1. Introduction
Noncircular (NC) signals, such as amplitude-modulated (AM) signals and binary phase-shift keying (BPSK)-modulated signals, have been widely applied in various communication systems [
1,
2,
3,
4,
5,
6,
7,
8]. Different from circular signals, which can only use the information in the covariance matrix for direction finding, NC signals can use the information in both the covariance matrix and the elliptic covariance matrix for direction finding. This NC property can be utilized to increase the degrees of freedom (DOFs) and improve the estimation performance. A lot of DOA estimation algorithms for NC sources have been developed, such as the NC MUSIC method [
9], NC Root-MUSIC method [
1], NC ESPRIT method [
10] and NC Unitary ESPRIT method [
11]. These traditional NC DOA estimation algorithms utilize the complex conjugate counterpart of the received signals to obtain the NC covariance matrix, which corresponds to a virtual array consisting of the physical array and its flipped array [
12]. These algorithms mostly utilize the uniform linear array (ULA) as the array model and can detect at most
sources with
N physical sensors. In order to detect more sources, some NC high-order cumulant MUSIC methods based on the non-Gaussian characteristic of many NC sources, such as the NC 2q-MUSIC method [
13] and ROOT NC 4-MUSIC method [
2], have been proposed. However, the array model in these methods is still the ULA, and the computation complexity of the cumulant-based methods are large. As we know, the array aperture is a fundamental parameter that affects the performance of the DOA estimation. For the ULA, its aperture is usually less than that of the sparse array constructed based on the concept of the coarray [
14,
15,
16,
17,
18,
19]. Thus, an estimator, which jointly utilizes the NC property, the sparse array and the concept of the coarray, is likely to detect more sources than the traditional NC DOA estimators.
In recent years, sparse arrays have been attracting more and more attention due to the high number of DOFs [
20,
21,
22,
23]. The concept of the coarray based on the Khatri–Rao (KR) product [
21,
24] is applied to design various of sparse arrays, such as the coprime array [
22]. The coprime array consists of two uniform linear subarrays with
M and
N sensors, respectively, where
M and
N are a coprime pair of positive integers. The
M element subarray with spacing
N units and the
N element subarray with spacing
M units share the first sensor. By applying the KR product to the covariance matrix of the received signals, the difference coarray [
21,
22,
23,
24,
25,
26,
27] of the coprime array is constructed. With only
physical sensors, the virtual array can detect
sources. In order to achieve a higher number of DOFs, many novel methods and optimized configurations based on the difference coarray for the coprime array have been proposed, such as the sparsity enforced recovery technique for the coprime array [
18], the coarray interpolation method for the coprime array [
28], the extended coprime array [
29], the generalized coprime arrays [
24] and the coprime array with multiperiod subarrays (CAMpS) [
30,
31]. Since these methods and improved configurations are developed based on the properties of the difference coarray for the coprime array, their DOFs cannot be more than twice the physical aperture. Constructing a novel virtual array with larger array aperture than the difference coarray is another useful way to increase the DOFs. In [
16], we utilized both the temporal information and the spatial information of the received signals to propose the vectorized conjugate augmented MUSIC (VCAM) algorithm, which can construct the difference and sum (diff–sum) coarray. The diff–sum coarray comprises both the difference set and the sum set so that it can achieve a higher number of DOFs than the above difference coarrays. In addition, the aperture of the diff–sum coarray can be more than twice the physical aperture, which could help to decrease the array size. However, the source signals applied in both the VCAM algorithm and the methods constructing the difference coarray are circular signals.
In this paper, we propose an improved NC MUSIC algorithm based on the concept of the coarray to perform the DOA estimation of NC quasi-stationary sources. We name the novel method as the vectorized NC MUSIC (VNCM) method. By applying the KR product operation to the NC covariance matrix, we can obtain an equivalent received signal, which seems to be received from a diff–sum coarray. The diff–sum coarray, which is symmetrical with the zero point as the center, can be divided into three parts: the difference coarray, the nonpositive sum coarray and the non-negative sum coarray. Thus, the diff–sum coarray is likely to achieve a higher number of DOFs than the traditional NC virtual array consisting of the physical array and its flipped array. Also, we utilize the characteristic of the quasi-stationary sources instead of the spatial smoothing method to solve the single snapshot issue (the coherent issue) of the equivalent received signal so that the available DOFs will not be reduced by half. Due to the complementarity between the difference set and the sum set for the coprime array [
16], we utilize the CAMpS, which contains the prototype coprime array as a special case, as the basic array model in this paper. In particular, we summarize and prove the properties and DOFs of the diff–sum coarray for the CAMpS. Furthermore, we improve the CAMpS to propose a diff–sum coprime array with multiperiod subarrays (DsCAMpS) which can achieve a higher number of DOFs than the CAMpS. Extensive simulations are provided to verify the performance of the diff–sum coarray and the effectiveness of the VNCM method.
Notations: Throughout the paper, we utilize lowercase bold italic letters to denote vectors, for example, . We utilize capital bold italic letters to denote matrices, for example, . , and respectively represent transpose, conjugation and conjugate transpose. is used to denote the expectation operation and represents the vectorizing operation. ⊗ and ⊙ respectively denote the left Kronecker product and the Khatri–Rao product.
2. Data Model
Consider a linear antenna array consisting of
R elements. The set of the sensor locations is denoted as
. The first sensor is selected as the reference, that is,
.
Q far-field, narrowband, uncorrelated and NC sources impinge on this array from directions
. The NC sources in the paper are assumed as wide-sense quasi-stationary [
32,
33] with the NC rate as
[
13,
34]. Then, the received signal can be modeled as
where
is the observed signal vector,
represents the white circular complex Gaussian noise vector with zero mean and variance
, and
is the steering matrix. The
qth
column vector of
is
with
being the signal wavelength.
According to the noncircularity of the signals, the following relationships exist:
and
where
is the NC phase of
,
is real-valued with zero-phase,
is the covariance and
is the eliptic covariance. As the signals are quasi-stationary, the following assumptions [
33] hold as well.
(A1) Each signal
is wide-sense quasi-stationary with the frame length being
L and the total number of frames being
, that is,
where
represents the snapshots of the
qth signal in the
ith frame.
(A2) The variance sequence is wide-sense stationary and uncorrelated with each other. That is to say, , and , .
For the
ith
frame, combining the received signal and its conjugate version together results in the following NC observation vector,
where
,
,
and
. The
qth column vector of
is
, which can be considered to correspond to a traditional NC virtual array consisting of
different virtual sensors with the zero point as the center. From (
5), the covariance matrix of
can be obtained as
where
and
with
and
. The traditional NC DOA estimators, of which the array model is the ULA, directly perform eigenvalue decomposition on
to obtain the noise subspace
. According to [
1,
9], the maximum number of detectable signals (MNDS) is determined by the degree of
with
. Therefore, at most
sources can be detected. Since the DOF of the traditional NC virtual array with
R sensors is
, we have MNDS = DOF−1.
3. Vectorized NC MUSIC Algorithm
In this paper, we focus on combining the NC property and the concept of the coarray. NC DOA estimators based on the concept of the coarray have two problems to be resolved: (1) how to solve the single snapshot issue (the coherent issue) of the equivalent received signal obtained by the KR product operation; and (2) how to generate a coarray with a large array aperture. In order to resolve the two problems, we propose a vectorized NC MUSIC (VNCM) algorithm.
Within the
ith
frame, vectorizing
where
,
and the
qth
column vector of
has the form
Having the similar form as the received signal
in (
1),
in (
7) can be seen as the equivalent received signal at a virtual array whose steering matrix is given by
. According to (
8), we can find that the virtual sensor locations can be represented as
. Thus, the novel NC virtual array is a diff–sum coarray consisting of both the difference and sum results. Specially, in (
8),
and
correspond to the difference coarray,
corresponds to the nonpositive sum coarray and
corresponds to the non-negative sum coarray. In the following, we would show that the MNDS of the VNCM method is determined by the DOFs of the diff–sum coarray, regardless of the NC phase
. Assume that the consecutive range of the diff–sum coarray is
. As the performance of the MUSIC-class methods are mainly determined by the ULA part of the virtual array, we remove the repeated and discrete lags in (
7) to obtain
where
is a
vector extracted from
and
is a
matrix with the
qth column being
where
,
and
are respectively extracted from
,
and
,
is a block diagonal matrix and
.
Combining all the NC virtual received signals
, we can obtain the NC virtual frame-data matrix over all the
frames as
where
and
. According to A2) in
Section 2, it is obvious that each row in
is a wide-sense stationary process with the expectation being
. Thus, the expectation vector of
can be expressed as
where
. Subtracting
from each column vector of the NC virtual frame-data matrix
, we have
where
with
, and
with
. It is obvious that each row in
is a zero-mean wide-sense stationary process. Besides, according to (A2) in
Section 2, each row sequence in
is uncorrelated with the other row sequences. Thus, similar to (
6), we can obtain the correlation matrix of
as
where
. As
is a full-rank matrix, the eigenvalue decomposition of
can be obtained as
where
is the signal subspace whose columns represent the signal subspace eigenvectors of
,
is the noise subspace whose columns represent the noise subspace eigenvectors of
,
with
representing the
Q largest eigenvalues of
, and
. Due to the orthogonality between the signal subspace and the noise subspace, any direction
from
satisfies the following equation
Associated with (
10), (
16) can be rewritten as
According to [
1,
35,
36],
is rank deficient at
. Thus, the DOAs can be estimated by the following estimator,
Searching the direction over the range , the DOAs can be obtained from the peaks in .
Remarks. When any element in is replaced by (), can be seen as a polynomial of degree , whose roots appear in reciprocal conjugate pairs. Thus, the VNCM algorithm can detect up to signals. Since the DOF of the diff–sum coarray is , it can be concluded that for the VNCM method. From the discussions above, it is obvious that the MNDS of the VNCM method is determined by the DOF of the diff–sum coarray, regardless of the NC phase. With R physical sensors, the MNDS of the traditional NC DOA estimators is . As is obtained by combining the difference and sum results of the physical sensor locations, we can conclude . Therefore, the VNCM algorithm can detect more signals than the traditional NC DOA estimators. Furthermore, designing a sparse array, of which the diff–sum coarray achieves a high number of DOFs, can help further improve the performance of the proposed method. It is noted that in theory, the high-order cumulant-based MUSIC method can also be applied to the sparse array to detect NC sources. The virtual array generated in this kind of method should be able to achieve the same number of DOFs as that generated in the VNCM method. However, this kind of method should first solve one issue, which is how to separate the NC phases from the cumulant matrix to perform the eigenvalue decomposition. The method proposed in this paper can help to solve this issue, which would be a future work for us to do. The difference between the NC high-order cumulant-based method and the VNCM method is that the NC high-order cumulant-based method is restricted to non-Gaussian signal sources, but the signal model in the VNCM method is not necessarily non-Gaussian.
4. The Diff–Sum Coprime Array with Multiperiod Subarrays Based on the Concept of the Diff–Sum Coarray
Now, since the difference set and the sum set for the coprime array are complementary [
16,
37], we choose the CAMpS [
30,
31] as the basic array model. In this section, we would summarize and prove the properties and the DOF of the diff–sum coarray for the CAMpS. Then, based on these properties, we improve the CAMpS to propose a diff–sum coprime array with multiperiod subarrays (DsCAMpS) of which the diff–sum coarray achieves a higher number of DOFs.
4.1. The CAMpS and the Concept of the Diff–Sum Coarray
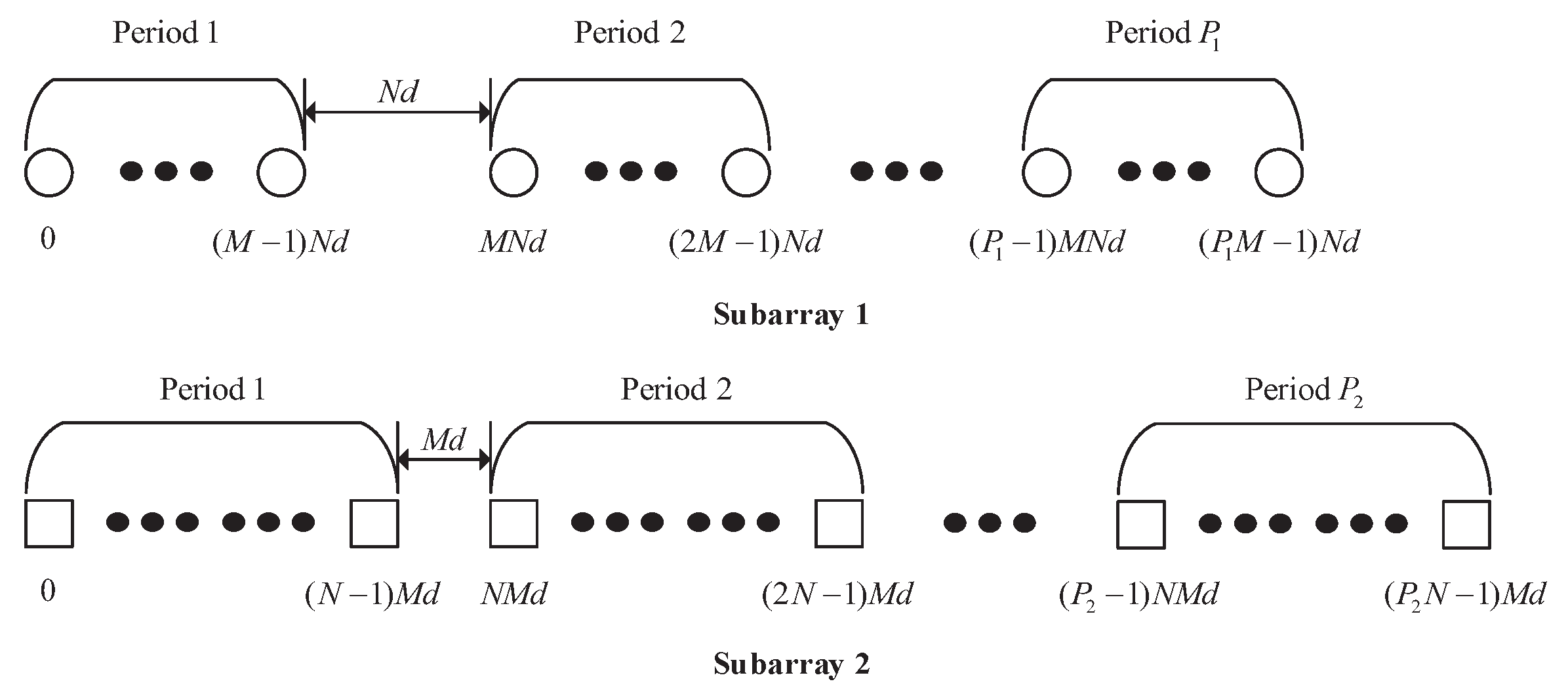
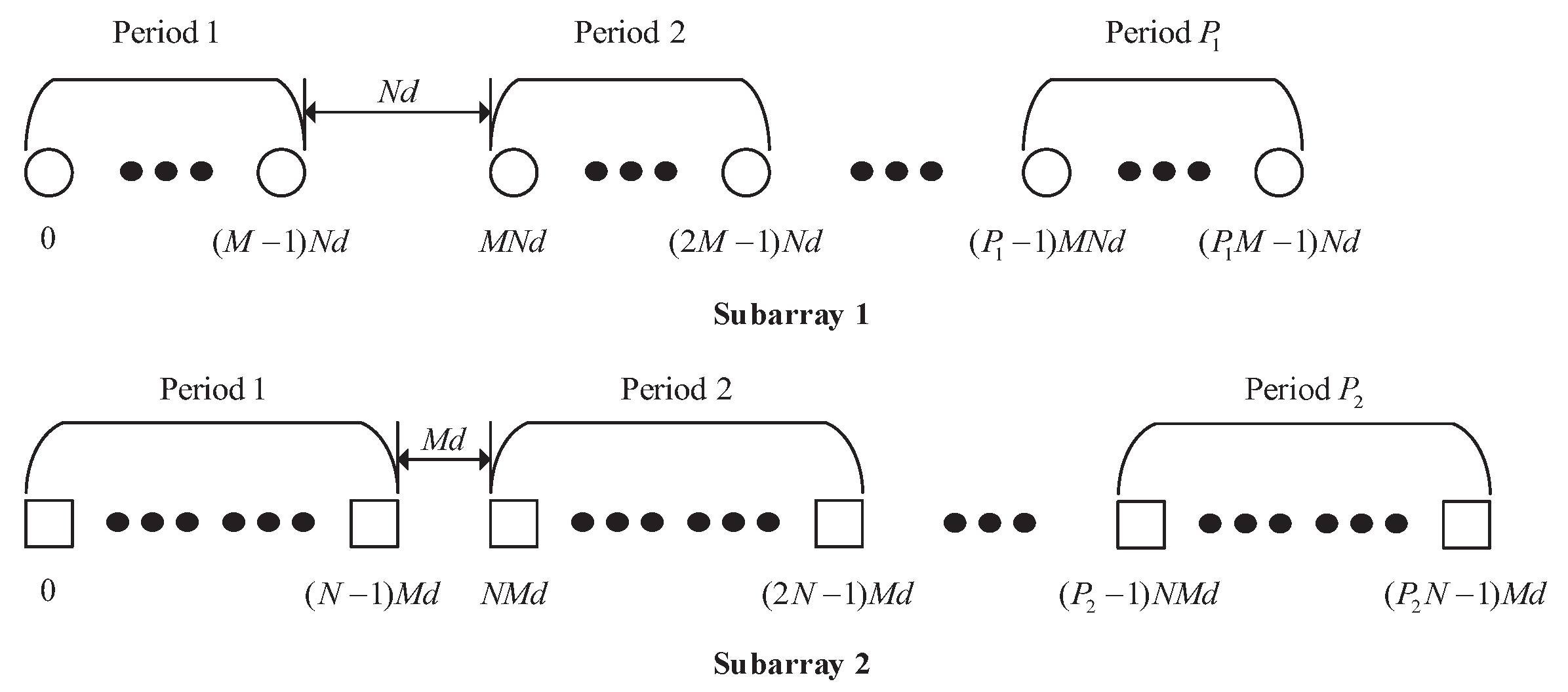
Firstly, we have a quick review of the CAMpS. As shown in
Figure 1, the CAMpS, which is the multiperiod extension of the prototype coprime array, consists of two uniform linear subarrays. Subarray 1 contains
sensors with the intersensor spacing of
N units, and Subarray 2 contains
sensors with the intersensor spacing of
M units. We use
d to denote the unit interelement spacing. Then, the sensors of the CAMpS are located at
, where
and
. Due to
M and
N being coprime, there are
common elements between the two subarrays. Hence, the number of the elements in the CAMpS is
. For convenience, in the following sections of this paper, we normalize all the locations by the unit interelement spacing
d.
Applying the VNCM method to the CAMpS, the resulting virtual array can be represented as
where
is the diff–sum set,
is the difference set,
is the non-negative sum set and
is the nonpositive sum set.
When choosing the CAMpS in
Figure 1 as the basic array model,
can be expressed as the following union set,
where
is the cross-difference set between
and
,
is the mirrored set of
,
is the self-difference set of
and
and
is the mirrored set of
. Similarly, the total sum set
can also be expressed as a union set
where
is the self-sum set of
and
,
is the mirrored set of
,
is the cross-sum set between
and
,
is the mirrored set of
.
4.2. The Properties of the Diff–Sum Set for the CAMpS
Without loss of generality, we assume the period of Subarray 1 is no larger than the period of Subarray 2, that is, . Denote and as the location set of Period i in Subarray 1 and the location set of Period j in Subarray 2.
According to [
30,
31], some properties of the difference set for the CAMpS have been summarised as follows:
- (1)
contains all the consecutive lags in the range .
- (2)
When , the difference set contains all the consecutive lags in the range .
- (3)
When , the result becomes .
Combining these properties, we can find that when M and N are fixed, the maximum value in the consecutive range of is determined by the period of Subarray 2, and the minimum value is determined by the period of Subarray 1. Considering the consecutive range of , when , both the minimum and the maximum have the same absolute value as and the two values are only related to . When , the two values have greater absolute value than since some holes in with can be filled by the cross-difference results between and . Thus, we can obtain the following two conclusions: (1) When , the difference set for the CAMpS has the same consecutive range as that for a simplified CAMpS of which the two subarrays are respectively and . (2) When , the equivalent array is a simplified CAMpS of which the two subarrays are respectively and .
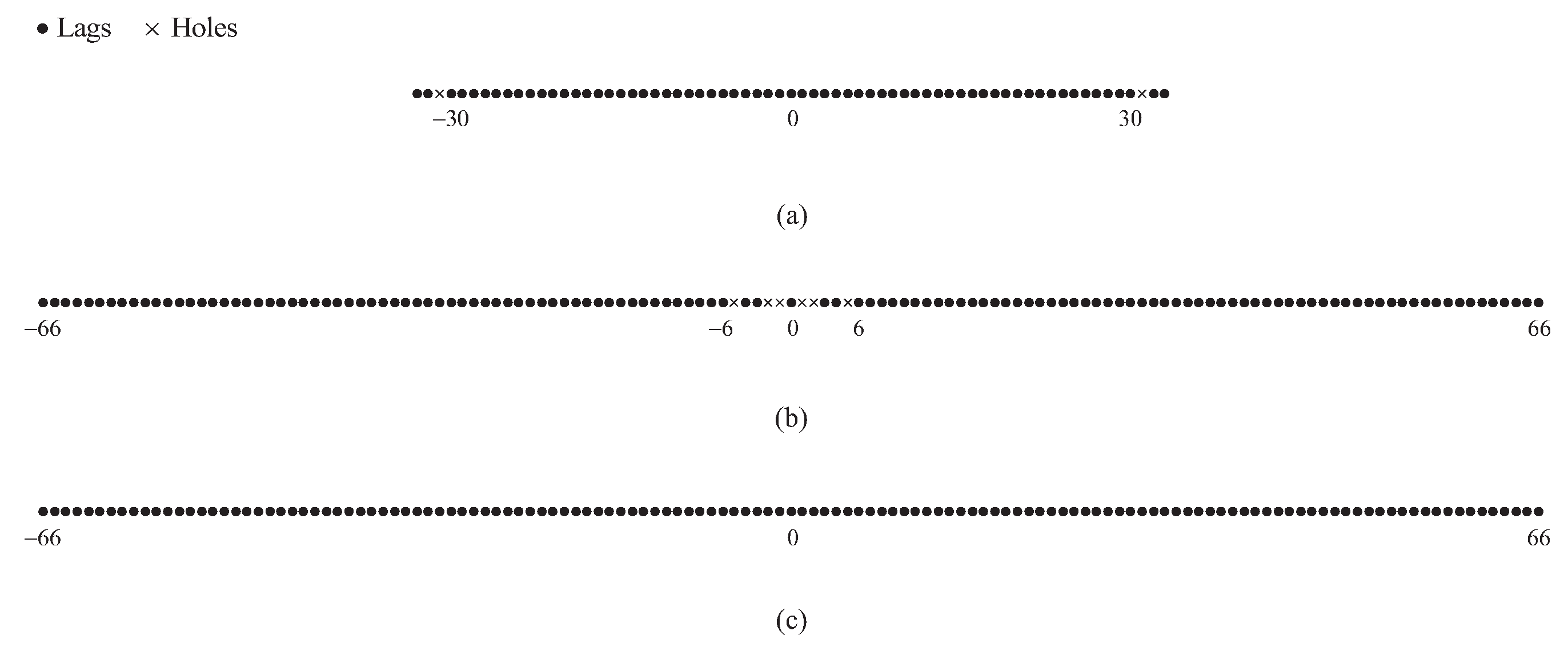
In
Figure 2, we assume
and show two examples of the difference sets for the CAMpS with
and
as the illustrative examples of the above properties.
Figure 2 shows that the difference coarray is symmetrical with the zero point as the center. When
, the number of the consecutive elements in the difference coarray is
. When
increases to
, the result becomes
.
The following proposition reveals the properties of the non-negative sum set for the CAMpS. The properties of the nonpositive sum set can be deduced by reversing the results of the following proposition.
Proposition 1. The following facts hold for and :
- (a)
The consecutive range of is .
- (b)
When , the non-negative sum set contains all the consecutive lags in the range .
- (c)
When : with contains all the consecutive lags in the range ; when , the result becomes ; when , the result is .
- (d)
The non-negative sum set for the CAMpS has the same consecutive range as that for a simplified CAMpS whose two subarrays are respectively and .
In the proof of Proposition 1, we have proved that some holes in the cross-sum set can be aligned with the elements in the self-sum set. Thus,
has a wider consecutive range than
. In addition, when
M and
N are fixed, the maximums in the consecutive range of
and
are determined by the periods of the two subarrays and the minimum is fixed. In
Figure 3, we assume
and show two examples of the non-negative sum coarray for the CAMpS with
and
as the illustrative examples of the above properties. It is obvious that when the period of one subarray adds 1, the maximums in the consecutive range of
and
would add
. Since
is the mirrored set of
, the consecutive range of the total sum set
is symmetrical with the zero point as the center. Then, combining Proposition 1 and the properties of the difference set, we give the properties of the diff–sum set
for the CAMpS in the following proposition. Defining
,
and
, we conclude:
Proposition 2. When , the consecutive range of for the CAMpS is . When , the consecutive range of is summarised based on the following three cases: (1) when , the consecutive range is ; (2) when , the consecutive range is ; (3) when , the consecutive range is .
According to Proposition 2, in
Table 1, we summarize the DOF (the number of the consecutive lags) of
. The corresponding MNDS of the VNCM method can also be obtained by the equation MNDS = DOF−3.
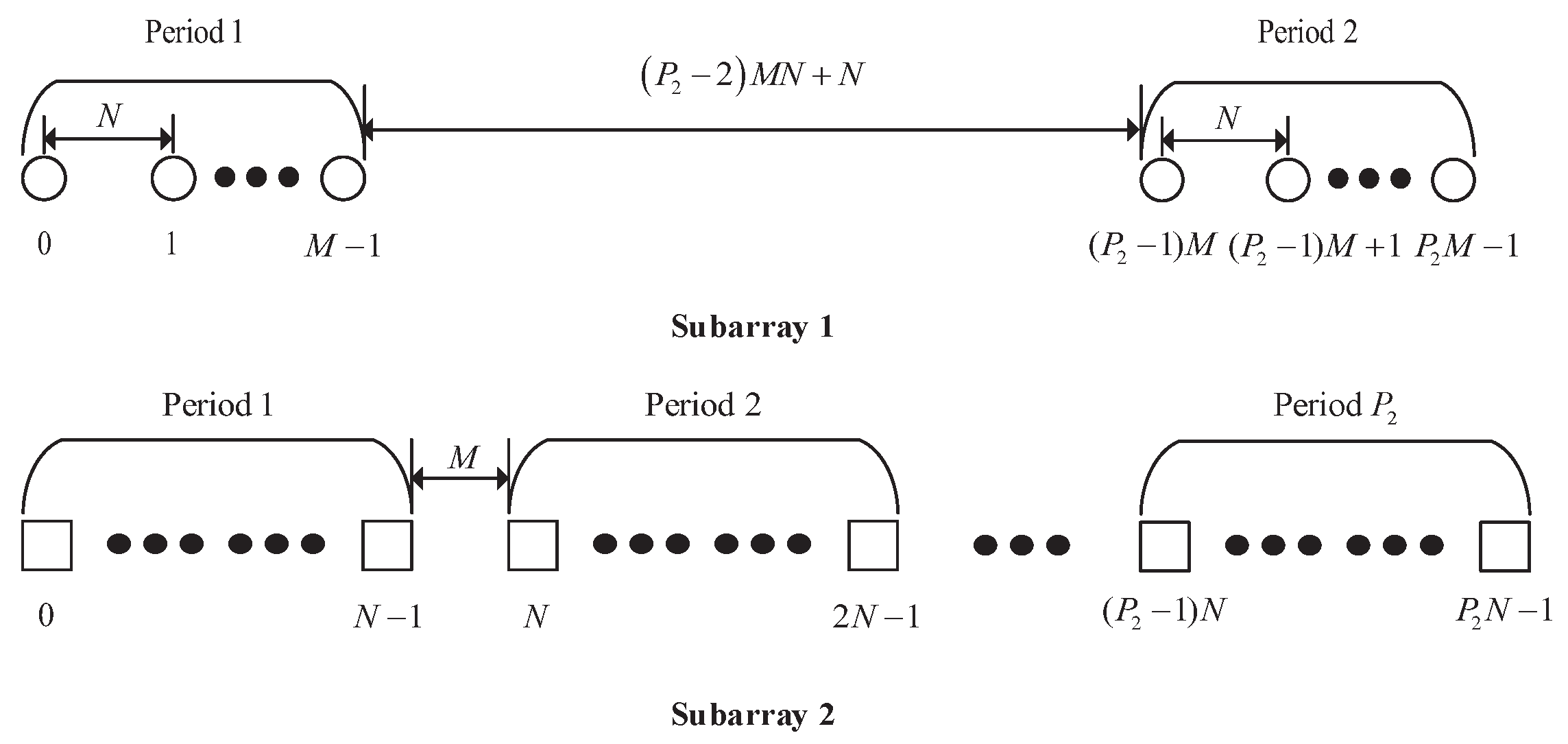
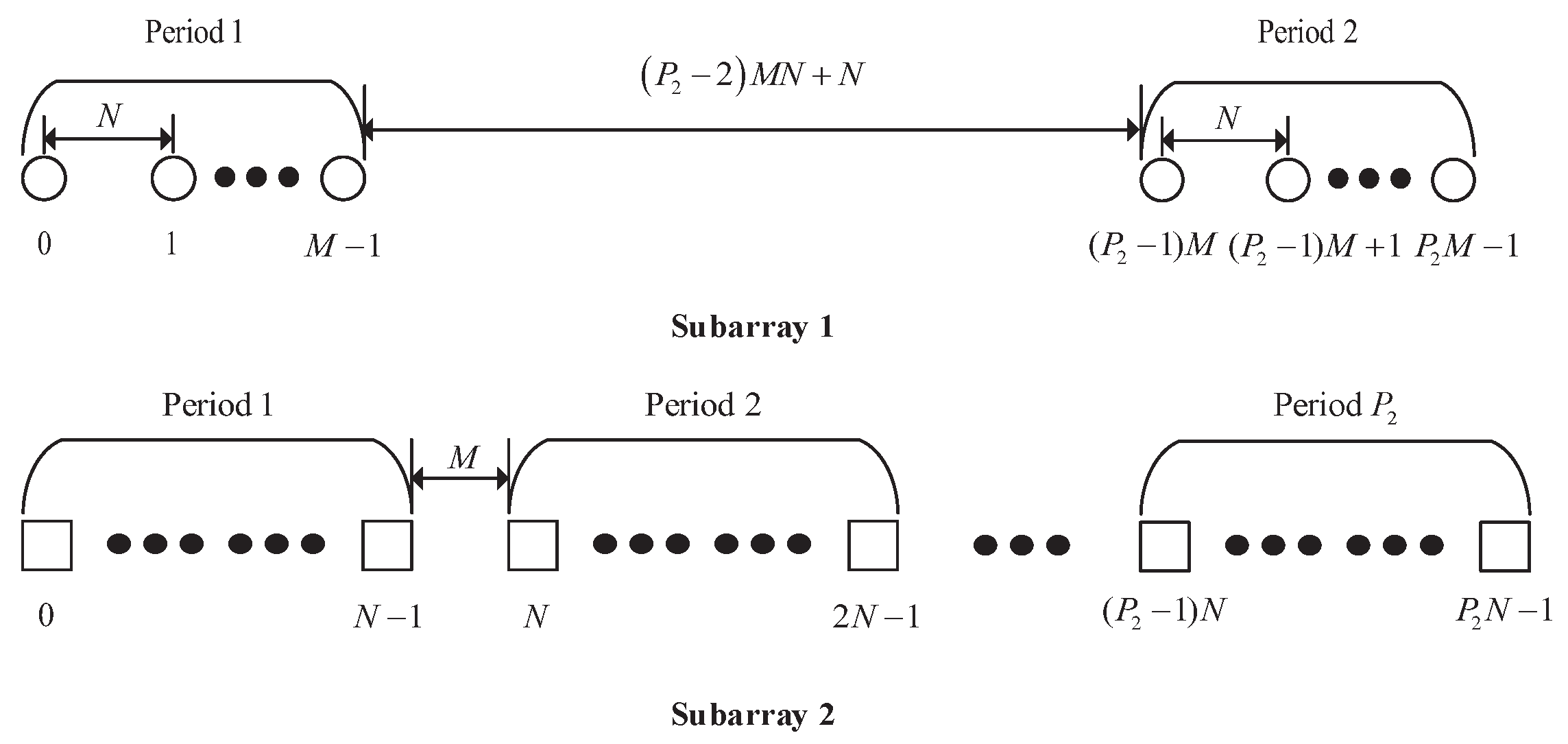
4.3. The Diff–Sum Coprime Array with Multiperiod Subarrays
According to the properties of the difference set, Propositions 1 and 2, the consecutive range of
for the CAMpS is the same as that of
for a simplified CAMpS, of which the location sets of the two subarrays can be expressed as
and
. We name the equivalent array as the diff–sum coprime array with multiperiod subarrays (DsCAMpS). Since the DOF of the DsCAMpS with
is greater than that with
, we define
in the DsCAMpS. Then, the structure of the DsCAMpS can be shown in
Figure 4.
When
, Subarray 1 in the DsCAMpS contains 2 periods, of which each period contains
M sensors with the intersensor spacing of
N units. The displacement between the two periods is
. Subarray 2 in the DsCAMpS contains
sensors with the intersensor spacing of
M units. The location set of the DsCAMpS can be expressed as
Between the two subarrays, there are two common elements which locate at 0 and
. Thus, the number of the elements in the DsCAMpS is
. When
, the DsCAMpS becomes the prototype coprime array with
sensors, which means the prototype coprime array is a special kind of the DsCAMpS. Defining
,
and
, we can show the DOF of the diff–sum coarray for the DsCAMpS in
Table 2. Compared with the CAMpS, the DsCAMpS can achieve a higher number of DOFs when
. When
, the two arrays have the same structure and DOF.
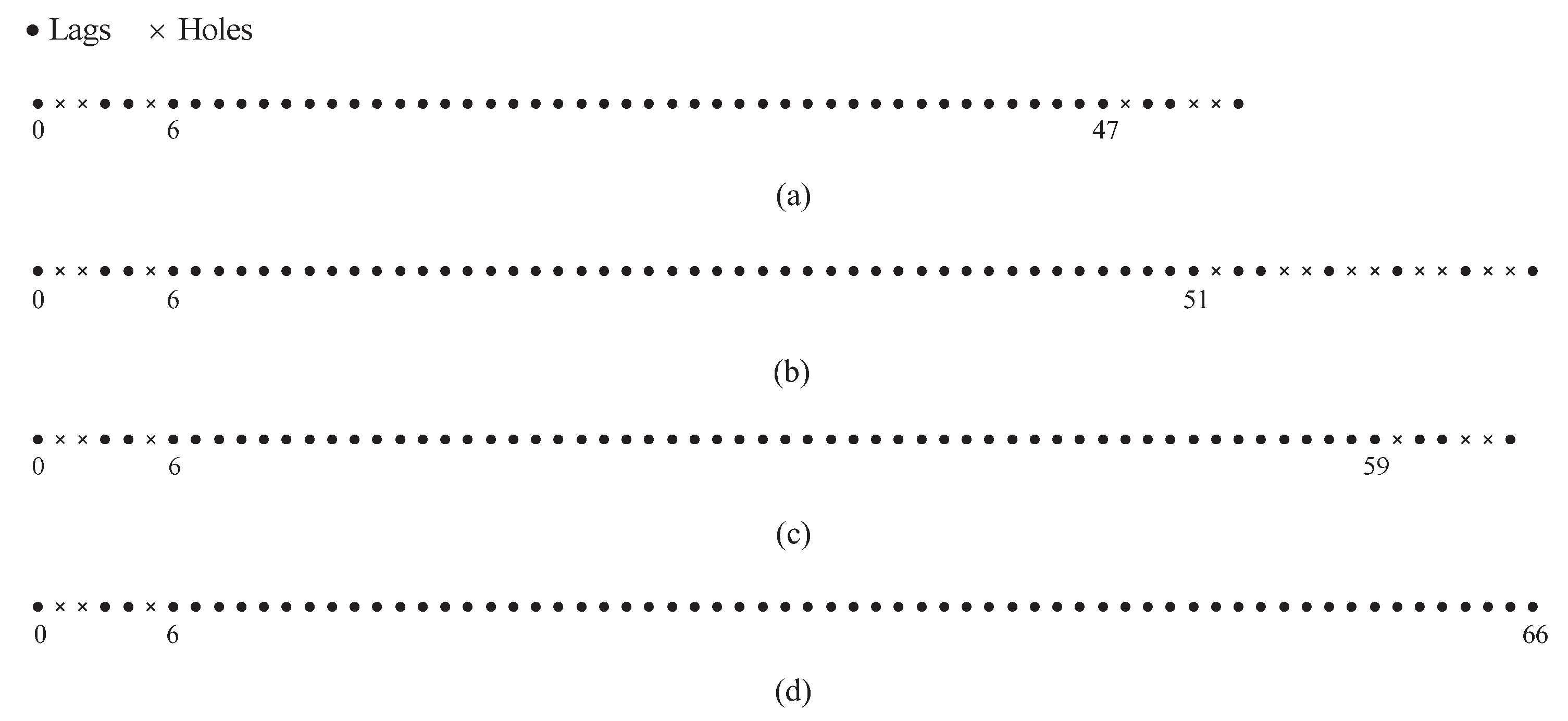
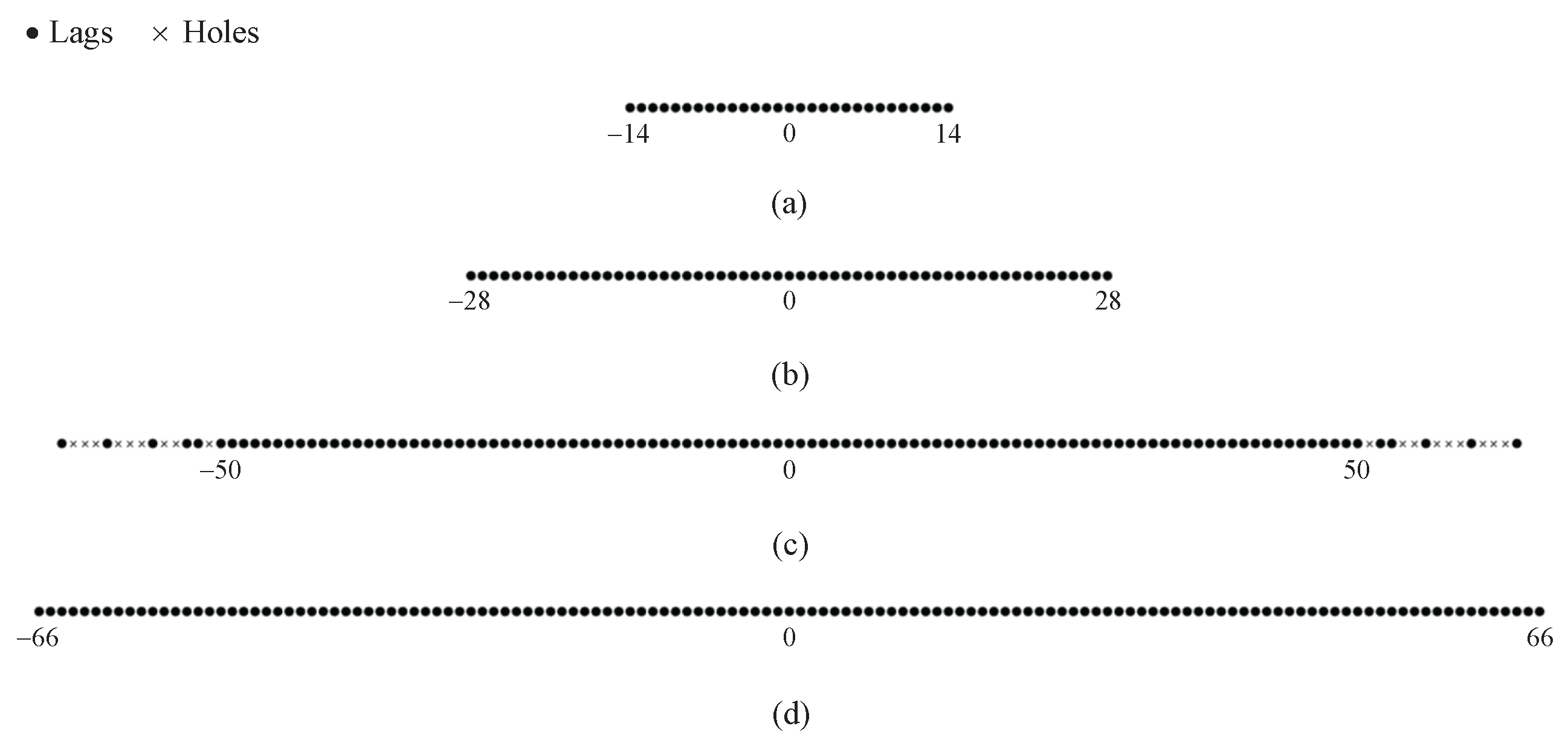
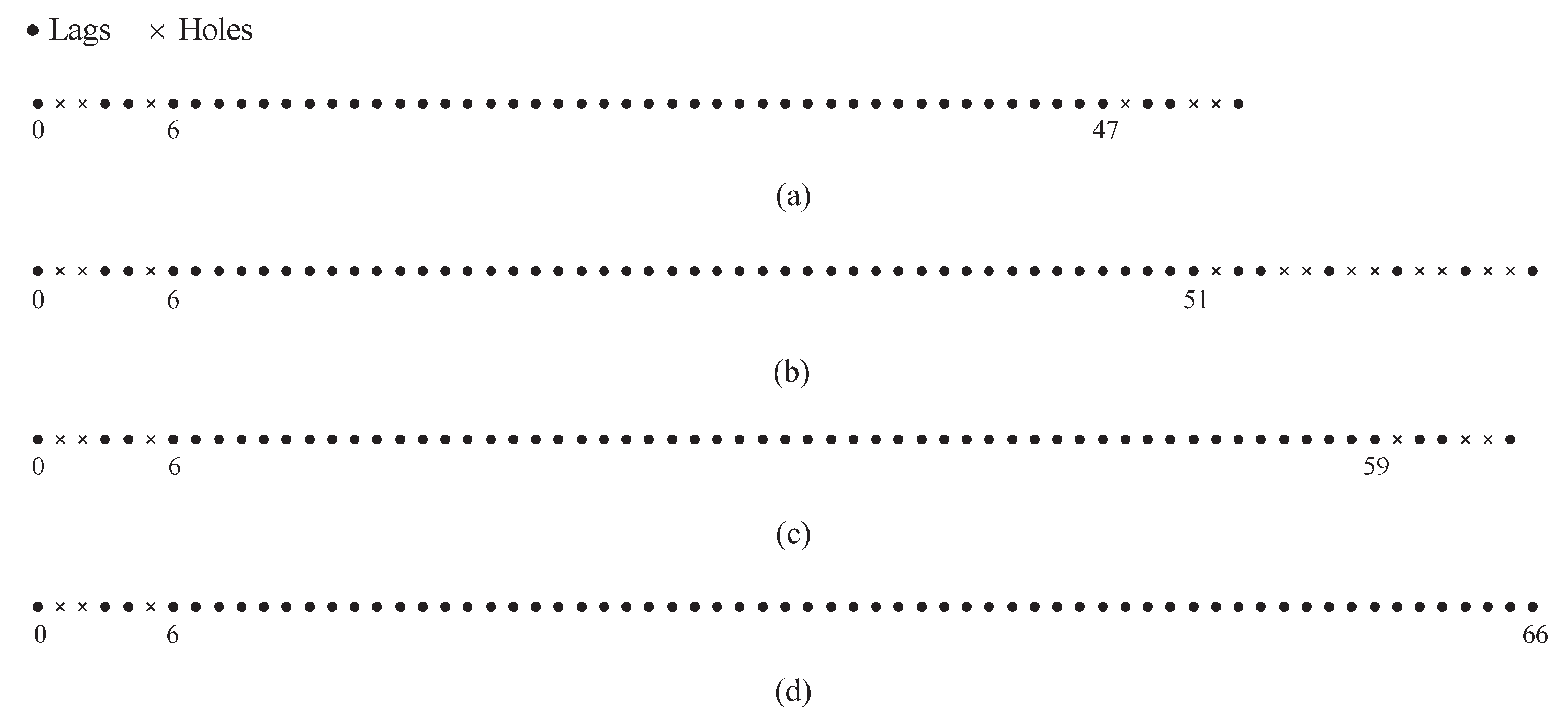
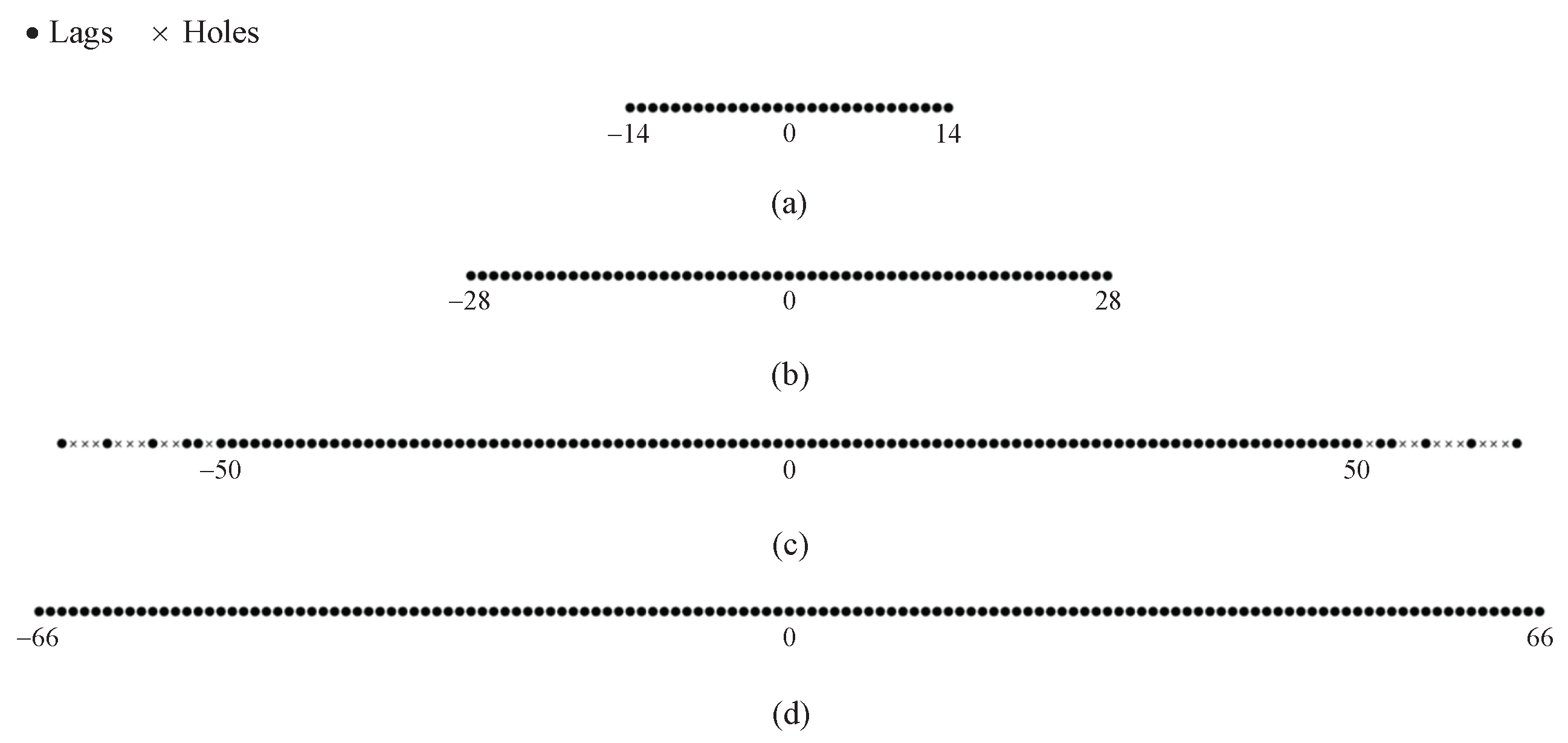
In
Figure 5, we depict the consisting sets of the diff–sum coarray for the DsCAMpS with
.
Figure 5a shows that the consecutive range of the difference set is
, which is symmetrical with the zero point as the center.
Figure 5b depicts the total sum set
, which contains all the consecutive lags in the range
. The consecutive range of the difference set for the DsCAMpS with
overlaps with part of the consecutive range of the total sum set. Thus, as shown in
Figure 5c, the diff–sum set, which is the union set of
and
, contains all the consecutive lags in the range
.
Figure 5 verifies the properties of the diff–sum coarray for the DsCAMpS and the complementarity between the corresponding difference set and sum set.
5. Simulation Results
In this section, we consider the sensor number of all configurations as . The unit interelement spacing is . Since the DsCAMpS and the CAMpS are the same when , we consider the period in Subarray 2 of both the CAMpS and the DsCAMpS satisfying . The configurations utilized in this section are respectively the CAMpS with , the DsCAMpS with and the ULA .
5.1. DOF Comparison
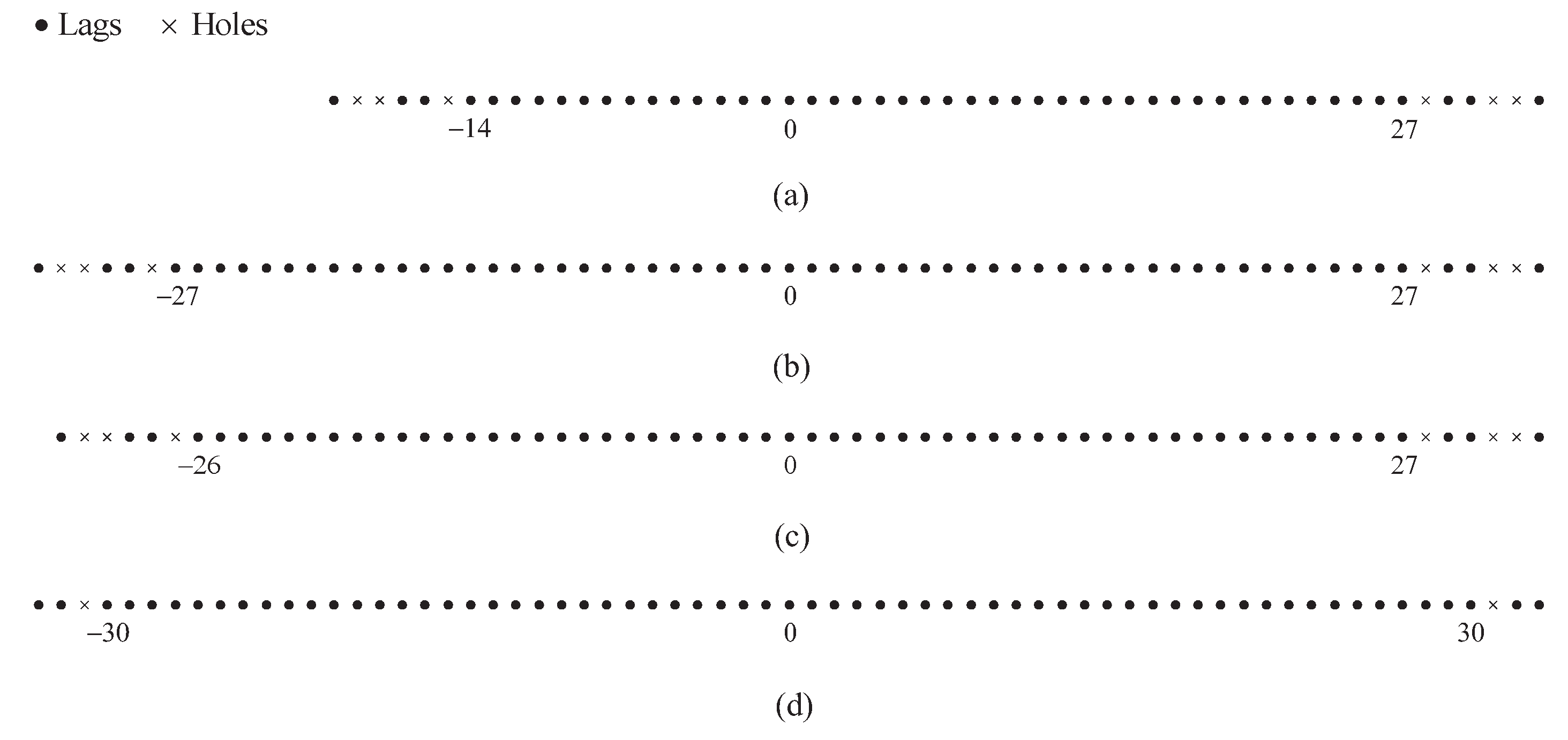
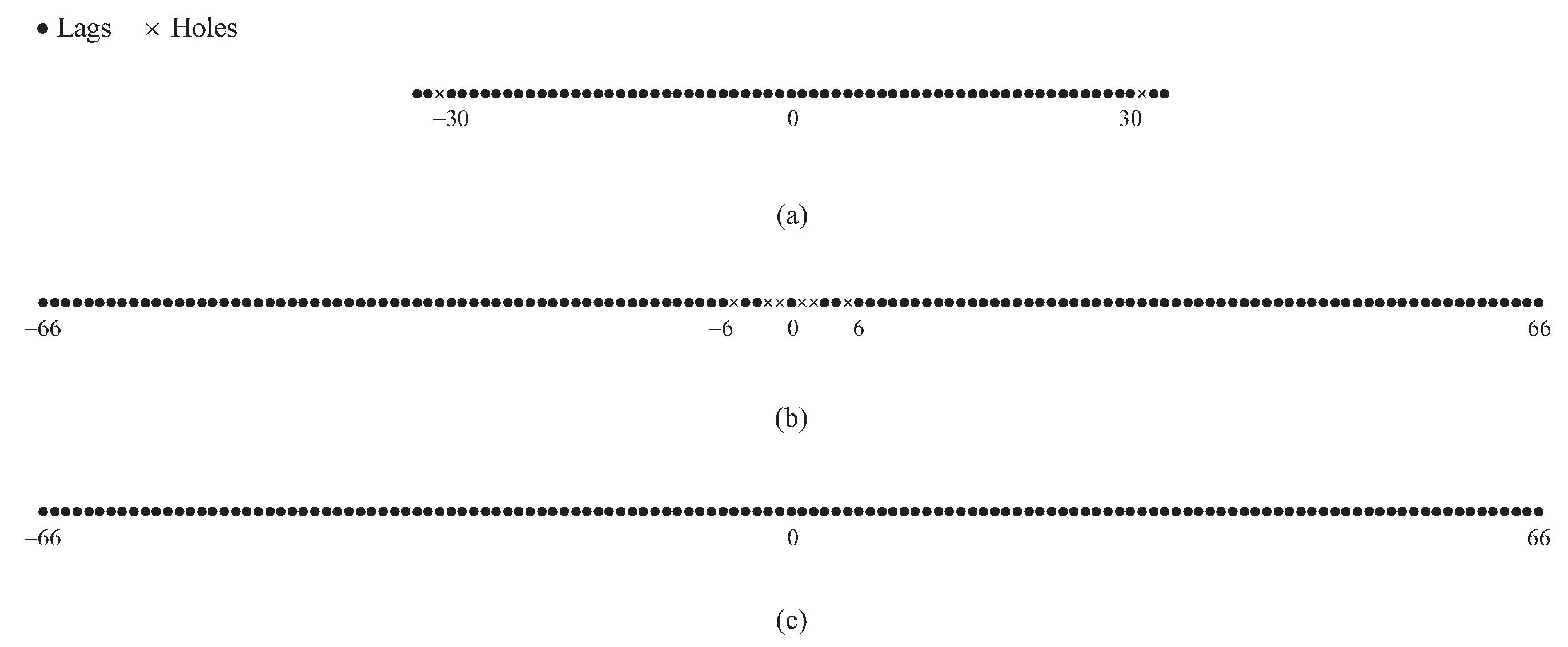
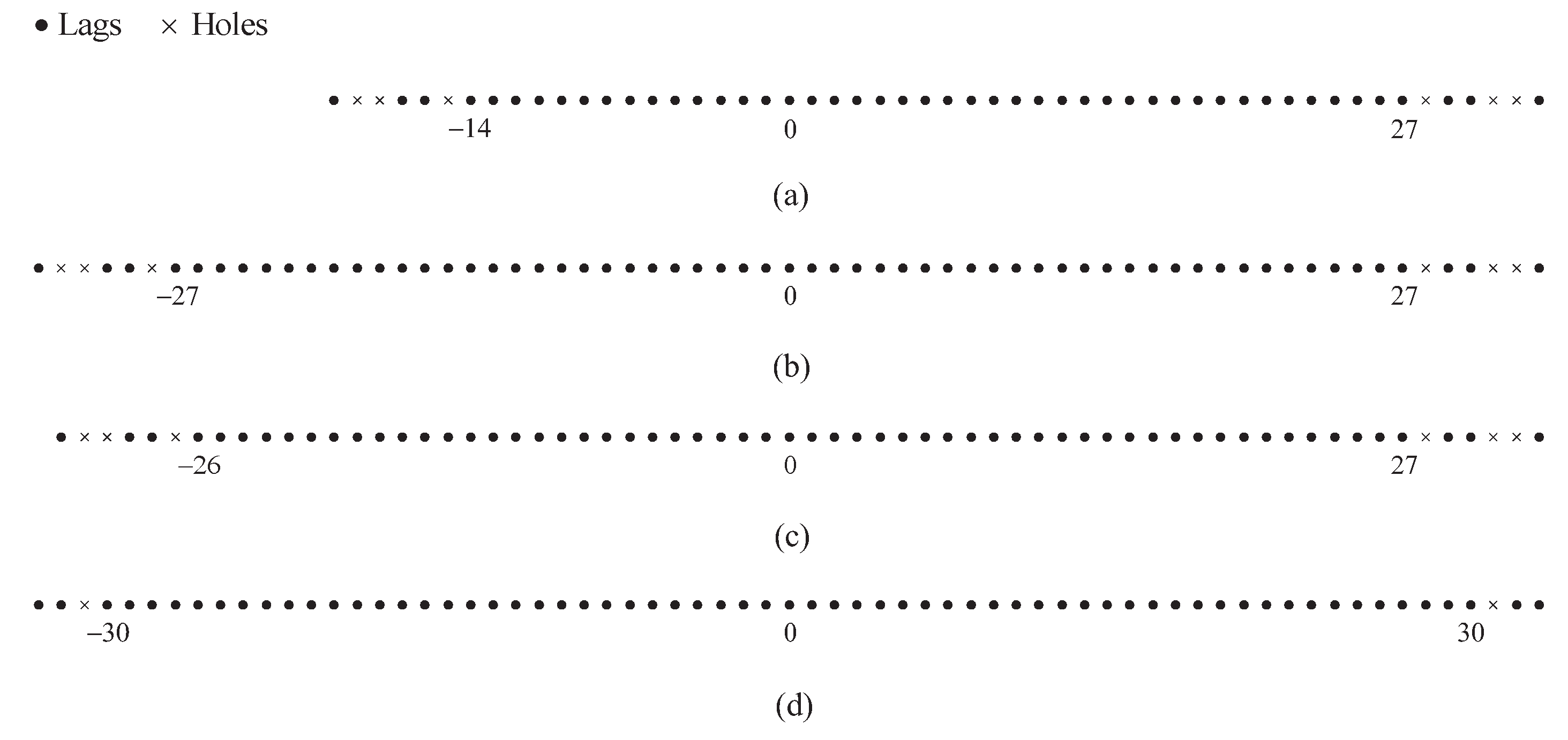
Figure 6 depicts four virtual configurations, which are respectively the traditional NC virtual array for the ULA, the diff–sum coarrays for the ULA, the CAMpS and the DsCAMpS. The traditional NC virtual array is constructed in the NC MUSIC algorithm and the three diff–sum coarrays are obtained by using the VNCM algorithm. As shown in
Figure 6a, the traditional NC virtual array for the ULA, which consists of the physical array and its flipped array, contains all the consecutive lags in the range
. In
Figure 6b–d, the consecutive ranges of the three diff–sum coarrays for the ULA, the CAMpS and the DsCAMpS are respectively
,
and
. Comparing
Figure 6a,b, it is obvious that the diff–sum coarray achieves a higher number of DOFs than the traditional NC virtual array. From
Figure 6b–d, we can find that the diff–sum coarray constructed by using the sparse array has a larger consecutive range than that constructed by using the ULA. In addition, the diff–sum coarray for the DsCAMpS contains more consecutive lags than that for the CAMpS with the same number of sensors.
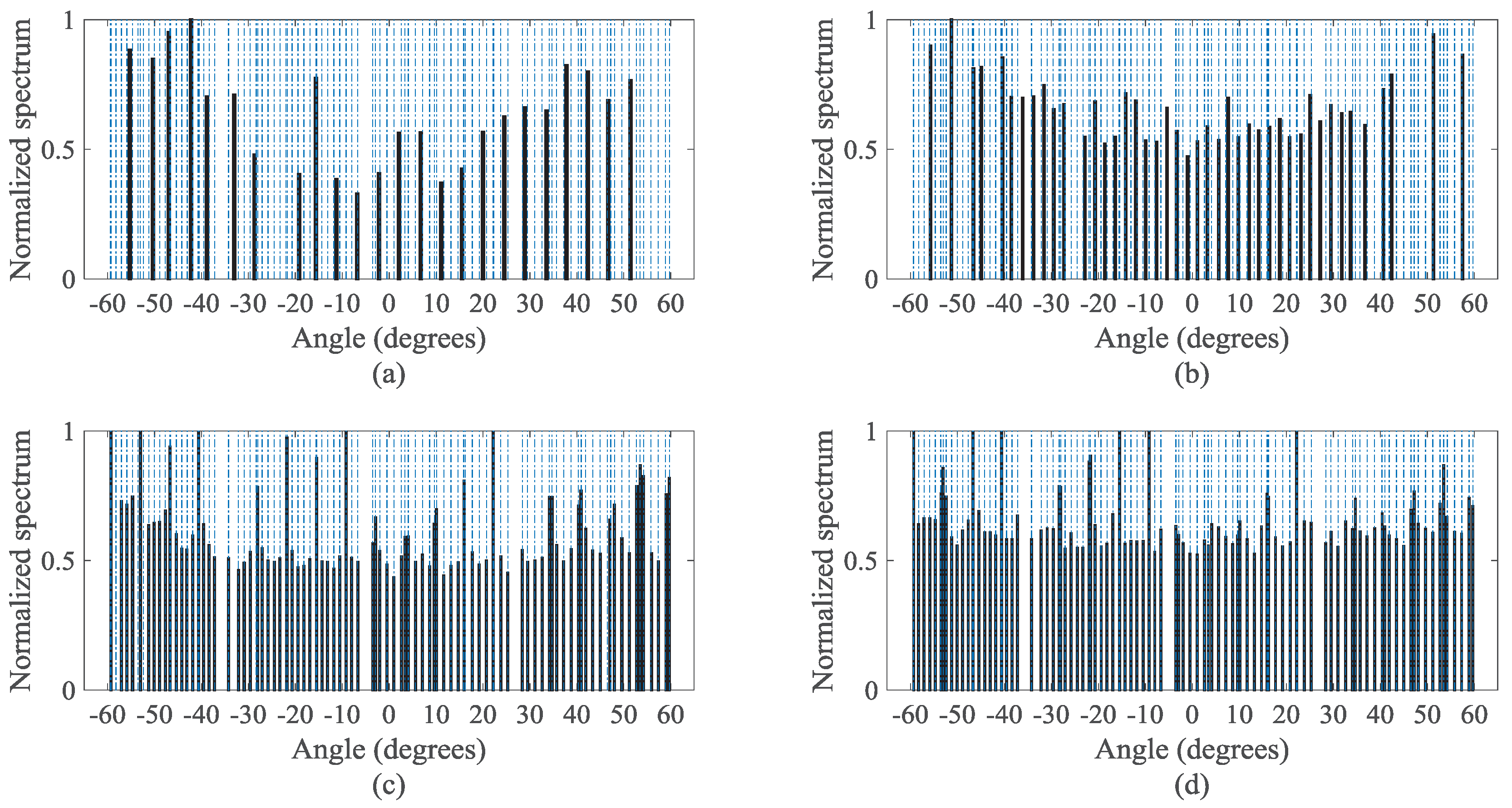
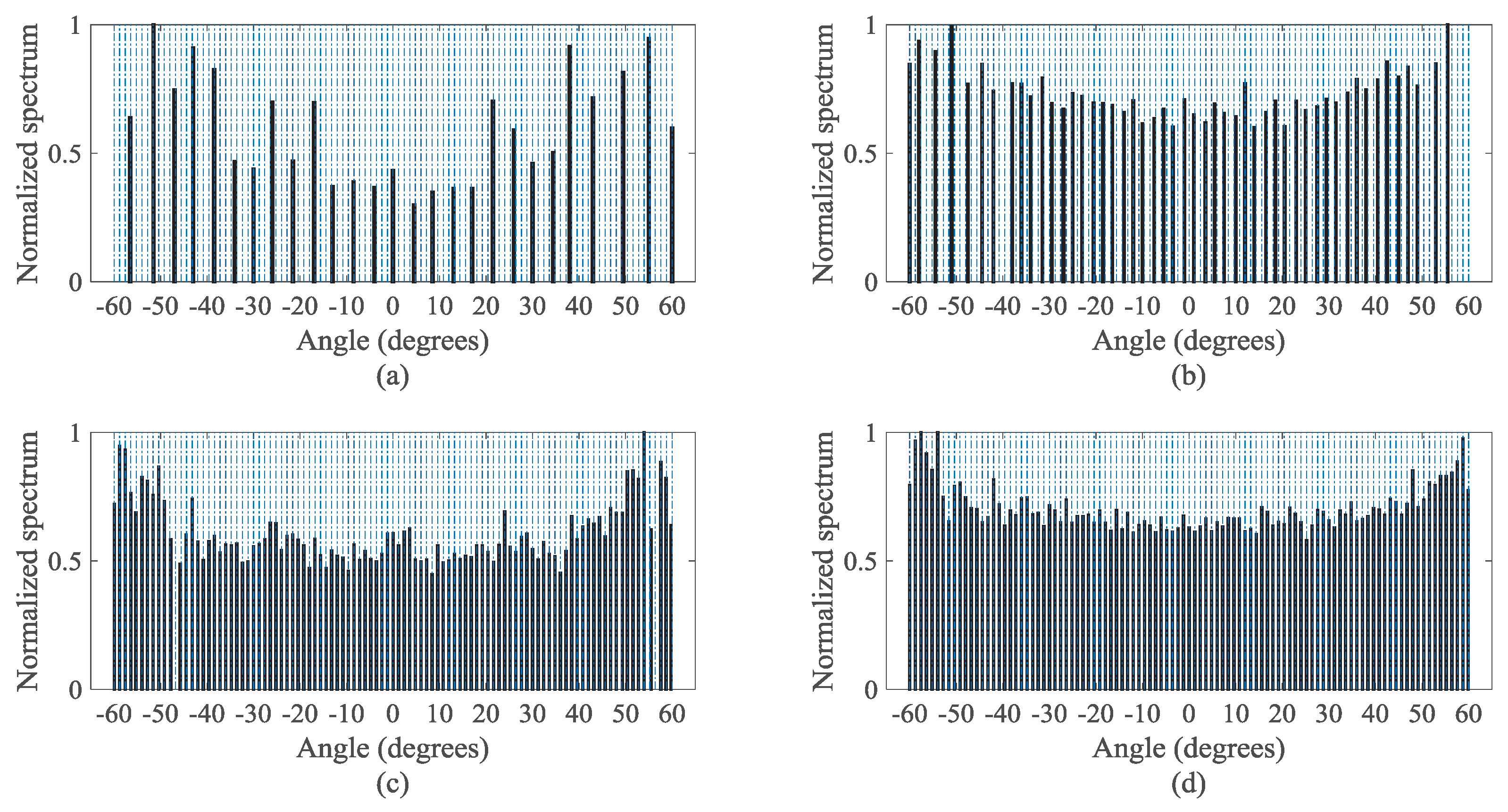
5.2. MUSIC Spectra
Figure 7 presents the normalized MUSIC spectra of the uniform distributed signals detected by the four virtual configurations in
Figure 6. Here, the frame length
L, the number
of the frames in the VNCM method and the snapshots
in the NC MUSIC satisfy
. We consider the input SNR = 10 dB, and we suppose
sources, which are uniformly distributed between
and
. It is noted that the frame length is actually the snapshots in one frame.
Figure 7d shows that the DsCAMpS with the VNCM used can detect all the 101 sources since the DOF of the diff–sum coarray for the DsCAMpS is 133. The corresponding MNDS is 130. According to
Figure 7a–c, the other three virtual configurations fail to obtain the correct DOA estimations. This is because the numbers of the consecutive lags in the traditional NC virtual array for the ULA, the diff–sum coarrays for the ULA and the CAMpS are respectively 29, 57 and 101. Then, the corresponding MNDSs are respectively 28, 54 and 98. Thus, with the same number of sensors, the DsCAMpS with the VNCM used achieves a better performance than the ULA with the NC MUSIC used, the ULA with the VNCM used and the CAMpS with the VNCM used.
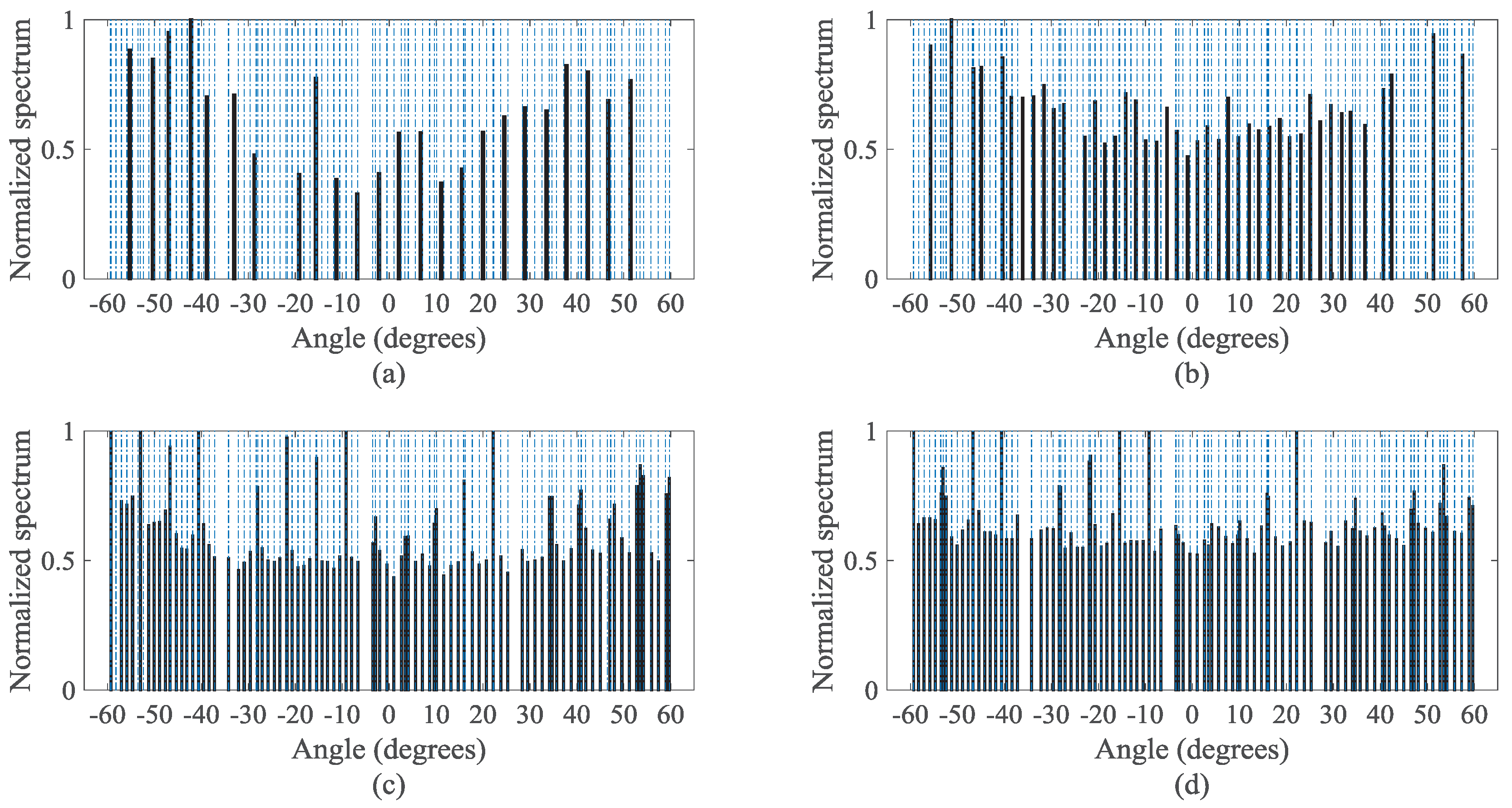
In order to demonstrate the estimated DOAs when the signal source distribution changes, in
Figure 8, we further simulate the normalized MUSIC spectra of the non-uniformly distributed signals detected by the four virtual configurations. Here,
sources are non-uniformly distributed between
and
, and the other parameters are the same as those in
Figure 7. The non-uniform distribution of sources could make some DOAs get very close, which may deteriorate the DOA estimation performance. However,
Figure 8d shows that the DsCAMpS with the VNCM used can still detect all the sources. In contrast, the other three virtual configurations fail to obtain the correct DOA estimations, which is shown in
Figure 8a–c. Thus, regardless of whether the signal sources are uniformly distributed or non-uniformly distributed, the DsCAMpS with the VNCM used achieves a better performance than the other three virtual arrays.
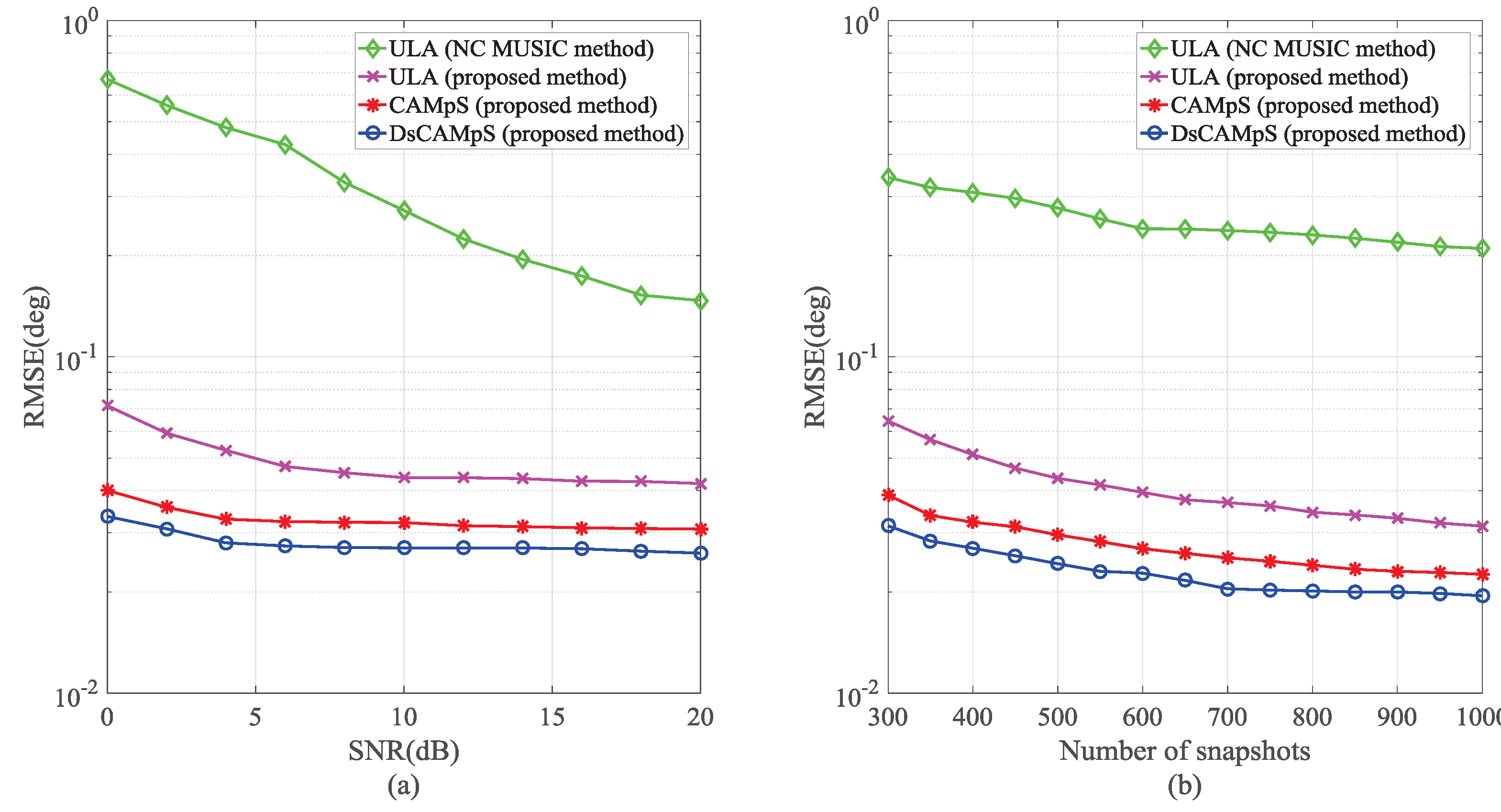
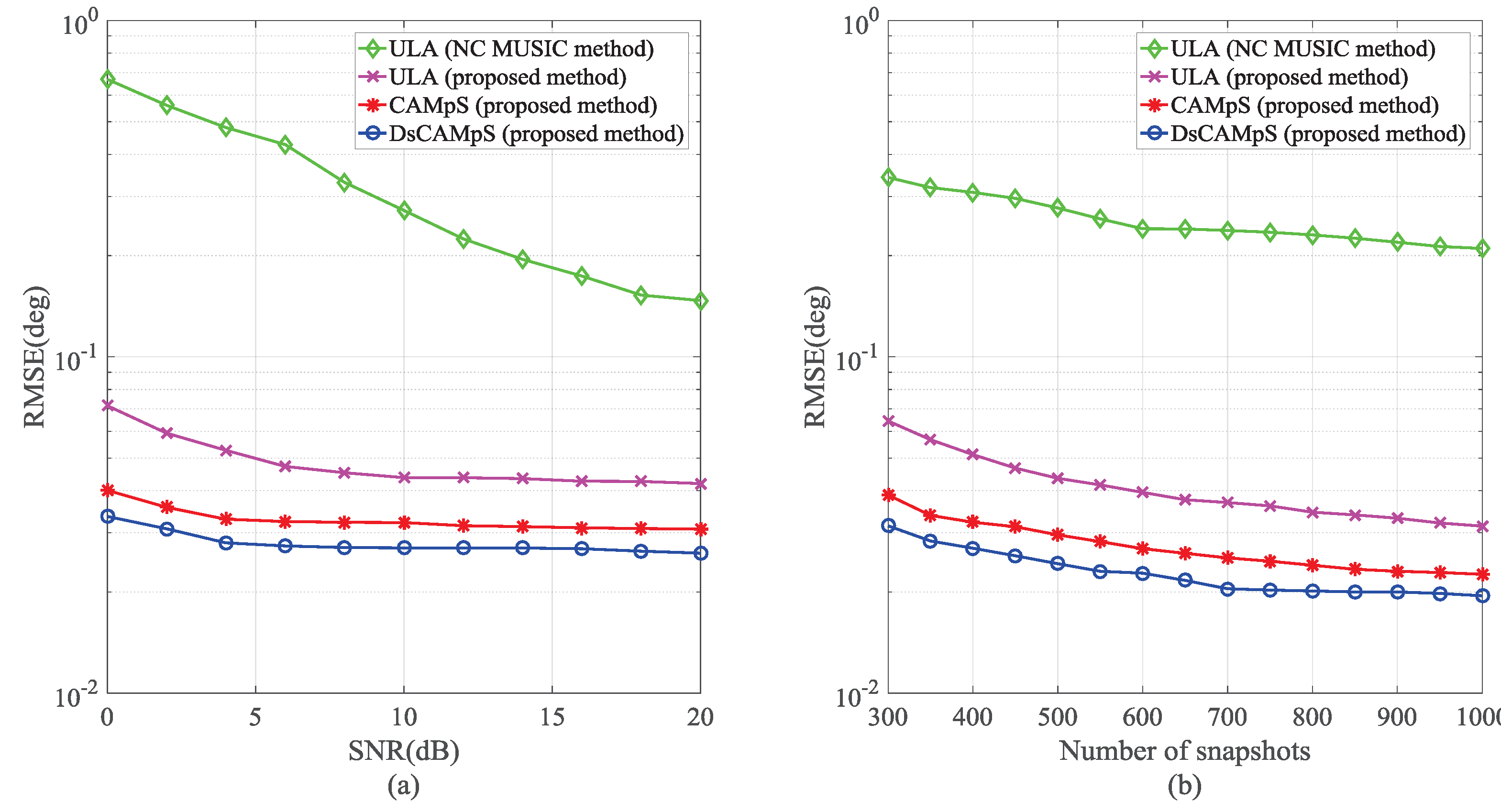
5.3. Root Mean Square Error (RMSE)
We further conduct Monte Carlo simulations to compare the DOA estimation performance of the four virtual configurations in
Figure 6. Here, we use the RMSE of the estimated DOAs as the performance metric. The RMSE is defined as
where
J is the number of Monte Carlo simulations,
denotes the real DOA of the
qth signal source and
denotes the estimate of
for the
jth trial,
. In all the simulations, we consider the signal source number
and utilize 500 independent Monte Carlo simulations.
Figure 9a depicts the RMSE performance as a function of the input SNR. In this simulation, we suppose
. It is clear that all the arrays with the VNCM used outperform the ULA with the NC MUSIC used due to the diff–sum coarray containing more consecutive elements than the traditional NC virtual array. Among the three arrays with the VNCM used, the DsCAMpS achieves the best performance. In
Figure 9b, we suppose SNR = 10 dB to compare the RMSE performance as a function of the snapshots. Here, we consider
. From the results, all the arrays with the VNCM used still perform much better than the ULA with the NC MUSIC used. Compared with the RMSE of the ULA and the CAMpS with the VNCM used, the RMSE of the DsCAMpS with the VNCM used is smaller. The results of the two simulations suggest that the diff–sum coarray achieves a higher number of DOF than the traditional NC virtual array and the DsCAMpS is a novel array of which the diff–sum coarray has higher DOF than that of the ULA and the CAMpS.




{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}