
Feature Extraction Method of Rolling Bearing Fault Signal Based on EEMD and Cloud Model Characteristic Entropy


Abstract
:1. Introduction
2. AE Signal Feature Extraction Theory of Rolling Bearing
2.1. EEMD Algorithm
- (1)
- The overall average time M and the standard deviation of white noise k are set.
- (2)
- The EMD experiments are performed m times after adding white noise.
- (2.1)
- After a random Gaussian white noise nm(t) is added into the input signal x(t), signal xm(t) is obtained as follows:
- (2.2)
- xm(t) is decomposed by EMD to obtain cj,m, which indicates that j IMF is obtained in the m-th decomposition (j = 1, 2, …, Nm). Nm denotes the number of IMF in the m-th decomposition.
- (2.3)
- If m < M, then let m = m + 1 and return to (2.2).
- (2.4)
- Take the minimum number of model components in each IMF group, which is obtained in M times decomposition as the final overall average number of IMF.
- (3)
- Each IMF in m times decomposition is averaged as follows:
- (4)
- is outputted as the j-th IMF obtained after EEMD decomposition. The added white noise nm(t) is generated randomly in each experiment. When the value of M is large, the overall average of the added Gaussian white noise is close to zero.
2.2. MI Algorithm
2.3. Cloud Model Algorithm and CMCE
2.3.1. Cloud Model Algorithm
- (1)
- Sample mean is obtained according to sample point xi, The first order of the sample absolute center distance is , and sample variance is .
- (2)
- Calculate the expected value as follows.
- (3)
- Calculate CMCE as follows.
- (4)
- Calculate hyper entropy as follows.
- (1)
- Generate a normal random number En′ with expected value En and standard deviation He.
- (2)
- Generate a normal random number “x” with expected value Ex and standard deviation En′.
- (3)
- Calculate
- (4)
- X is a cloud droplet of the universe, and y is the certainty degree.
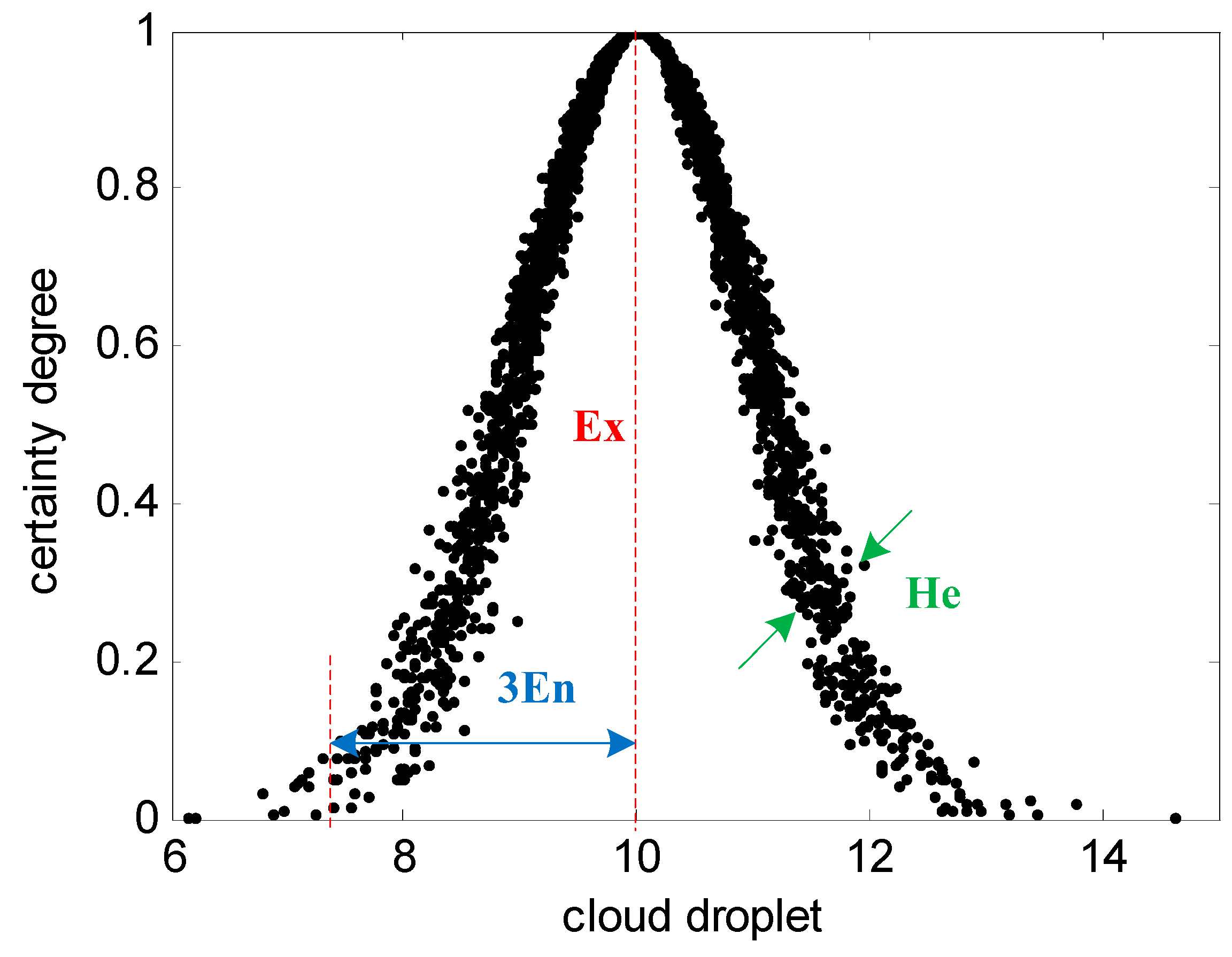
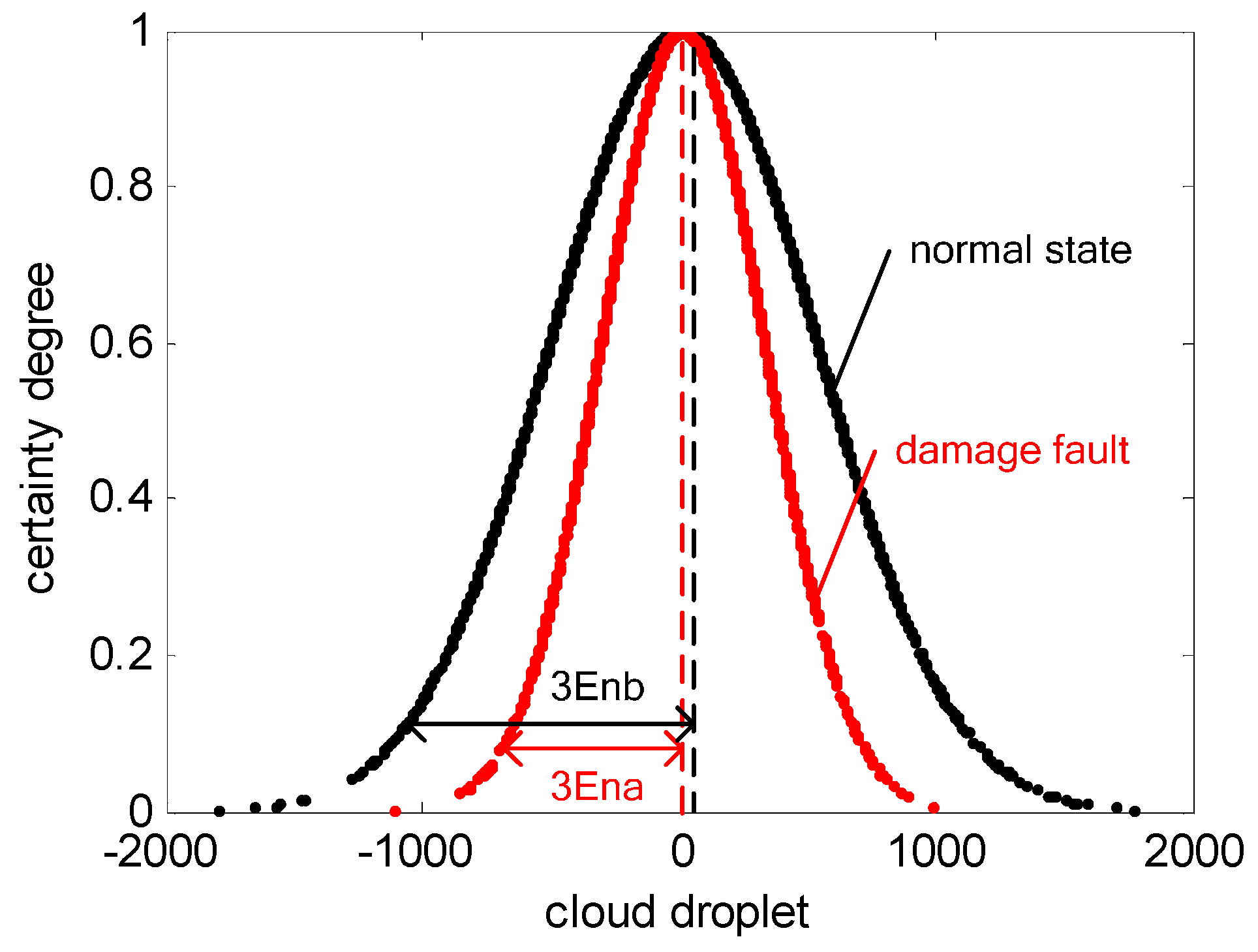
- (5)
- Repeat Steps (1)–(4) until the required number of cloud droplets is generated. The schematic of the final cloud model is shown in Figure 1.

2.3.2. CMCE
2.4. Signal Feature Extraction Method Based on EEMD and CMCE
- (1)
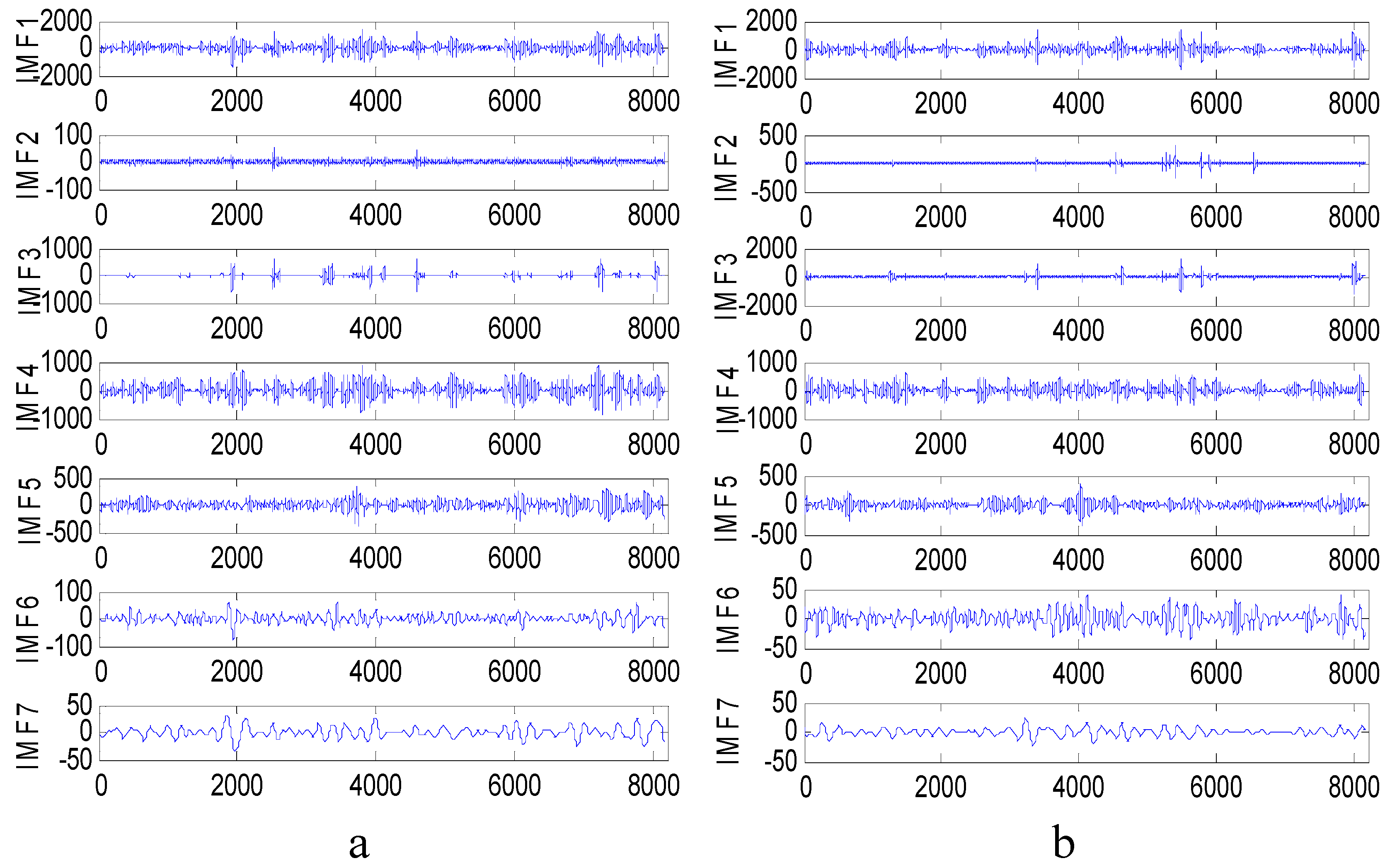
- IMFj (j = 1, 2, …, n) is obtained by decomposing the collected AE signals calculated by the EEMD algorithm.
- (2)
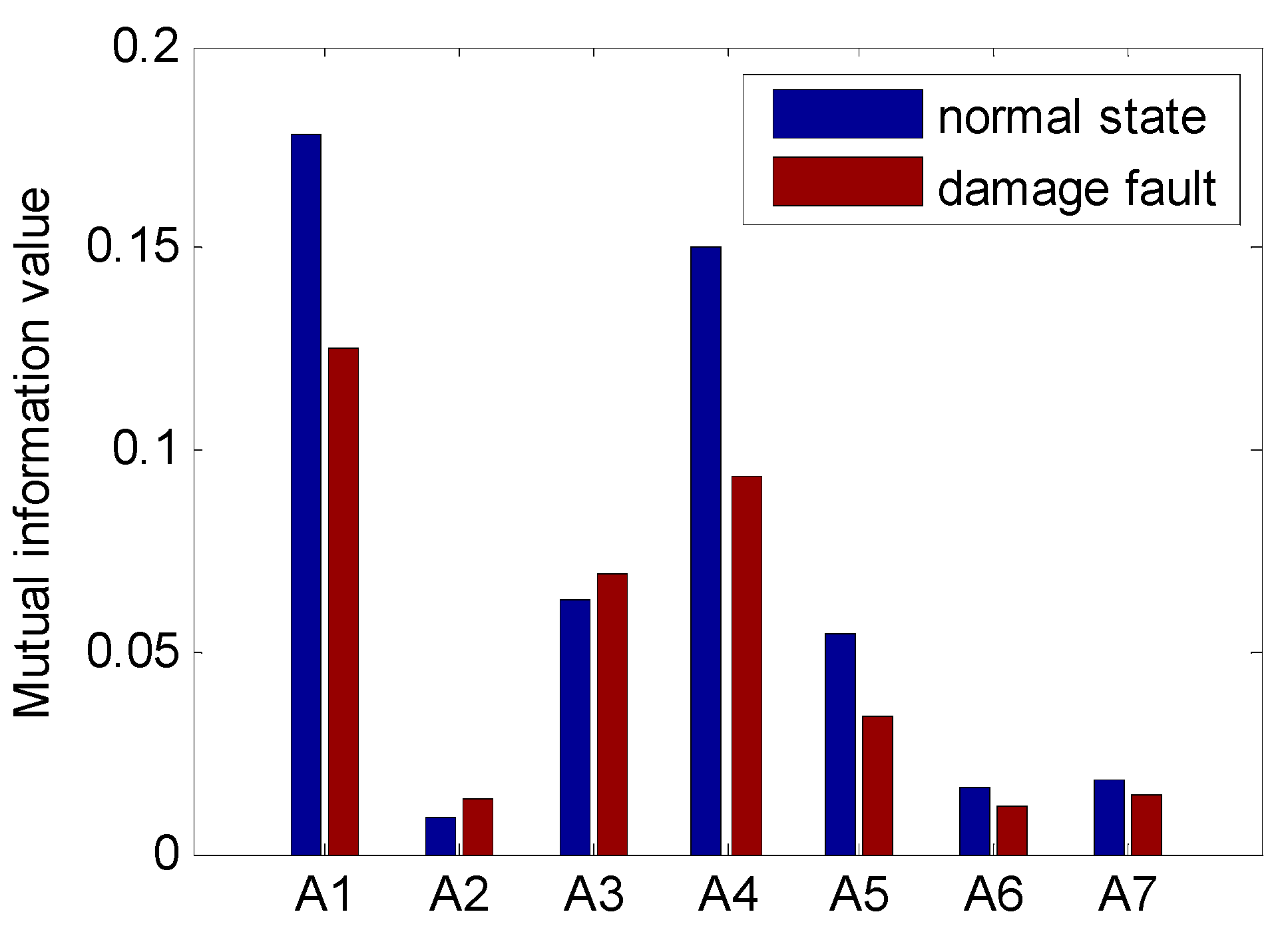
- All MI values between all IMFj and the original signal by the MI algorithm are calculated. Sensitive IMFs are selected according to MI threshold.
- (3)
- The selected sensitive IMFs are used to reconstruct signals.
- (4)
- CMCE as the eigenvalue is calculated using the backward cloud generator to reconstruct signals.
3. Experimental Verification and Result Analysis
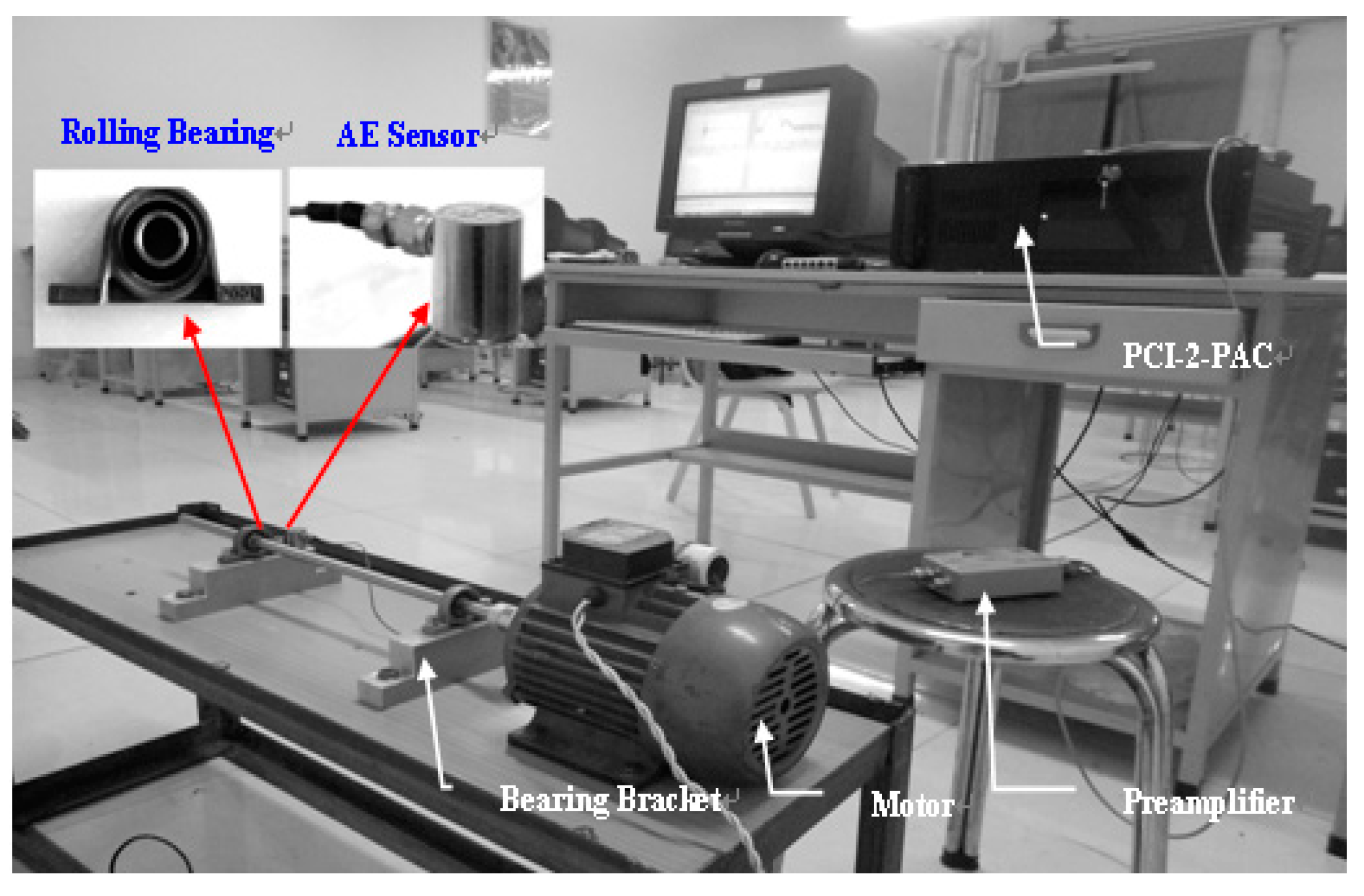
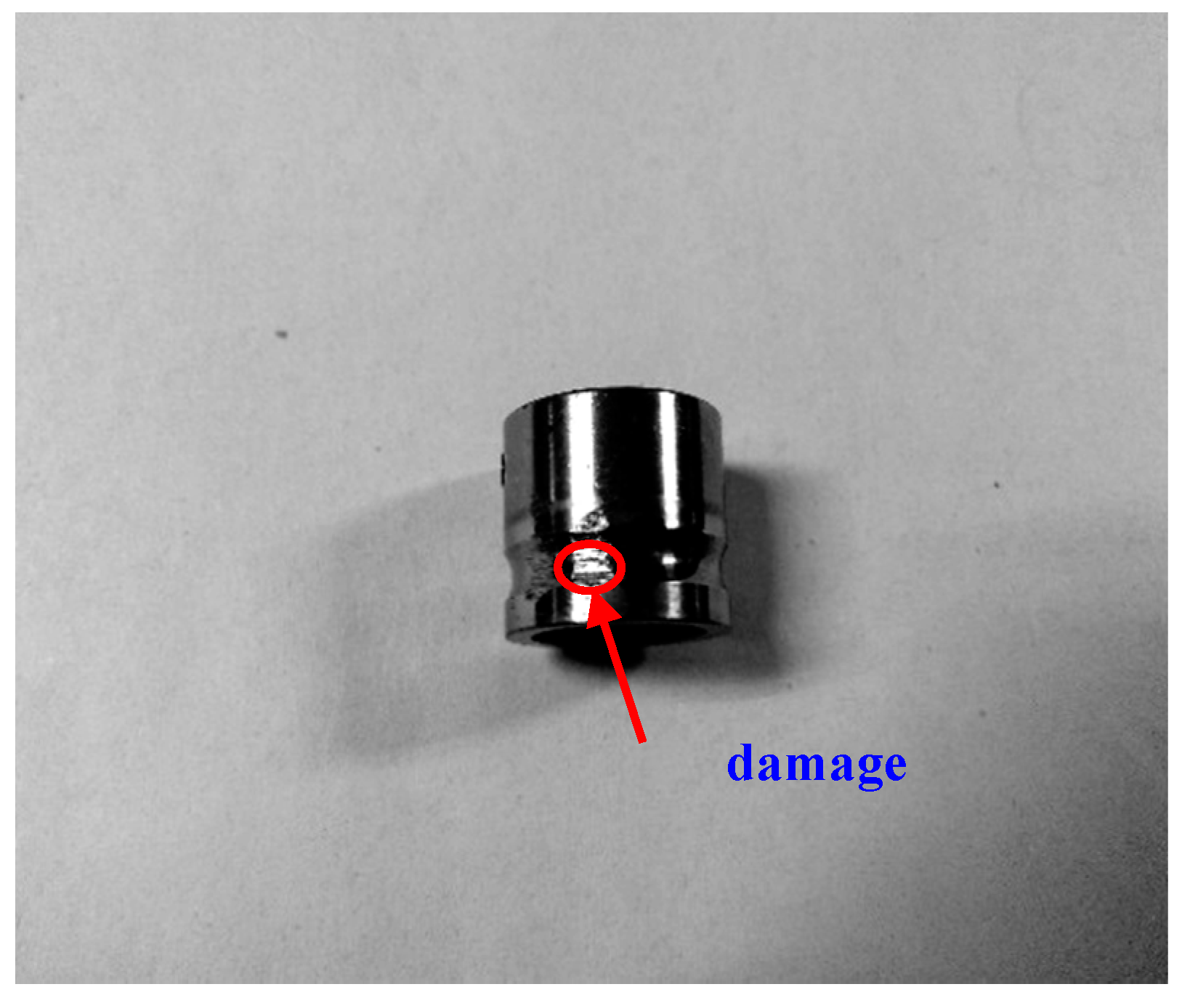
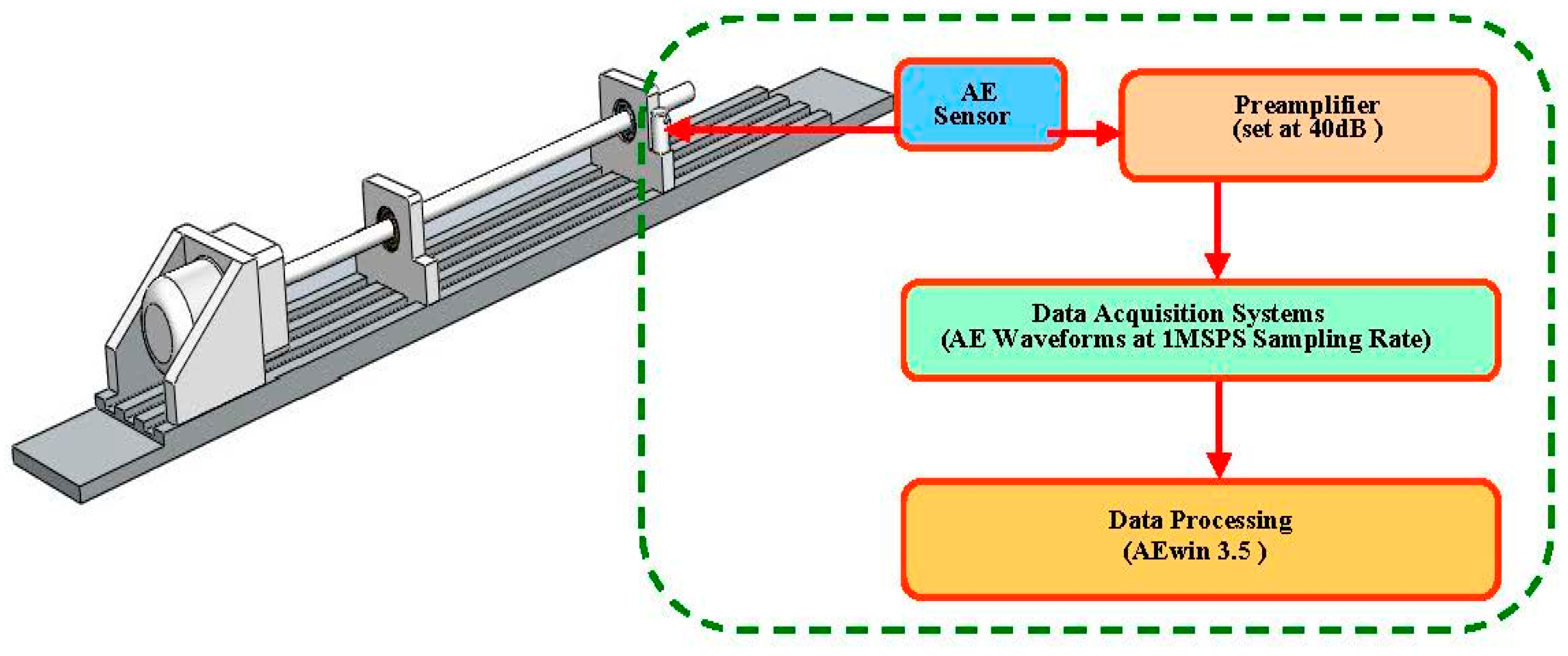
3.1. Design and Layout of Test Rig


3.2. Instrumentation

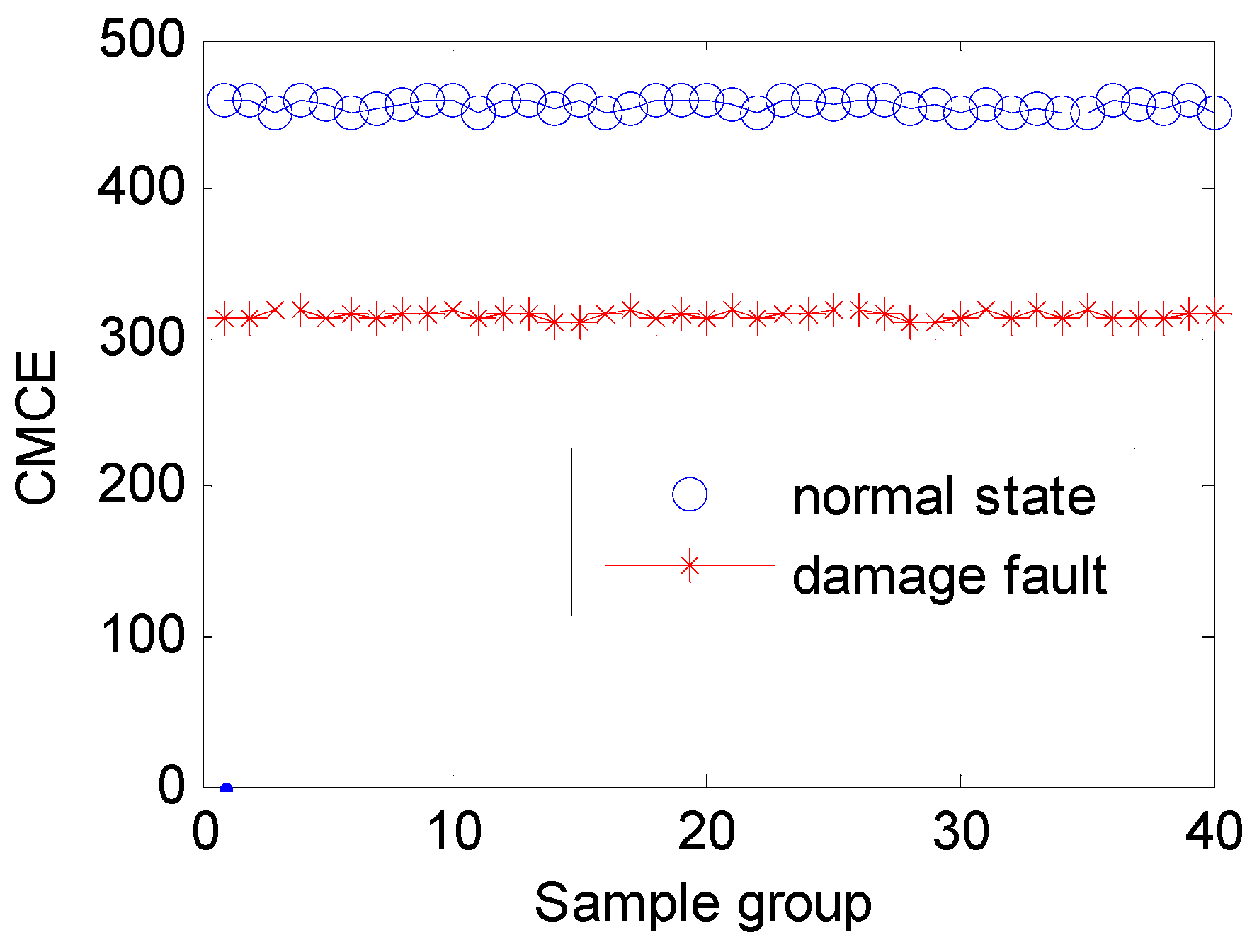
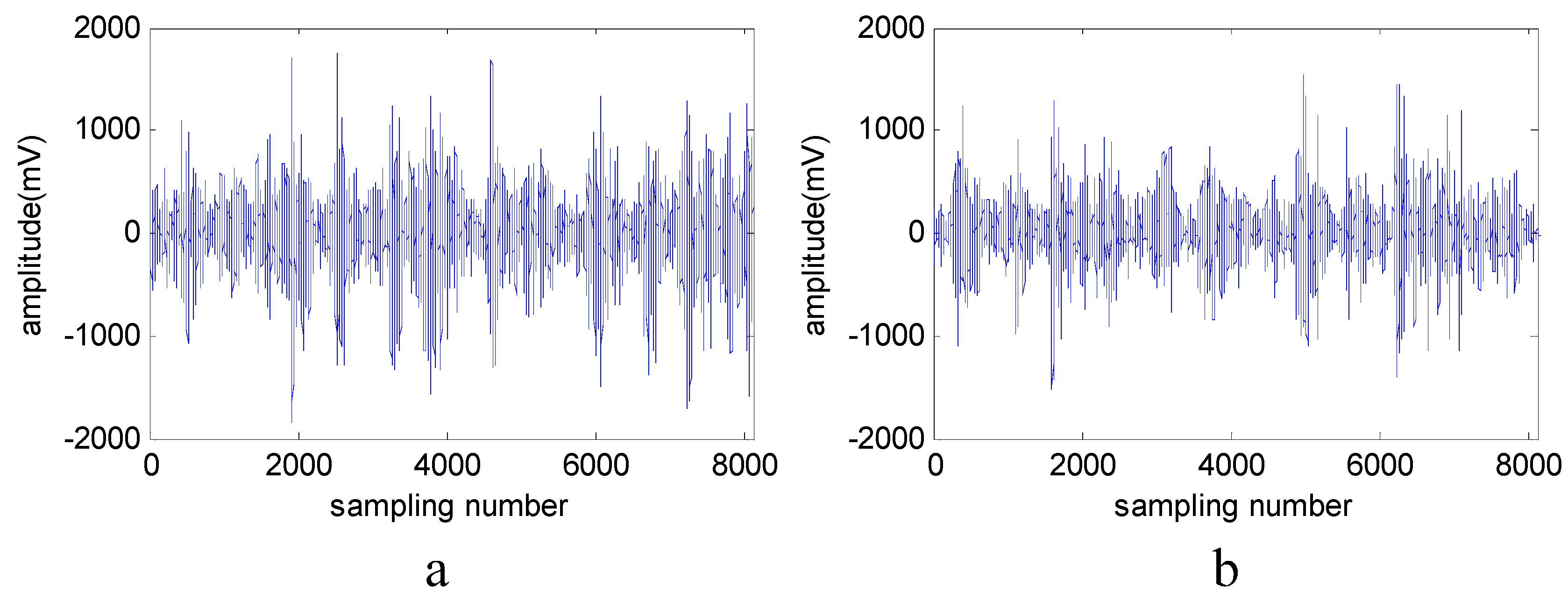
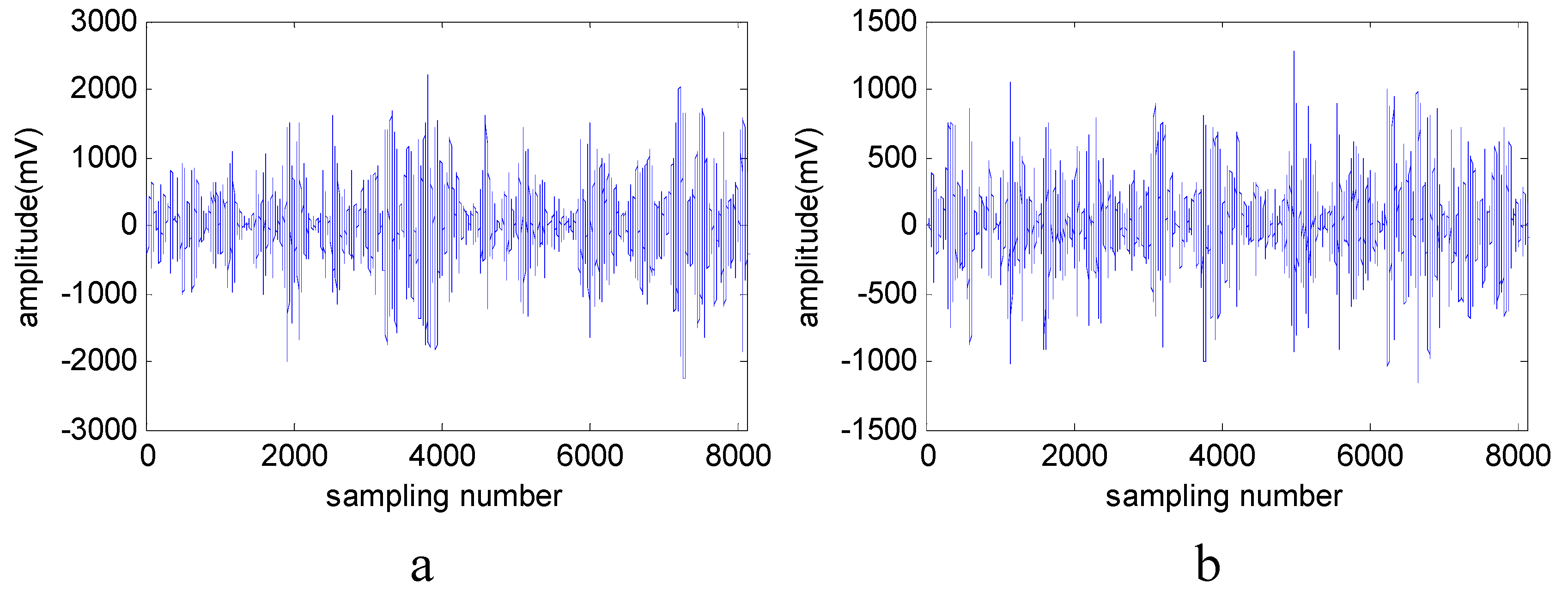
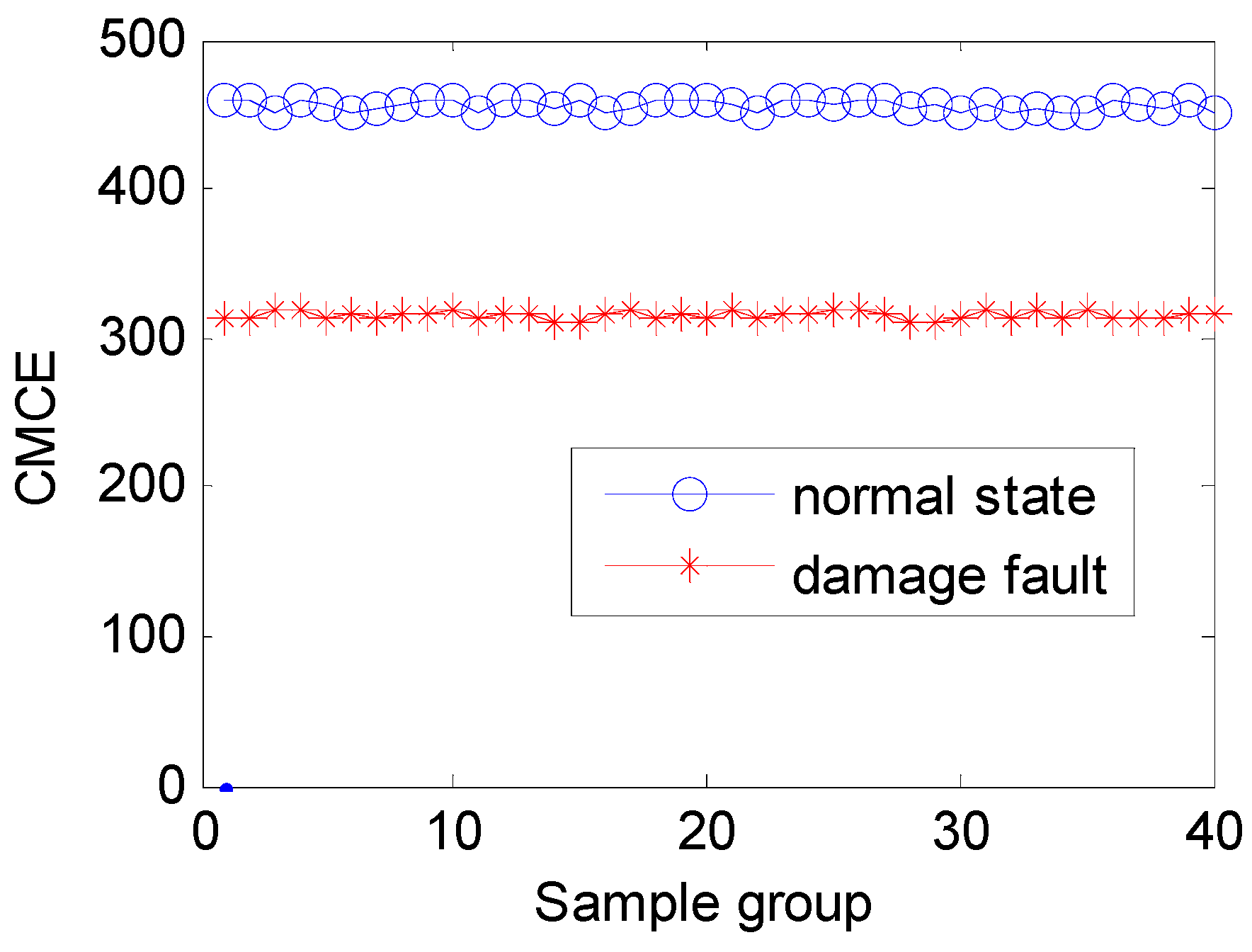
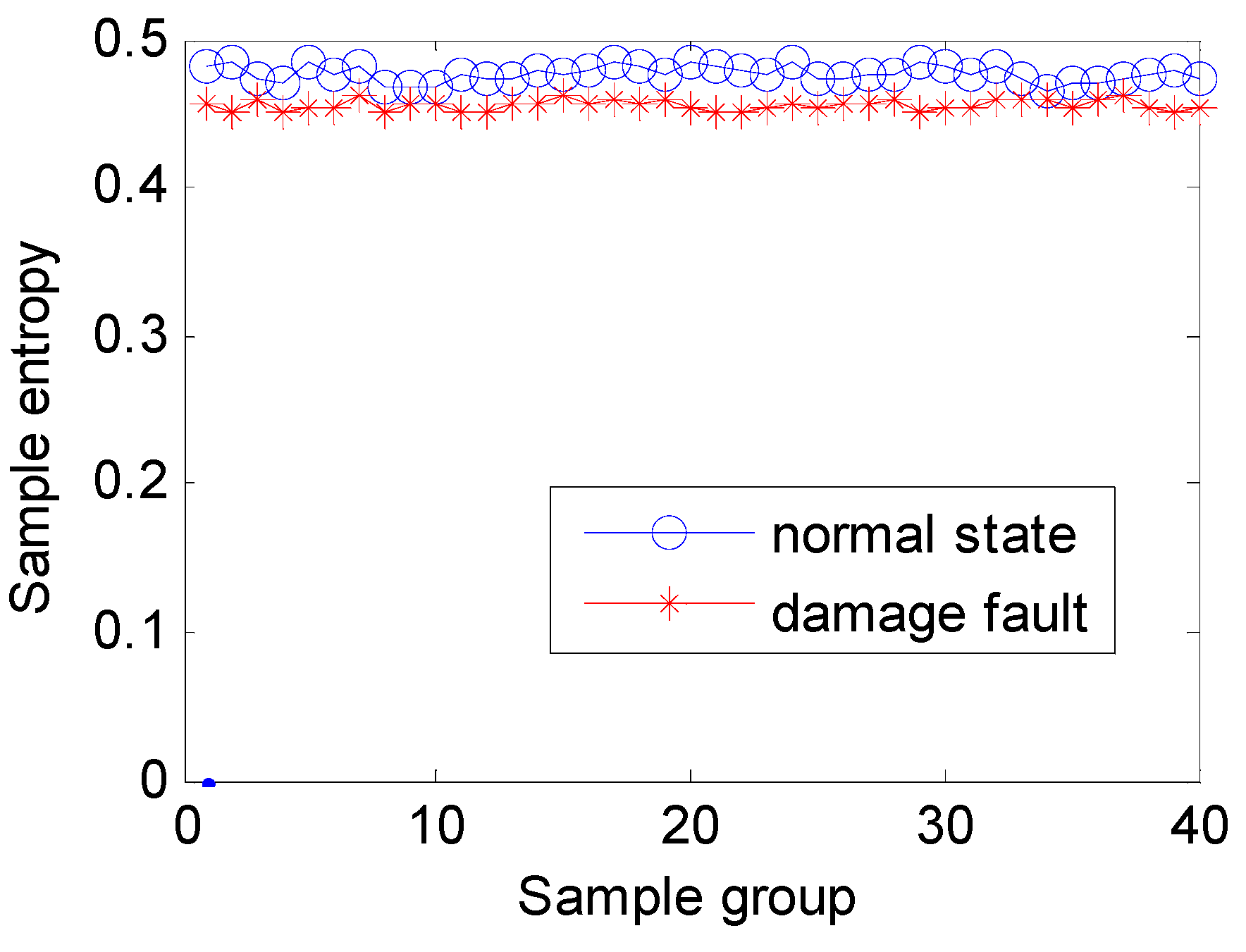
3.3. Feature Extraction of Two Kinds of Signals








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Accuracy % | ||
|---|---|---|
| Method | KNN | SVM |
| EEMD–CMCE | 96.2 | 97.5 |
| EEMD–SampEn | 83.4 | 88.7 |
4. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
References
- Li, B.Y.; Feng, J.L.; Dai, G.; Li, W. Progress in the study of acoustic emission for evaluation of pitting corrosion in metal. Tech. Acoust. 2005, 24, 170–172. [Google Scholar]
- Elforjani, M.; Mba, D. Monitoring the Onset and Propagation of Natural Degradation Process in a Slow Speed Rolling Element Bearing With Acoustic Emission. J. Vib. Acoust. 2008, 130, 1257–1261. [Google Scholar] [CrossRef]
- Al-Ghamdi, A.M.; Cole, P.; Such, R.; Mba, D. Estimation of bearing defect size with acoustic emission. Insight Non-Destr. Test. Cond. Monit. 2004, 46, 758–761. [Google Scholar] [CrossRef]
- Beck, P.; Bradshaw, T.P.; Lark, R.J.; Holford, K.M. A quantitative study of the relationship between concrete crack parameters and acoustic emission energy released during failure. Key Eng. Mater. 2003, 245–246, 461–466. [Google Scholar] [CrossRef]
- Kilundu, B.; Chiementin, X.; Duez, J.; Mba, D. Cyclostationarity of acoustic emissions (AE) for monitoring bearing defects. Mech. Syst. Signal Process. 2011, 25, 2061–2072. [Google Scholar] [CrossRef]
- Xu, F.; Liu, Y. Feature Extraction and Classification Method of Acoustic Emission Signals Generated from Plywood Damage Based on EMD-SVD. J. Basic Sci. Eng. 2014, 22, 1238–1247. [Google Scholar]
- Wu, Z.H.; Huang, N.E. Ensemble empirical mode decomposition: A noise assisted data analysis method. Adv. Adapt. Data Anal. 2009, 1, 1–41. [Google Scholar] [CrossRef]
- Yan, R.; Gao, R.X. Approximate entropy as a diagnostic tool for machine health monitoring. Mech. Syst. Signal Process. 2007, 21, 824–839. [Google Scholar] [CrossRef]
- Su, W.; Wang, F.; Zhu, H.; Guo, Z.; Zhang, Z.; Zhang, H. Feature extraction of rolling element bearing fault using wavelet packet sample entropy. J. Vib. Meas. Diagn. 2011, 31, 162–166. [Google Scholar]
- Li, D.Y.; Liu, C.Y.; Gan, W.Y. A new cognitive model: Cloud model. Int. J. Intell. Syst. 2009, 24, 357–375. [Google Scholar] [CrossRef]
- Li, H.L.; Guo, C.H. Piecewise aggregate approximation method based on cloud model for time series. Control Decis. 2011, 26, 1525–1529. [Google Scholar]
- Yu, N.H.; Li, L.F.; Wang, L. Abnormal Detection for Harmonic Currents Based on Cloud Model (In Chinese). CSEE Proc. 2014, 34, 4395–4401. [Google Scholar]
- Liu, H.J.; Liu, Z.; Jiang, W.L. A Method for Emitter Recognition Based on Cloud Model. J. Electron. Inf. Technol. 2009, 31, 2079–2083. [Google Scholar]
- Xu, H.J.; Wang, Z.Y.; Su, H.Y. Dissolved gas analysis based feedback cloud entropy model for power transformer fault diagnosis. Power Syst. Prot. Control 2013, 41, 115–119. [Google Scholar]
- Dang, Q.; Luo, J.W.; Wang, D. Research of anomaly detection algorithm based on cloud theory. Appl. Res. Comput. 2009, 26, 3724–3726. [Google Scholar]
- Zhang, J.; Yan, R.; Gao, R.X. Performance Enhancement of Ensemble Empirical Mode Decomposition. Mech. Syst. Signal Process. 2010, 2, 1018–1026. [Google Scholar] [CrossRef]
- Shen, Y.; Wang, L.; Zhao, Z. Fault diagnosis for rolling bearing of wind turbine based on improved HHT. Meas. Control Technol. 2013, 32, 40–44. [Google Scholar]
- Li, D.Y.; Du, Y. Artificial Intelligence with Uncertainty; National Defense Industry Press: Beijing, China, 2005; pp. 143–185. [Google Scholar]
- Albert, A.-P.; Nii, A.-O. A criterion for selecting relevant intrinsic mode functions in empirical mode decomposition. Adv. Adapt. Data Anal. 2011, 2. [Google Scholar] [CrossRef]
- Yuan, S.; Chu, F. Support vector machines and its application in machine fault diagnosis. J. Vib. Shock 2007, 26, 29–35. [Google Scholar]
- Salzberg, S.L. On comparing classifiers: Pitfalls to avoid and a recommended approach. Data Min. Knowl. Discov. 1997, 1, 317–328. [Google Scholar] [CrossRef]
- Zhu, B.; Yang, J.; Lv, W.; Chen, L.; Ma, Y.; Yao, W.; Zhang, Y. Ground-based visible cloud image classification methodbased on KNN algorithm. J. Appl. Meteorol. Sci. 2012, 23, 721–728. [Google Scholar]
© 2015 by the authors; licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Han, L.; Li, C.; Liu, H. Feature Extraction Method of Rolling Bearing Fault Signal Based on EEMD and Cloud Model Characteristic Entropy. Entropy 2015, 17, 6683-6697. https://doi.org/10.3390/e17106683
Han L, Li C, Liu H. Feature Extraction Method of Rolling Bearing Fault Signal Based on EEMD and Cloud Model Characteristic Entropy. Entropy. 2015; 17(10):6683-6697. https://doi.org/10.3390/e17106683
Chicago/Turabian StyleHan, Long, Chengwei Li, and Hongchen Liu. 2015. "Feature Extraction Method of Rolling Bearing Fault Signal Based on EEMD and Cloud Model Characteristic Entropy" Entropy 17, no. 10: 6683-6697. https://doi.org/10.3390/e17106683
APA StyleHan, L., Li, C., & Liu, H. (2015). Feature Extraction Method of Rolling Bearing Fault Signal Based on EEMD and Cloud Model Characteristic Entropy. Entropy, 17(10), 6683-6697. https://doi.org/10.3390/e17106683