A Polygon Model for Wireless Sensor Network Deployment with Directional Sensing Areas

Abstract
:1. Introduction
2. Related Work
3. The Polygon Model
3.1. The Definitions of the Polygon Model
Definition 1 (polygon model)
Definition 2
Definition 3
3.2. Calculation of the Communication/Sensing Range
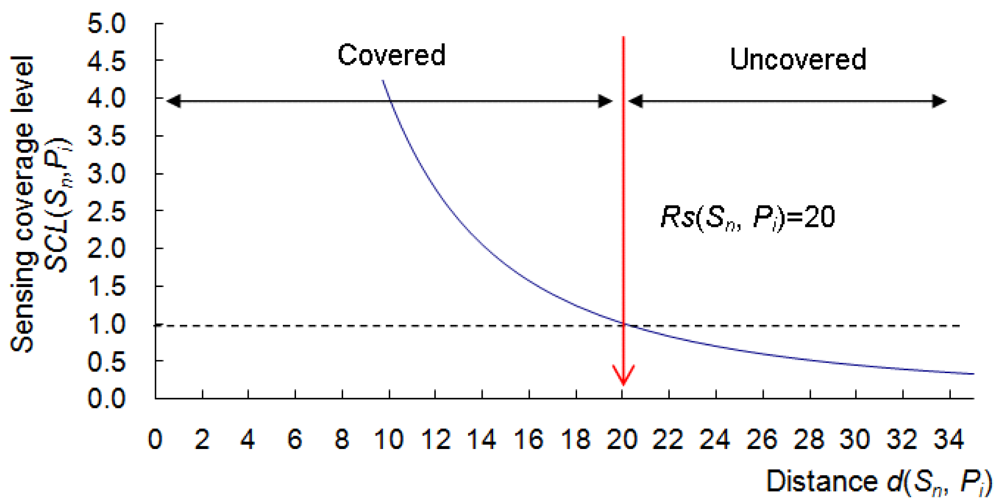
3.3. The Communication/Sensing Coverage Level
3.4. Network Connectivity and Sensing Coverage Rate
Definition 4
Definition 5 (network connectivity)
Definition 6
Definition 7
Definition 8 (sensing coverage rate of a field)
Definition 9 (sensing coverage rate of a square area centered at grid point Pi)
4. A Randomized WSN Deployment Algorithm for the Polygon Model
- Initialization: In this step, the deployment parameters, a deployment area with or without obstacles, and a sink node (used for collecting sensing data) are initialized by reading a configuration file;
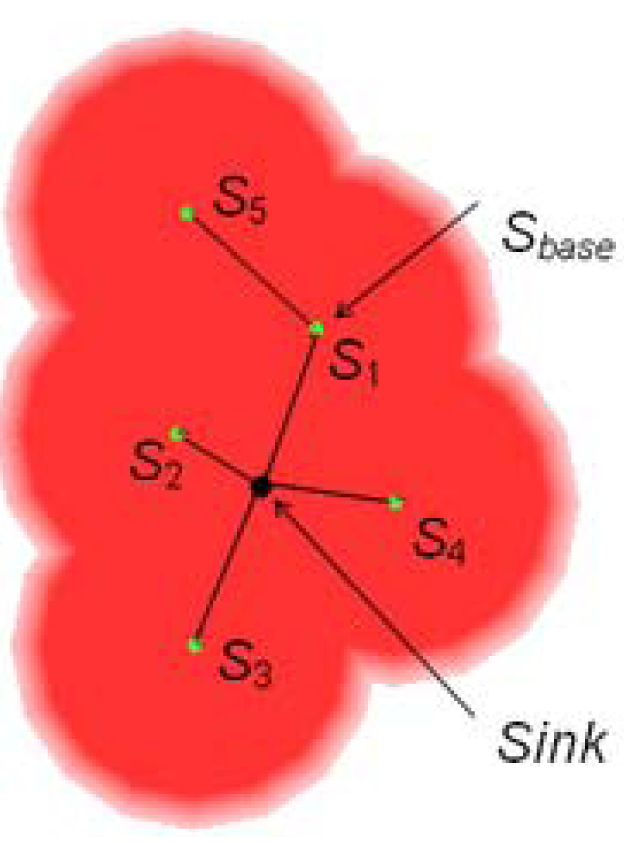
- Base node selection: In this step, a base node is selected for deploying new sensor nodes around it;
- Candidate positions generation: In this step, some candidate positions for new sensor nodes are generated under the topology control mechanism to maintain the network connectivity;
- Scoring and deployment: In this step, a new sensor node is deployed to a candidate position via the scoring process.
4.1. Step 1: Initialization
- The length and the width of the deployment area;
- Information of the sink node, such as the location, the rotation angle, and its communication area approximated by the polygon model;
- Information of the obstacles (optional), where each obstacle is a polygon represented by a list of the vertices.
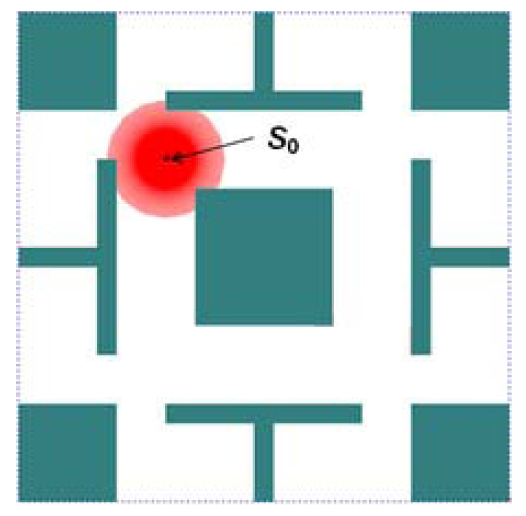
4.2. Step 2: Base Node Selection
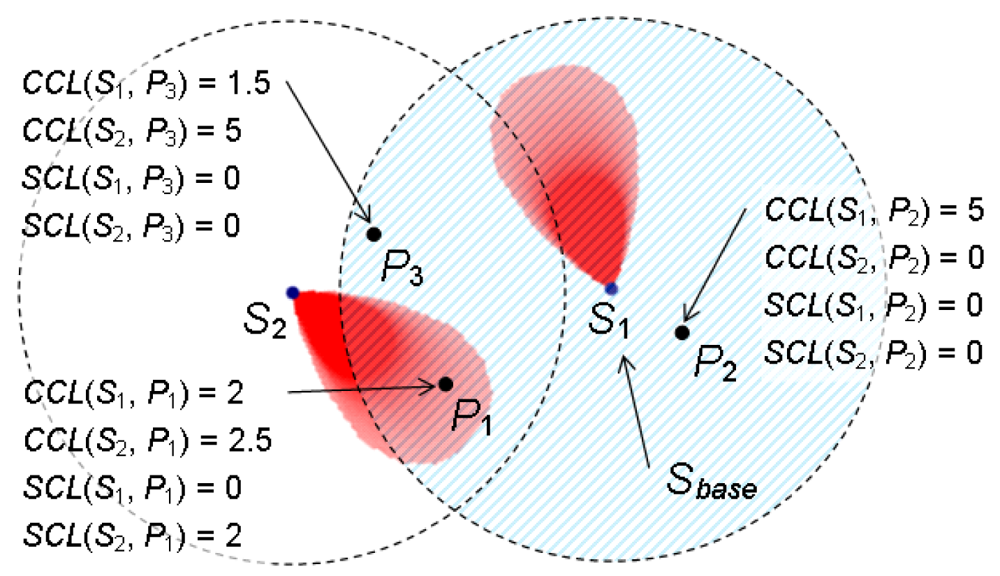
4.3. Step 3: Candidate Positions Generation and Topology Control Mechanism
Case 1 (Rc ≥ Rs)
Case 2 (Rc < Rs)
4.4. Step 4: Scoring and Deployment
Case 1 (without rotation)
Case 2 (with rotation)
| Algorithm Deploy-Random(num_deployable, limit_candidate, Max_CCL, sen_covrate, num_deployed) | |
| /* | Step 1: Initialization */ |
| 1. | Initialize deployment area; |
| 2. | Add sink node to Nodedeployed and Nodebase; |
| 3. | Calculate Max_SCL based on Max_CCL and type of sensor; |
| 4. | while (Nodebase is not empty){ |
| /* Step 2: Base node selection */ | |
| 5. | Select a Sbase from Nodebase; |
| 6. | base_deployable = true; |
| 7. | while (base_deployable is true){ |
| /* Step 3: Candidate positions generation */ | |
| 8. | Clear Candidate and set num_candidate = 0; |
| 9. | while (num_candidate < limit_candidate){ |
| 10. | Generates a position Pi randomly within AreaC(Sbase); |
| 11. | if (Pi is eligible under the topology control mechanism with Max_CCL and Max_SCL){ |
| 12. | Add Pi to Candidate; |
| 13. | num_candidate++; |
| 14. | } |
| 15. | } |
| 16. | if(num_candidate == 0)base_deployable = false;/* select a new Sbase */ |
| 17. | else{/* Step 4: Scoring and deployment */ |
| 18. | Generate a new sensor node Snew; |
| 19. | for (all Pi in Candidate)Call Score(Pi) and save score to CandidateScore[Pi]; |
| 20. | Deploy Snew to Pi that has the highest score in CandidateScore; |
| 21. | Add Snew to Nodedeployed and Nodebase; |
| 22. | num_deployable--; |
| 23. | if (num_deployable == 0)break; |
| 24. | } |
| 25. | } |
| 26. | Remove Sbase from Nodebase;/* restart from Step 2 */ |
| 27. | } |
| 28. | return sen_covrate and num_deployed; |
| End_of_Deploy-Random | |
4.5. Find the Maximum Sensing Coverage Rate
| Algorithm Find-Max-Sen-Covrate(num_deployable, limit_candidate, min_CCL_diff) | |
| /* | Initialization */ |
| 1. | LB_CCL = (Rc/dmax)2;/* dmax is the maximum distance between sensor nodes */ |
| 2. | UB_CCL = (Rc/dmin)2;/* dmin is the minimum distance between sensor nodes */ |
| /* | Test with lower bound */ |
| 3. | Deploy-Random(num_deployable, limit_candidate, LB_CCL, LB_sen_covrate, LB_num_deployed); |
| 4. | if (LB_sen_covrate = 1 ‖ LB_num_deployed = num_deployable) return LB_sen_covrate; |
| /* | Test with upper bound */ |
| 5. | Deploy-Random(num_deployable, limit_candidate, UB_CCL, UB_sen_covrate, UB_num_deployed); |
| 6. | if (UB_sen_covrate < 1 && UB_num_deployed < num_deployable) return UB_sen_covrate; |
| /* | Test with medium */ |
| 7. | if ((UB_CCL − LB_CCL) < min_CCL_diff) return Max(UB_sen_covrate, LB_sen_covrate); |
| 8. | MB_CCL = (LB_CCL+UB_CCL)/2; |
| 9. | Deploy-Random(num_deployable, limit_candidate, MB_CCL, MB_sen_covrate, MB_num_deployed); |
| 10. | if (MB_sen_covrate < 1 && MB_num_deployed < num_deployable) |
| { LB_CCL = MB_CCL, LB_sen_covrate = MB_sen_covrate, | |
| LB_num_deployed = MB_num_deployed } | |
| 11. | else { UB_CCL = MB_CCL, UB_sen_covrate = MB_sen_covrate, |
| UB_num_deployed = MB_num_deployed } | |
| 12. | Go to line 7; |
| End_of_Find-Max-Sen-Covrate | |
5. Deployment Simulation
5.1. Simulation 1: Compare with the Disk Model and the Circular Sector Model
- Type 1: omnidirectional antenna + omnidirectional sensor, and
- Type 2: omnidirectional antenna + directional sensor.
5.1.1. Case 1: Rc/Rs = 2
Remark 1
Remark 2
5.1.2. Case 2: Rc/Rs = 1.2
5.1.3. Case 3: Rc/Rs = 1/1.2
5.2. Simulation 2: the Polygon Model with Different Rotation Steps
Remark 3
5.3. Simulation 3: the Polygon Model with Different Number of Vertices
Remark 4
Remark 5
Remark 6
Remark 7
6. Conclusions
Acknowledgments
References and Notes
- Chintalapudi, K.; Paek, J.; Gnawali, O.; Fu, T.S.; Dantu, K.; Caffrey, J.; Govindan, R.; Johnson, E.; Masri, S. Structural damage detection and localization using NETSHM. Proceedings of the 5th International Conference on Information Processing in Sensor Networks (IPSN'06), Nashville, TN, USA, April 19–21, 2006; pp. 475–482.
- Kim, S.; Pakzad, S.; Culler, D.; Demmel, J.; Fenves, G.; Glaser, S.; Turon, M. Health monitoring of civil infrastructures using wireless sensor networks. Proceedings of the 6th International Conference on Information Processing in Sensor Networks (IPSN'07), Cambridge, MA, USA, April 25–27, 2007; pp. 254–263.
- Li, M.; Liu, Y. Underground structure monitoring with wireless sensor networks. Proceedings of the 6th International Conference on Information Processing in Sensor Networks (IPSN'07), Cambridge, MA, USA, April 25–27, 2007; pp. 69–78.
- Johnstone, I.; Nicholson, J.; Shehzad, B.; Slipp, J. Experiences from a wireless sensor network deployment in a petroleum environment. Proceedings of the International Wireless Communications and Mobile Computing Conference 2007 (IWCMC'07), Honolulu, HI, USA, August 12–16, 2007; pp. 382–387.
- Krishnamurthy, L.; Adler, R.; Buonadonna, P.; Chhabra, J.; Flanigan, M.; Kushalnagar, N.; Nachman, L.; Yarvis, M. Design and deployment of industrial sensor networks: experiences from a semiconductor plant and the north sea. Proceedings of the 3rd ACM Conference on Embedded Networked Sensor Systems (SenSys'05), San Diego, CA, USA, November 2–4, 2005; pp. 64–75.
- Werner-Allen, G.; Lorincz, K.; Ruiz, M.; Marcillo, O.; Johnson, J.; Lees, J.; Welsh, M. Deploying a wireless sensor network on an active volcano. IEEE Internet Comput. 2006, 10, 18–25. [Google Scholar]
- Vasilescu, I.; Detweiler, C.; Rus, D. AquaNodes: an underwater sensor network. Proceedings of the Second ACM International Workshop on UnderWater Networks (WUWNet'07), Montreal, Quebec, Canada, September 14, 2007; pp. 85–88.
- Szewczyk, R.; Osterweil, E.; Polastre, J.; Hamilton, M.; Mainwaring, A.; Estrin, D. Habitat monitoring with sensor networks. Commun. ACM 2004, 47, 34–40. [Google Scholar]
- Li, X.Y.; Wan, P.J.; Frieder, O. Coverage in wireless ad hoc sensor networks. IEEE Trans. Comput. 2003, 52, 753–763. [Google Scholar]
- Kuhn, F.; Wattenhofer, R.; Zollinger, A. Ad hoc networks beyond unit disk graphs. Wirel. Netw. 2008, 14, 715–729. [Google Scholar]
- Lee, J.J.; Krishnamachari, B.; Kuo, C.C.J. Impact of heterogeneous deployment on lifetime sensing coverage in sensor networks. Proceedings of the First Annual IEEE Communications Society Conference on Sensor and Ad Hoc Communications and Networks (SECON'04), Santa Clara, CA, USA, October 4–7, 2004; pp. 367–376.
- Ai, J.; Abouzeid, A.A. Coverage by directional sensors in randomly deployed wireless sensor networks. J. Comb. Optim. 2006, 11, 21–41. [Google Scholar]
- Han, X.; Cao, X.; Lloyd, E.L.; Shen, C.C. Deploying Directional Sensor Networks with Guaranteed Connectivity and Coverage. Proceedings of the 5th Annual IEEE Communications Society Conference on Sensor, Mesh and Ad Hoc Communications and Networks (SECON'08), San Francisco, CA, USA, June 16–20, 2008; pp. 153–160.
- Bai, X.; Xuan, D.; Yun, Z.; Lai, T.H.; Jia, W. Complete optimal deployment patterns for full-coverage and k-connectivity (k ≤ 6) wireless sensor networks. Proceedings of the 9th ACM International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc'08), Hong Kong SAR, China, May 26–30, 2008; pp. 401–410.
- He, T.; Huang, C.; Blum, B.M.; Stankovic, J.A.; Abdelzaher, T.F. Range-free localization and its impact on large scale sensor networks. ACM Trans. Embedded Comput. Sys. 2005, 4, 877–906. [Google Scholar]
- Zhou, G.; He, T.; Krishnamurthy, S.; Stankovic, J.A. Models and solutions for radio irregularity in wireless sensor networks. ACM Trans. Sen. Netw. 2006, 2, 221–262. [Google Scholar]
- Bai, X.; Kumar, S.; Xuan, D.; Yun, Z.; Lai, T.H. Deploying wireless sensors to achieve both coverage and connectivity. Proceedings of the 7th ACM International Symposium on Mobile Ad Hoc Networking and Computing (MobiHoc'06), Florence, Italy, May 22–25, 2006; pp. 131–142.
- Wang, Y.C.; Hu, C.C.; Tseng, Y.C. Efficient Placement and Dispatch of Sensors in a Wireless Sensor Network. IEEE Trans. Mobile Comput. 2008, 7, 262–274. [Google Scholar]
- Xing, G.; Wang, X.; Zhang, Y.; Lu, C.; Pless, R.; Gill, C. Integrated coverage and connectivity configuration for energy conservation in sensor networks. ACM Trans. Sen. Netw. 2005, 1, 36–72. [Google Scholar]
- Li, N.; Hou, J.C. Localized topology control algorithms for heterogeneous wireless networks. IEEE/ACM Trans. Netw. 2005, 13, 1313–1324. [Google Scholar]
- Friis, H.T. A Note on a Simple Transmission Formula. Proceedings of the IRE, New York, NY, USA, May 1946; 34, pp. 254–256.













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Sn | Sensor node n |
| polyC(Sn) | The communication area of Sn under the polygon model |
| (Rci, θci) | The ith vertex of polyC(Sn) |
| polyS(Sn) | The sensing area of Sn under the polygon model |
| (Rsi, θsi) | The ith vertex of polyS(Sn) |
| Area | A field |
| AreaC(Sn) | The communication area covered by polyC(Sn) in a field |
| AreaS(Sn) | The sensing area covered by polyS(Sn) in a field |
| Loc(Sn) | The location of Sn in a field |
| Rot(Sn) | The rotation degree of Sn counterclockwise from 0° in a field |
| Pi | Point i of a field |
| Rc(Sn, Pi) | The communication range of Sn in the direction of Pi |
| Rs(Sn, Pi) | The sensing range of Sn in the direction of Pi |
| θ(Sn, Pi) | The angle between ray SnPi and the 0° ray originating at Sn |
| d(Sn, Pi) | The Euclidean distance between Sn and Pi |
| ΔPaPbPc | The area formed by points Pa, Pb, and Pc |
| CCL(Sn, Pi) | The communication coverage level of Sn at Pi |
| SCL(Sn, Pi) | The sensing coverage level of Sn at Pi |
| W | A wireless sensor network |
| CR(Area,W) | The sensing coverage rate of W on Area |
| Square(Pi) | A square area centered at Pi |
| CR(Square(Pi), W) | The sensing coverage rate of W on Square(Pi) |
| NC(W) | The network connectivity of W |
| Sbase | Base node |
| Max_CCL | The maximum threshold of the communication coverage level |
| Max_SCL | The maximum threshold of the sensing coverage level |
| Score(Pi) | The score of a candidate position Pi |
| Rotstep | The rotation steps of Sn |
| Rc | The maximum communication range of a sensor node |
| Rs | The maximum sensing range of a sensor node |
| dmax | The maximum distance between sensor nodes |
| Coverage area | Disk/Circular sector model | Polygon model |
|---|---|---|
 antenna antennaRc = 60 |  central angle= 360° central angle= 360°radius = 60 |  [(60, 0°), (60, 22.5°), (60, 45°), (60, 67.5°), (60, 90°), (60, 112.5°), (60, 135°), (60, 157.5°), (60, 180°), (60, 202.5°), (60, 225°), (60, 247.5°), (60, 270°), (60, 292.5°), (60, 315°), (60, 337.5°)] [(60, 0°), (60, 22.5°), (60, 45°), (60, 67.5°), (60, 90°), (60, 112.5°), (60, 135°), (60, 157.5°), (60, 180°), (60, 202.5°), (60, 225°), (60, 247.5°), (60, 270°), (60, 292.5°), (60, 315°), (60, 337.5°)] |
 sensor sensorRs = 30 (Case 1: Rc/Rs = 2) 50 (Case 2: Rc/Rs = 1.2) 72 (Case 3: Rc/Rs = 1/1.2) |  angle= 360° angle= 360°radius = 30 (Case 1)50 (Case 2), 72 (Case 3) |  [(Rs1, 0°), (Rs2, 22.5°), (Rs3, 45°), (Rs4, 67.5°), (Rs5, 90°), (Rs6, 112.5°), (Rs7, 135°), (Rs8, 157.5°), (Rs9, 180°), (Rs10, 202.5°), (Rs11, 225°), (Rs12, 247.5°), (Rs13, 270°), (Rs14, 292.5°), (Rs15, 315°), (Rs16, 337.5°)] Rsi = 30 (Case 1), 50 (Case 2), 72 (Case 3) [(Rs1, 0°), (Rs2, 22.5°), (Rs3, 45°), (Rs4, 67.5°), (Rs5, 90°), (Rs6, 112.5°), (Rs7, 135°), (Rs8, 157.5°), (Rs9, 180°), (Rs10, 202.5°), (Rs11, 225°), (Rs12, 247.5°), (Rs13, 270°), (Rs14, 292.5°), (Rs15, 315°), (Rs16, 337.5°)] Rsi = 30 (Case 1), 50 (Case 2), 72 (Case 3) |
| Coverage area | Disk model | Circular sector model | Polygon model |
|---|---|---|---|
 |  |  |  |
| Rs = 30 (Case 1: Rc/Rs = 2) 50 (Case 2: Rc/Rs = 1.2) 72 (Case 3: Rc/Rs = 1/1.2) | central angle = 360° radius = 30 (Case 1) 50 (Case 2) 72 (Case 3) | central angle = 53.2° radius = 30 (Case 1) 50 (Case 2) 72 (Case 3) | [(30, 4.9°), (26.5, 18.3°), (20.7, 26.6°), (6, 38.7°), (0, 180°),(6, 321.3°), (20.7, 333.4°), (26.5, 341.7°), (30, 355.1°)] (Case 1) [(50, 4.9°), (44.1, 18.3°), (34.6, 26.6°), (10, 38.7°), (0, 180°),(10, 321.3°), (34.6 333.4°), (44.1, 341.7°), (50, 355.1°)] (Case 2) [(72, 4.9°), (63.6, 18.3°), (49.68, 26.6°), (14.4, 38.7°), (0, 180°), (14.4, 321.3°), (49.68, 333.4°), (63.6, 341.7°), (72, 355.1°)] (Case 3) |
| Disk model | Circular sector model (rotation steps: 8) | Polygon model (rotation steps: 8) | ||||
|---|---|---|---|---|---|---|
| Deployment area without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Type 1 | 0.9752 | 105 | 1 (Max_CCL = 4.09375) | 224 | 1 (Max_CCL = 4.09375) | 229 |
| Type 2 | 0.1556 | 105 | 0.9298 (Max_CCL = 48.1797) | 992 | 0.9512 (Max_CCL = 40.832) | 1000 |
| Deployment area with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Type 1 | 0.9073 | 72 | 1 (Max_CCL = 4.09375) | 173 | 1 (Max_CCL = 4.09375) | 179 |
| Type 2 | 0.1411 | 72 | 0.9706 (Max_CCL = 100) | 920 | 0.9854 (Max_CCL = 100) | 930 |
| Disk model | Circular sector model (rotation steps: 8) | Polygon model (rotation steps: 8) | ||||
|---|---|---|---|---|---|---|
| Deployment area without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Type 1 | 0.9898 | 72 | 1 (Max_CCL = 1.38672) | 85 | 1 (Max_CCL = 1.38672) | 84 |
| Type 2 | 0.2948 | 72 | 0.9792(Max_CCL =100) | 573 | 0.9943(Max_CCL =100) | 563 |
| Deployment area with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Type 1 | 0.9732 | 48 | 1 (Max_CCL = 1.38672) | 72 | 1 (Max_CCL = 1.38672) | 72 |
| Type 2 | 0.2144 | 48 | 0.9874(Max_CCL = 100) | 444 | 0.9954(Max_CCL = 100) | 451 |
| Disk model | Circular sector model (rotation steps: 8) | Polygon model (rotation steps: 8) | ||||
|---|---|---|---|---|---|---|
| Deployment area without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Type 1 | 1 | 68 | 1 (Max_CCL = 1.38672) | 74 | 1 (Max_CCL = 1.38672) | 69 |
| Type 2 | 0.5434 | 68 | 0.9946 (Max_CCL = 100) | 391 | 1 (Max_CCL = 100) | 394 |
| Deployment area with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Type 1 | 0.9748 | 45 | 1 (Max_CCL = 1.38672) | 55 | 1 (Max_CCL = 1.38672) | 54 |
| Type 2 | 0.3953 | 45 | 0.9952 (Max_CCL = 100) | 305 | 0.9999 (Max_CCL =100) | 293 |
| Deployment area | Rotation steps: 1 | Rotation steps: 4 | Rotation steps: 8 | |||
|---|---|---|---|---|---|---|
| without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.9258 (Max_CCL =24.2031) | 992 | 0.9344 (Max_CCL =41.2188) | 997 | 0.9512 (Max_CCL = 40.832) | 1000 |
| Case 2: Rc/Rs = 1.2 | 0.9634 (Max_CCL =35.0312) | 993 | 0.9880 (Max_CCL =100) | 720 | 0.9943 (Max_CCL =100) | 563 |
| Case 3: Rc/Rs = 1/1.2 | 0.988209 (Max_CCL =42.3789) | 1000 | 1 (Max_CCL =95.3594) | 524 | 1 (Max_CCL = 100) | 394 |
| with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.923019 (Max_CCL =50.8867) | 988 | 0.969716 (Max_CCL =100) | 963 | 0.9854 (Max_CCL = 100) | 930 |
| Case 2: Rc/Rs = 1.2 | 0.95657 (Max_CCL =96.9062) | 999 | 0.987844 (Max_CCL =100) | 536 | 0.9954 (Max_CCL =100) | 451 |
| Case 3: Rc/Rs = 1/1.2 | 0.97462 (Max_CCL =100) | 801 | 0.999915 (Max_CCL =100) | 387 | 0.9999 (Max_CCL =100) | 293 |
| Rotation steps: 16 | Rotation steps: 32 | Rotation steps: 64 | ||||
| without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.958755 (Max_CCL = 41.9922) | 990 | 0.960028 (Max_CCL = 41.6055) | 1000 | 0.965105 (Max_CCL =38.8984) | 1000 |
| Case 2: Rc/Rs = 1.2 | 0.9959 (Max_CCL = 100) | 537 | 0.9960 (Max_CCL = 100) | 536 | 0.9971 (Max_CCL = 100) | 537 |
| Case 3: Rc/Rs = 1/1.2 | 1 (Max_CCL =85.6914) | 369 | 0.999996 (Max_CCL =100) | 396 | 0.999992 (Max_CCL =100) | 390 |
| with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.991359 (Max_CCL = 100) | 921 | 0.990761 (Max_CCL = 100) | 912 | 0.991908 (Max_CCL = 100) | 926 |
| Case 2: Rc/Rs = 1.2 | 0.997216 (Max_CCL = 100) | 440 | 0.997367 (Max_CCL = 100) | 415 | 0.996999 (Max_CCL = 100) | 414 |
| Case 3: Rc/Rs = 1/1.2 | 0.999994 (Max_CCL =100) | 306 | 0.999982 (Max_CCL =100) | 291 | 1 (Max_CCL =100) | 292 |
| Coverage area | Polygon model (Set 1: 16 vertices) | Polygon model (Set 2: 12 vertices) | Polygon model (Set 3: 9 vertices) | Polygon model (Set 4: 4 vertices) |
|---|---|---|---|---|
 |  |  |  |  |
| Rs = 30 (Case 1: Rc/Rs = 2) 50 (Case 2: Rc/Rs = 1.2) 72 (Case 3: Rc/Rs = 1/1.2) | [(29.9, 0°), (30, 4.9°), (29, 11.7°), (26.5, 18.3°), (24.3, 22°), (20.7, 26.6°), (13.5, 32.4°), (6, 38.7°), (0, 180°), (6, 321.3°), (13.5, 327.6°), (20.7, 333.4°), (24.3, 338°), (26.5, 341.7°), (29, 348.3°), (30, 30.1°)] (Case 1) [(49.9, 0°), (50, 4.9°), (48.3, 11.7°), (44.1, 18.3°), (40.6, 22°), (34.6, 26.6°), (22.3, 32.4°), (10, 38.7°), (0, 180°), (10, 321.3°), (22.3, 327.6°), (34.6, 333.4°), (40.6, 338°), (44.1, 341.7°), (48.3, 348.3°), (50, 355.1°)] (Case 2) [(72, 0°), (72, 4.9°), (69.6, 11.7°), (63.6, 18.3°), (58.32, 22°), (49.68, 26.6°), (32.4, 32.4°), (14.4, 38.7°), (0, 180°), (14.4, 321.3°), (32.4, 327.6°), (49.68, 333.4°), (58.32, 338°), (63.6, 341.7°), (69.6, 348.3°), (72, 355.1°)] (Case 3) | [(29.9, 0°), (30, 4.9°), (29, 11.7°), (26.5, 18.3°),(20.7, 26.6°), (6, 38.7°), (0, 180°), (6, 321.3°), (20.7, 333.4°), (26.5, 341.7°), (29, 348.3°), (30.1°)] (Case 1) [(49.9, 0°), (50, 4.9°), (48.3, 11.7°), (44.1, 18.3°), (34.6, 26.6°), (10, 38.7°), (0, 180°), (10, 321.3°), (34.6, 333.4°), (44.1, 341.7°), (48.3, 348.3°), (50, 355.1°)] (Case 2) [(71.76, 0°), (72, 4.9°), (69.6, 11.7°), (63.6, 18.3°), (49.68, 26.6°), (14.4, 38.7°), (0, 180°), (14.4, 321.3°), (49.68, 333.4°), (63.6, 341.7°), (69.6, 348.3°), (72, 355.1°)] (Case 3) | [(30, 4.9°), (26.5, 18.3°), (20.7, 26.6°), (6, 38.7°), (0, 180°),(6, 321.3°), (20.7, 333.4°), (26.5, 341.7°), (30, 355.1°)] (Case 1) [(50, 4.9°), (44.1, 18.3°), (34.6, 26.6°), (10, 38.7°), (0, 180°),(10, 321.3°), (34.6 333.4°), (44.1, 341.7°), (50, 355.1°)] (Case 2) [(72, 4.9°), (63.6, 18.3°), (49.68, 26.6°), (14.4, 38.7°), (0, 180°),(14.4, 321.3°), (49.68, 333.4°), (63.6, 341.7°), (72, 355.1°)] (Case 3) | [(30, 0°), (20.7, 26.6°), (0, 180°), (20.7, 333.4°)](Case 1)[(50, 0°), (34.6, 26.6°), (0, 180°), (34.6 333.4°)](Case 2)[(72, 0°), (49.68, 26.6°), (0, 180°), (49.68, 333.4°)](Case 3) |
| Polygon model (Set 1: 16 vertices) (rotation steps: 8) | Polygon model (Set 2: 12 vertices) (rotation steps: 8) | Polygon model (Set 3: 9 vertices) (rotation steps: 8) | Polygon model (Set 4: 4 vertices) (rotation steps: 8) | |||||
|---|---|---|---|---|---|---|---|---|
| Deployment area without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.95(Max_CCL = 45.8594) | 1000 | 0.9528(Max_CCL = 41.9922) | 1000 | 0.9512(Max_CCL = 40.832) | 1000 | 0.9518(Max_CCL = 26.1367) | 1000 |
| Case 2: Rc/Rs = 1.2 | 0.9911(Max_CCL = 100) | 519 | 0.9927(Max_CCL = 100) | 548 | 0.9943(Max_CCL =100) | 563 | 0.9996(Max_CCL =100) | 733 |
| Case 3: Rc/Rs = 1/1.2 | 1 (Max_CCL = 98.0664) | 392 | 1 (Max_CCL = 100) | 386 | 1 (Max_CCL = 100) | 394 | 1 (Max_CCL = 100) | 578 |
| Deployment area with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.9789(Max_CCL = 100) | 880 | 0.9861(Max_CCL = 100) | 928 | 0.9854(Max_CCL = 100) | 930 | 0.9916(Max_CCL = 55.5273) | 1000 |
| Case 2: Rc/Rs = 1.2 | 0.9926(Max_CCL = 100) | 414 | 0.9952(Max_CCL = 100) | 454 | 0.9954(Max_CCL =100) | 451 | 0.9995(Max_CCL =100) | 573 |
| Case 3: Rc/Rs = 1/1.2 | 1 (Max_CCL = 86.4648) | 272 | 0.9999(Max_CCL = 100) | 290 | 0.9999(Max_CCL =100) | 293 | 0.9999(Max_CCL =100) | 403 |
| Polygon model (16 vertices) (rotation steps: 8) | Polygon model (12 vertices) (rotation steps: 8) | Polygon model (9 vertices) (rotation steps: 8) | Polygon model (4 vertices) (rotation steps: 8) | |||||
|---|---|---|---|---|---|---|---|---|
| Max_CCL = 50.5 | ||||||||
| Deployment area without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.945 | 1000 | 0.9347 | 1000 | 0.9311 | 1000 | 0.8297 | 1000 |
| Case 2: Rc/Rs = 1.2 | 0.9797 | 470 | 0.9865 | 485 | 0.9912 | 507 | 0.9981 | 634 |
| Case 3: Rc/Rs = 1/1.2 | 0.9999 | 343 | 1 | 354 | 1 | 371 | 1 | 490 |
| Deployment area with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.9605 | 757 | 0.9662 | 792 | 0.9676 | 802 | 0.9895 | 973 |
| Case 2: Rc/Rs = 1.2 | 0.9851 | 378 | 0.9886 | 383 | 0.9913 | 389 | 0.9980 | 496 |
| Case 3: Rc/Rs = 1/1.2 | 0.9999 | 282 | 0.9999 | 288 | 0.9998 | 285 | 1 | 372 |
| Max_CCL = 100 | ||||||||
| Deployment area without obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.862 | 1000 | 0.8476 | 1000 | 0.8353 | 1000 | 0.7186 | 1000 |
| Case 2: Rc/Rs = 1.2 | 0.9911 | 519 | 0.9927 | 548 | 0.9943 | 563 | 0.9996 | 733 |
| Case 3: Rc/Rs = 1/1.2 | 1 | 388 | 1 | 386 | 1 | 394 | 1 | 578 |
| Deployment area with obstacles | coverage | #sensor | coverage | #sensor | coverage | #sensor | coverage | #sensor |
| Case 1: Rc/Rs = 2 | 0.9789 | 880 | 0.9861 | 928 | 0.9854 | 930 | 0.8651 | 1000 |
| Case 2: Rc/Rs = 1.2 | 0.9926 | 414 | 0.9952 | 454 | 0.9954 | 451 | 0.9995 | 573 |
| Case 3: Rc/Rs = 1/1.2 | 1 | 293 | 0.9999 | 290 | 0.9999 | 293 | 0.9999 | 403 |
© 2009 by the authors; licensee Molecular Diversity Preservation International, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution license (http://creativecommons.org/licenses/by/3.0/).
Share and Cite
Wu, C.-H.; Chung, Y.-C. A Polygon Model for Wireless Sensor Network Deployment with Directional Sensing Areas. Sensors 2009, 9, 9998-10022. https://doi.org/10.3390/s91209998
Wu C-H, Chung Y-C. A Polygon Model for Wireless Sensor Network Deployment with Directional Sensing Areas. Sensors. 2009; 9(12):9998-10022. https://doi.org/10.3390/s91209998
Chicago/Turabian StyleWu, Chun-Hsien, and Yeh-Ching Chung. 2009. "A Polygon Model for Wireless Sensor Network Deployment with Directional Sensing Areas" Sensors 9, no. 12: 9998-10022. https://doi.org/10.3390/s91209998