An Observation Capability Semantic-Associated Approach to the Selection of Remote Sensing Satellite Sensors: A Case Study of Flood Observations in the Jinsha River Basin


Abstract
:1. Introduction
1.1. Sensor Discovery and Selection
1.2. Sensor Ontology
1.3. Our Consideration
- (1)
- Covering the multilevel and multidimensional observation capability properties of the sensors. As defined in the Observations and Measurements (O&M) specification [47], the term “Observation” can consist of different observation types, including “Measurement” where the observation result is a numeric quantity, “CategoryObservation” where the observation result is a scoped name, “CountObservation” where the observation result is an integer number, “TruthObservation” where the observation result is a Boolean value, “TemporalObservation” where the observation result is a time-related object such as time instant, time period and date, “GeometryObservation” where the observation result is a space-related object such as the coordinate values of trajectory, position and location, and “ComplexObservation” where the observation result can be a more complex structure. In particular, this analogy yields the insight that sensor observation capability ontology should include the “MeasurementCapability,” “Category-ObservationCapability,” “Count-ObservationCapability,” “Truth-Observation Capability,” “Temporal-ObservationCapability,” “Geometry-ObservationCapability,” and “Complex-ObservationCapability” capability types.
- (2)
- Supporting multi-sensor observation association. Providing only a compiled list of available sensors is far from sufficient. Decision makers often seek access to associated observation capability information among those sensors to facilitate the development of an efficient observation schedule (such as which sensors over what intersecting observation area can provide complementary observations of an observed phenomenon). Therefore, the proposed SOCA ontology that considers the dynamic associations among different sensor objects must be used as an information model for the correlated discovery of multiple sensors.
2. A SOCA Ontology for Sensor Selection
2.1. An Application Scenario
2.2. Construction of SOCA Ontology
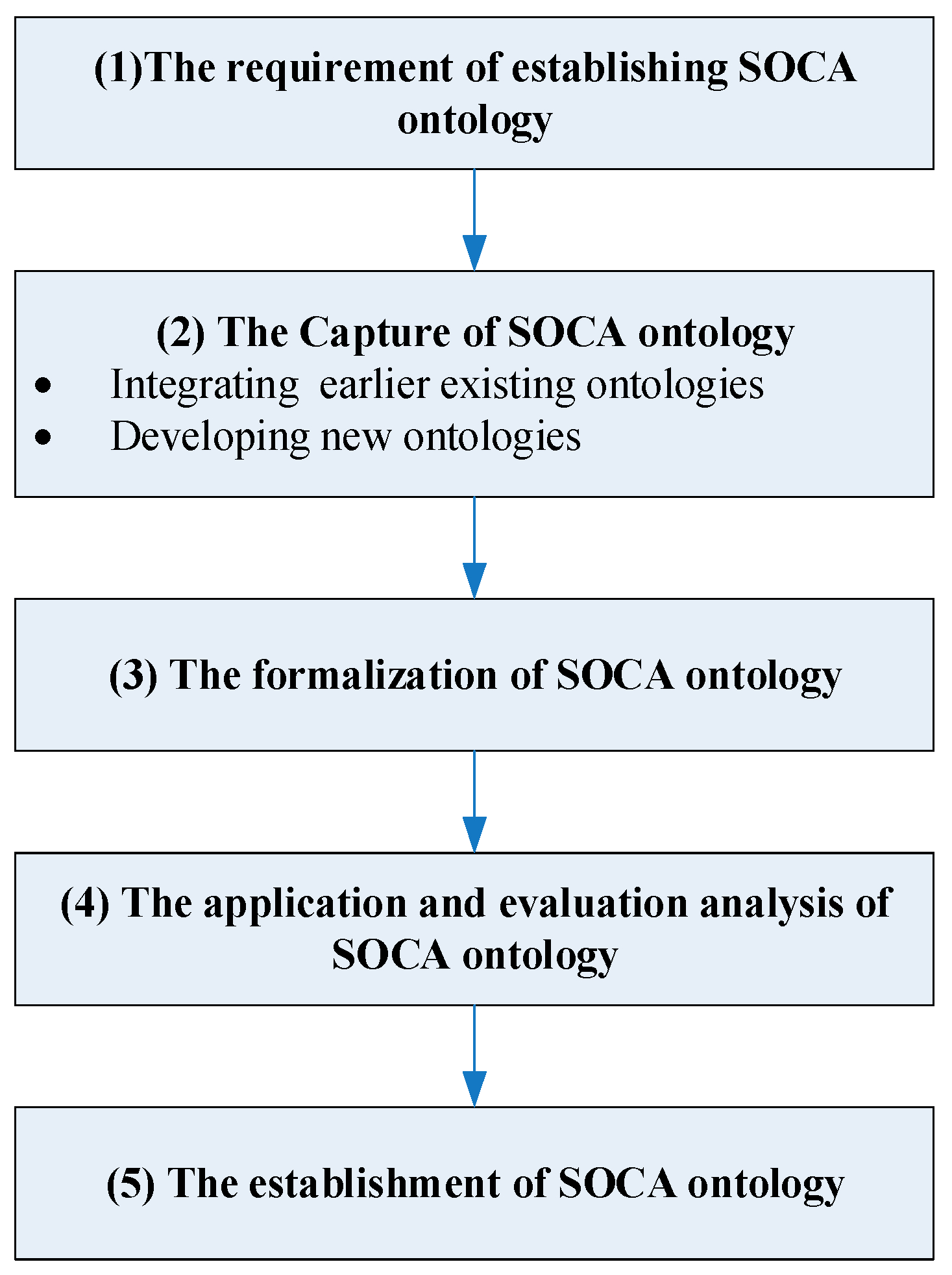
2.2.1. Skeletal Methodology for Designing SOCA Ontology
- The requirement of establishing SOCA ontology: clarifying why the SOCA ontology is being built and what its intended uses are to help the ontology developers identify the purpose and the range of the SOCA ontology, which has been clarified in Section 1.3 and Section 2.1.
- The capture of SOCA ontology: identifying the ontology design pattern and modules, defining core classes and relations, reusing existing ontologies (e.g., SSN), and developing new ontologies to facilitate the generation of the complete SOCA ontology.
- The formalization of SOCA ontology: representing the conceptualization captured in the previous stage in some formal language (e.g., Web Ontology Language (OWL)) and ontology building tool (e.g., Protégé).
- The application and evaluation analysis of SOCA ontology: according to the intended application purpose to evaluate the efficiency, feasibility, usage, and extensibility of the SOCA ontology by some specified use cases.
- The establishment of SOCA ontology: starting the confirmation and publication of the well-evaluated SOCA ontology to assist the established ontology sharing and extensive application.
2.2.2. SOCA Design Pattern
Stimuli
Task
Sensors
Feature of Interest
Observed Property
Observation
Observation Capability
Observation Capability Feature
SensorSet
2.2.3. SOCA Modules and Core Classes
Sensor Module
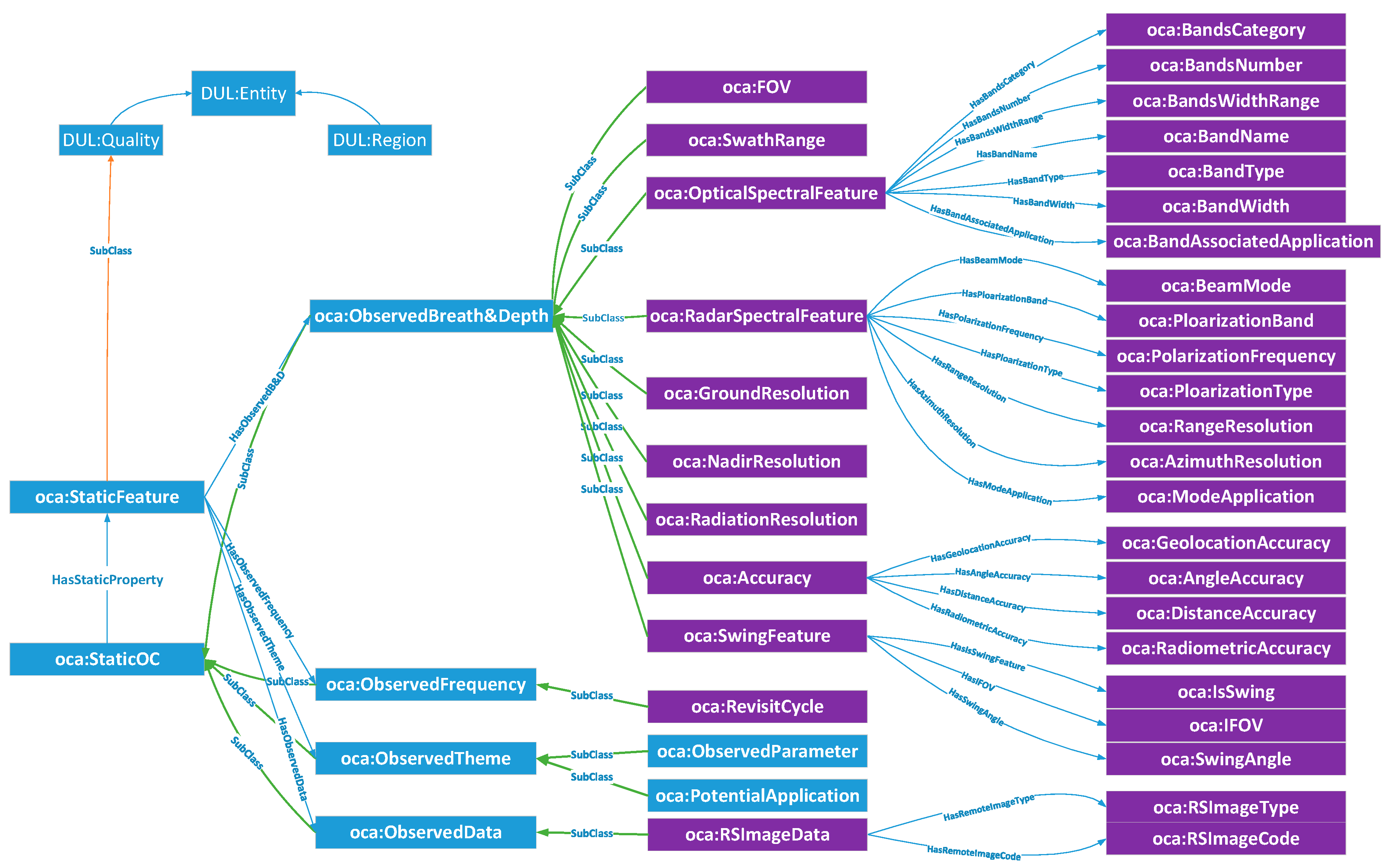
StaticOC Module
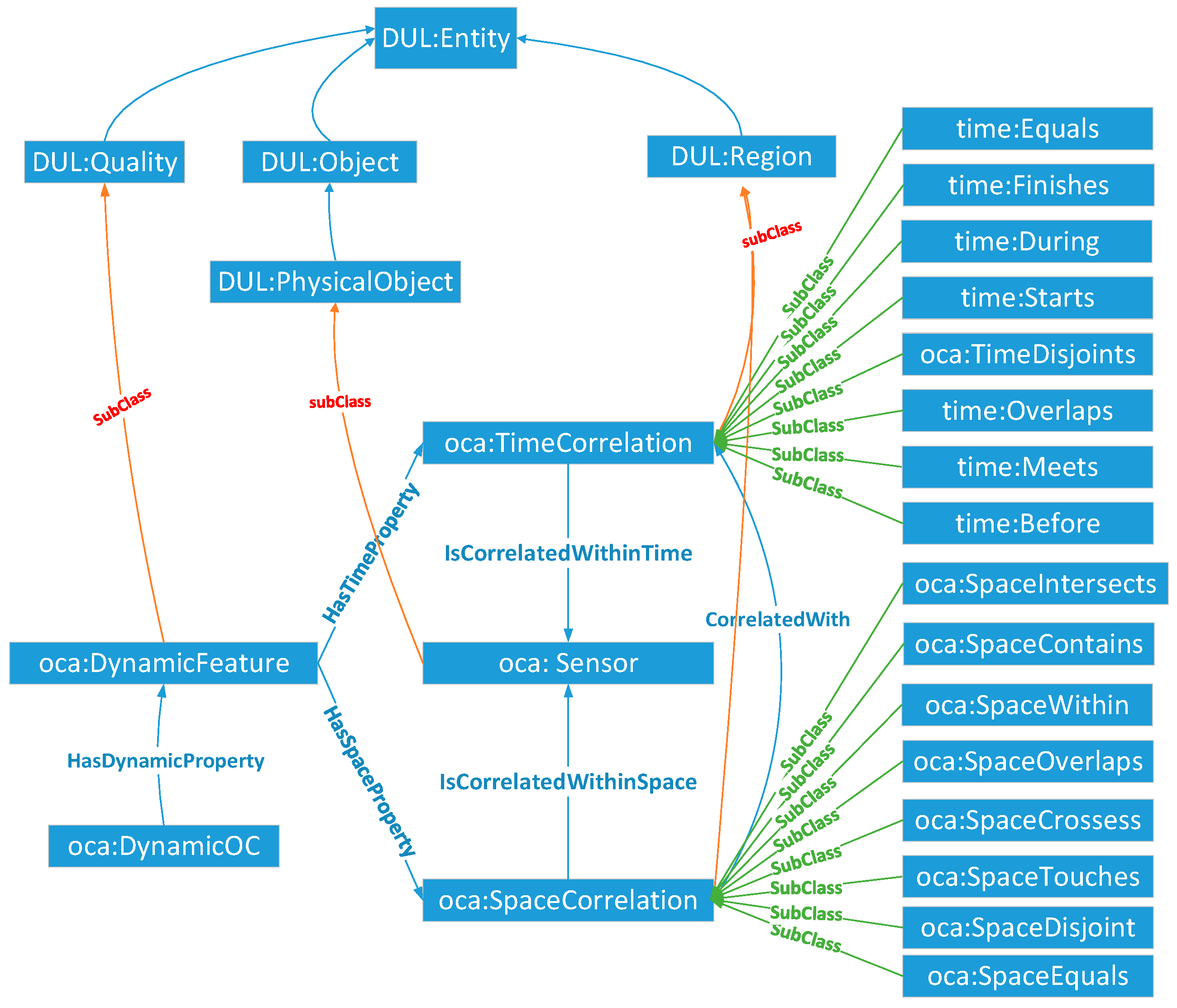
DynamicOC Module
SensorSet Module
2.2.4. Formalization of SOCA Ontology
3. SOCA Ontology-Based Observation Capability Semantic Association Implementation
3.1. Overall Framework
3.2. Static Observation Capability Association
3.3. Dynamic Observation Capability Association
4. Sensor Selection Experiment for Flood Monitoring in the Jingsha River Basin
4.1. Overview of the Study Area
4.2. Observation Query Inputs of the Flood Monitoring Task
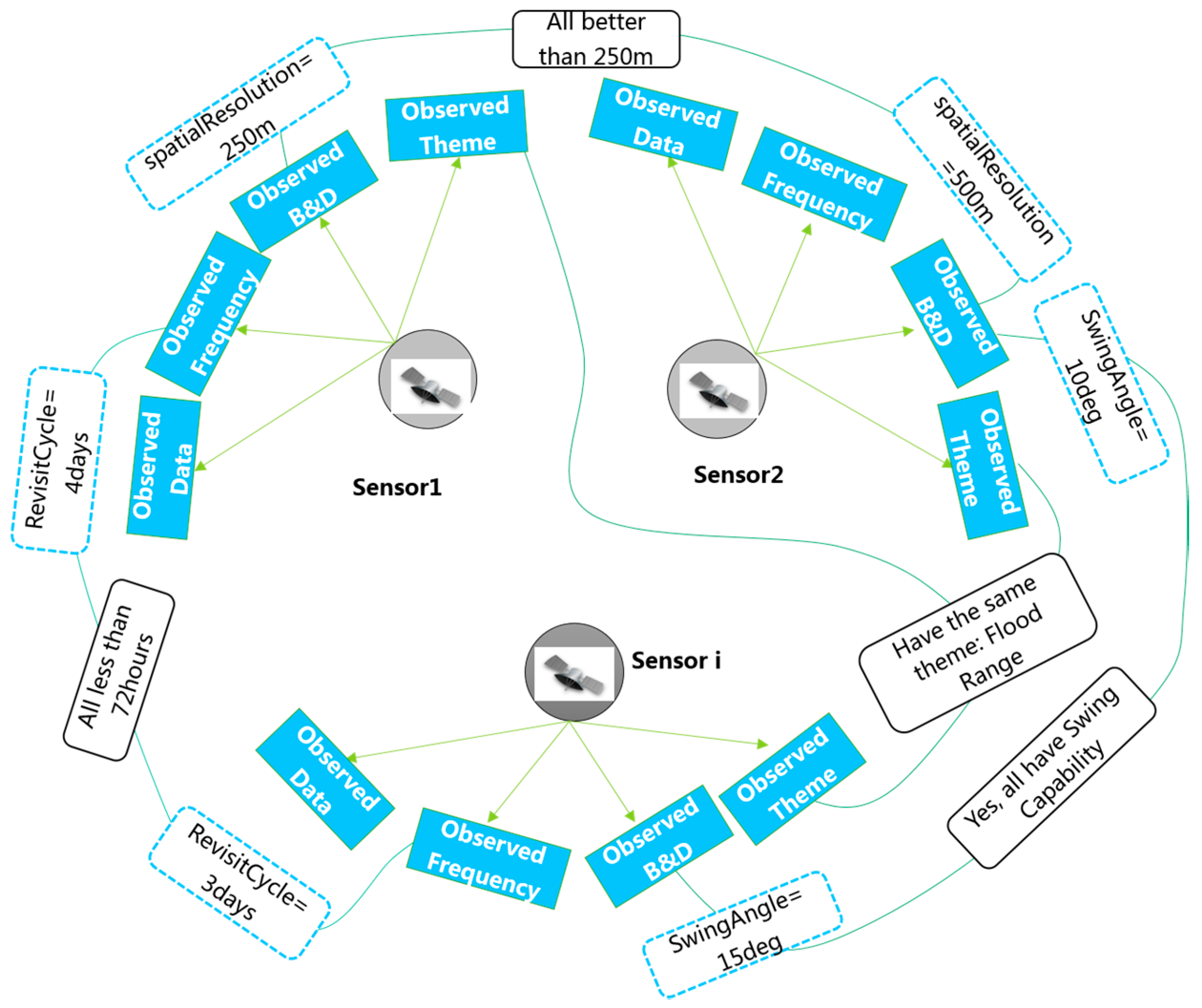
4.3. Flood Satellite Sensor Selection
5. Results and Discussion
5.1. Application Results of the SOCA Ontology
5.2. The Comparison between the Observation Capabilities in SOCA Ontology and the System Capabilities in the New SSN Ontology
5.3. Evaluation of SOCA Ontology Based on OntoQA Metrics
5.4. Comparison with Other Satellite Sensor Management Platforms for Sensor Selection
6. Conclusions and Outlook
Author Contributions
Funding
Conflicts of Interest
Abbreviations
| A3ME | Agent-based Middleware Approach for Mixed Mode Environments |
| CEOS | Committee on Earth Observation Satellites |
| CESN | Coast Environment Sensor Network |
| CRESDA | China Centre for Resources Satellite Data and Application |
| CSIRO | Commonwealth Scientific and Industrial Research Organization |
| CSW | Catalogue Service for the Web |
| CWRC | Changjiang Water Resources Commission |
| DynamicOC | Dynamic Observation Capability |
| EO | Earth Observation |
| MMI | Marine Metadata Interoperability |
| IoT.est | Environment for Service Creation and Testing in the Internet of Things |
| OGC | Open Geospatial Consortium |
| O&M | Observations and Measurements |
| OSCART | Observing Systems Capability Analysis and Review Tool |
| RDF | Resource Description Framework |
| SANY | Sensors Anywhere |
| SCO | Semantic Component Ontology |
| SECURE | Semantics Empowered Rescue Environment |
| SemSorGrid4Env | Semantic Sensor Grids for Environmental Application |
| SensorML | Sensor Model Language |
| SIR | Sensor Instance Registry |
| SOCA | Sensor Observation Capability Association |
| SOSA | Sensor, Observation, Sample, and Actuator |
| SSN | Semantic Sensor Network |
| SSO | Stimulus-Sensor-Observation |
| StarFL | Starfish Fungus Language |
| StaticOC | Static Observation Capability |
| TSOC | Task-Sensor-Observation Capability |
| SWAMO | Sensor Web for Autonomous Mission Operations |
| SWE | Sensor Web Enablement |
| SWROAO | Sensor Web Resource Ontology for Atmospheric Observation |
| WMO | World Meteorological Organization |
| WWW | World Wide Web |
References
- UCS Satellite Database in 2017. Available online: https://www.ucsusa.org/nuclear-weapons/space-weapons/satellite-database#.WnE-j3mQyYp (accessed on 31 January 2018).
- Di, L.; Wang, M.; Shen, X.; Dong, Z. From Earth Observation Satellite to Earth Observation Brain. Geomat. Inf. Sci. Wuhan Univ. 2017, 42, 143–149. [Google Scholar]
- Huang, C.Y.; Liang, S. The Open Geospatial Consortium Sensor Web Pivot Viewer: An innovative tool for worldwide sensor web resource discovery. Int. J. Dig. Earth 2014, 7, 761–769. [Google Scholar] [CrossRef]
- Hu, C.; Guan, Q.; Li, J.; Wang, K.; Chen, N. Representing Geospatial Environment Observation Capability Information: A Case Study of Managing Flood Monitoring Sensors in the Jinsha River Basin. Sensors 2016, 16, 2144. [Google Scholar] [CrossRef] [PubMed]
- Hu, C.; Guan, Q.; Chen, N.; Li, J.; Zhong, X.; Han, Y. An Observation Capability Metadata Model for EO Sensor Discovery in Sensor Web Enablement Environments. Remote Sens. 2014, 6, 10546–10570. [Google Scholar] [CrossRef]
- Semantic Sensor Network XG Final Report. Available online: http://www.w3.org/2005/Incubator/ssn/XGR-ssn-20110628/ (accessed on 10 August 2017).
- Bröring, A.; Echterhoff, J.; Jirka, S.; Simonis, I.; Everding, T.; Stasch, C.; Liang, S.; Lemmens, R. New generation sensor web enablement. Sensors 2011, 11, 2652–2699. [Google Scholar] [CrossRef] [PubMed]
- Nebert, D.; Whiteside, A.; Vretanos, P.A. OpenGIS Catalogue Services Specification; Implementation Specification 07-006r1; Open Geospatial Consortium Inc.: Wayland, MA, USA, 2007. [Google Scholar]
- Botts, M. OGC® SensorML: Model and XML Encoding Standard; Open Geospatial Consortium: Wayland, MA, USA, 2014. [Google Scholar]
- Bleier, T.; Bozic, B.; Bumerl-Lexa, R.; da Costa, A.; Costes, S.; Iosifescu, I.; Martin, O.; Frysinger, S.; Havlik, D.; Hilbring, D.; et al. (Eds.) SANY—An Open Service Architecture for Sensor Networks; SANY Consortium: Bath, UK, 2009. [Google Scholar]
- Kussul, N.; Mandl, D. Interoperable infrastructure for flood monitoring: Sensor Web, grid and cloud. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2012, 5, 1740–1745. [Google Scholar] [CrossRef] [Green Version]
- Mandl, D.; Cappelaere, P.; Frye, S.; Sohlberg, R.; Ong, L.; Chien, S.; Tran, D.; Davies, A.; Falke, S.; Kolitz, S.; et al. Sensor Web 2. In 0: Connecting Earth’s Sensors via the Internet. In Proceedings of the NASA Earth Science Technology Conference 2008, Adelphi, MD, USA, 20–24 June 2008; pp. 24–26. [Google Scholar]
- Jirka, S.; Nuest, D. OGC® Discussion Paper 10-171: Sensor Instance Registry; Open Geospatial Consortium: Wayland, MA, USA, 2010. [Google Scholar]
- Jirka, S.; Bröring, A. OGC® Discussion Paper 09-033: SensorML Profile for Discovery; Open Geospatial Consortium: Wayland, MA, USA, 2009. [Google Scholar]
- Stoimenov, L.; Bogdanovic, M.; Bogdanovic-Dinic, S. ESB-based sensor web integration for the prediction of electric power supply system vulnerability. Sensors 2013, 13, 10623–10658. [Google Scholar] [CrossRef] [PubMed]
- Jerome, G.; Frédéric, H.; Andrew, W.; Steven, S. OGC® Document (10-157r4): Earth Observation Metadata Profile of Observations & Measurements; Open Geospatial Consortium: Wayland, MA, USA, 2016. [Google Scholar]
- Fan, H.; Li, J.; Chen, N.; Hu, C. Capability representation model for heterogeneous remote sensing sensors: Case study on soil moisture monitoring. Environ. Model. Softw. 2015, 70, 65–79. [Google Scholar] [CrossRef]
- Janowicz, K.; Compton, M. The Stimulus-Sensor-Observation Ontology Design Pattern and its Integration into the Semantic Sensor Network Ontology. In Proceedings of the 3rd International Workshop on Semantic Sensor Networks 2010, SSN10; 9th International Semantic Web Conference, ISWC 2010, Shanghai, China, 7–11 November 2010; Taylor, K., Ayyagari, A., Roure, D.D., Eds.; CEUR: Shanghai, China, 2010; Volume 668. [Google Scholar]
- Keßler, C.; Janowicz, K. Linking Sensor Data–Why, to What, and How? In Proceedings of the International Workshop on Semantic Sensor Networks at the 9th International Semantic Web Conference (ISWC), Shanghai, China, 7–11 November 2010; pp. 48–63. [Google Scholar]
- Sheth, A.; Henson, C. Semantic Sensor Web. IEEE Internet Comput. 2008, 12, 78–83. [Google Scholar] [CrossRef]
- Barnaghi, P.; Presser, M.; Moessner, K. Publishing Linked Sensor Data. In Proceedings of the 3rd International Workshop on Semantic Sensor Networks, SSN10, Shanghai, China, 7–11 November 2010; pp. 1–6. [Google Scholar]
- Compton, M.; Barnaghi, P.; Bermudez, L.; Bermudez, L.; Garcia-Castro, R.; Corcho, O.; Cox, S.; Graybeal, J.; Hauswirth, M.; Henson, C.; et al. The SSN ontology of the W3C semantic sensor network incubator group. J. Web Semant. 2012, 17, 25–32. [Google Scholar] [CrossRef] [Green Version]
- Patni, H.; Henson, C.; Sheth, A.P. Linked Sensor Data. In Proceedings of the International Symposium on Collaborative Technologies and Systems, CTS 2010, Chicago, IL, USA, 17–21 May 2010; pp. 362–370. [Google Scholar]
- Pschorr, J.; Henson, C.; Patni, H.; Sheth, A. Sensor Discovery on Linked Data. In Proceedings of the 7th Extended Semantic Web Conference, ESWC2010, Heraklion, Greece, 30 May–2 June 2010. [Google Scholar]
- Kyzirakos, K.; Karpathiotakis, M.; Garbis, G.; Nikolaou, C.; Bereta, K.; Papoutsis, I.; Herekakis, T.; Michail, D.; Koubarakis, M.; et al. Wildfire monitoring using satellite images, ontologies and linked geospatial data. Web Semant. Sci. Serv. Agents World Wide Web 2014, 24, 18–26. [Google Scholar] [CrossRef]
- Koubarakis, M.; Sioutis, M.; Garbis, G.; Karpathiotakis, M.; Kyzirakos, K.; Nikolaou, C.; Bereta, K.; Vassos, S.; Dumitru, C.O.; Espinoza-Molina, D.; et al. Building virtual earth observatories using ontologies, linked geospatial data and knowledge discovery algorithms. In Proceedings of the OTM Confederated International Conferences “On the Move to Meaningful Internet Systems”, Rome, Italy, 10–14 September 2012; pp. 932–949. [Google Scholar]
- Roda, F.; Musulin, E. An ontology-based framework to support intelligent data analysis of sensor measurements. Expert Syst. Appl. 2014, 41, 7914–7926. [Google Scholar] [CrossRef]
- Compton, M.; Henson, C.; Neuhaus, H.; Lefort, L.; Sheth, A. A Survey of the Semantic Specification of Sensors. In Proceedings of the 2nd International Workshop on Semantic Sensor Networks, SSN09, Washington, DC, USA, 25–29 October 2009; Volume 522, pp. 17–32. [Google Scholar]
- Wang, X.; Zhang, X.; Li, M. A survey on semantic sensor web: Sensor ontology, mapping and query. Int. J. u- e-Serv. Sci. Technol. 2015, 8, 325–342. [Google Scholar]
- Corke, P.; Dunbabin, M.; Wark, T.; Sikka, P.; Hu, W.; Abbot, D. Csiro Sensor and Sensor Networks Research Progress Report July 2006 to June 2007; Medpagetoday Com: New York, NY, USA, 2007. [Google Scholar]
- CESN Sensor Ontology. Available online: http://www.cesn.umb.edu/sensor/cesn.owl (accessed on 10 August 2017).
- Herzog, A.; Jacobi, D.; Buchmann, A. A3ME—An Agent-Based Middleware Approach for Mixed Mode Environments. In Proceedings of the Second International Conference on Mobile Ubiquitous Computing, Systems, Services and Technologies (UBICOMM 2008), Valencia, Spain, 29 September–4 October 2008. [Google Scholar]
- Witt, K.J.; Stanley, J.; Smithbauer, D.; Mandl, D.; Ly, V.; Underbrink, A.; Metheny, M. Enabling Sensor Webs by utilizing SWAMO for autonomous operations. In Proceedings of the 8th NASA Earth Science Technology Conference, Baltimore, MD, USA, 24–26 June 2008. [Google Scholar]
- Rueda, C.; Galbraith, N.; Morris, R.A.; Bermudez, L.E.; Graybeal, J.; Arko, R.A. The MMI device ontology: Enabling sensor integration. In Proceedings of the AGU Fall Meeting Abstracts, San Francisco, CA, USA, 13–17 December 2010; p. 8. [Google Scholar]
- Russomanno, D.; Kothari, C.; Thomas, O. Building a Sensor Ontology: A Practical Approach Leveraging ISO and OGC Models. In Proceedings of the 2005 International Conference on Artificial Intelligence, IC-AI 2005, Las Vegas, NV, USA, 27–30 June 2005; CSREA Press: Las Vegas, NV, USA, 2005; pp. 637–643. [Google Scholar]
- Stasch, C.; Janowicz, K.; Bröring, A.; Reis, I.; Kuhn, W. A Stimulus-Centric Algebraic Approach to Sensors and Observations. Lect. Notes Comput. Sci. 2009, 5659, 169–179. [Google Scholar]
- SSN XG Results and Archives. Available online: https://www.w3.org/2005/Incubator/ssn/wiki/Main_Page (accessed on 10 February 2018).
- SSN Application. Available online: https://www.w3.org/community/ssn-cg/wiki/SSN_Applications (accessed on 10 February 2018).
- Barnaghi, P.; Wang, W.; Henson, C.; Taylor, K. Semantics for the internet of things: Early progress and back to the future. Int. J. Semant. Web Inf. Syst. 2012, 8, 1–21. [Google Scholar] [CrossRef]
- Henson, C.; Sheth, A.; Thirunarayan, K. Semantic perception: Converting sensory observations to abstractions. IEEE Internet Comput. 2012, 16, 26–34. [Google Scholar] [CrossRef]
- Desai, P.; Henson, C.; Anatharam, P.; Sheth, A. SECURE: Semantics Empowered resCUe Environment. In Proceedings of the 4th International Workshop on Semantic Sensor Networks, SSN2011, Bonn, Germany, 23–27 October 2011; Volume 839, pp. 110–113. [Google Scholar]
- Malewski, C.; Simonis, I.; Terhorst, A.; Bröring, A. Starfl–a modularised metadata language for sensor descriptions. Int. J. Dig. Earth 2014, 7, 450–469. [Google Scholar] [CrossRef]
- Gray, A.J.G.; Galpin, I.; Fernandes, A.A.A.; Paton, N.W.; Page, K.; Sadler, J. Semsorgrid4env architecture. Econ. Benefits 2010, 124, 22–29. [Google Scholar]
- Wang, C.; Chen, N.; Hu, C.; Yan, S.; Wang, W. A general Sensor Web Resource Ontology for atmospheric observation. In Proceedings of the IEEE International Geoscience and Remote Sensing Symposium (IGARSS), Vancouver, BC, Canada, 23–28 July 2011; pp. 3436–3439. [Google Scholar]
- Shi, Y.; Li, G.; Zhou, X.; Zhang, X. Sensor Ontology Building in Semantic Sensor Web. In Internet of Things; Wang, Y., Zhang, X., Eds.; Springer: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- New SSN. Available online: https://www.w3.org/TR/vocab-ssn/ (accessed on 5 May2018).
- Cox, S. OGC Abstract Specification (10-004r3): Geographic Information—Observations and Measurements; Open Geospatial Consortium: Wayland, MA, USA, 2013. [Google Scholar]
- Uschold, M.; Gruninger, M.; Gruninger, M. Ontologies: Principles, Methods and Applications. Knowl. Eng. Rev. 1996, 11, 93–136. [Google Scholar] [CrossRef]
- Borgo, S.; Masolo, C. Foundational choices in dolce. In Handbook on Ontologies; Staab, S., Studer, R., Eds.; Springer-Verlag: Berlin, Germany, 2009; Volume 2, pp. 361–382. [Google Scholar]
- SSN. Available online: https://www.w3.org/2005/Incubator/ssn/wiki/DUL_ssn (accessed on 10 August 2017).
- Nine-Intersection Model. Available online: https://en.wikipedia.org/wiki/DE-9IM (accessed on 10 February 2018).
- Herring, J. OpenGIS® Implementation Standard (OGC 06-103r4): Geographic Information-Simple Feature Access-Part 1: Common Architecture; Open Geospatial Consortium: Wayland, MA, USA, 2011. [Google Scholar]
- Time Ontology in OWL. Available online: https://www.w3.org/TR/owl-time/#classes (accessed on 5 May 2018).
- ebXML Registry Information Model Version 3.0. Available online: http://docs.oasis-open.org/regrep/v3.0/specs/regrep-rim-3.0-os.pdf (accessed on 10 August 2017).
- Chen, N.; Wang, X.; Yang, X. A direct registry service method for sensors and algorithms based on the process model. Comput. Geosci. 2013, 56, 45–55. [Google Scholar] [CrossRef]
- Xiao, C.; Chen, N.; Wang, X.; Chen, Z. A Semantic Registry Method Using Sensor Metadata Ontology to Manage Heterogeneous Sensor Information in the Geospatial Sensor Web. ISPRS Int. J. Geo-Inf. 2016, 5, 63. [Google Scholar] [CrossRef]
- García, J.; García-Peñalvo, F.J.; Therón, R. A Survey on Ontology Metrics. In Knowledge Management, Information Systems, E-Learning, and Sustainability Research, WSKS 2010; Communications in Computer and Information, Science; Lytras, M.D., Ordonez De Pablos, P., Ziderman, A., Roulstone, A., Maurer, H., Imber, J.B., Eds.; Springer: Berlin/Heidelberg, Germany, 2010; Volume 111. [Google Scholar]
- Tartir, S.; Arpinar, I.B.; Moore, M.; Sheth, A.P.; Aleman-Meza, B. OntoQA: Metric-Based Ontology Quality Analysis. In Proceedings of the IEEE ICDM 2005 Workshop on Knowledge Acquisition from Distributed, Autonomous, Semantically Heterogeneous Data and Knowledge Sources, Houston, TX, USA, 27 November 2005. [Google Scholar]
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Features | Date | Target Object | Design Pattern | Application Usage | Supported Ontology Description | Supporting Multi-Sensor Association | Fine-Grained Observation Capability Description | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Sensor Ontologies | Measurement Capability | Category-Observation Capability | Count-Observation Capability | Truth-Observation Capability | Temporal-Observation Capability | Geometry-Observation Capability | Complex-Observation Capability | |||||||
| OntoSensor | 2006 | Generic sensor | N/A | Knowledge base and inference | Sensor physical property and observations | × | × | × | × | × | × | × | × | |
| CESN | 2008 | Coastal Environmental Sensing Networks | N/A | Inferring domain knowledge from coastal data | Sensor types and deployments | × | × | × | × | × | × | × | × | |
| A3ME | 2008 | Low-power devices | N/A | Devices and capabilities classification | Devices and their capability | × | ○ | × | × | × | × | × | × | |
| SWAMO | 2008 | Intelligent software agents | N/A | Intelligent agents | physical equipment, the process model and tasks | × | × | × | × | × | × | × | × | |
| CSIRO Sensor | 2009 | Generic sensor | N/A | Data integration, search, classification and workflows | Sensors and deployments | × | × | × | × | × | × | × | × | |
| MMI | 2009 | Marine equipment | N/A | Marine equipment interoperability | Oceanographic devices, sensors and samplers | × | × | × | × | × | × | × | × | |
| SSN | 2011 | Generic sensor | SSO | Semantic interoperability | Properties, measurement capabilities and observations | × | √ | × | × | × | × | × | × | |
| SemSorGrid4ENV | 2011 | environment monitoring system | N/a | semantic-based sensor network applications for environmental management | Common observation data model | × | × | × | × | × | × | × | × | |
| SECURE | 2011 | environment sensors | SSO | Data from Environmental observation | × | × | × | × | × | × | × | × | ||
| SWROAO | 2011 | aircraft, ground and spacecraft sensors | N/A | Atmospheric monitoring | Satellite orbit, remote sensing and ground observation platform | × | × | × | × | × | ○ | ○ | × | |
| SCO | 2012 | Generic sensor | SSO | Weather monitoring | Component, the Service and the Context module | × | ○ | × | × | × | ○ | ○ | × | |
| IoT.est | 2012 | IoT sensors | SSO | IoT observation management | Resources, observations and measurement systems | × | ○ | × | × | × | × | × | × | |
| Semantic Perception | 2012 | Environment monitoring machines | SSO | Environment perception | Observation and environmental knowledge | × | × | × | × | × | × | × | × | |
| StarFL | 2014 | Generic sensor | N/A | Sensor discovery | Measurement capability | × | ○ | × | × | × | × | × | × | |
| New SSN | 2017 | Generic sensor | SOSA | Broadening the Sensor application | Sensor, observation, sampler and actuator | × | √ | × | × | × | × | × | × | |
| Ontologies | System Capabilities in SSN | Observation Capabilities in SOCA | |
|---|---|---|---|
| Features | |||
| Measurement | ssn:accuracy, ssn:drift ssn:resolution ssn:responseTime ssn:selectiveity ssn:frequency, ssn:measurementRange ssn:precision ssn:actuationRange ssn:latency ssn:repeatability | oca:FOV, oca:SwathRange, oca:GroundResolution, oca:BandWidth, oca:BandsWidthRange, oca:PolarizationFrequency, oca:RangeResolution, oca:NadirResolution, oca:RadiationResolution, oca:GeolocationAccuracy, oca:AngleAccuracy, oca:DistanceAccuracy, oca:RadiometricAccuracy, oca:AzimuthResolution, oca:IFOV, oca:SwingAngle, oca:RevisitCycle | |
| Category-Observation | - | oca:BandsCategory, oca:BeamMode, oca:BandType, oca:PolarizationBand, oca:ObservedParameter, oca:PotentialApplication, oca:ThemeType | |
| Count-Observation | - | oca:BandsNumber | |
| Truth-Observation | - | oca:IsSwing | |
| Temporal-Observation | - | time:Equals, time:Finishes, time:During, time:Starts, time:Overlaps, time:Meets and time:Before | |
| Geometry-Observation | - | oca:SpaceEquals, oca:SpaceDisjoint, oca:SpaceIntersects, oca:SpaceTouches, oca:SpaceCrosses, oca:SpaceOverlaps, oca:SpaceWithin and oca:SpaceContains | |
| Complex-Observation | - | oca:OpticalSpectralFeature, oca:RadarSpectralFeature, oca:RSImageDataoca:SpaceCorrelation, oca:TimeCorrelation | |
| Evaluation Metrics and Their Precise Definition | Evaluation Process and Result | Evaluation Description |
|---|---|---|
| Property Richness (PR) Reflecting that more properties are defined, the more knowledge the ontology conveys. | PR = P/C = 81/75 = 1.08 | Every class contains 1.08 properties, which means our ontology can convey a lot of domain knowledge to a certain extent (PR = 1.08). |
| Inheritance Richness (IR) Distinguishing a horizontal ontology from a vertical ontology or an ontology with different levels of specialization. A high IR means that ontology represents a wide range of general knowledge. | IR = SC/C = 37/75 = 0.49 | It means that the horizontal ontology represents the knowledge in detail relatively. |
| Relationship Richness (RR) Reflecting the diversity of relations and placement of relations in the ontology. RR close to zero would indicate that most of the relationships are class-subclass relationships. RR close to one would indicate that most of the relationships are other than class-subclass. | RR = OP/(SC+OP) = 41/(37 + 41) = 0.53 | The richness of ontology relationships is 0.53, which means our ontology has the characteristics of a diversity of relations. |
| Average Population (AP) An indication of the number of instances compared to the number of classes. A high AP means that the instances extracted into the knowledgebase might be sufficient to represent all of the knowledge. | AP = I/C = 200/75 = 2.67 | This means that the implementation of instantiation is relative sufficient in the process of forming knowledge base. |
| Readability (Rd) Indicating the existence of human readable descriptions in the ontology, such as comments and labels. A higher Rd, the more the availability of human-readable information. | Rd = Number of rdfs: comment + Number off rdfs: label = 166 + 166 = 332 | This metric can be a good indication for users to query, understand and share the ontology. |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Hu, C.; Li, J.; Lin, X.; Chen, N.; Yang, C. An Observation Capability Semantic-Associated Approach to the Selection of Remote Sensing Satellite Sensors: A Case Study of Flood Observations in the Jinsha River Basin. Sensors 2018, 18, 1649. https://doi.org/10.3390/s18051649
Hu C, Li J, Lin X, Chen N, Yang C. An Observation Capability Semantic-Associated Approach to the Selection of Remote Sensing Satellite Sensors: A Case Study of Flood Observations in the Jinsha River Basin. Sensors. 2018; 18(5):1649. https://doi.org/10.3390/s18051649
Chicago/Turabian StyleHu, Chuli, Jie Li, Xin Lin, Nengcheng Chen, and Chao Yang. 2018. "An Observation Capability Semantic-Associated Approach to the Selection of Remote Sensing Satellite Sensors: A Case Study of Flood Observations in the Jinsha River Basin" Sensors 18, no. 5: 1649. https://doi.org/10.3390/s18051649