message from the server before going to sleep. If no GNSS signal is detected for TTIMEOUT, last known coordinates are sent. It can follow a smart behavior if desired. Then, GNSS is acquired only if movement has been detected between two TGNSS periods. Movement condition is asserted by the inertial measurement unit (IMU) itself, as it activates an interrupt when an ATRHESOHLD is exceeded. If no smart behavior is set, the device sends GNSS regardless of the movement condition.
- Movement: on top of the beacon smart mode, the wearable streams IMU data at TSENSOR period. As IMU raw data stream would lead to a duty cycle policy violation, we have implemented four different behaviors to prevent exceeding it:
- ○
- Continuous: The easiest way to get maximum bitrate is to use FSK modulation to achieve 50 Kbps. Considering that the accelerometer has 14 bit precision measurements, at EU868 (869.525 MHz) frequency, the one with the best duty cycle (10%), we can stream at:
Unfortunately, this is not LoRaWAN compliant as duty cycle and bitrate are above limits. Thus, assuming duty cycle policies from EU868 region (1%), usual DR5 LoRaWAN modulation, according to Equation (2), we can stream around one sample per second.If we just send one piece of axis data, the can reach 3.4 Hz, which could lead to sending more meaningful data.- ○
- Coded: this mode behaves similarly to the previous, but it includes an additional step where the data is compressed prior to be sent [30]. VQ compression defines a NxM look-up table (codebook), being N the number of centroids, i.e., the number of different compressed samples that can be chosen for being transmitted, and M the size of the signal that each centroid represents. The compression algorithm accumulates a window of M samples of the signal and picks the centroid that better fits the original signal (minimizing mean squared error). Then, just the index of the centroid is transmitted, and the signal can be reconstructed at the reception by accessing the codebook with the index. The number of centroids N and the size of the window M allows establishing in advance the compression rate to be achieved (and thus increasing effective ):The codebook has to be generated previously with a machine learning algorithm that is trained with samples of the data to identify the centroids that will lead to better PSNR figures with the desired compression rate, Our major limitation is the memory available in the device. Using this mode, we can go up to 20 Hz sampling at DR5 over LoRaWAN protocol with good performance.
- ○
- Burst: this mode detects movement and then accumulates several seconds of data. Then, in order to comply with LoRaWAN regulation, we split the packet between the available channels using a scheduler that monitors channel usage and prevents messages to be sent when the duty cycle is about to be exceeded. When this happens, new data is discarded until we are ready to send again. Using this mode, we can send 3-s bursts at 10 Hz sampling at DR5 over LoRaWAN protocol.
- ○
- Smart: The smart strategy is like burst mode but before sending data, it analyzes it to check if no movement is detected; in that case, movement data is discarded, and not sent. This condition is determined when the maximum peak to peak value of the last five seconds of data is below a threshold ANO-MOVE. This threshold is configurable to adjust sensitivity of the device.
- Config: this mode sends LoRaWAN beacons every 10 s, allowing downlink messages that configure the wearable. Config mode is automatically entered after a hard reset and lasts TCONFIG. In this mode we can retrieve the GNSS samples stored in flash memory and send them through FSK packets.
- Standby: this is the lowest energy consumption mode where the wearable just sleeps. The only way to exit this state is via hard reset.
Figure 5 illustrates firmware’s flow diagram integrating all modes.
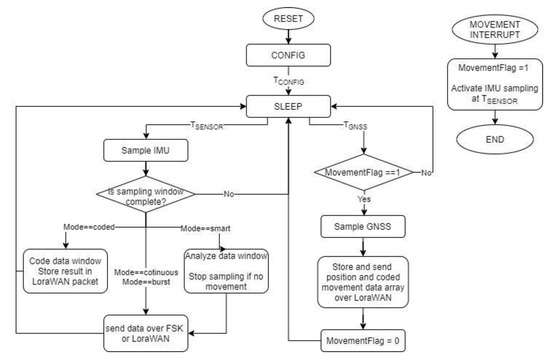
Figure 5.
Firmware’s flow diagram.
To customize the settings for this device, we define a configuration message via LoRaWAN, although it is also possible to do so via USB. According to LoRaWAN specification, as a class A device, each time an uplink message is sent, there are two receiving windows when the device can receive downlink messages. This is the reason why in config mode the devices send beacon messages each 10 s during 1 min.
Thus, there is one downlink message used for wearable configuration and two possible payloads to upload: one with GNSS data and the other is the IMU data arrays. Both GNSS data and configuration messages use LoRaWAN infrastructure because they are short messages that are not sent very often and occur at deterministic times. This allows us to meet fair use policies [41] needed to use available LoRaWAN infrastructure in the field, being the best-effort approach, as there are many available gateways that can route the packets to the cloud. Besides features such as security, encryption, retry counter to monitor for unreachable nodes, LoRaWAN allows us to send configuration packets whenever a device becomes available and the network layer allows for acknowledged packets.
Meanwhile, IMU data is heavy, occurs non-deterministically and needs to be time stamped and managed as it occurs. We have considered using two different modulations as we have two use cases: burst and continuous transmission. The first one is used when we might be interested in sporadic data sampled and low frequencies (less than 5 Hz), and it is possible to get benefit from the extra range LoRa provides on noisy environments. This kind of behaviour is acceptable for the deployment in open field areas where there are animals free to move long distances. Firmware needs to check whether the payloads meet the regulation duty cycle; in case we generate more data than the number of bytes we can send, the device will send data until it reaches the maximum airtime allowed and then it will disable the transceiver until it could send data again.
In case that continuous animal monitoring is needed, the fastest bitrate is available through FSK modulation. The only downsides are the short range and the compatibility with commercial LoRaWAN gateways. Additionally, no network layer is provided so routing is up to the software implementation.
2.3. Infrastructure and Backend
Wearable devices should work regardless of the infrastructure available and use its energy wisely in any condition. We consider two different scenarios: a completely online infrastructure when both beacon and streaming messages can be received by stationary IP-connected gateways and a portable offline infrastructure when there are no stationary gateways in range and just a shepherd with a gateway that can receive beacons. The system infrastructure and communications flow are shown in Figure 6.
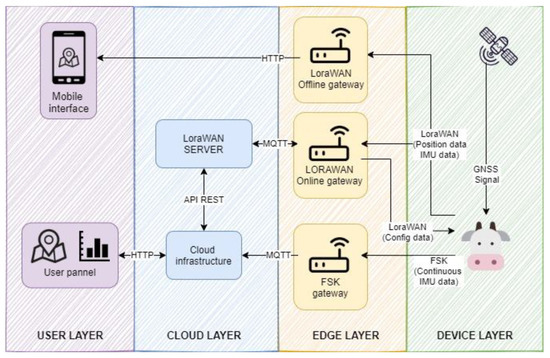
Figure 6.
System infrastructure and communication flow.
In the first case scenario, we use a commercial gateway that connects to a TSP and send messages to a LoRaWAN Server. Then, we use MQTT integrations to deliver the data to a self-hosted database, and we provide a user dashboard where data can be visualized. It is the most straightforward way to deploy a LoRaWAN network. We use an additional LoRa gateway to route the FSK traffic that cannot be decoded by commercial gateways directly to our database.
For the second scenario, we developed a gateway using an embedded system (Raspberry Pi) with headless Linux, where we install a custom LoRaWAN server that allows for offline logging and storage of payloads. GNSS payloads are decoded and sent to a web application that runs an offline maps viewer. It consists of a Leaflet map with OSM tiles and Flask server. Users can check the last reports received on interactive browser window in their mobile or tablet devices. A WiFi AP is deployed by the gateway to provide TCP/IP connection with the user mobile device.
Both gateways use an 8-channel concentrator card that demodulates all channels at the same time and provides the encrypted payload to the host system. LoRaWAN payload is end-to-end encrypted with AES cryptographic algorithms [42], based on the AppKey parameter, known to node and server. In the online scenario the payload is sent to the server to decode it, but in the offline scenario the host system must use the key to decrypt the payload on the fly. The gateway also run a full featured LoRaWAN server for management of devices, database integration and input/output pipelines.
3. Results
We chose to split test into two different stages. The first one will include all test to characterize the electronics, such as power consumption, RF performance and digital modulation. After verifying that all hypotheses are correct, we take the sensors to the fields so we can perform real world measurements.
3.1. Laboratory Tests
3.1.1. Energy and Timing Analysis
The idea behind the programming done in this device is to fine tune parameters to achieve the better range for each use case while maintaining the lowest power figure. Previously we stated that we were using both LoRa and FSK modulations. Additionally, LoRa packets are coded into LoRaWAN frames, that allows an easy deployment in most cases. In these tests we will verify the compromise between speed and power consumption in two different data rates (DR1 and DR5) and FSK modulation. Later, we will check what influences does it have in range if any. Laboratory test setup comprise several sensor nodes all programmed to do the following SmartIMU tasks:
- -
- First (Figure 7), the sensor samples data from IMU at 12.5 Hz when an event is detected, until desired payload length is achieved. Data are sent through LoRaWAN at DR5, the fastest available at any channel. Then, GNSS receiver is turned on until fix is achieved, and it is sent through LoRaWAN at DR1, the second slowest. We chose DR1 for location data because it let us send data each minute if IMU streaming is turned off, to comply with the duty cycle shows the current while doing a basic SmartIMU task.
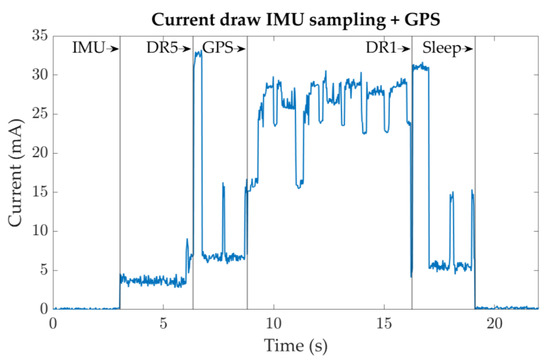 Figure 7. Current consumption while sampling IMU at 12.5 Hz and activating GNSS receiver.
Figure 7. Current consumption while sampling IMU at 12.5 Hz and activating GNSS receiver. - -
- Second (Figure 8), we stream accelerometer data at the highest possible resolution with FSK modulation. This mode is used to define activation thresholds and deciding on the filter constants for the embedded IMU unit registers.
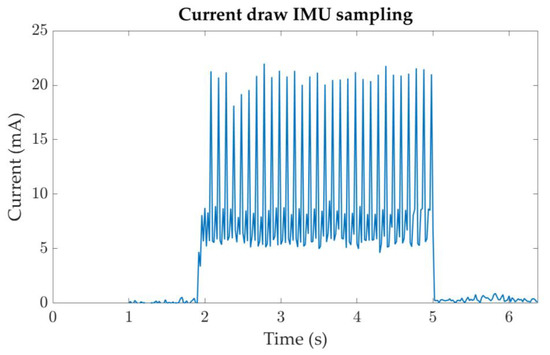 Figure 8. Current consumption while streaming IMU data sampled at 100 Hz.
Figure 8. Current consumption while streaming IMU data sampled at 100 Hz.
Our communication model consist of the modes previously explained and which performance is summarized in Table 1. We can observe that each mode is matched to the best modulation for the use case. The best link budget is allowed in GNSS reports, which requires the best sensitivity. In motion reports we value speed over reception, so we chose a faster data rate. For monitoring purposes when we are close to the animal, we can use FSK for the fastest available data rate.

Table 1.
Communication modes performance analysis.
The device must be usable on animals that usually spend a whole year grazing on the field. According to the previous power consumption requirements we calculated the battery life for each mode as shown in Table 2.
Table 2.
Device mode energetical analysis.
3.1.2. Data Reconstruction Analysis
In order to generate the codebook, VQ compression requires data to train the algorithm. As we have not yet collected enough motion data from the wearable in its intended operation scenario, we have accomplished the data reconstruction analysis with motion data from the Heterogeneity Activity Recognition Dataset [43], which provides a rich collection of inertial sensor data recorded in smartphones and smartwatches in different activities. Detailed analysis can be found in [39]. For example, considering sampling frequencies of 10 and 20 Hz, window sizes of 1, 5 and 10 s, we can achieve different compression ratios and codebook sizes as shown in Table 3.
Table 3.
Compression ratio and codebook size vs. codebook parameters.
Shorter number of centroids with larger window sizes led to higher compression ratios which turns into lower required data rates, but they will also reduce PSNR as signal loss is greater. PSNR is computed as:
where MAX is the maximum value for the signal and MSE is the maximum squared error. For example, we can see the efect of varing the number of centroids of the codebook in a sample dataset of 1,500,000 training samples and 600,000 test samples at a sampling frequency of 100 Hz and window size of 1 s in Figure 9. Increasing the number of centroids for a given window size improves PSNR figures, as the reconstructed signal is closer to the original signal, although using too many centroids will produce overfitting and may lead to badly generalizable codebooks.
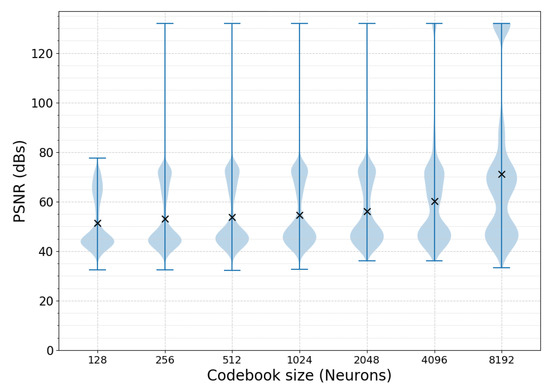
Figure 9.
Peak signal-to-noise ratio (PSNR) distribution vs. codebook centroids. (Sampling Freq. = 100 Hz, Window size = 1 s).
3.2. Field Tests
For the field test, we deployed two LoRaWAN gateways in Laspuña, north of Spain in the Pyrenees area. They feature the same receiver, but they were fitted with different antennas to prove that gain was not the most important factor with moving targets. The antennas have 4 and 6 dBi gain. Five sensor nodes were set with a movement burst streaming config, reporting position each minute and sampling IMU data at 12.5 Hz. With several devices, we could sample more data and spot any outliers. Sensors were fitted on a 1.8 m person’s back using straps as in a cow’s neck. The route chosen was a typical cattle path and a nearby ravine where cows usually get lost in.
3.2.1. Communications Performance
In Figure 10, we have a close-up vision of how the position reports were received and the strength of the signal. In most cases the reports were under the 120 dBm mark, except for some good line of sight reports. The gateways were located on the south side of the mountains, 12 km from the furthest point.
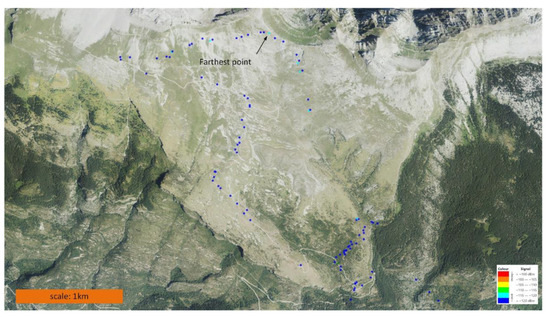
Figure 10.
Data reports received. Distance from gateway to farthest point is 12 km.
The distances achieved ranged from 10 to 12 km to both gateways with almost no difference in signal strength between them. The elevation profile (Figure 11) depicts the position of the gateway and the range of altitude covered with the tracker. It also shows some obstacle at 8.6 and 3 km. Depending on the distance and height the contribution to path loss is variable. RSSI in the tracking area goes from −115 to −135 dBm.
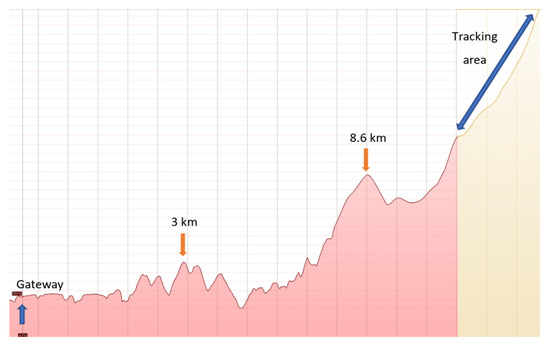
Figure 11.
Range and elevation profile.
3.2.2. Movement Data Analysis
The streaming data from the person walking through the path is shown in Figure 12. Samples are stitched together to make picturing the activity easier. Same activity is repeated over the span of several hours. In Figure 13, we can see the result of some burst-reports that were interpolated to avoid idle periods between bursts but clearly reflects that the same activity is taking place continuously.
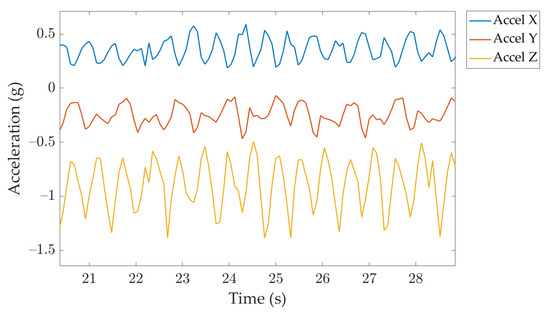
Figure 12.
Continuous movement streaming using FSK in farm (100 m range).
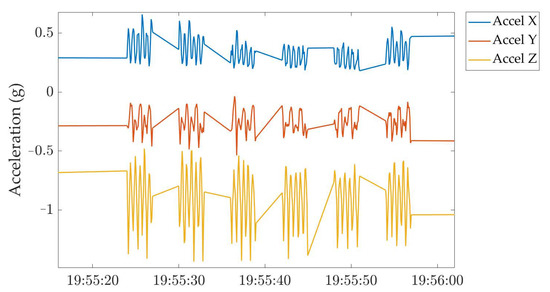
Figure 13.
Burst movement streaming using LoRaWAN (DR5) in mountains (12 km range).
4. Discussion
The wearable and infrastructure introduced in this work has proved to be a valuable and flexible tool, as it allows for both field deployment and laboratory research.
The main purpose in these field application scenarios is providing animals GNSS localization for both audit tracking and finding the cattle. Field tests shows communication links ranging up to 12 km with direct line of sight, allowing coverage of large areas with minimal infrastructure. Theoretically, a single receiver would serve an area of 452 km². This allows for LoRaWAN setups that are both cheaper and more convenient than deploying cellular repeaters for low data rate needs such as position reports. Even if the requirements include motion reports with accelerometer data, the system proves reliable and still achieves long range, at the expense of extra battery life and bandwidth usage. This motion data could be used for health monitoring and developing future activity recognition algorithms.
If any of the animals become lost outside the infrastructure’s line of sight, the system may operate without infrastructure, with just an offline gateway and a mobile device. The system is capable of indicating the location of the animals in a self-hosted application that may operate in environments without internet access. This makes tracking the animal possible where a fixed infrastructure or the nonexistent cellular coverage would fail to locate it.
In addition, our system allows registering periodic bursts of raw movement data without affecting normal operation nor violating LoRaWAN regulatory constraints. Registering complete motion data is possible in controlled environments (such as indoor barns) where we use a faster data rate along with FSK modulation, so duty cycles are not compromised. It should be noted that full motion data streaming is applicable only for monitoring a reduced number of devices, as the band may be saturated despite complying with the use restrictions. Animals belonging to the same group are expected to behave similarly so this should not pose a problem.
Using the proposed VQ compression model, motion data can be sampled at high frequency and we can adjust compressor parameters to fit the required data rate within the limits imposed by LoRaWAN. Larger window sizes with shorter number of centroids will lead to lowest data rates, but PSNR figures will be affected also, thus configurations that use most of the available data rate and maximize the number of centroids without overfitting should be preferred. Considering size of compression model, its implementation is highly dependent on both static and dynamic memory available in the embedded device. We can use internal memory for small codebooks (e.g., three axes at 10 Hz with 1 s window needs 15.36 KB for a 256 centroid codebook) or use the external FLASH memory to store the larger codebooks.
All these features are fulfilled with low energy consumption figures that ensure operation of the wearable throughout the whole season (even years if no raw movement data is required) when animals are outdoors. Even in the most demanding scenario with GNSS sampling and raw data sending over LoRaWAN (4 months) or FSK (8 months) the system serves as valuable cattle monitoring infrastructure. Together with regulatory compliance, this enables utilization of the system in real applications.
We can extract conclusions at different levels comparing our system with other approaches in the literature.
- -
- Communications: Use of LoRa allows long range point to point communications with reduced energy consumption and medium data bandwidth (up to 5.5 kbps). We have achieved a maximum of 12 km in mountain environment with enough link budget. Systems based in communications provided by TSPs (GPRS [6], satellite [44], NBioT [45], SigFox [7]) do not require deployment of any additional communication infrastructure, but they will not work where there is no coverage. Furthermore, cellular links use much more energy for communication than LoRa; 2 W [46] against 25 mW. This has a remarkable impact in battery life but also in reduced radiofrequency radiation to the animals, which means less heating due to SAR (specific absorption rate). Such power is completely safe as shown in [47,48,49,50,51]. Other LPWAN technologies such as SigFox use similar amount of energy but the duty policies allow just 144 messages per day [52] and it is not enough to send movement data. Satellite communications main drawback is the associated cost, which is quite high if we are sending movement data. Finally, systems based in medium-range sensor networks such as Zigbee [8,9,10] require higher density of routers making the required infrastructure much larger.
- -
- Infrastructure: Our system can work in three different scenarios: using a LoRaWAN telecom infrastructure (e.g., Everynet [53]), deploying ad hoc LoRaWAN gateways connected to Internet or, as we also propose to find cattle, carrying (on a person or a drone [54]) a mobile offline gateway. We have not found any other approach that gives such flexibility.
- -
- Data: Derived from the challenging communications and long battery life requirements, most systems having wide coverage only send so much data; mainly GPS. Fewer systems have onboard non-volatile memory that provides larger data recording. Those systems using wireless sensor networks and even WiFi [55] are not limited in terms of data throughput and can monitor large number of parameters (but they require a dense infrastructure). Our system does not require such bulky infrastructure, but still thanks to choosing the right coding technique, it can send movement data in real time.
5. Conclusions
Information and Communication Technologies (ICT-based) solutions are improving the productivity of all industrial sectors, even agriculture and livestock. They should also improve the well-living of the people across the World. Nevertheless, in many cases, the success of one of these solutions is linked to the availability of communication infrastructures that could provide support for the “C” of ICT. In developed countries, where we could assume that communication infrastructures should have a high degree of deployment, agriculture and livestock are usually related with rural areas where these infrastructures begin to loss their capacities. Unfortunately, in the rest of the World, this lack of communications capacities begins even in the big cities.
If we put the focus on extensive livestock, we can find that, in Europe, it is usually restricted to remote areas, where the communications infrastructures are not capable to provide any kind of services for deploying ICT solutions. In other countries, we can find extensive livestock also near the big cities, but this does not guarantee the availability of communications services (or they are but a high price).
This paper has presented a solution for dealing with this problem of lack of stablished communication infrastructures for controlling the movements of animals from extensive livestock farms. It is based on the development of an animal wearable that is equipped with inertial sensors, GNSS and wireless communications. It also includes enough computation capacity for making adaptive analysis and VQ compression that provides high compression ratios with good peak signal-to-noise ratios, and allows for real-time monitoring and logging of cattle’s position and activities. This wearable has been evaluated in real scenarios, such as mountains and forest, in the context of a project that aims to monitor animals in extensive farming in the north part of Spain (in the Pyrenees area, near the border with France). This project includes the necessity to track the movement of the animals to evaluate their impact on the plant biodiversity, as well as the intention to virtually reduce the distance between the animals and the shepherds.
Author Contributions
Conceptualization, R.C. and F.J.Z.-S.; methodology, F.J.Z.-S. and T.B.; hardware and software, R.C., A.H. and Á.M.; design, T.B.; validation, R.C., A.H. and T.B.; writing, review and editing, All; project administration and funding acquisition, R.C. and F.J.Z.-S. All authors have read and agreed to the published version of the manuscript.
Funding
This work has been partially supported by the Aragon regional Government thought the program for R&D groups (T27_20R and T59_20R) and by the Rural Development Program in conjunction with FEADER from EC (GCP2019004100). The work of Alvaro Marco and Teresa Blanco has been partially supported by the Spanish Government, program Torres Quevedo (PTQ2017-09481 and PTQ2018-010045, respectively).
Institutional Review Board Statement
Ethical review and approval were waived for this study, due to it was accomplished within the context of the works related to the Rural Development Program, where shepherds agreed with these trials. Only a limited number of animals were involved in the study, and they were not exposed to harmful levels of radiation, as discussed in the text.
Informed Consent Statement
Not applicable.
Conflicts of Interest
The authors declare no conflict of interest.
References
- Nori, M.; Switzer, J.; Crawford, A. Herding on the Brink: Towards a Global Survey of Pastoral Communities and Conflict; International Insitute for Sustainable Development: Winnipeg, MB, Canada, 2005. [Google Scholar]
- Some, J. Can Pastoralism Survive in the 21st Century? Available online: https://www.thenewhumanitarian.org/news/2007/07/13/can-pastoralism-survive-21st-century (accessed on 14 December 2020).
- Isselstein, J.; Jeangros, B.; Pavlu, V. Agronomic Aspects of Biodiversity Targeted Management of Temperate Grasslands in Europe—A Review. Agron. Res. 2005, 3, 139–151. [Google Scholar]
- Finck, P.; Riecken, U.; Schröder, E. Pasture Landscapes and Nature Conservation—New strategies for the preservation of open landscapes in Europe. In Pasture Landscapes and Nature Conservation; Springer: Berlin, Germany, 2002; pp. 1–13. [Google Scholar]
- Temple, D.; Manteca, X. Animal Welfare in Extensive Production Systems Is Still an Area of Concern. Front. Sustain. Food Syst. 2020, 4, 154. [Google Scholar] [CrossRef]
- Lomillos Pérez, J.M.; de la Varga, M.E.A.; García, J.J.; Gaudioso Lacasa, V.R. Monitoring Lidia Cattle with GPS-GPRS Technology—A Study on Grazing Behaviour and Spatial Distribution. Vet. México 2018, 4, 1–17. [Google Scholar] [CrossRef]
- Llaria, A.; Terrasson, G.; Arregui, H.; Hacala, A. Geolocation and Monitoring Platform for Extensive Farming in Mountain Pastures. In Proceedings of the IEEE International Conference on Industrial Technology, Seville, Spain, 17–19 March 2015; pp. 2420–2425. [Google Scholar]
- Huircán, J.I.; Muñoz, C.; Young, H.; Von Dossow, L.; Bustos, J.; Vivallo, G.; Toneatti, M. ZigBee-Based Wireless Sensor Network Localization for Cattle Monitoring in Grazing Fields. Comput. Electron. Agric. 2010, 74, 258–264. [Google Scholar] [CrossRef]
- Krishnan, A.J.; Binu, G. Energy Efficient Tree Construction for ZigBee Router Network. In Proceedings of the 2017 2nd International Conference on Communication and Electronics Systems (ICCES), Coimbatore, India, 19–20 October 2017; pp. 746–751. [Google Scholar]
- Nkwari, P.K.M.; Rimer, S.; Paul, B.; Ferreira, H. Heterogeneous Wireless Network Based on Wi-Fi and ZigBee for Cattle Monitoring. In Proceedings of the 2015 IST-Africa Conference, Lilongwe, Malawi, 6–8 May 2015; pp. 1–9. [Google Scholar]
- Sampath, A.; Meena, P. A Novel Approach to Cattle Health Monitoring for Maximizing Dairy Output Using LoRa IoT Technology. IJARCCE 2019, 8, 94–102. [Google Scholar] [CrossRef]
- Zinas, N.; Kontogiannis, S.; Kokkonis, G.; Valsamidis, S.; Kazanidis, I. Proposed Open Source Architecture for Long Range Monitoring. The Case Study of Cattle Tracking at Pogoniani. In Proceedings of the Panhellenic Conference on Informatics, Larissa, Greece, 28–30 September 2017; pp. 1–6. [Google Scholar]
- Codeluppi, G.; Cilfone, A.; Davoli, L.; Ferrari, G. LoRaFarM: A LoRaWAN-Based Smart Farming Modular IoT Architecture. Sensors 2020, 20, 2028. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Kovacs, J.M. The Application of Small Unmanned Aerial Systems for Precision Agriculture: A Review. Precis. Agric. 2012, 13, 693–712. [Google Scholar] [CrossRef]
- Daponte, P.; De Vito, L.; Glielmo, L.; Iannelli, L.; Liuzza, D.; Picariello, F.; Silano, G. A Review on the Use of Drones for Precision Agriculture. In IOP Conference Series: Earth and Environmental Science; IOP Publishing: Bristol, UK, 2019; p. 12022. [Google Scholar]
- Mogili, U.R.; Deepak, B. Review on Application of Drone Systems in Precision Agriculture. Procedia Comput. Sci. 2018, 133, 502–509. [Google Scholar] [CrossRef]
- Barbedo, J.G.A.; Koenigkan, L.V.; Santos, P.M.; Ribeiro, A.R.B. Counting Cattle in UAV Images—Dealing with Clustered Animals and Animal/Background Contrast Changes. Sensors 2020, 20, 2126. [Google Scholar] [CrossRef]
- Aburasain, R.; Edirisinghe, E.; Albatay, A. Drone-Based Cattle Detection Using Deep Neural Networks; Springer: Berlin, Germany, 2020; pp. 598–611. [Google Scholar]
- Shao, W.; Kawakami, R.; Yoshihashi, R.; You, S.; Kawase, H.; Naemura, T. Cattle Detection and Counting in UAV Images Based on Convolutional Neural Networks. Int. J. Remote Sens. 2020, 41, 31–52. [Google Scholar] [CrossRef]
- Rivas, A.; Chamoso, P.; González-Briones, A.; Corchado, J.M. Detection of Cattle Using Drones and Convolutional Neural Networks. Sensors 2018, 18, 2048. [Google Scholar] [CrossRef]
- Li, X.; Xing, L. Reactive Deployment of Autonomous Drones for Livestock Monitoring Based on Density-Based Clustering. In Proceedings of the International Conference on Robotics and Biomimetics (ROBIO), Dali, China, 6–8 December 2019; pp. 2421–2426. [Google Scholar]
- Barbedo, J.G.A.; Koenigkan, L.V. Perspectives on the Use of Unmanned Aerial Systems to Monitor Cattle. Outlook Agric. 2018, 47, 214–222. [Google Scholar] [CrossRef]
- Chapa, J.M.; Maschat, K.; Iwersen, M.; Baumgartner, J.; Drillich, M. Accelerometer Systems as Tools for Health and Welfare Assessment in Cattle and Pigs—A Review. Behav. Process. 2020, 181. [Google Scholar] [CrossRef] [PubMed]
- Williams, L.; Fox, D.; Bishop-Hurley, G.J.; Swain, D. Use of Radio Frequency Identification (RFID) Technology to Record Grazing Beef Cattle Water Point Use. Comput. Electron. Agric. 2019, 156, 193–202. [Google Scholar] [CrossRef]
- Godyń, D.; Herbut, P.; Angrecka, S. Measurements of Peripheral and Deep Body Temperature in Cattle—A Review. J. Therm. Biol. 2018, 79. [Google Scholar] [CrossRef]
- Priya, M.; Jayaram, B. WSN-Based Electronic Livestock of Dairy Cattle and Physical Parameters Monitoring. In Emerging Research in Electronics, Computer Science and Technology; Springer: Singapore, 2019; pp. 37–45. ISBN 978-3-662-53832-6. [Google Scholar]
- Wang, J.; He, Z.; Ji, J.; Zhao, K.; Zhang, H. IoT-Based Measurement System for Classifying Cow Behavior from Tri-Axial Accelerometer. Ciênc. Rural 2019, 49. [Google Scholar] [CrossRef]
- Tamura, T.; Okubo, Y.; Deguchi, Y.; Koshikawa, S.; Takahashi, M.; Chida, Y.; Okada, K. Dairy Cattle Behavior Classifications Based on Decision Tree Learning Using 3-Axis Neck-Mounted Accelerometers. Anim. Sci. J. 2019, 90. [Google Scholar] [CrossRef]
- Riaboff, L.; Aubin, S.; Bédère, N.; Couvreur, S.; Madouasse, A.; Goumand, E.; Chauvin, A.; Plantier, G. Evaluation of Pre-Processing Methods for the Prediction of Cattle Behaviour from Accelerometer Data. Comput. Electron. Agric. 2019. [Google Scholar] [CrossRef]
- Jalal, A.; Quaid, M.A.K.; Kim, K. A Study of Accelerometer and Gyroscope Measurements in Physical Life-Log Activities Detection Systems. Sensors 2020, 20, 6670. [Google Scholar]
- Marqués, G.; Basterretxea, K. Efficient Algorithms for Accelerometer-Based Wearable Hand Gesture Recognition Systems. In Proceedings of the 13th International Conference on Embedded and Ubiquitous Computing, Porto, Portugal, 21–23 October 2015; pp. 132–139. [Google Scholar]
- Sukor, A.A.; Zakaria, A.; Rahim, N.A. Activity Recognition Using Accelerometer Sensor and Machine Learning Classifiers. In Proceedings of the 14th International Colloquium on Signal Processing & Its Applications (CSPA), Penang, Malaysia, 9–10 March 2018; pp. 233–238. [Google Scholar]
- Jahanjoo, A.; Tahan, M.N.; Rashti, M.J. Accurate Fall Detection Using 3-Axis Accelerometer Sensor and MLF Algorithm. In Proceedings of the 3rd International Conference on Pattern Recognition and Image Analysis (IPRIA), Shahrekord, Iran, 19–20 April 2017; pp. 90–95. [Google Scholar]
- Sancheti, P.; Shedge, R.; Pulgam, N. Word-IPCA: An Improvement in Dimension Reduction Techniques. In Proceedings of the International Conference on Control, Power, Communication and Computing Technologies, Kannur, India, 23–24 March 2018; pp. 575–578. [Google Scholar]
- Padmaja, D.L.; Vishnuvardhan, B. Comparative Study of Feature Subset Selection Methods for Dimensionality Reduction on Scientific Data. In Proceedings of the 6th International Conference on Advanced Computing (IACC), Bhimavaram, India, 27–28 February 2016; pp. 31–34. [Google Scholar]
- Choudhury, S.; Bandyopadhyay, S.; Mukhopadhyay, S.; Mukherjee, S. Vector Quantization and Multi Class Support Vector Machines Based Fingerprint Classification. In Proceedings of the International Conference on Inventive Computation Technologies, Coimbatore, India, 26–27 August 2016; pp. 1–4. [Google Scholar]
- Banerjee, A.; Ghosh, J. Frequency-Sensitive Competitive Learning for Scalable Balanced Clustering on High-Dimensional Hyperspheres. IEEE Trans. Neural Netw. 2004, 15, 702–719. [Google Scholar] [CrossRef]
- Pelayo, E.; Buldain, D.; Orrite, C. Magnitude Sensitive Competitive Learning. Neurocomputing 2013, 112, 4–18. [Google Scholar] [CrossRef]
- Vizárraga, J.; Casas, R.; Marco, Á.; Buldain, J. Dimensionality Reduction for Smart IoT Sensors. Electronics 2020, 9, 2035. [Google Scholar] [CrossRef]
- Blanco, T.; Casas, R.; Manchado-Pérez, E.; Asensio, Á.; López-Pérez, J.M. From the Islands of Knowledge to a Shared Understanding: Interdisciplinarity and Technology Literacy for Innovation in Smart Electronic Product Design. Int. J. Technol. Des. Educ. 2017, 27, 329–362. [Google Scholar] [CrossRef]
- LoRa Alliance. LoRaWAN Regional Parameters. Available online: https://lora-alliance.org/sites/default/files/2020-06/rp_2-1.0.1.pdf (accessed on 14 December 2020).
- LoRaWAN Security Whitepaper. Available online: https://lora-alliance.org/sites/default/files/2019-05/lorawan_security_whitepaper.pdf (accessed on 14 December 2020).
- Stisen, A.; Blunck, H.; Bhattacharya, S.; Prentow, T.S.; Kjærgaard, M.B.; Dey, A.; Sonne, T.; Jensen, M.M. Smart Devices Are Different: Assessing and Mitigatingmobile Sensing Heterogeneities for Activity Recognition. In Proceedings of the 13th ACM Conference on Embedded Networked Sensor Systems, Seoul, Korea, 1–4 November 2015; pp. 127–140. [Google Scholar]
- Weise, F.J.; Hauptmeier, H.; Stratford, K.J.; Hayward, M.W.; Aal, K.; Heuer, M.; Tomeletso, M.; Wulf, V.; Somers, M.J.; Stein, A.B. Lions at the Gates: Trans-Disciplinary Design of an Early Warning System to Improve Human-Lion Coexistence. Front. Ecol. Evol. 2019, 6, 242. [Google Scholar] [CrossRef]
- Tang, Y.; Dananjayan, S.; Hou, C.; Guo, Q.; Luo, S.; He, Y. A Survey on the 5G Network and Its Impact on Agriculture: Challenges and Opportunities. Comput. Electron. Agric. 2021, 180, 105895. [Google Scholar] [CrossRef]
- ETSI UMTS Terrestrial Radio Access Network (UTRAN); UTRA FDD; Radio Transmission and Reception (UMTS XX.06 Version 1.0.0). Available online: https://www.3gpp.org/ftp/tsg_ran/TSG_RAN/TSGR_02/Docs/pdfs/RP-99028.pdf (accessed on 22 January 2021).
- Yamaguchi, H.; Tsurita, G.; Ueno, S.; Watanabe, S.; Wake, K.; Taki, M.; Nagawa, H. 1439 MHz Pulsed TDMA Fields Affect Performance of Rats in a T-maze Task Only When Body Temperature Is Elevated. Bioelectromagnetics 2003, 24, 223–230. [Google Scholar]
- Zook, B.C.; Simmens, S.J. The Effects of 860 MHz Radiofrequency Radiation on the Induction or Promotion of Brain Tumors and Other Neoplasms in Rats. Radiat. Res. 2001, 155, 572–583. [Google Scholar] [CrossRef]
- La Regina, M.; Moros, E.G.; Pickard, W.F.; Straube, W.L.; Baty, J.; Roti Roti, J.L. The Effect of Chronic Exposure to 835.62 MHz FDMA or 847.74 MHz CDMA Radiofrequency Radiation on the Incidence of Spontaneous Tumors in Rats. Radiat. Res. 2003, 160, 143–151. [Google Scholar] [CrossRef]
- Ziemann, C.; Brockmeyer, H.; Reddy, S.B.; Vijayalaxmi, M.; Prihoda, T.J.; Kuster, N.; Tillmann, T.; Dasenbrock, C. Absence of Genotoxic Potential of 902 MHz (GSM) and 1747 MHz (DCS) Wireless Communication Signals: In Vivo Two-Year Bioassay in B6C3F1 Mice. Int. J. Radiat. Biol. 2009, 85, 454–464. [Google Scholar]
- Utteridge, T.D.; Gebski, V.; Finnie, J.W.; Vernon-Roberts, B.; Kuchel, T.R. Long-Term Exposure of Eμ-Pim1 Transgenic Mice to 898.4 MHz Microwaves Does Not Increase Lymphoma Incidence. Radiat. Res. 2002, 158, 357–364. [Google Scholar] [CrossRef]
- Oliveira, L.; Rodrigues, J.J.; Kozlov, S.A.; Rabêlo, R.A.; Furtado, V. Performance Assessment of Long-range and Sigfox Protocols with Mobility Support. Int. J. Commun. Syst. 2019, 32, e3956. [Google Scholar] [CrossRef]
- Everynet. Coverage. Available online: https://www.everynet.com/coverage (accessed on 22 January 2021).
- Trasviña-Moreno, C.A.; Blasco, R.; Marco, Á.; Casas, R.; Trasviña-Castro, A. Unmanned Aerial Vehicle Based Wireless Sensor Network for Marine-Coastal Environment Monitoring. Sensors 2017, 17, 460. [Google Scholar]
- Sali, S.; Parvathi, C. Health Monitoring System Using Wireless Sensor Network. Int. J. Eng. Res. Appl. 2018, 8, 4–12. [Google Scholar]













Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).