Efficient Low-PAR Waveform Design Method for Extended Target Estimation Based on Information Theory in Cognitive Radar


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
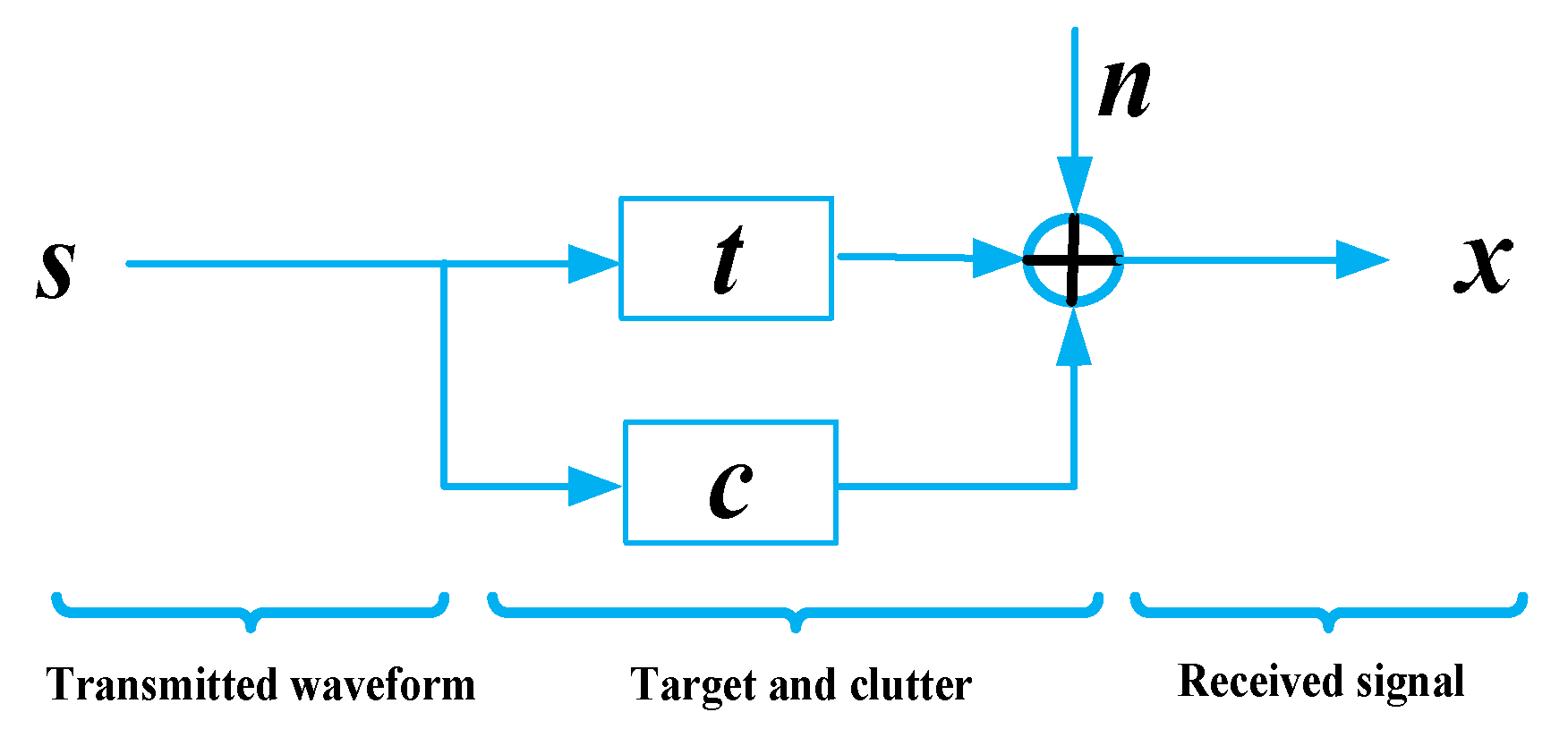
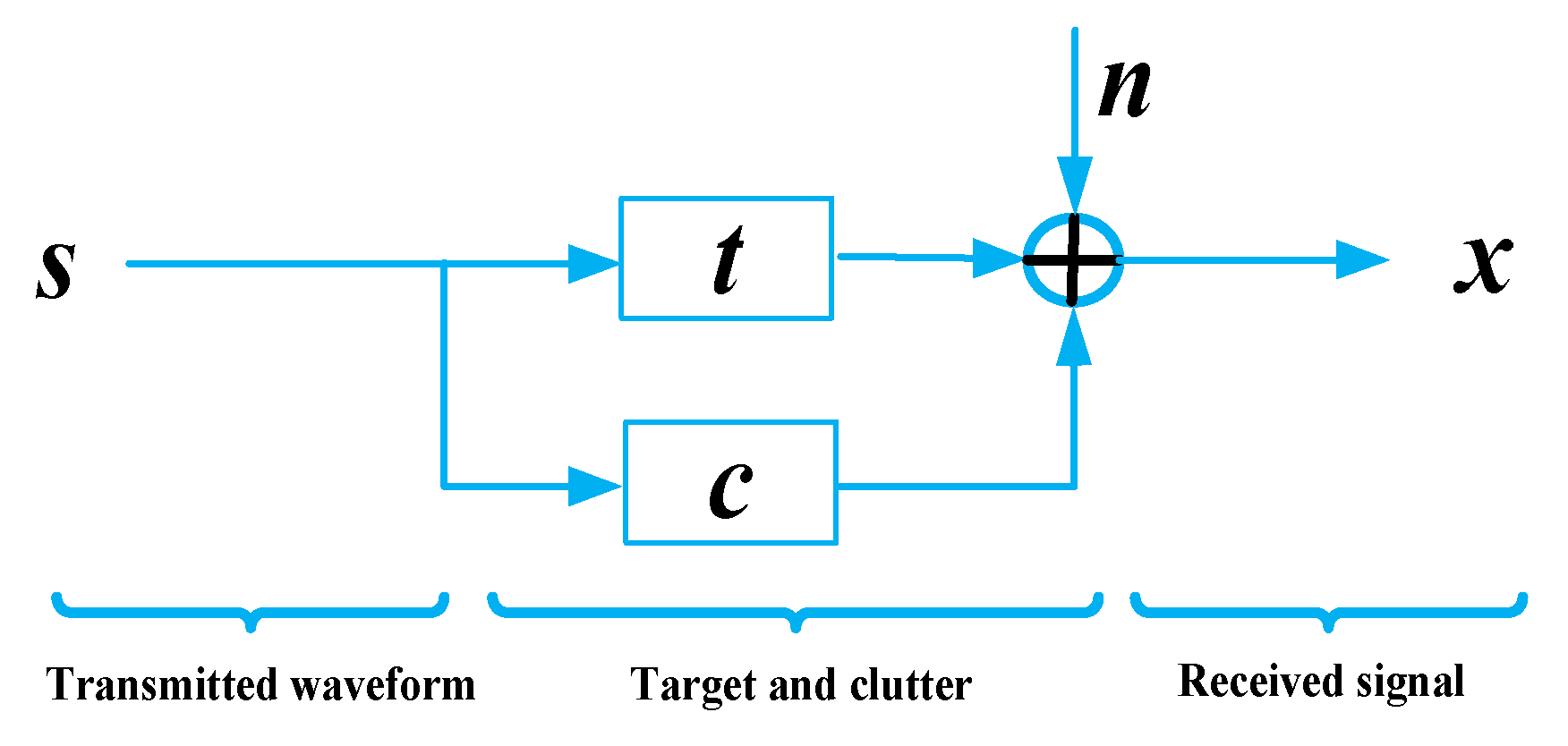
2. Signal Model
3. Waveform Design Method
3.1. MM Method
3.2. Problem Formulation
3.3. Waveform Design
3.4. A Fast Optimization Method
- Step 0:
- Set , generate a random waveform , initialize the and .
- Step 1:
- Use (28) to update , and ;
- Step 2:
- Use (30) and (31) to update and ;
- Step 3:
- Use (32) to update , ;
- Step 4:
- , use (35) to update , ;
- Step 5:
- Get from the first entries of ;
- Step 6:
- Solve to update , set ;
- Step 7:
- Go back to step 1 until or the iteration number is larger than .
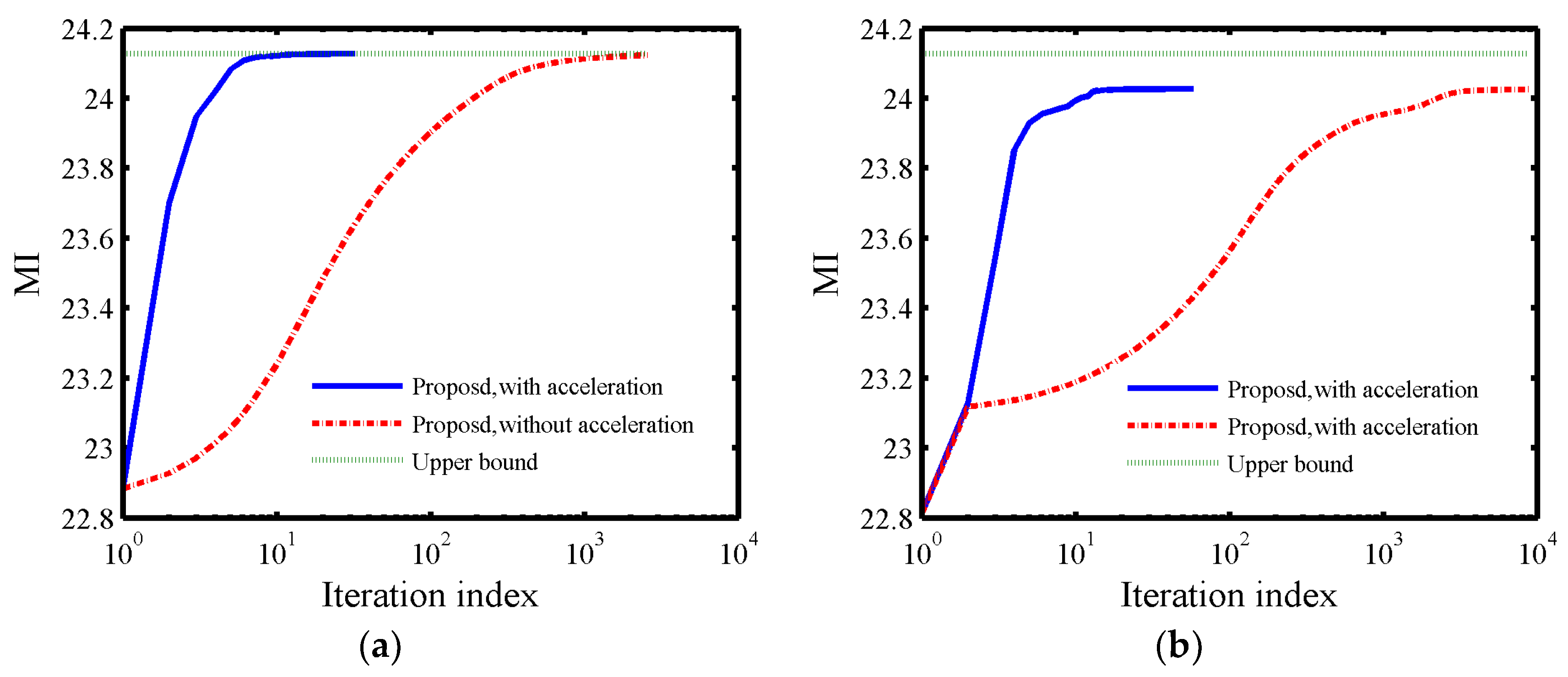
3.5. Acceleration Scheme
- Step 0:
- Set k = 0, generate a random waveform sk, initialize the τ and γ;
- Step 1:
- ;
- Step 2:
- ;
- Step 3:
- ;
- Step 4:
- ;
- Step 5:
- ;
- Step 6:
- ;
- Step 7:
- Solve to P5 update sk+1;
- Step 8:
- while do
- Step 9:
- ;
- Step 10:
- ;
- Step 11:
- Solve P5 to update sk+1;
- Step 12:
- end while
- Step 13:
- Set k = k + 1;
- Step 14:
- Go back to step 1 until or the iteration number is larger than γ.
4. Performance Analysis
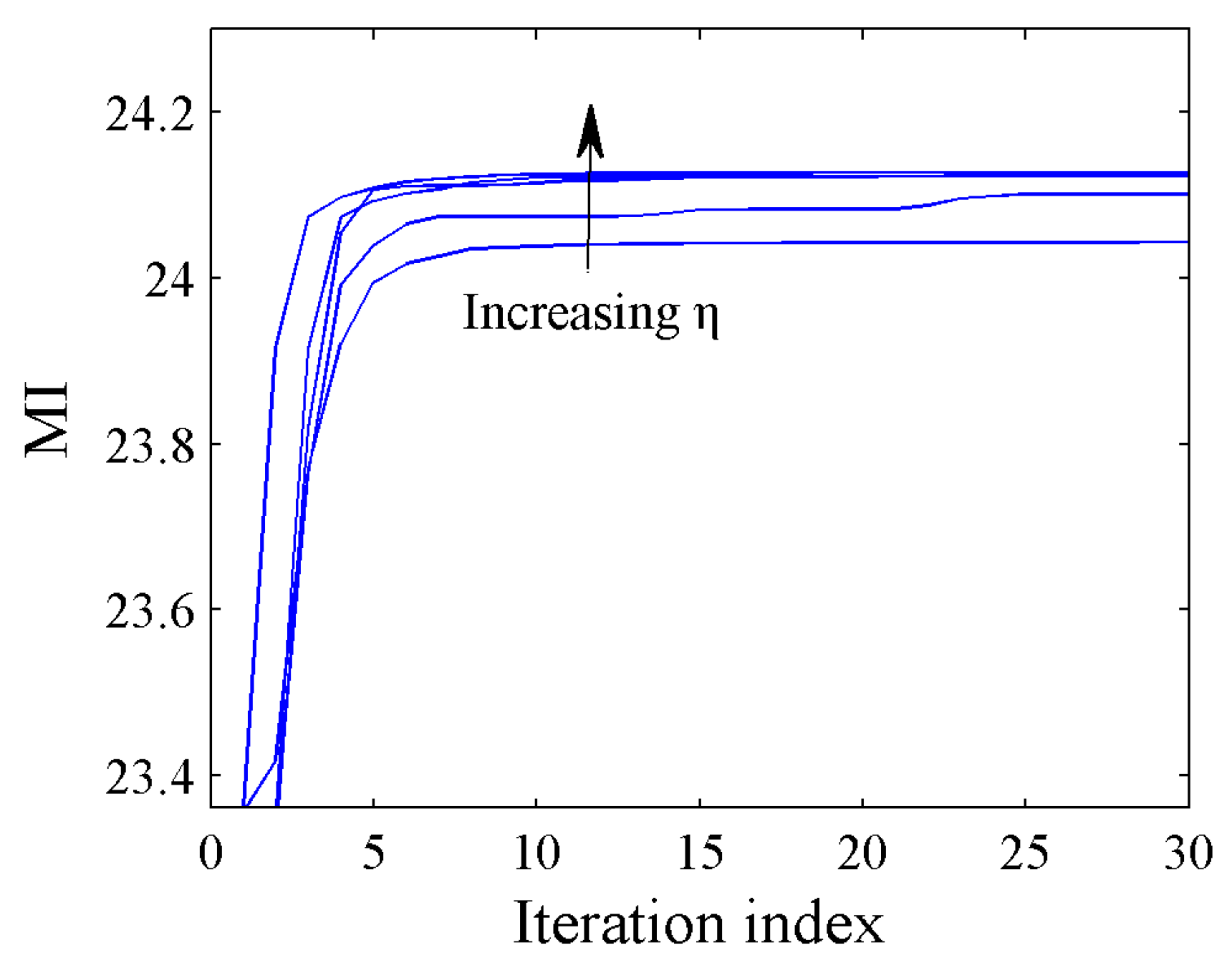
4.1. Convergence
4.2. Computational Complexity
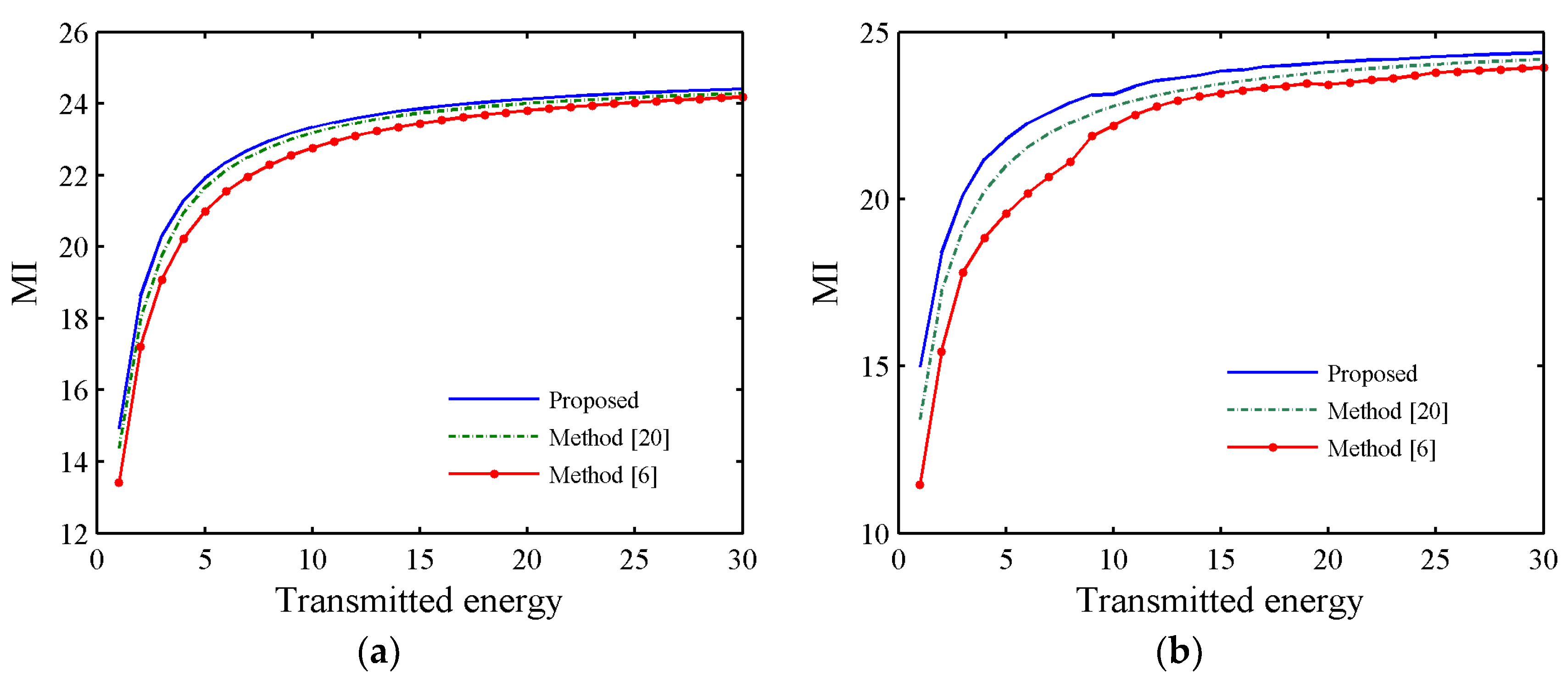
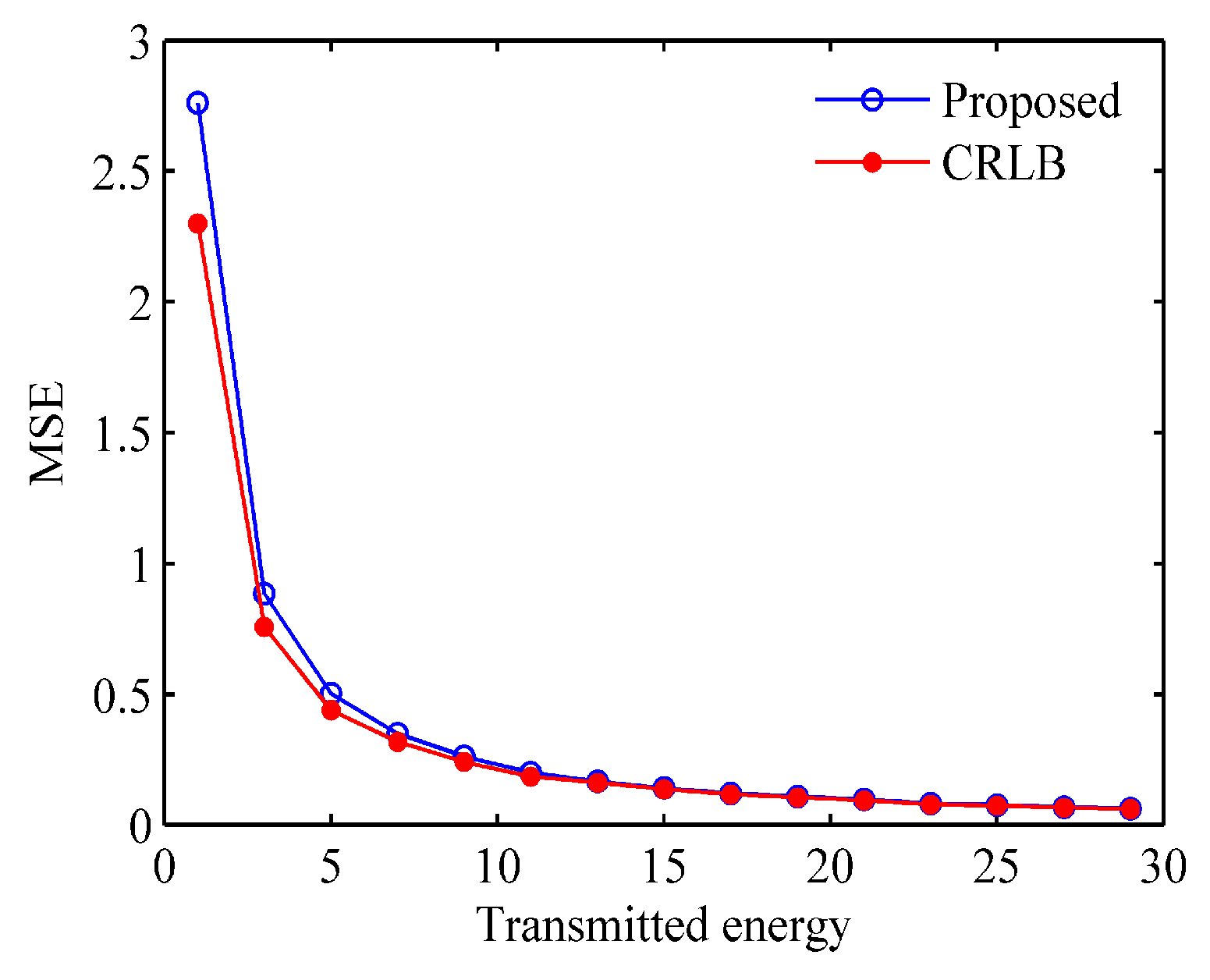
5. Simulation Results
5.1. Effectiveness Verification
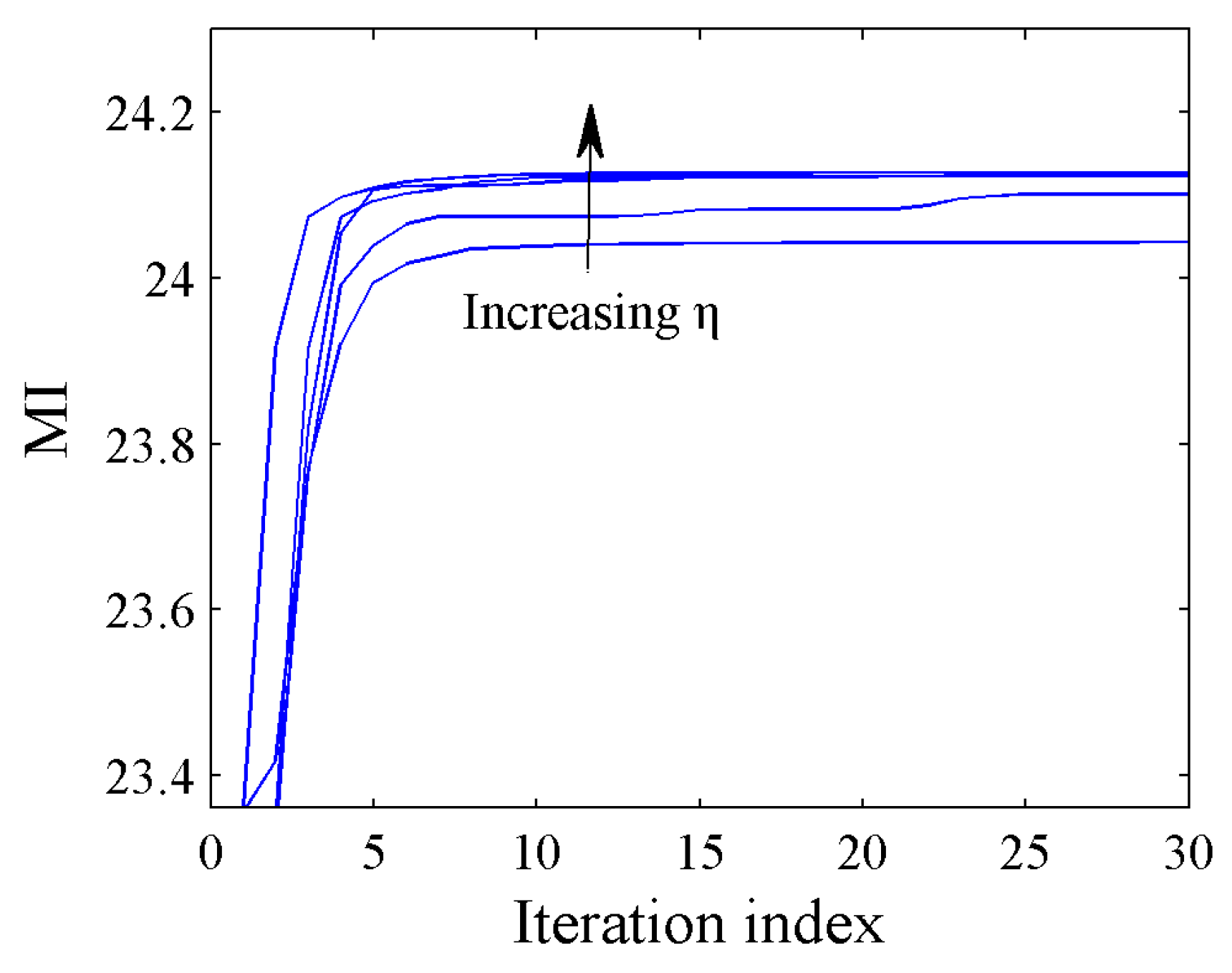
5.2. Influence of PAR
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
Appendix A
References
- Haykin, S. Cognitive radar: A way of the future. IEEE Trans. Signal Process. 2006, 23, 30–40. [Google Scholar] [CrossRef]
- Guerci, J.R. Cognitive radar: The knowledge-aided fully adaptive approach. In Proceedings of the 2010 IEEE Radar Conference, Norwood, MA, USA, 10–14 May 2010. [Google Scholar]
- Zhang, J.D.; Zhu, D.; Zhang, G. Adaptive compressed sensing radar oriented toward cognitive detection in dynamic sparse target scene. IEEE Trans. Signal Process. 2012, 60, 1718–1729. [Google Scholar] [CrossRef]
- Wang, L.L.; Wang, H.Q.; Wang, M.X.; Li, X. An overview of radar waveform optimization for target detection. J. Radars. 2016, 5, 487–498. [Google Scholar] [CrossRef]
- Yang, Y.; Blum, R.S. MIMO radar waveform design based on mutual information and minimum mean-square error estimation. IEEE Trans. Aerosp. Electron. Syst. 2007, 43, 330–343. [Google Scholar] [CrossRef]
- Petre, S.; He, H.; Li, J. Optimization of the receive filter and transmit sequence for active sensing. IEEE Trans. Signal Process. 2012, 60, 1730–1740. [Google Scholar] [CrossRef]
- Sen, S. PAPR-constrained pareto-optimal waveform design for OFDM-STAP radar. IEEE Trans. Geosci. Remote Sens. 2014, 52, 3658–3669. [Google Scholar] [CrossRef]
- Romero, R.A.; Bae, J.; Nathan, A.G. Theory and application of SNR and mutual information matched illumination waveforms. IEEE Trans. Aerosp. Electron. Syst. 2011, 47, 912–927. [Google Scholar] [CrossRef]
- Yao, Y.; Zhao, J.H.; Wu, L.N. Cognitive radar waveform optimization based on mutual information and Kalman filtering. Entropy 2018, 20, 653. [Google Scholar] [CrossRef]
- Xu, G. A method of waveform design for target detection and estimation. Princ. Mod. Radar. 2011, 33, 22–26. [Google Scholar] [CrossRef]
- Daniel, A.; Popescu, D.C. MIMO radar waveform design for multiple extended target estimation based on greedy SINR maximization. In Proceedings of the 2016 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), Shanghai, China, 20–25 March 2016; pp. 3006–3010. [Google Scholar] [CrossRef]
- Jiu, B.; Liu, H.W.; Zhang, L.; Wang, Y.H.; Luo, T. Wideband cognitive radar waveform optimization for joint target radar signature estimation and target detection. IEEE Trans. Aerosp. Electron. Syst. 2015, 51, 1530–1546. [Google Scholar] [CrossRef]
- Yue, W.Z.; Zhang, Y.; Liu, Y.M.; Xie, J.W. Radar constant-modulus waveform design with prior information of the extended target and clutter. Sensors 2016, 16, 889. [Google Scholar] [CrossRef] [PubMed]
- Cheng, Z.Y.; He, Z.S.; Liao, B.; Fang, M. MIMO radar waveform design with PAPR and similarity constraints. IEEE Trans. Signal Process. 2017, 66, 968–981. [Google Scholar] [CrossRef]
- Maio, A.D.; Huang, Y.W.; Piezzo, M.; Zhang, S.Z.; Farina, A. Design of optimized radar codes with a peak to average power ratio constraint. IEEE Trans. Signal Process. 2011, 59, 2683–2697. [Google Scholar] [CrossRef]
- Chen, P.; Wu, L.N.; Qi, C.H. Waveform optimization for target scattering coefficients estimation under detection and peak-to-average power ratio constraints in cognitive radar. Circuits Syst. Signal Process. 2015, 35, 163–184. [Google Scholar] [CrossRef]
- Tang, B. Efficient design algorithm of low PAR waveform wideband cognitive radar. Acta Aeronaut. Astronaut. Sin. 2016, 37, 688–694. [Google Scholar] [CrossRef]
- Tang, Y.H.; Zhang, Y.D.; Amin, M.G.; Sheng, W.X. Wideband multiple-input multiple-output radar waveform design with low peak-to-average ratio constraint. IET Radar Sonar Navig. 2016, 10, 325–332. [Google Scholar] [CrossRef]
- Zhang, X.W.; Wang, K.Z.; Liu, X.Z. Joint optimisation of transmit waveform and receive filter for cognitive radar. IET Radar Sonar Navig. 2018, 12, 11–20. [Google Scholar] [CrossRef]
- Hao, T.D.; Cui, C.; Gong, Y.; Sun, C.Y. Radar estimation waveform design under low-PAR constraints based on the sequence linear programming. J. Syst. Eng. Electron. 2017, 40, 2223–2229. [Google Scholar] [CrossRef]
- David, R.H.; Lange, K. A tutorial on MM algorithms. Am. Stat. 2004, 58, 30–37. [Google Scholar] [CrossRef]
- Razaviyayn, M.; Hong, M.Y.; Luo, Z.Q. A unified convergence analysis of block successive minimization methods for nonsmooth optimization. SIAM J. Optim. 2013, 23, 1126–1153. [Google Scholar] [CrossRef]
- Sun, Y.; Prabhu, B.; Palomar, D.P. Majorization-minimization algorithms in signal processing, communications, and machine learning. IEEE Trans. Signal Process. 2017, 65, 794–816. [Google Scholar] [CrossRef]
- Tang, B.; Tang, J.; Zhang, Y. Design of multiple-input-multiple-output radar waveforms for Rician target detection. IET Radar Sonar Navig. 2015, 10, 1583–1593. [Google Scholar] [CrossRef]
- Tang, B.; Naghsh, M.M.; Tang, J. Relative entropy-based waveform design for MIMO radar detection in the presence of clutter and interference. IEEE Trans. Signal Process. 2015, 63, 3783–3796. [Google Scholar] [CrossRef]
- Naghsh, M.M.; Modarres-Hashemi, M.M.; ShahbazPanahi, S.; Soltanalian, M.; Stoica, P. Unified optimization framework for multi-static radar code design using information-theoretic criteria. IEEE Trans. Signal Process. 2013, 61, 5401–5416. [Google Scholar] [CrossRef]
- Wu, L.L.; Prabhu, B.; Palomar, D.P. Cognitive radar-based sequence design via SINR maximization. IEEE Trans. Signal Process. 2017, 65, 779–793. [Google Scholar] [CrossRef]
- Harry, L.V.T. Detection, Estimation and Modulation Theory Radar Sonar Signal Processing and Gaussian Signals in Noise; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2001. [Google Scholar]
- Zhang, X.; Cui, C. Range-spread target detecting for cognitive radar based on track-before-detect. Int. J. Electron. 2013, 101, 74–87. [Google Scholar] [CrossRef]
- Aubry, A.; De Maio, A.; Jiang, B.; Zhang, S.Z. Ambiguity function shaping for cognitive radar via complex quartic optimization. IEEE Trans. Signal Process. 2013, 61, 5603–5619. [Google Scholar] [CrossRef]
- Tang, B.; Tang, J. Robust waveform design of wideband cognitive radar for extended target detection. In Proceedings of the 2016 IEEE International Conference on ICASSP, Shanghai, China, 20–25 March 2016; pp. 3096–3100. [Google Scholar]
- Cover, T.M.; Thomas, J.A. Elements of Information Theory, 2nd ed.; John Wiley and Sons Inc.: Hoboken, NJ, USA, 2016. [Google Scholar]
- Boyd, S.; Vandenberghe, V. Convex Sets Convex Optimization; Cambridge University Press: Cambridge, UK, 2004. [Google Scholar]
- Zhang, X.D. Matrix Analysis and Applications, 2nd ed.; Tsinghua University Press: Beijing, China, 2004. [Google Scholar]
- Naghsh, M.M.; Modarres-Hashemi, M.; Alaee, M.; Alian, E.H.M. An information theoretic approach to robust constrained code design for MIMO radars. IEEE Trans. Signal Process. 2017, 65, 3647–3661. [Google Scholar] [CrossRef]
- Horn, R.A.; Johnson, C.R. Matrix Analysis; Cambridge University Press: Cambridge, UK, 2012. [Google Scholar]
- Grant, M. CVX Matlab Software for Disciplined Convex Programming. Version 2.1. Available online: http://cvxr.com/cvx (accessed on 31 December 2018).
- Luo, Z.Q.; Ma, W.K.; So, A.M.C.; Ye, Y.Y.; Zhang, S.Z. Semidefinite relaxation of quadratic optimization problems. IEEE Signal Process. Mag. 2010, 27, 20–34. [Google Scholar] [CrossRef]
- Lutkepohl, H. Handbook of Matrices; John Wiley and Sons Inc.: New York, NY, USA, 1997. [Google Scholar]
- Tropp, J.A.; Dhillon, I.S.; Robert, W.H.; Thomas, S. Designing structured tight frames via an alternating projection method. IEEE Trans. Inform. Theory 2005, 51, 188–209. [Google Scholar] [CrossRef]
- Varadhan, R.; Roland, C. Simple and globally convergent methods for accelerating the convergence of any EM algorithm. Scand. J. Stat. 2008, 35, 335–353. [Google Scholar] [CrossRef]
- Soltanalian, M.; Tang, B.; Li, J.; Stoica, P. Joint design of the receive filter and transmit sequence for active sensing. IEEE Trans. Process. Lett. 2013, 20, 423–426. [Google Scholar] [CrossRef]
- Han, C.Z.; Zhu, Y.H.; Duan, Z.S.; Han, D.Q.; Liu, W.F. Milti-Source Information Fusion, 2nd ed.; Tsinghua University Press: Beijing, China, 2006. [Google Scholar]





© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hao, T.; Cui, C.; Gong, Y. Efficient Low-PAR Waveform Design Method for Extended Target Estimation Based on Information Theory in Cognitive Radar. Entropy 2019, 21, 261. https://doi.org/10.3390/e21030261
Hao T, Cui C, Gong Y. Efficient Low-PAR Waveform Design Method for Extended Target Estimation Based on Information Theory in Cognitive Radar. Entropy. 2019; 21(3):261. https://doi.org/10.3390/e21030261
Chicago/Turabian StyleHao, Tianduo, Chen Cui, and Yang Gong. 2019. "Efficient Low-PAR Waveform Design Method for Extended Target Estimation Based on Information Theory in Cognitive Radar" Entropy 21, no. 3: 261. https://doi.org/10.3390/e21030261
APA StyleHao, T., Cui, C., & Gong, Y. (2019). Efficient Low-PAR Waveform Design Method for Extended Target Estimation Based on Information Theory in Cognitive Radar. Entropy, 21(3), 261. https://doi.org/10.3390/e21030261