Generalized Chirp Scaling Combined with Baseband Azimuth Scaling Algorithm for Large Bandwidth Sliding Spotlight SAR Imaging


Abstract
:1. Introduction
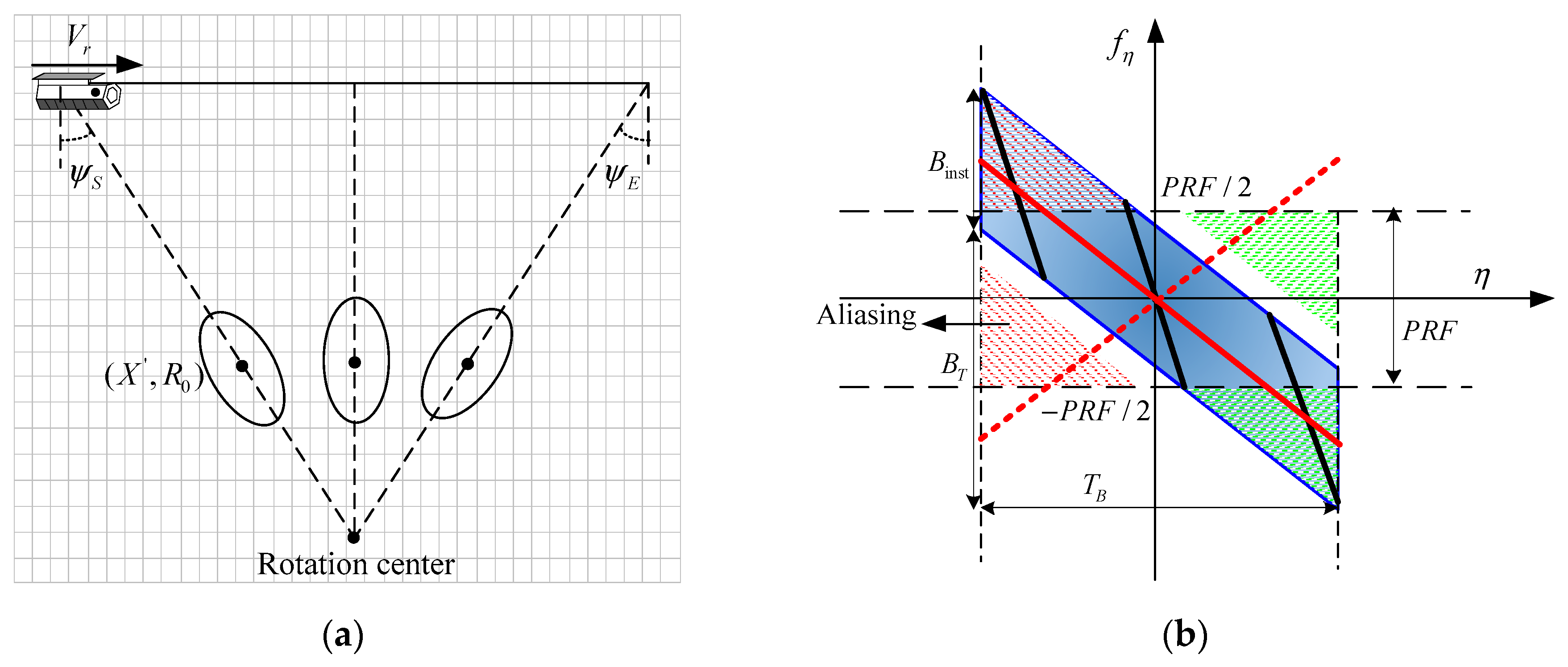
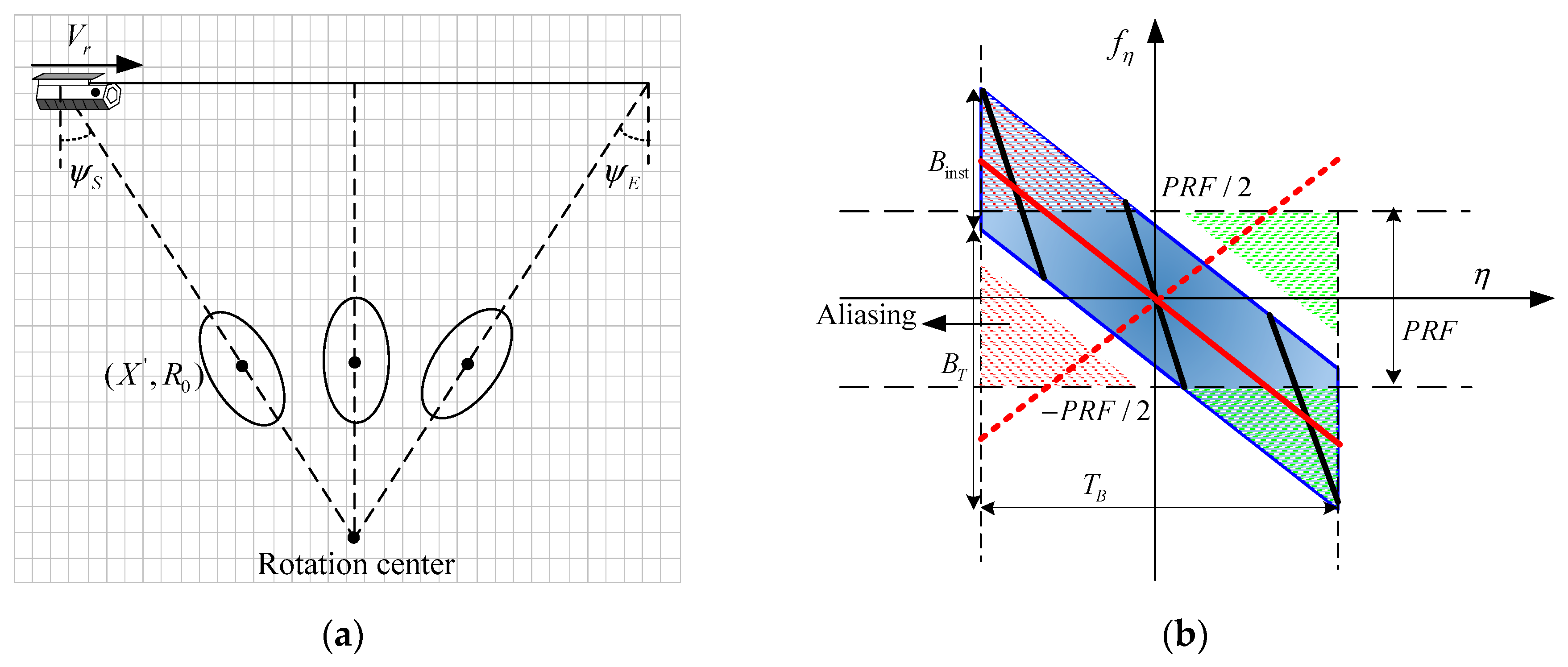
2. Analysis of Model Error
3. GCS-BAS
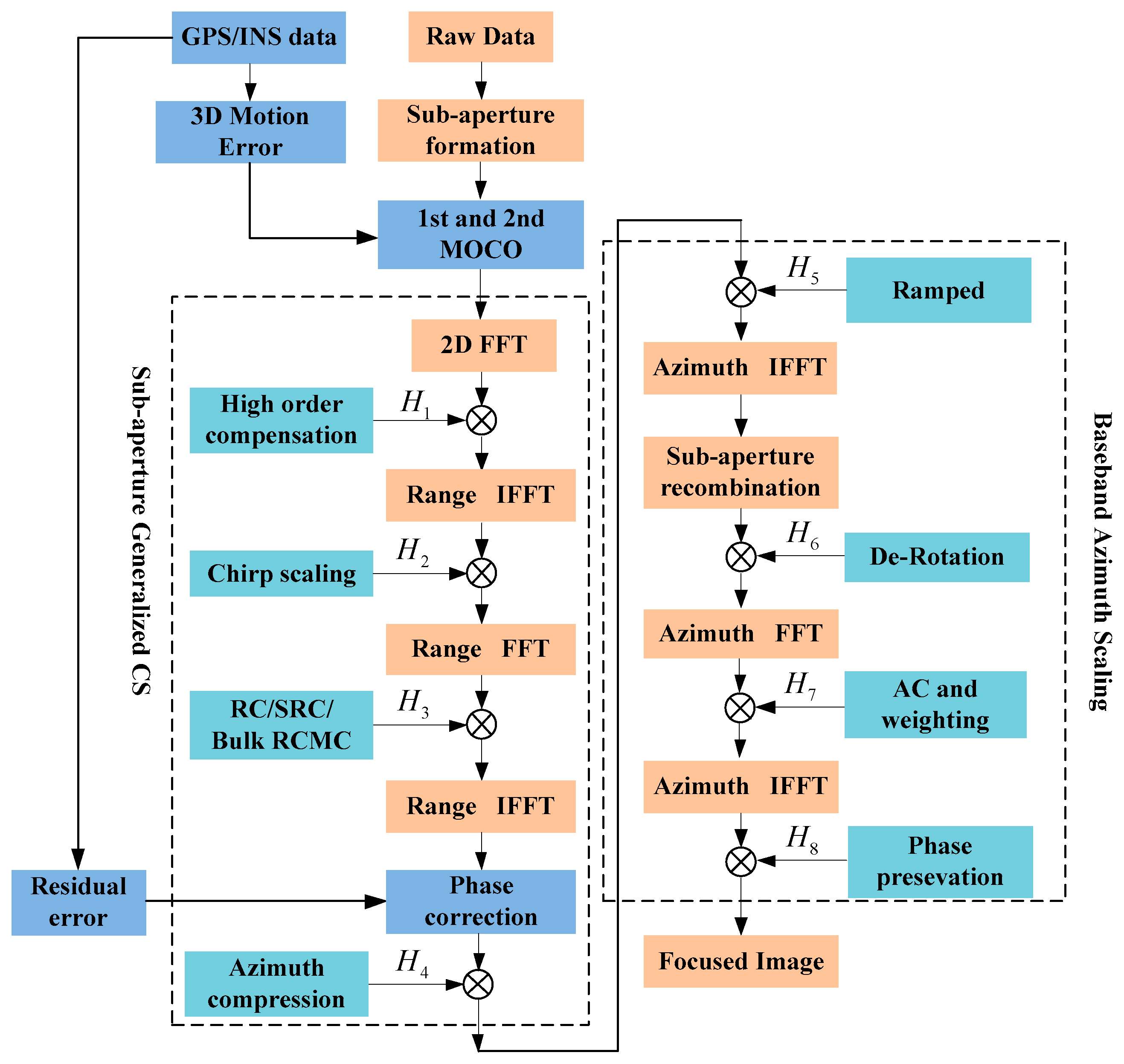
3.1. Procedures of GCS-BAS
3.2. Theoretical Formulation
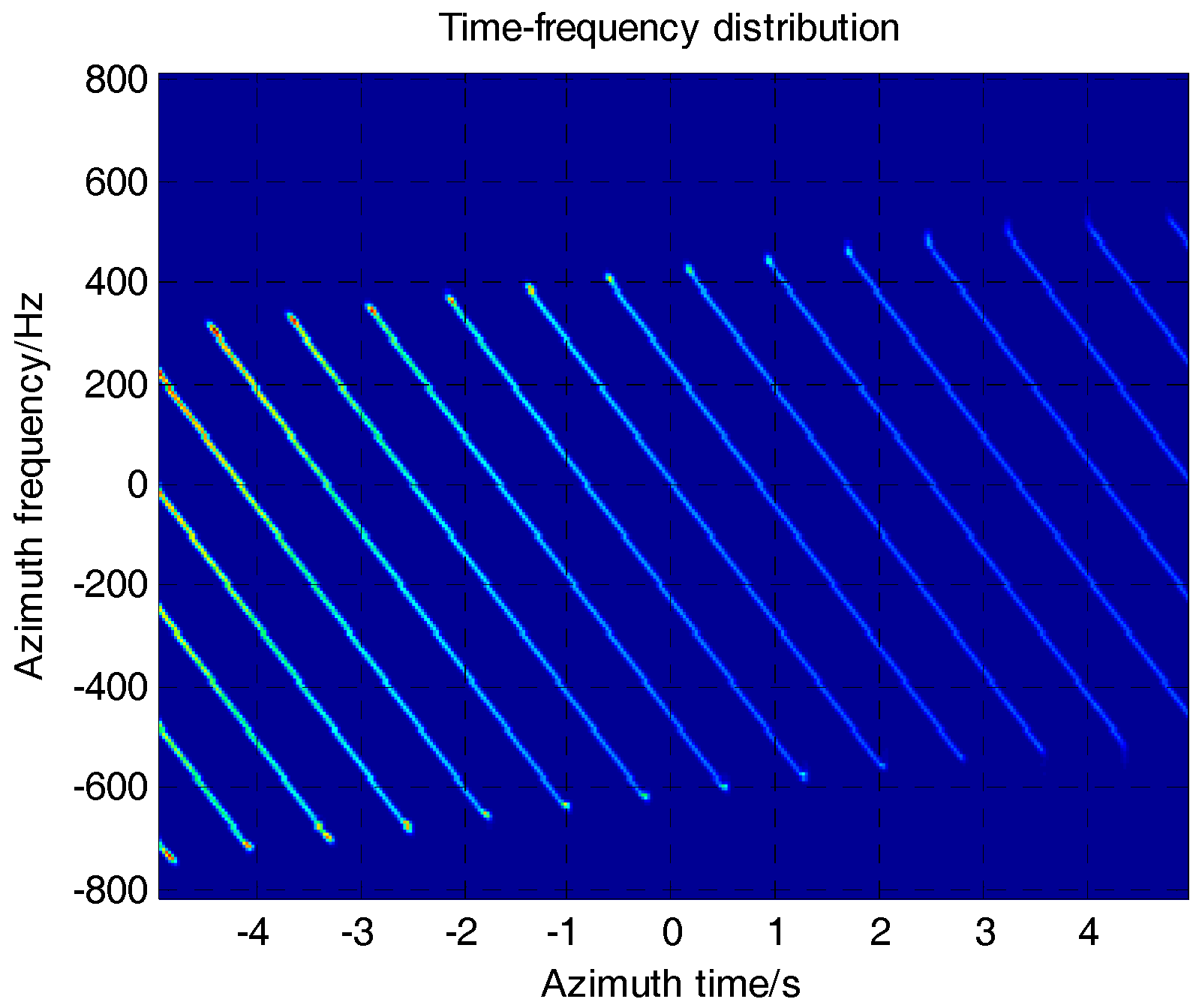
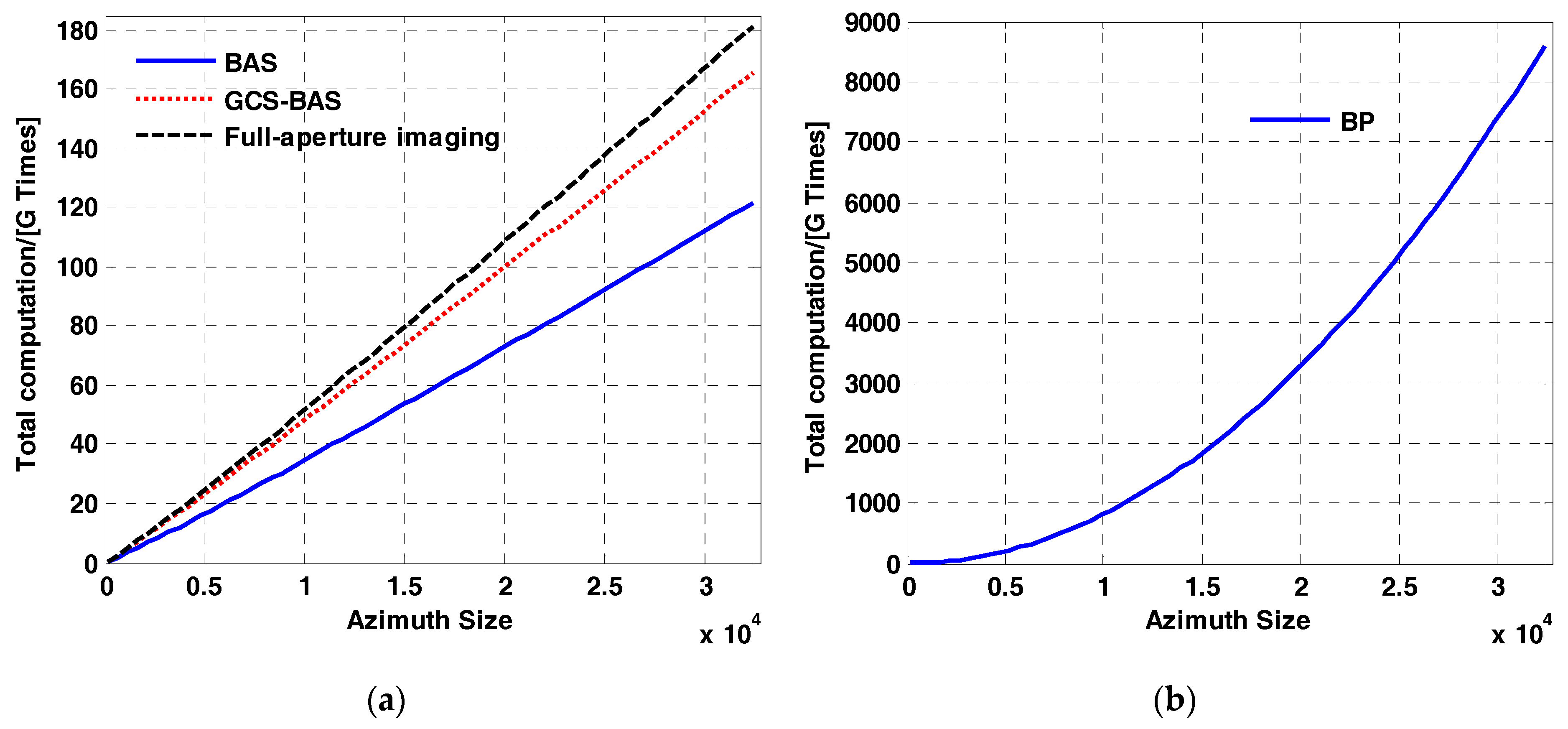
4. Experimental Results and Discussion
5. Conclusions
Acknowledgments
Author Contributions
Conflicts of Interest
Appendix A
References
- Balz, T.; Caspari, G.; Fu, B.; Liao, M. Discernibility of Burial Mounds in High-Resolution X-Band SAR Images for Archaeological Prospections in the Altai Mountains. Remote Sens. 2016, 8, 817. [Google Scholar] [CrossRef]
- Redadaa, S.; Le Caillec, J.M.; Solaiman, B.; Benslama, M. Focusing problems of subsurface imaging by a low-frequency SAR. In Proceedings of the International Geoscience and Remote Sensing Symposium, Barcelona, Spain, 23–27 July 2007; pp. 4101–4104. [Google Scholar]
- Ulander, L.M.H.; Blom, M.; Flood, B.; Follo, P.; Frolind, P.O.; Gustavsson, A.; Jonsson, T.; Larsson, B.; Murdin, D.; Pettersson, M.; et al. Development of the largeband LORA SAR operating in the VHF/UHF-band. In Proceedings of the International Geoscience Remote Sensing Symposium, Toulouse, France, 21–25 July 2003; pp. 4268–4270. [Google Scholar]
- Ressler, M.A. The Army Research Laboratory ultra wideband Boom-SAR. In Proceedings of the International Geoscience Remote Sensing Symposium, Lincoln, NE, USA, 27–31 May 1996; pp. 1886–1888. [Google Scholar]
- Hellsten, H. CARABAS—An UWB low frequency SAR. In Proceedings of the IEEE MTT-S International Microwave Symposium Digest, Albuquerque, NM, USA, 1–5 June 1992; pp. 1495–1498. [Google Scholar]
- Rau, R.; McClellan, J.H. Analytic Models and Postprocessing Techniques for UWB SAR. IEEE Trans. Aerosp. Electron. Syst. 2000, 36, 1058–1074. [Google Scholar]
- Prats, P.; Scheiber, R.; Mittermayer, J.; Meta, A.; Moreria, A. Processing of Sliding Spotlight and TOPS SAR Data Using Baseband Azimuth Scaling. IEEE Trans. Geosci. Remote Sens. 2010, 48, 770–780. [Google Scholar] [CrossRef]
- Davidson, G.W.; Cumming, I.G. A Chirp Scaling Approach for Processing Squint Mode SAR Data. IEEE Trans. Aerosp. Electron. Syst. 1996, 32, 121–133. [Google Scholar] [CrossRef]
- Zaugg, E.C.; Long, D.G. Generalized Frequency-Domain SAR Processing. IEEE Trans. Geosci. Remote Sens. 2009, 47, 3761–3773. [Google Scholar] [CrossRef]
- Lanari, R.; Tesauro, M.; Sansosti, E.; Fornaro, G. Spotlight SAR data focusing based on a two-step processing approach. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1993–2004. [Google Scholar] [CrossRef]
- Tang, Y.; Wang, Y.F.; Zhang, B.C. A Study of Sling Spotlight SAR Imaging Mode. J. Electron. Inf. Technol. 2007, 29, 26–29. [Google Scholar]
- Wei, X.; Deng, Y.K. Full-Aperture SAR Data Focusing in the Spaceborne Squinted Sliding spotlight Mode. IEEE Trans. Geosci. Remote Sens. 2014, 52, 4596–4607. [Google Scholar] [CrossRef]
- Mittermayer, J.; Moreira, A.; Loffeld, O. Spotlight SAR Data Processing Using the Frequency Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 1999, 37, 2198–2214. [Google Scholar] [CrossRef]
- Sun, G.C.; Xing, M.D.; Liu, Y.; Sun, L.; Bao, Z.; Wu, Y. Extended NCS Based on Method of Series Reversion for Imaging of Highly Squinted SAR. IEEE Geosci. Remote Sens. Lett. 2011, 8, 446–450. [Google Scholar] [CrossRef]
- Neo, Y.L.; Wong, F.; Cumming, I.G. A Two-Dimensional Spectrum for Bistatic SAR Processing Using Series Reversion. IEEE Geosci. Remote Sens. Lett. 2007, 4, 93–96. [Google Scholar] [CrossRef]
- Luo, X.L.; Deng, Y.K.; Wang, R.; Xu, W.; Luo, Y.H.; Guo, L. Image Formation Processing for Sliding Spotlight SAR With Stepped Frequency Chirps. IEEE Geosci. Remote Sens. Lett. 2014, 11, 1692–1696. [Google Scholar]
- Zheng, X.; Yu, W.; Li, Z. A Novel Algorithm for Wide Beam SAR Motion Compensation Based on Frequency Division. In Proceedings of the IEEE International Symposium on Geoscience and Remote Sensing, Beijing, China, 10–15 July 2016; pp. 3160–3163. [Google Scholar]
- Wang, K.; Liu, X. Quartic-phase algorithm for highly squinted SAR data processing. IEEE Geosci. Remote Sens. Lett. 2007, 4, 246–250. [Google Scholar] [CrossRef]
- Wong, F.H.; Cumming, I.G.; Neo, Y.L. Focusing Bistatic SAR Data Using the Nonlinear Chirp Scaling Algorithm. IEEE Trans. Geosci. Remote Sens. 2008, 46, 2493–2505. [Google Scholar] [CrossRef]
- Zaugg, E.C.; Long, D.G. Generalized Frequency Scaling and Backprojection for LFM-CW SAR Processing. IEEE Trans. Geosci. Remote Sens. 2015, 53, 3600–3614. [Google Scholar] [CrossRef]
- Raney, R.K.; Runge, H.; Bamler, R.; Cumming, I.G.; Wong, F.H. Precision SAR Processing Using Chirp Scaling. IEEE Trans. Geosci. Remote Sens. 1994, 32, 786–799. [Google Scholar] [CrossRef]
- He, F.; Chen, Q.; Dong, Z.; Sun, Z. Processing of Ultrahigh-Resolution Spaceborne Sliding Spotlight SAR Data. IEEE Trans. Aerosp. Electron. Syst. 2013, 49, 1–21. [Google Scholar] [CrossRef]
- Lanari, R.; Tesauro, M.; Sansosti, E.; Fornaro, G. Spotlight SAR Data Focusing Based on a Two-Step Processing Approach. IEEE Trans. Geosci. Remote Sens. 2001, 39, 1993–2004. [Google Scholar] [CrossRef]
- Cumming, I.G.; Wong, F.H. Digital Processing of Synthetic Aperture Radar Data Algorithms and Implementation; ARTECH HOUSE, Inc.: Norwood, MA, USA, 2005. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameter | Value |
|---|---|
| Carrier frequency/ | 8 GHz |
| Bandwidth/ | 1 GHz |
| Reference range/ | 30 km |
| Pulse repetition frequency/ | 600 Hz |
| Velocity of radar/ | 240 m/s |
| Pulse width/ | 40 μs |
| Parameter | Value |
|---|---|
| Carrier frequency/ | 8 GHz |
| Bandwidth/ | 1 GHz |
| Scaling range/ | 30 km |
| Pulse repetition frequency/ | 600 Hz |
| Velocity of platform/ | 240 m/s |
| Pulse width/ | 40 μs |
| Image swath | 5 km × 5 km |
| Factor of sliding spotlight/ | 0.4 |
| Target Position | Dimension | Index | BAS | GCS-BAS | Full-Aperture Imaging | BP |
|---|---|---|---|---|---|---|
| Far range | Azimuth | PSLR/dB | −13.6593 | −13.3273 | −13.3364 | −13.4676 |
| ISLR/dB | −12.4162 | −10.7198 | −10.6901 | −10.6779 | ||
| Res/m | 0.2490 | 0.2371 | 0.2365 | 0.2359 | ||
| Range | PSLR/dB | −9.7625 | −12.8918 | −13.0021 | −13.2873 | |
| ISLR/dB | −6.2740 | −10.1871 | −10.0817 | −9.9379 | ||
| Res/m | 0.1379 | 0.1328 | 0.1328 | 0.1328 | ||
| Mid-range | Azimuth | PSLR/dB | −14.0884 | −13.4163 | −13.3701 | −13.6043 |
| ISLR/dB | −11.7920 | −10.5783 | −10.5001 | −10.1517 | ||
| Res/m | 0.2321 | 0.2229 | 0.2203 | 0.2191 | ||
| Range | PSLR/dB | −9.5632 | −13.2104 | −13.2498 | −13.2759 | |
| ISLR/dB | −5.6929 | −9.9811 | −9.98758 | −9.9629 | ||
| Res/m | 0.1359 | 0.1328 | 0.1328 | 0.1328 | ||
| Near range | Azimuth | PSLR/dB | −14.8360 | −13.2982 | −13.3125 | −13.6205 |
| ISLR/dB | −10.9848 | −10.3992 | −10.0126 | −9.9223 | ||
| Res/m | 0.2371 | 0.2234 | 0.2190 | 0.2148 | ||
| Range | PSLR/dB | −9.4085 | −12.9537 | −13.0529 | −13.2856 | |
| ISLR/dB | −5.6916 | −9.6545 | −9.6581 | −9.9877 | ||
| Res/m | 0.1395 | 0.1328 | 0.1328 | 0.1328 |
| Dimension | Index | BAS | GCS-BAS | Full-Aperture Imaging | BP | |
|---|---|---|---|---|---|---|
| Range | Res | Mean/m | 0.1351 | 0.1327 | 0.1328 | 0.1324 |
| Standard deviation | 0.0090 | 0.0010 | 0.0012 | 0.0002 | ||
| PSLR | Mean/dB | −10.8216 | −13.0939 | −13.2842 | −13.2889 | |
| Standard deviation | 7.4778 | 0.5546 | 0.1766 | 0.0558 | ||
| ISLR | Mean/dB | −7.4356 | −10.0103 | −9.9508 | −9.8435 | |
| Standard deviation | 6.6592 | 1.2482 | 1.2809 | 0.7351 | ||
| Azimuth | Res | Mean/m | 0.2423 | 0.2348 | 0.2354 | 0.2348 |
| Standard deviation | 0.0238 | 0.0004 | 0.0018 | 0.0004 | ||
| PSLR | Mean/dB | −13.4884 | −13.3351 | −13.3710 | −13.3012 | |
| Standard deviation | 0.7070 | 0.1968 | 0.3371 | 0.0948 | ||
| ISLR | Mean/dB | −11.1393 | −10.6051 | −10.9491 | −10.5896 | |
| Standard deviation | 5.0295 | 3.0250 | 2.7883 | 2.6693 | ||
| Algorithms | Computational Burden |
|---|---|
| BAS | |
| GCS-BAS | |
| Full-aperture imaging | |
| BP |
| Algorithms | BAS | GCS-BAS | Full-Aperture Imaging | BP |
|---|---|---|---|---|
| Time consumption | 1153.1293 s | 1405.0256 s | 3685.2732 s | 160,484.2220 s |
© 2017 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yi, T.; He, Z.; He, F.; Dong, Z.; Wu, M. Generalized Chirp Scaling Combined with Baseband Azimuth Scaling Algorithm for Large Bandwidth Sliding Spotlight SAR Imaging. Sensors 2017, 17, 1237. https://doi.org/10.3390/s17061237
Yi T, He Z, He F, Dong Z, Wu M. Generalized Chirp Scaling Combined with Baseband Azimuth Scaling Algorithm for Large Bandwidth Sliding Spotlight SAR Imaging. Sensors. 2017; 17(6):1237. https://doi.org/10.3390/s17061237
Chicago/Turabian StyleYi, Tianzhu, Zhihua He, Feng He, Zhen Dong, and Manqing Wu. 2017. "Generalized Chirp Scaling Combined with Baseband Azimuth Scaling Algorithm for Large Bandwidth Sliding Spotlight SAR Imaging" Sensors 17, no. 6: 1237. https://doi.org/10.3390/s17061237