

Design and Validation of a Biomimetic Leg-Claw Mechanism Capable of Perching and Grasping for Multirotor Drones
 ,
, 
Abstract
:1. Introduction
2. Design and Analysis of Mechanism
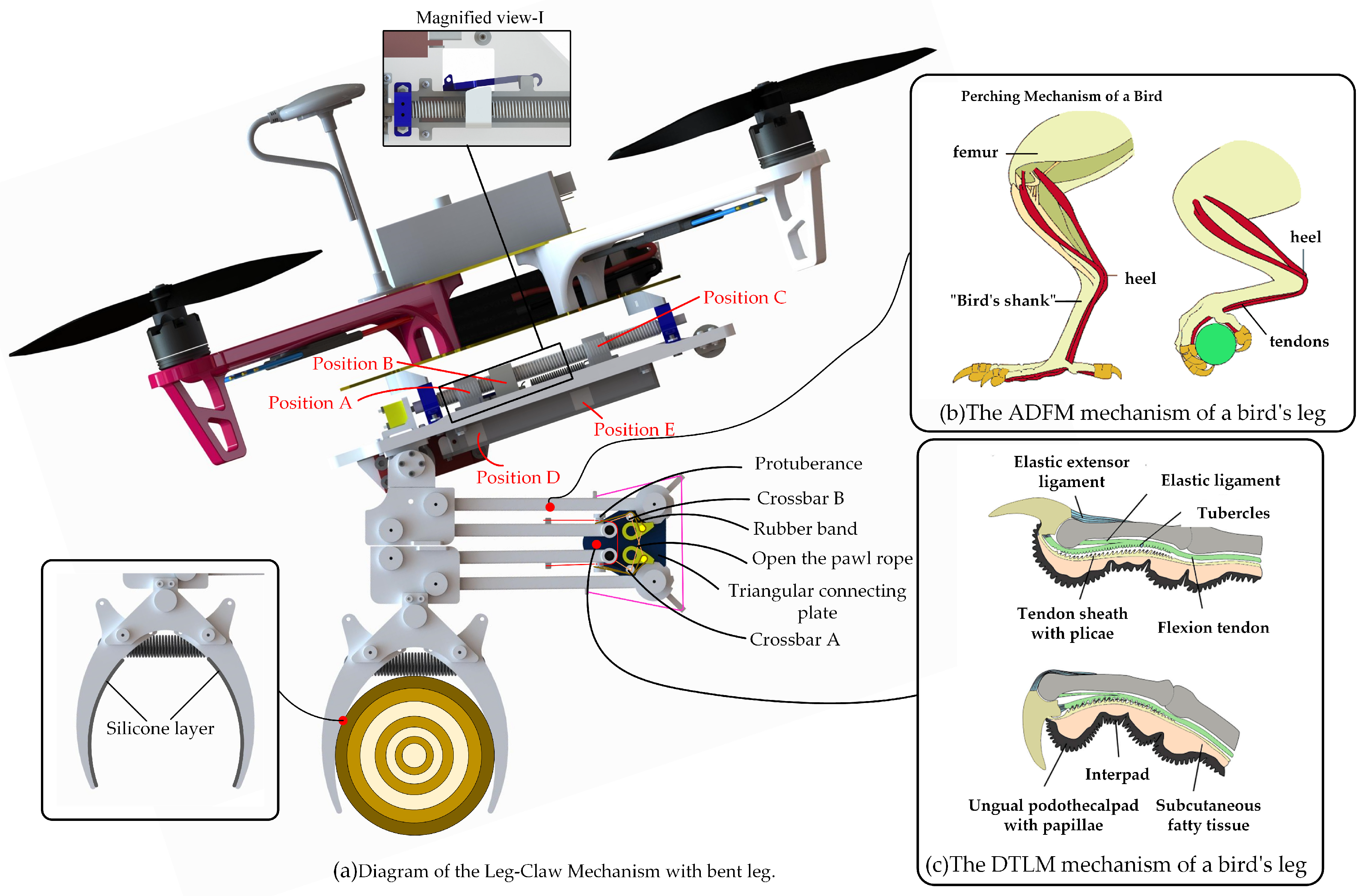
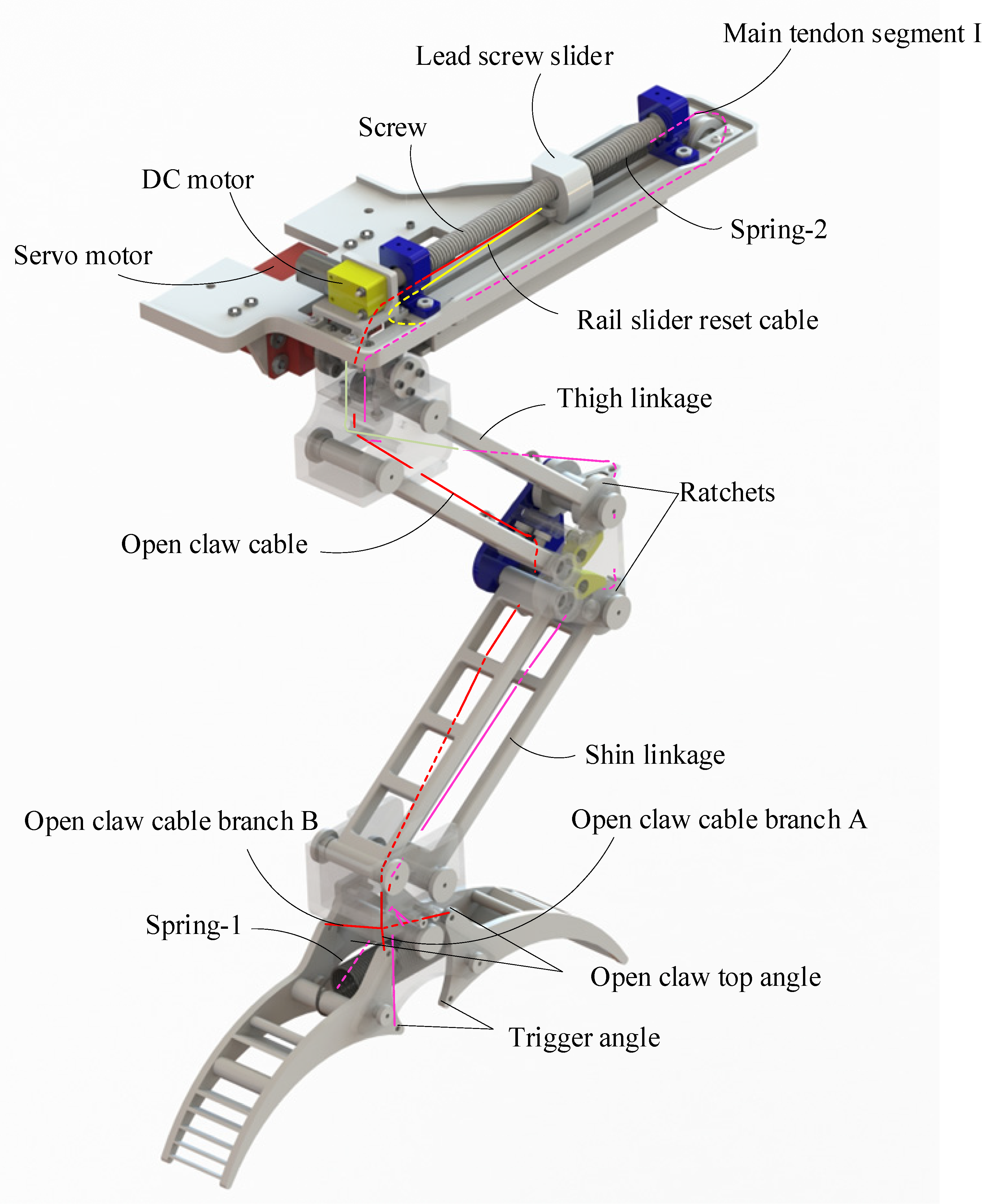
2.1. Biomimetic Structural Design
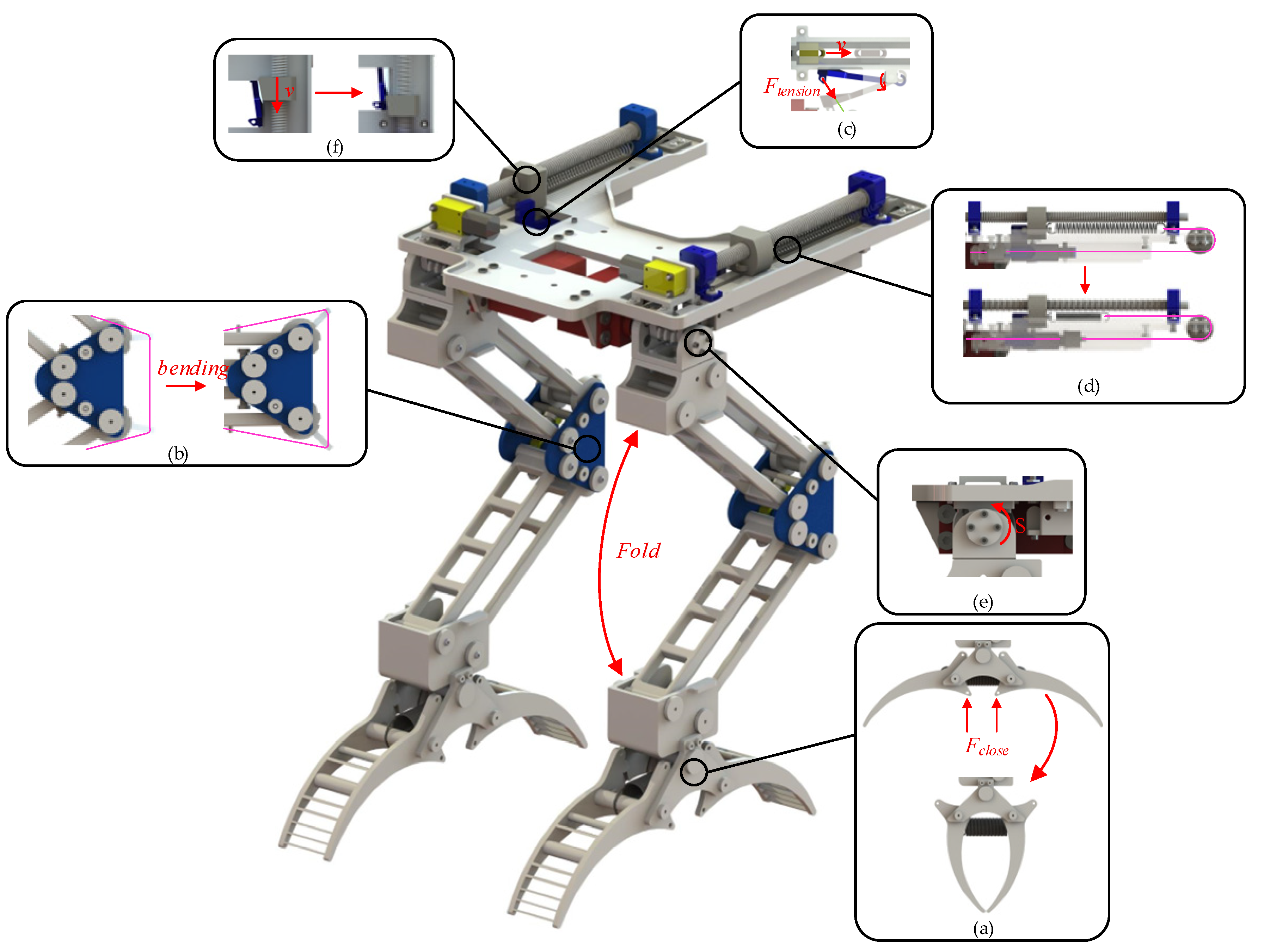
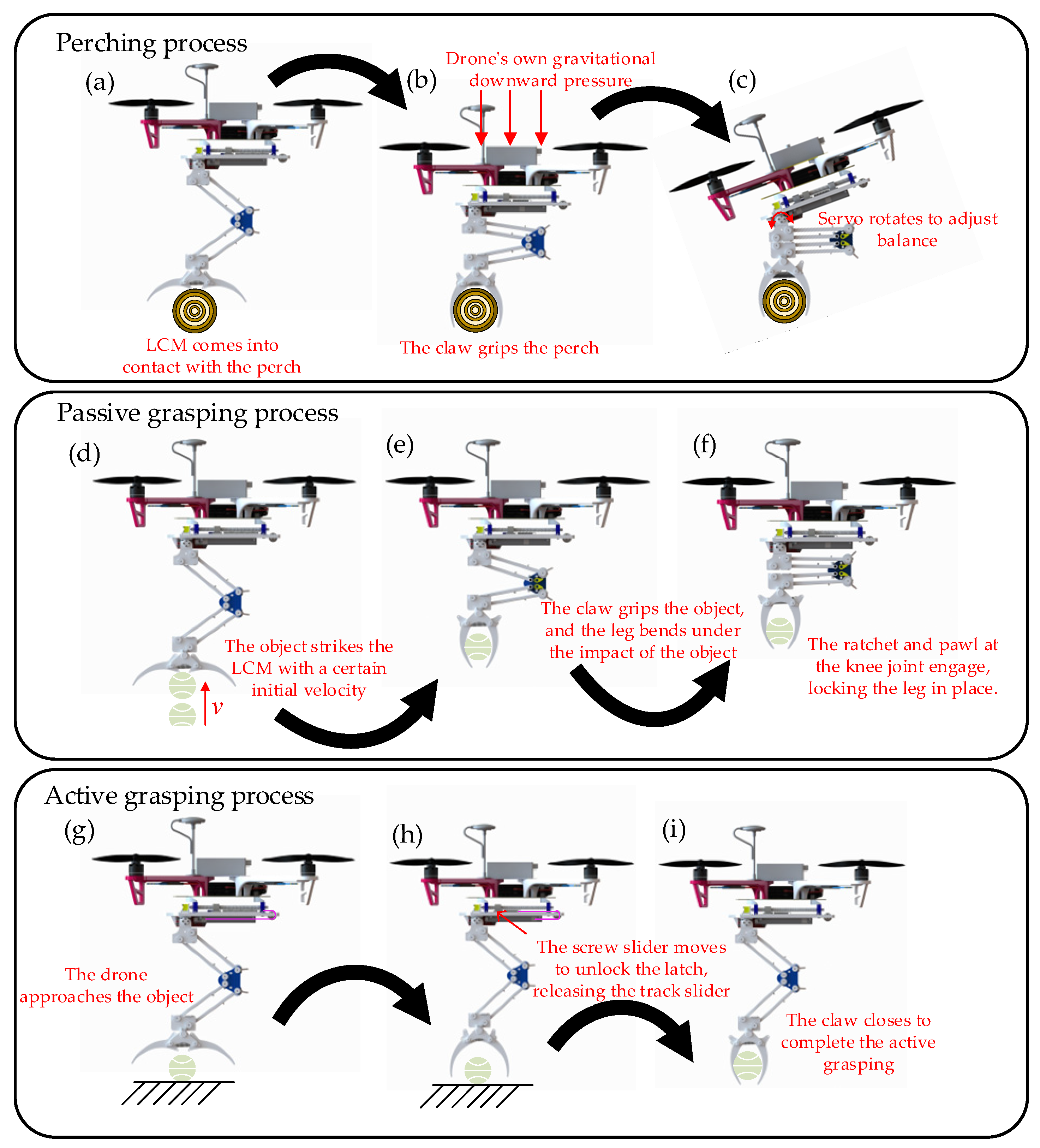
2.2. Analysis of Mechanism Motion Process
2.3. Analysis of Mechanical DoFs
3. Static Modeling of LCM
3.1. Force Required to Open the Dual Stable Gripper
3.2. Analysis of the Grasping Range of the LCM
3.3. Static Analysis of LCM Gripping Object
4. Experiment
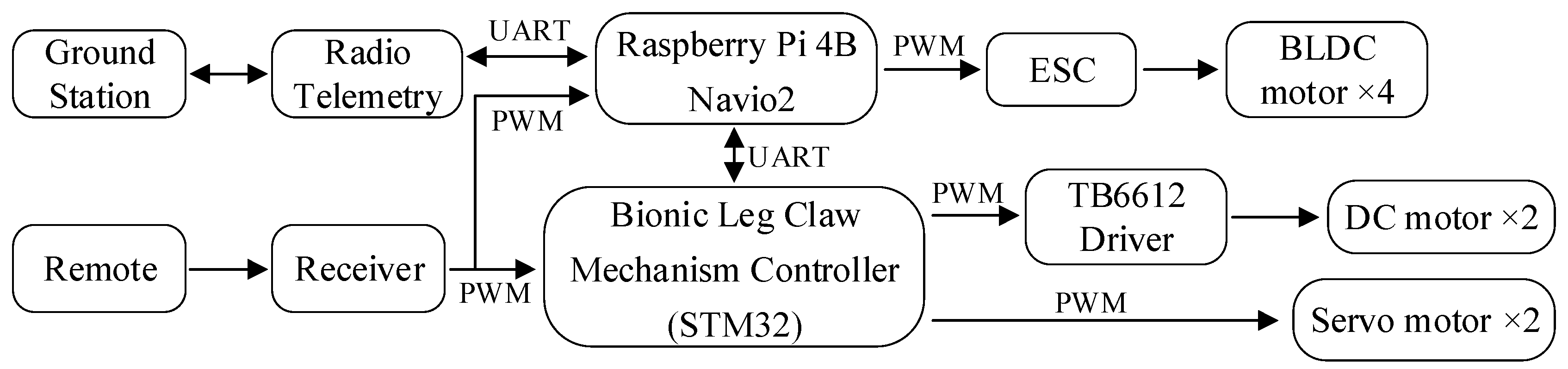
4.1. Construction of the Drone and LCM Experimental Platform
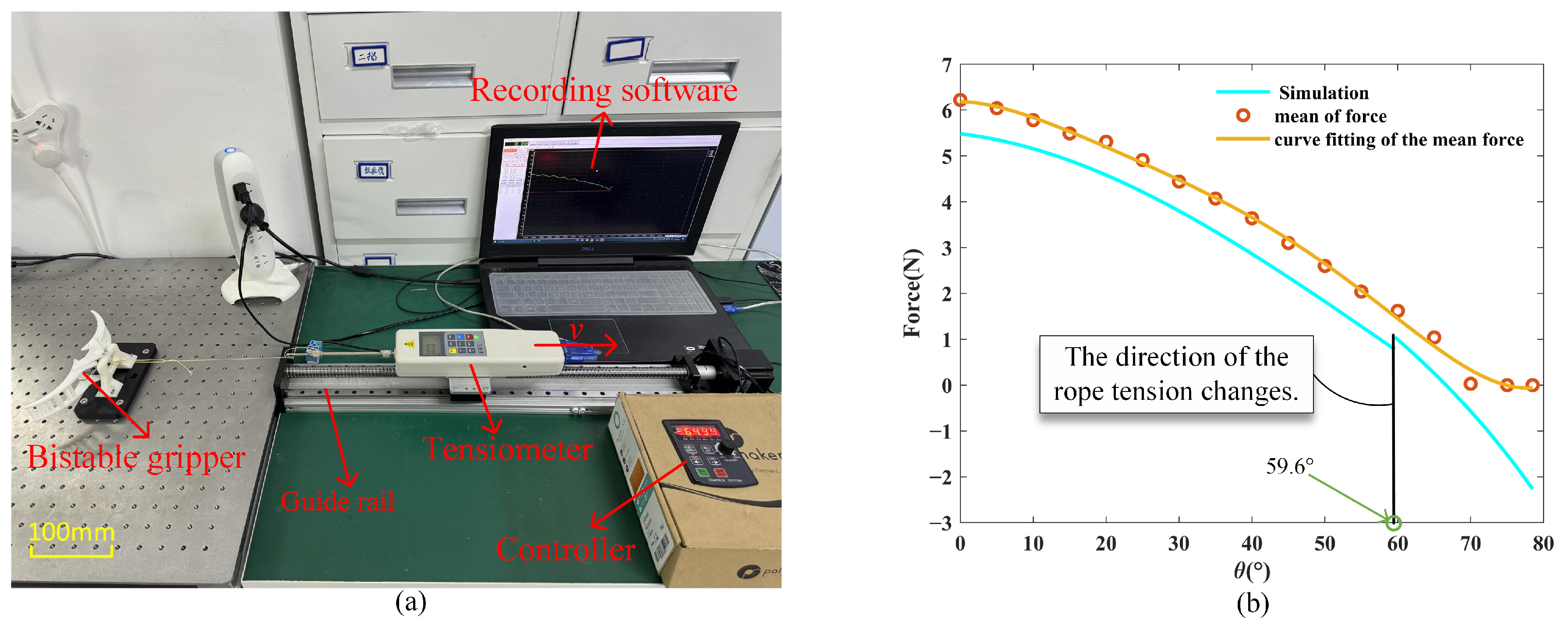
4.2. The Experiment of Opening and Closing the Bistable Gripper
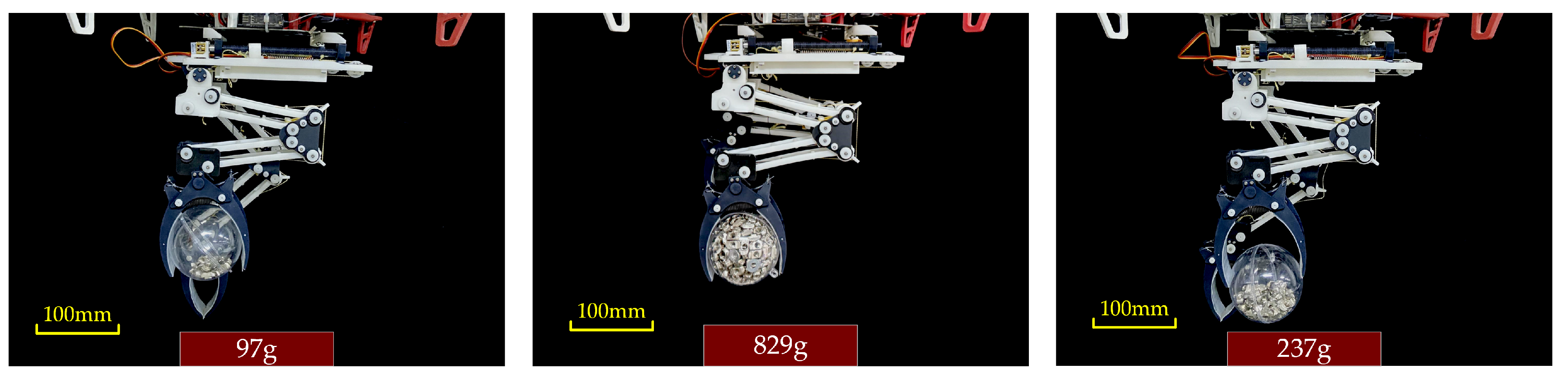
4.3. LCM Load-Bearing Capacity Test
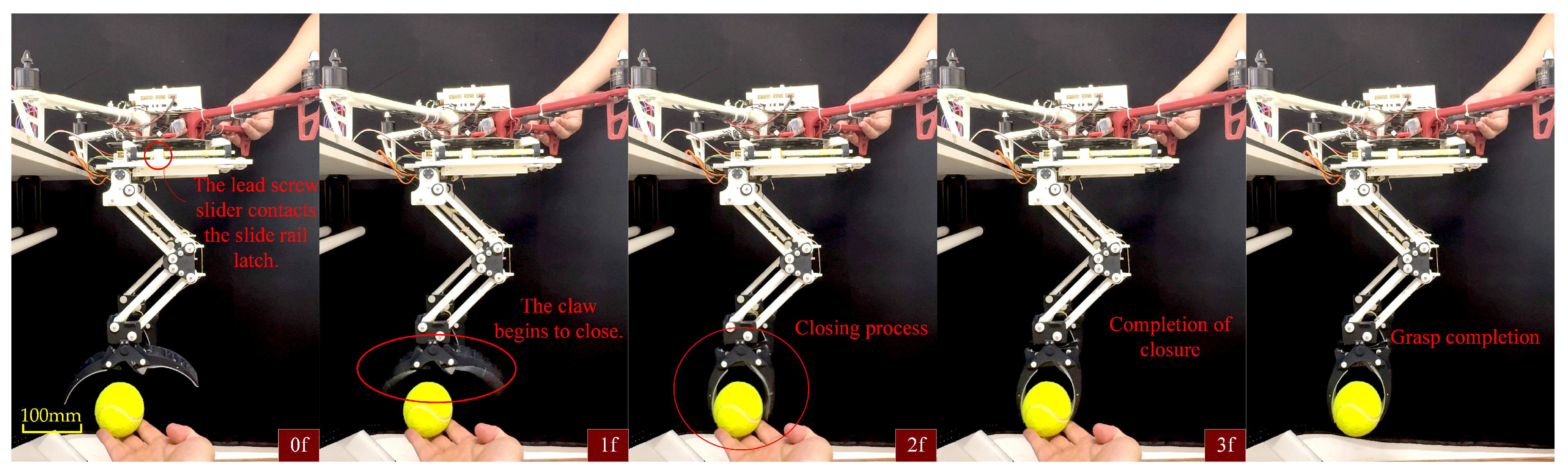
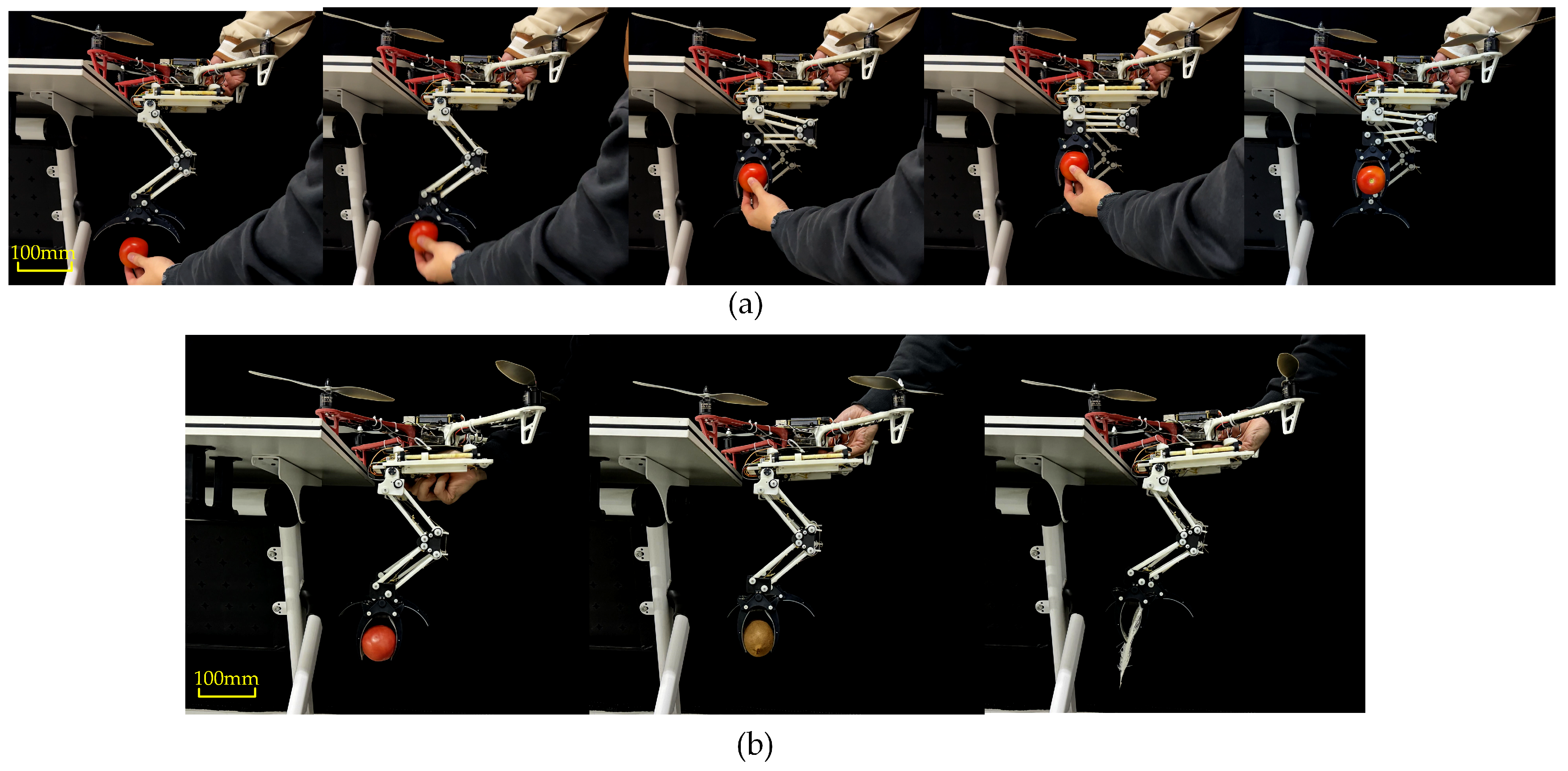
4.4. LCM Active Gripping Experiment
4.5. Perching Experiment
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Hsiao, Y.-H.; Bai, S.; Zhou, Y.; Jia, H.; Ding, R.; Chen, Y.; Wang, Z.; Chirarattananon, P. Energy Efficient Perching and Takeoff of a Miniature Rotorcraft. Commun. Eng. 2023, 2, 38. [Google Scholar] [CrossRef]
- Tsukagoshi, H.; Osada, Y. Soft Hybrid Suction Cup Capable of Sticking to Various Objects and Environments. Actuators 2021, 10, 50. [Google Scholar] [CrossRef]
- Liu, S.; Dong, W.; Ma, Z.; Sheng, X. Adaptive Aerial Grasping and Perching with Dual Elasticity Combined Suction Cup. IEEE Robot. Autom. Lett. 2020, 5, 4766–4773. [Google Scholar] [CrossRef]
- Jiang, H.; Pope, M.T.; Hawkes, E.W.; Christensen, D.L.; Estrada, M.A.; Parlier, A.; Tran, R.; Cutkosky, M.R. Modeling the Dynamics of Perching with Opposed-Grip Mechanisms. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–7 June 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 3102–3108. [Google Scholar]
- Thomas, J.; Pope, M.; Loianno, G.; Hawkes, E.W.; Estrada, M.A.; Jiang, H.; Cutkosky, M.R.; Kumar, V. Aggressive Flight with Quadrotors for Perching on Inclined Surfaces. J. Mech. Robot. 2016, 8, 051007. [Google Scholar] [CrossRef]
- Pope, M.T.; Cutkosky, M.R. Thrust-Assisted Perching and Climbing for a Bioinspired UAV. In Biomimetic and Biohybrid Systems; Lepora, N.F., Mura, A., Mangan, M., Verschure, P.F.M.J., Desmulliez, M., Prescott, T.J., Eds.; Lecture Notes in Computer Science; Springer International Publishing: Cham, Switzerland, 2016; Volume 9793, pp. 288–296. ISBN 978-3-319-42416-3. [Google Scholar]
- Pope, M.T.; Kimes, C.W.; Jiang, H.; Hawkes, E.W.; Estrada, M.A.; Kerst, C.F.; Roderick, W.R.T.; Han, A.K.; Christensen, D.L.; Cutkosky, M.R. A Multimodal Robot for Perching and Climbing on Vertical Outdoor Surfaces. IEEE Trans. Robot. 2017, 33, 38–48. [Google Scholar] [CrossRef]
- Nguyen, H.-N.; Siddall, R.; Stephens, B.; Navarro-Rubio, A.; Kovac, M. A Passively Adaptive Microspine Grapple for Robust, Controllable Perching. In Proceedings of the 2019 2nd IEEE International Conference on Soft Robotics (RoboSoft), Seoul, Republic of Korea, 14–18 April 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 80–87. [Google Scholar]
- Hang, K.; Lyu, X.; Song, H.; Stork, J.A.; Dollar, A.M.; Kragic, D.; Zhang, F. Perching and Resting—A Paradigm for UAV Maneuvering with Modularized Landing Gears. Sci. Robot. 2019, 4, eaau6637. [Google Scholar] [CrossRef] [PubMed]
- Aucone, E.; Kirchgeorg, S.; Valentini, A.; Pellissier, L.; Deiner, K.; Mintchev, S. Drone-Assisted Collection of Environmental DNA from Tree Branches for Biodiversity Monitoring. Sci. Robot. 2023, 8, eadd5762. [Google Scholar] [CrossRef]
- Kim, S.; Choi, S.; Kim, H.J. Aerial Manipulation Using a Quadrotor with a Two DOF Robotic Arm. In Proceedings of the 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems, Tokyo, Japan, 3–7 November 2013; IEEE: Piscataway, NJ, USA, 2013; pp. 4990–4995. [Google Scholar]
- Zhao, R.; Li, X.; Chen, J. Eagle-Inspired Manipulator with Adaptive Grasping and Collapsible Mechanism and Modular DOF for UAV Operations. Comput. Electron. Agric. 2023, 215, 108344. [Google Scholar] [CrossRef]
- Chen, T.G.; Hoffmann, K.A.W.; Low, J.E.; Nagami, K.; Lentink, D.; Cutkosky, M.R. Aerial Grasping and the Velocity Sufficiency Region. IEEE Robot. Autom. Lett. 2022, 7, 10009–10016. [Google Scholar] [CrossRef]
- Guo, X.; Tang, W.; Qin, K.; Zhong, Y.; Xu, H.; Qu, Y.; Li, Z.; Sheng, Q.; Gao, Y.; Yang, H.; et al. Powerful UAV Manipulation via Bioinspired Self-Adaptive Soft Self-Contained Gripper. Sci. Adv. 2024, 10, eadn6642. [Google Scholar] [CrossRef] [PubMed]
- Tang, W.; Zhong, Y.; Xu, H.; Qin, K.; Guo, X.; Hu, Y.; Zhu, P.; Qu, Y.; Yan, D.; Li, Z.; et al. Self-Protection Soft Fluidic Robots with Rapid Large-Area Self-Healing Capabilities. Nat. Commun. 2023, 14, 6430. [Google Scholar] [CrossRef] [PubMed]
- Nagendran, A.; Crowther, W.; Richardson, R. Biologically Inspired Legs for UAV Perched Landing. IEEE Aerosp. Electron. Syst. Mag. 2012, 27, 4–13. [Google Scholar] [CrossRef]
- Doyle, C.E.; Bird, J.J.; Isom, T.A.; Kallman, J.C.; Bareiss, D.F.; Dunlop, D.J.; King, R.J.; Abbott, J.J.; Minor, M.A. An Avian-Inspired Passive Mechanism for Quadrotor Perching. IEEE/ASME Trans. Mechatron. 2013, 18, 506–517. [Google Scholar] [CrossRef]
- Nadan, P.M.; Lee, C.L. Computational Design of a Bird-Inspired Perching Landing Gear Mechanism. In Proceedings of the Volume 4A: Dynamics, Vibration, and Control; American Society of Mechanical Engineers: Pittsburgh, PA, USA, 2018; p. V04AT06A018. [Google Scholar]
- Nadan, P.M.; Anthony, T.M.; Michael, D.M.; Pflueger, J.B.; Sethi, M.S.; Shimazu, K.N.; Tieu, M.; Lee, C.L. A Bird-Inspired Perching Landing Gear System. J. Mech. Robot. 2019, 11, 061002. [Google Scholar] [CrossRef]
- Askari, M.; Shin, W.D.; Lenherr, D.; Stewart, W.; Floreano, D. Avian-Inspired Claws Enable Robot Perching or Walking. IEEE/ASME Trans. Mechatron. 2023, 29, 1856–1866. [Google Scholar] [CrossRef]
- Xie, P.; Ma, O.; Zhao, Z.; Zhang, L. A Bio-Inspired UAV Leg-Foot Mechanism for Landing, Grasping and Perching Tasks. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, Dallas, TX, USA, 22–26 June 2015; American Institute of Aeronautics and Astronautics: Kissimmee, FL, USA, 2015. [Google Scholar]
- Zhang, H.; Sun, J.; Zhao, J. Compliant Bistable Gripper for Aerial Perching and Grasping. In Proceedings of the 2019 International Conference on Robotics and Automation (ICRA), Montreal, QC, Canada, 20–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1248–1253. [Google Scholar]
- Zhang, H.; Lerner, E.; Cheng, B.; Zhao, J. Compliant Bistable Grippers Enable Passive Perching for Micro Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2021, 26, 2316–2326. [Google Scholar] [CrossRef]
- Hsiao, H.; Sun, J.; Zhang, H.; Zhao, J. A Mechanically Intelligent and Passive Gripper for Aerial Perching and Grasping. IEEE/ASME Trans. Mechatron. 2022, 27, 5243–5253. [Google Scholar] [CrossRef]
- Liu, J.; Zhang, D.; Wu, C.; Tang, H.; Tian, C. A Multi-Finger Robot System for Adaptive Landing Gear and Aerial Manipulation. Robot. Auton. Syst. 2021, 146, 103878. [Google Scholar] [CrossRef]
- McLaren, A.; Fitzgerald, Z.; Gao, G.; Liarokapis, M. A Passive Closing, Tendon Driven, Adaptive Robot Hand for Ultra-Fast, Aerial Grasping and Perching. In Proceedings of the 2019 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Macau, China, 3–8 November 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 5602–5607. [Google Scholar]
- Roderick, W.R.T.; Cutkosky, M.R.; Lentink, D. Bird-Inspired Dynamic Grasping and Perching in Arboreal Environments. Sci. Robot. 2021, 6, eabj7562. [Google Scholar] [CrossRef] [PubMed]
- Firouzeh, A.; Lee, J.; Yang, H.; Lee, D.; Cho, K.-J. Perching and Grasping Using a Passive Dynamic Bioinspired Gripper. IEEE Trans. Robot. 2024, 40, 213–225. [Google Scholar] [CrossRef]
- Galton, P.M.; Shepherd, J.D. Experimental Analysis of Perching in the European Starling (Sturnus vulgaris: Passeriformes; Passeres), and the Automatic Perching Mechanism of Birds. J. Exp. Zool. 2012, 317, 205–215. [Google Scholar] [CrossRef]
- Abourachid, A.; Höfling, E. The Legs: A Key to Bird Evolutionary Success. J. Ornithol. 2012, 153, 193–198. [Google Scholar] [CrossRef]
- Quinn, T.H.; Baumel, J.J. The Digital Tendon Locking Mechanism of the Avian Foot (Aves). Zoomorphology 1990, 109, 281–293. [Google Scholar] [CrossRef]
- Quinn, T.H.; Baumel, J.J. Chiropteran Tendon Locking Mechanism. J. Morphol. 1993, 216, 197–208. [Google Scholar] [CrossRef] [PubMed]
- Roderick, W.R.; Chin, D.D.; Cutkosky, M.R.; Lentink, D. Birds Land Reliably on Complex Surfaces by Adapting Their Foot-Surface Interactions upon Contact. eLife 2019, 8, e46415. [Google Scholar] [CrossRef] [PubMed]
- Pamfilie, A.M.; Garner, A.M.; Russell, A.P.; Dhinojwala, A.; Niewiarowski, P.H. Get to the Point: Claw Morphology Impacts Frictional Interactions on Rough Substrates. Zoology 2023, 157, 126078. [Google Scholar] [CrossRef] [PubMed]
- Tang, W.; Lin, Y.; Zhang, C.; Liang, Y.; Wang, J.; Wang, W.; Ji, C.; Zhou, M.; Yang, H.; Zou, J. Self-Contained Soft Electrofluidic Actuators. Sci. Adv. 2021, 7, eabf8080. [Google Scholar] [CrossRef] [PubMed]
- Qin, K.; Tang, W.; Zhong, Y.; Liu, Y.; Xu, H.; Zhu, P.; Yan, D.; Yang, H.; Zou, J. An Aerial–Aquatic Robot with Tunable Tilting Motors Capable of Multimode Motion. Adv. Intell. Syst. 2023, 5, 2300193. [Google Scholar] [CrossRef]





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Experimental Materials | Passive Grasping Success Rate | Active Grasping Success Rate |
|---|---|---|
| Tomato | 75% | 100% |
| Kiwi | 80% | 100% |
| Feather | - | 100% |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Xiang, R.; Li, H.; Wang, C.; Zhang, J.; Liu, X.; Hao, Y. Design and Validation of a Biomimetic Leg-Claw Mechanism Capable of Perching and Grasping for Multirotor Drones. Biomimetics 2025, 10, 10. https://doi.org/10.3390/biomimetics10010010
Zhao Y, Xiang R, Li H, Wang C, Zhang J, Liu X, Hao Y. Design and Validation of a Biomimetic Leg-Claw Mechanism Capable of Perching and Grasping for Multirotor Drones. Biomimetics. 2025; 10(1):10. https://doi.org/10.3390/biomimetics10010010
Chicago/Turabian StyleZhao, Yan, Ruzhi Xiang, Hui Li, Chang Wang, Jianhua Zhang, Xuan Liu, and Yufei Hao. 2025. "Design and Validation of a Biomimetic Leg-Claw Mechanism Capable of Perching and Grasping for Multirotor Drones" Biomimetics 10, no. 1: 10. https://doi.org/10.3390/biomimetics10010010
APA StyleZhao, Y., Xiang, R., Li, H., Wang, C., Zhang, J., Liu, X., & Hao, Y. (2025). Design and Validation of a Biomimetic Leg-Claw Mechanism Capable of Perching and Grasping for Multirotor Drones. Biomimetics, 10(1), 10. https://doi.org/10.3390/biomimetics10010010