Research on the Axial Force of Conical-Rotor Permanent Magnet Synchronous Motors with Turbines


Abstract
:1. Introduction
2. Theoretical Analysis of CR-PMSM
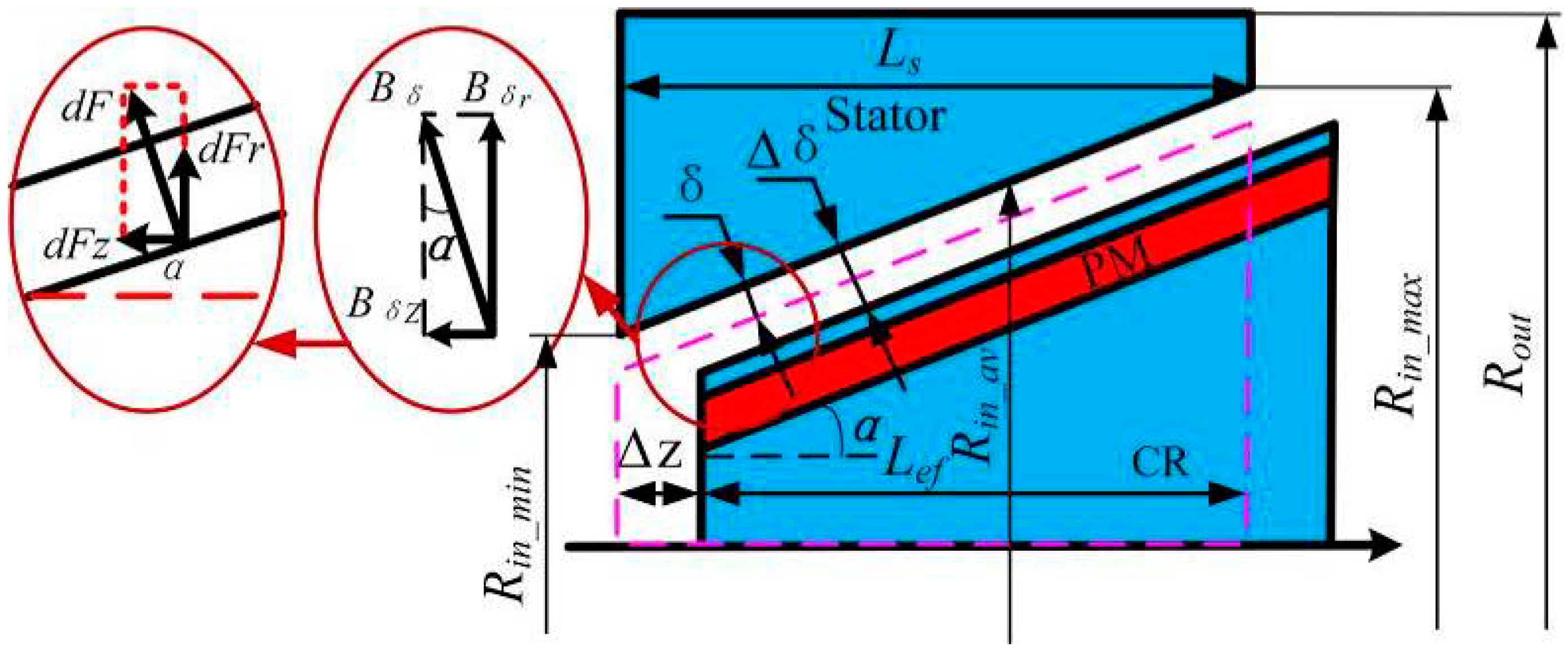
2.1. Theoretical Calculation for Magnetic Circuit
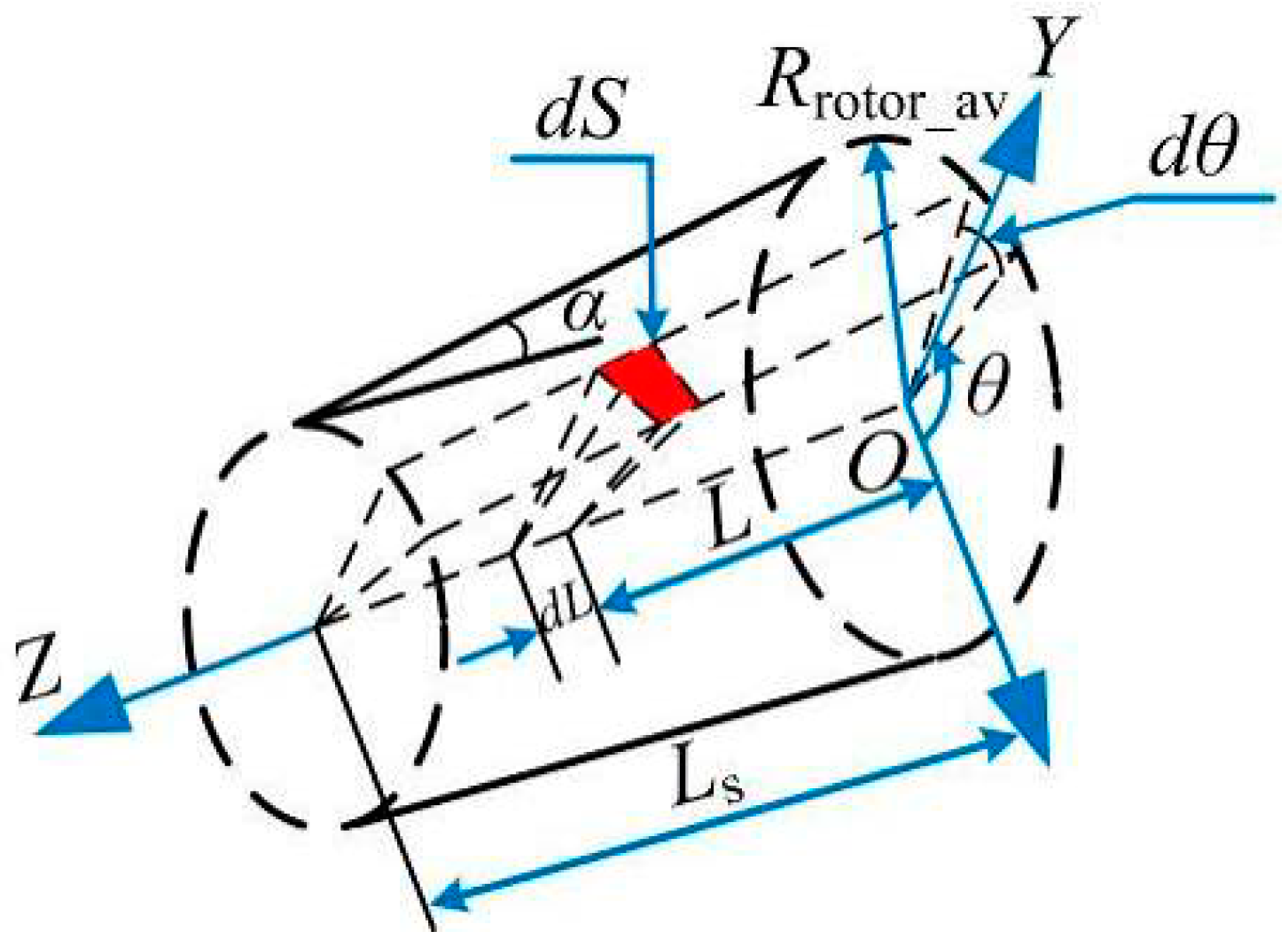
2.2. Modeling of Axial Magnetic Force Produced for CR-PMSM
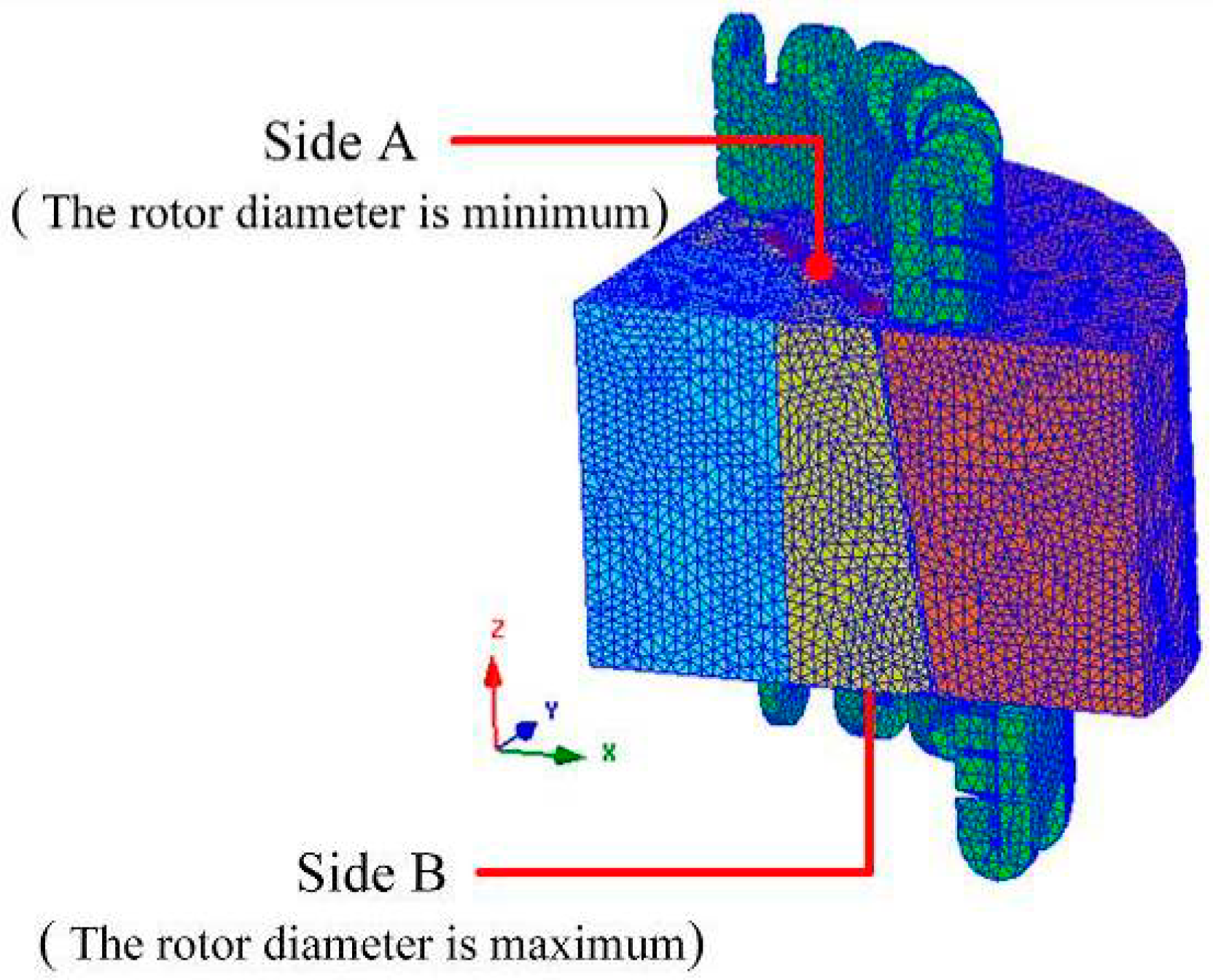
3. 3-D FE Analysis of CR-PMSM
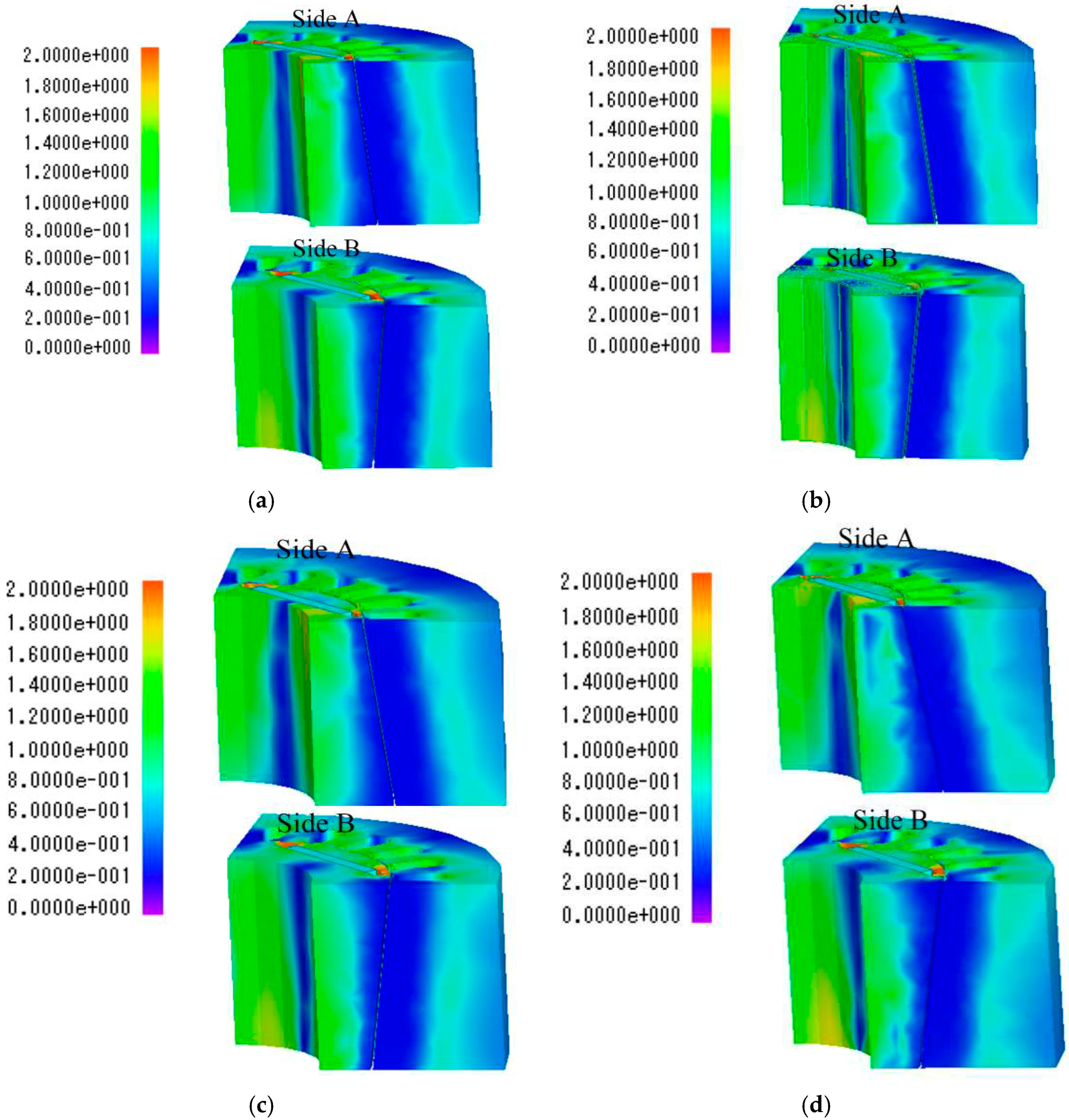
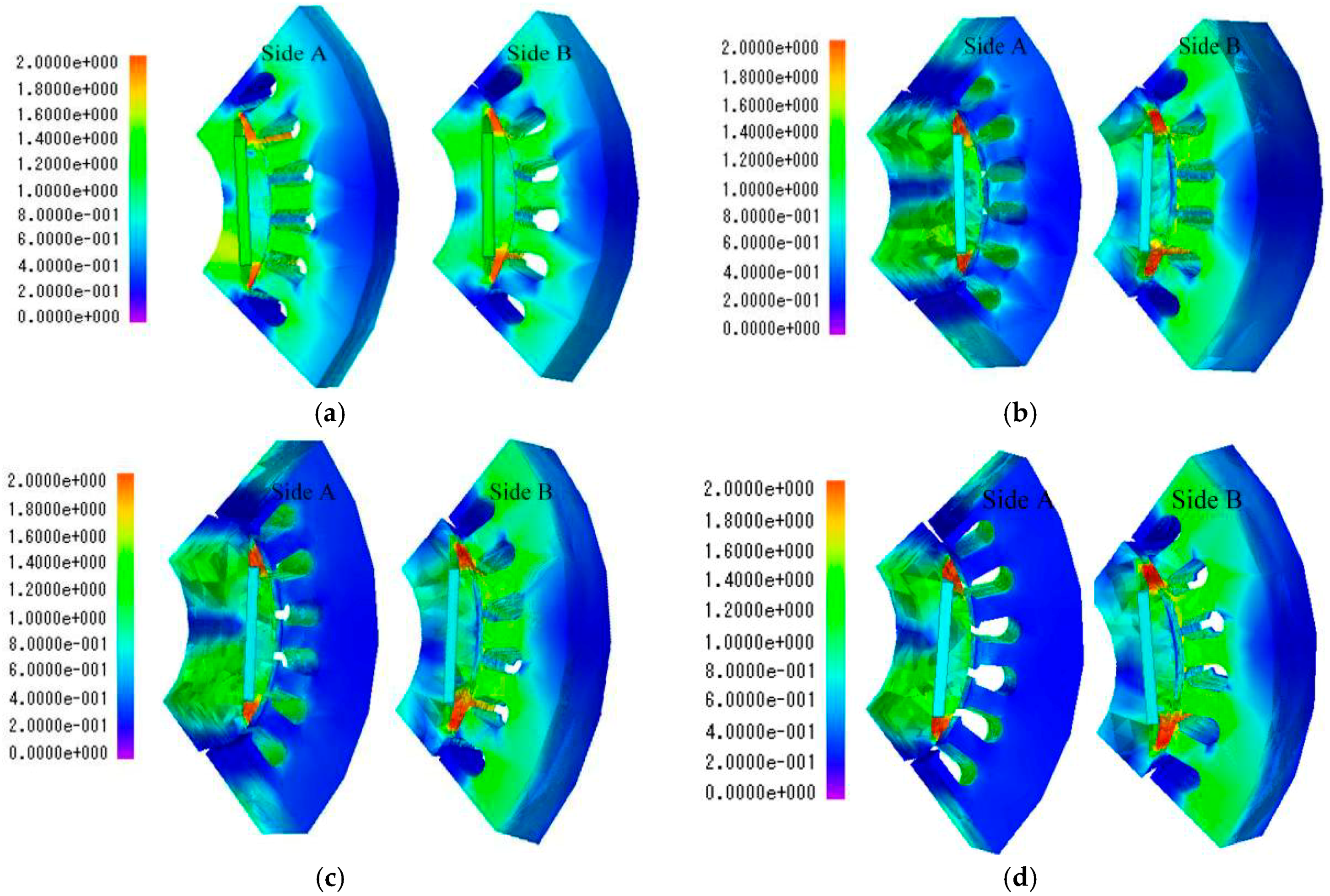
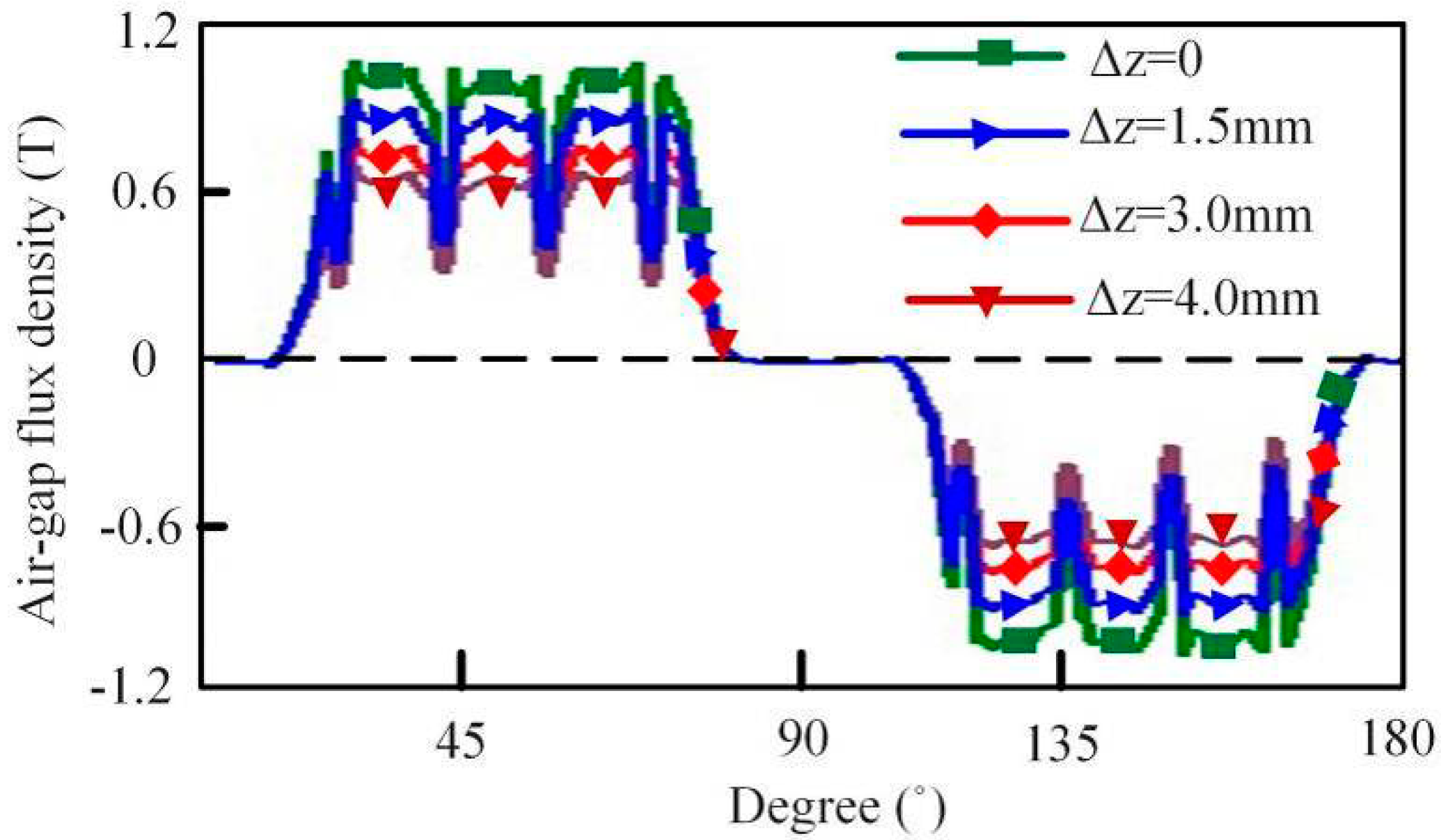
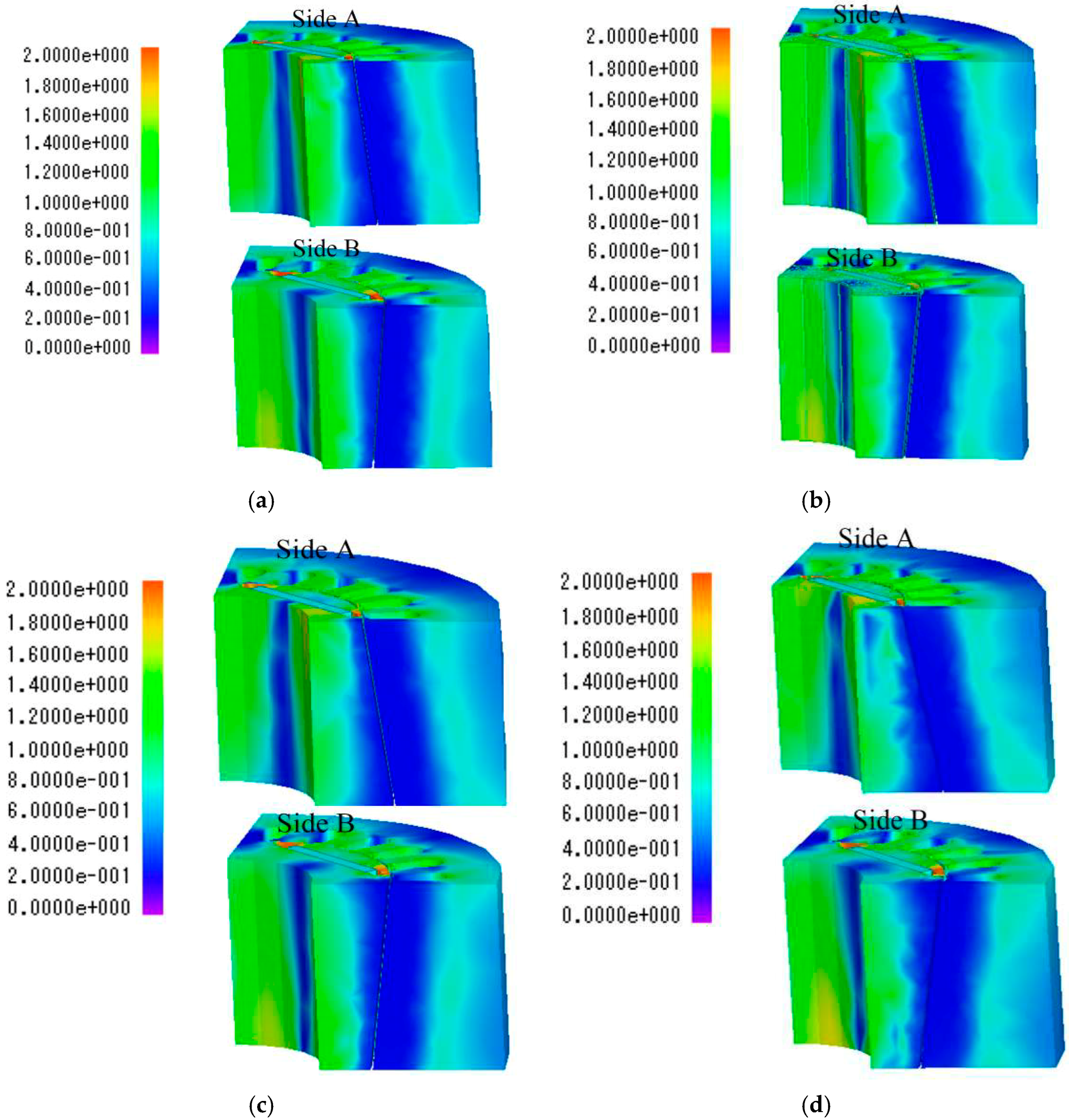
3.1. Magnetic Field Distribution
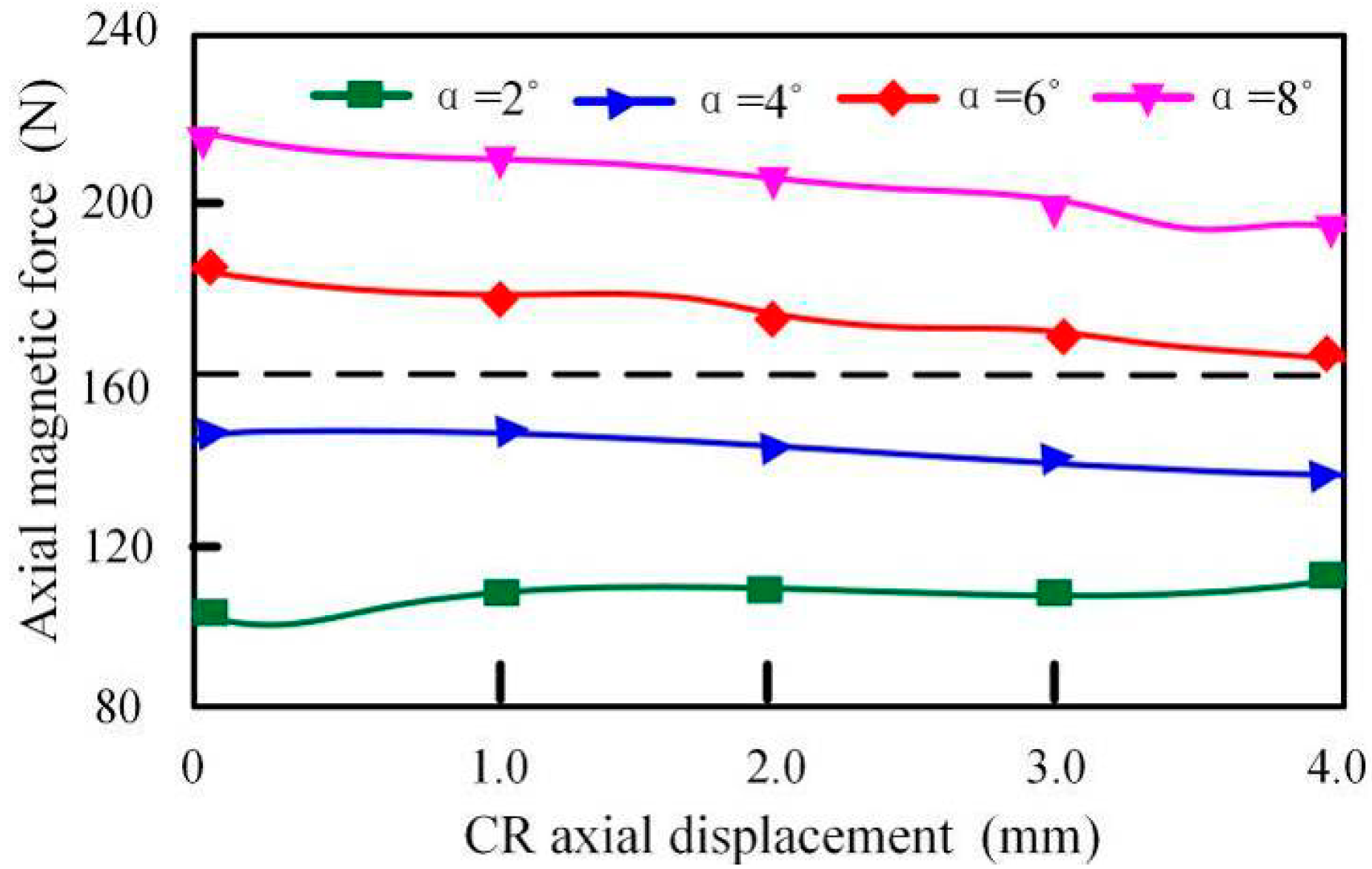
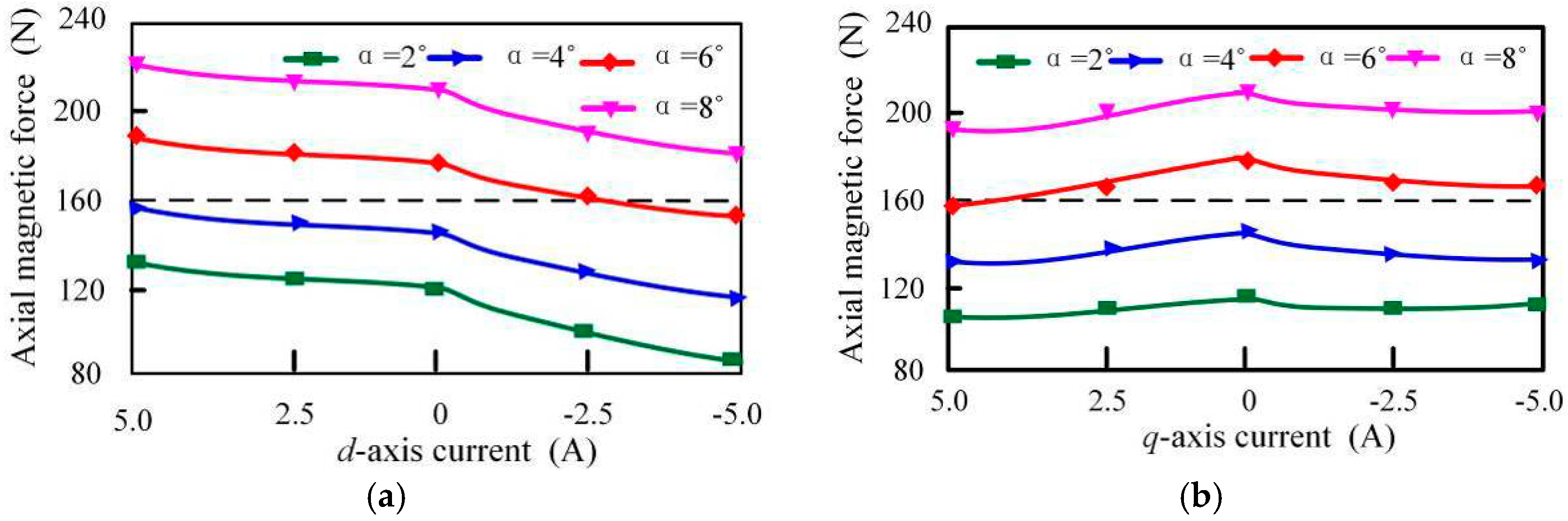
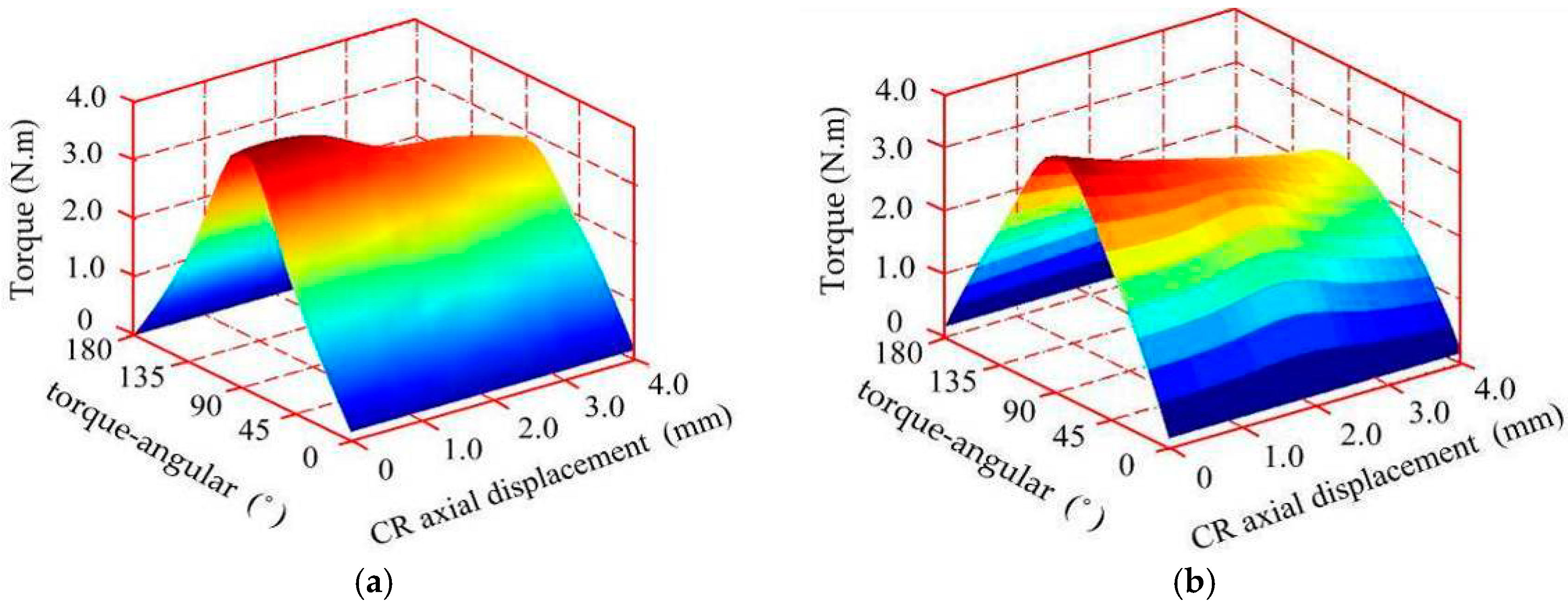
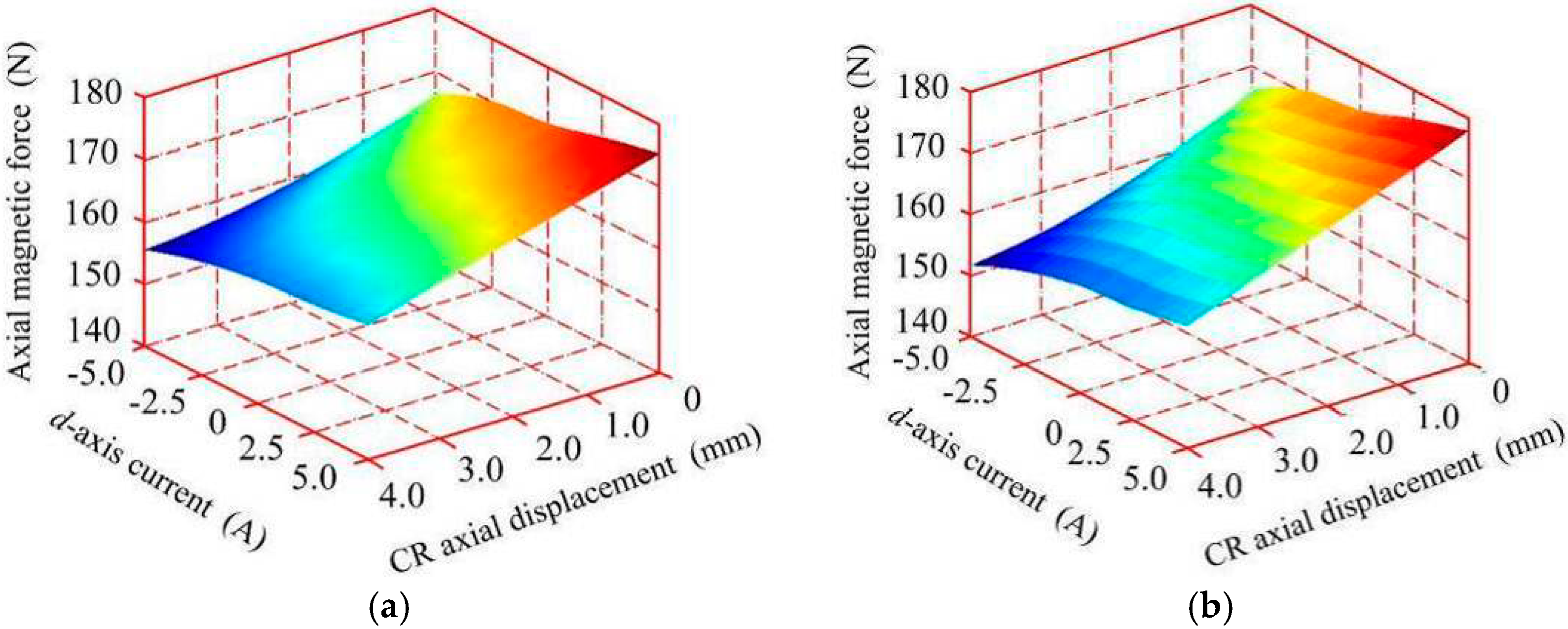
3.2. Analysis of the Axial Magnetic Force
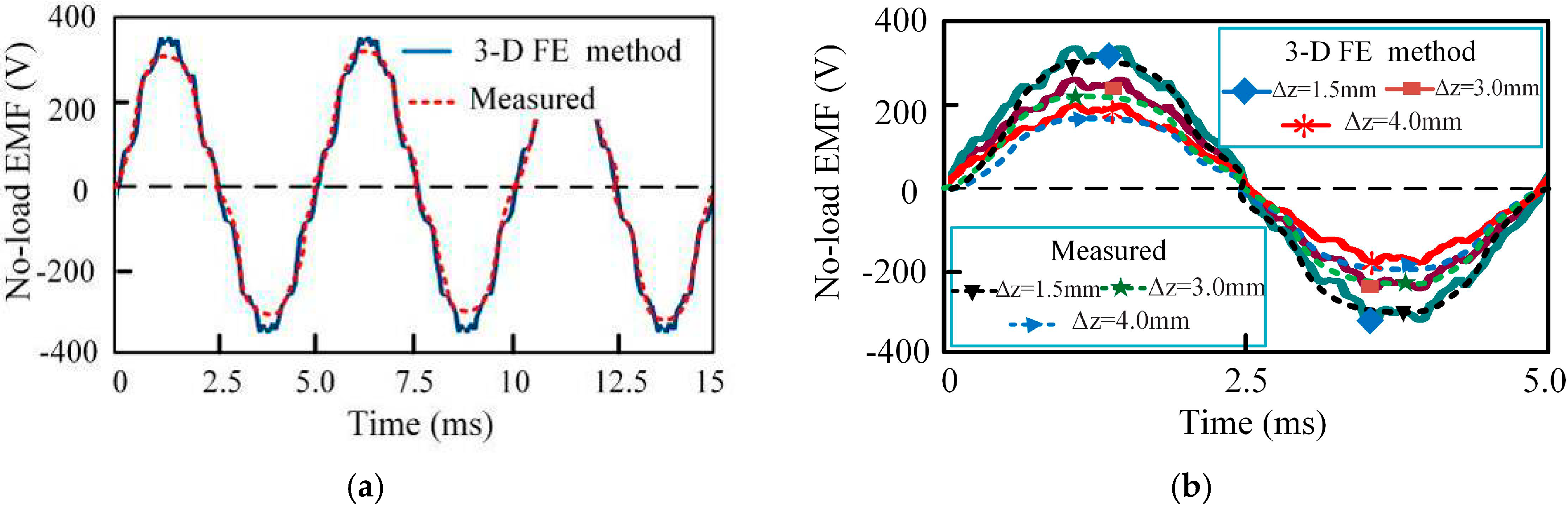
4. Experimental Validation and Analysis
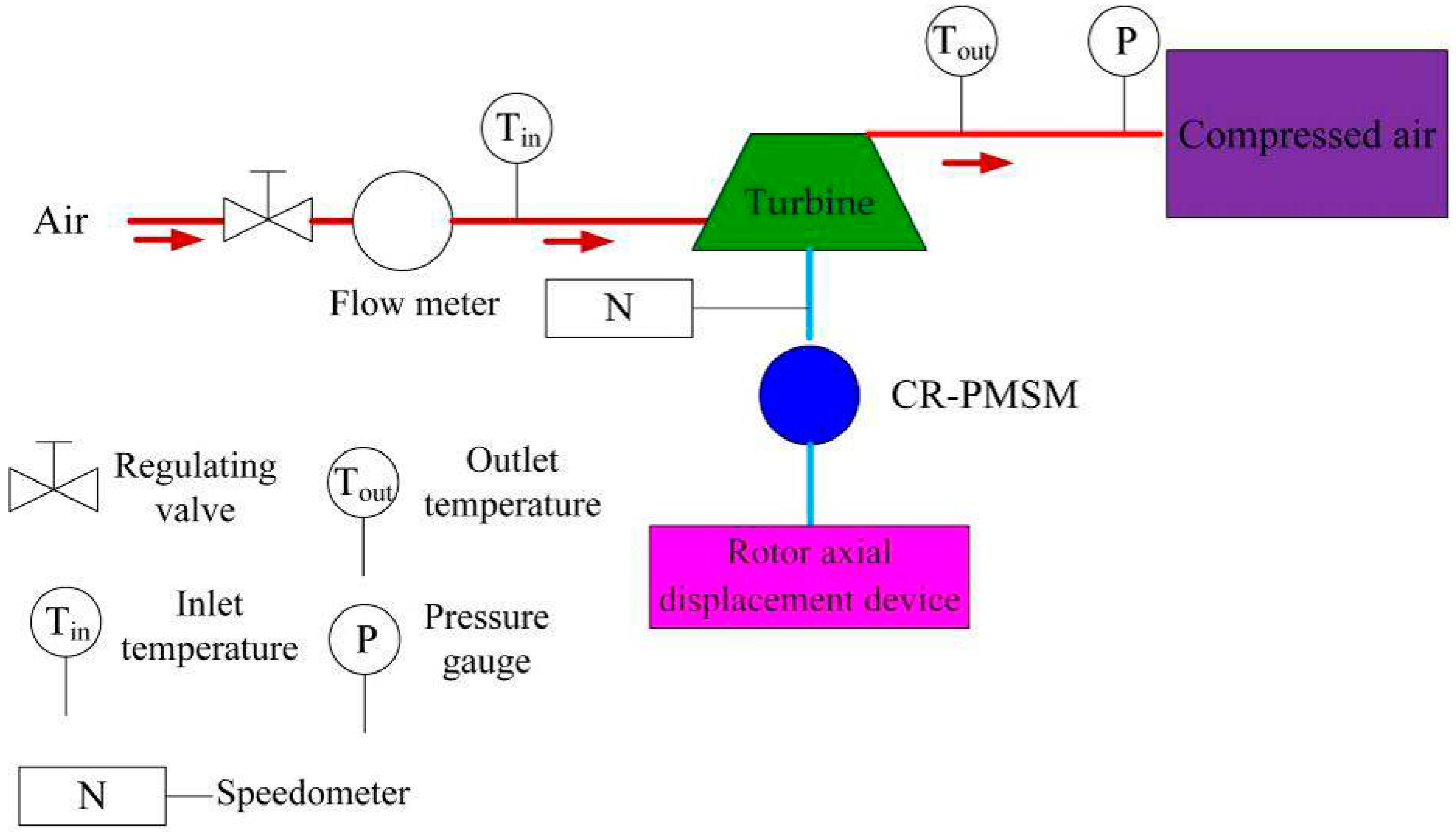
4.1. Test Rig of Prototype Machine
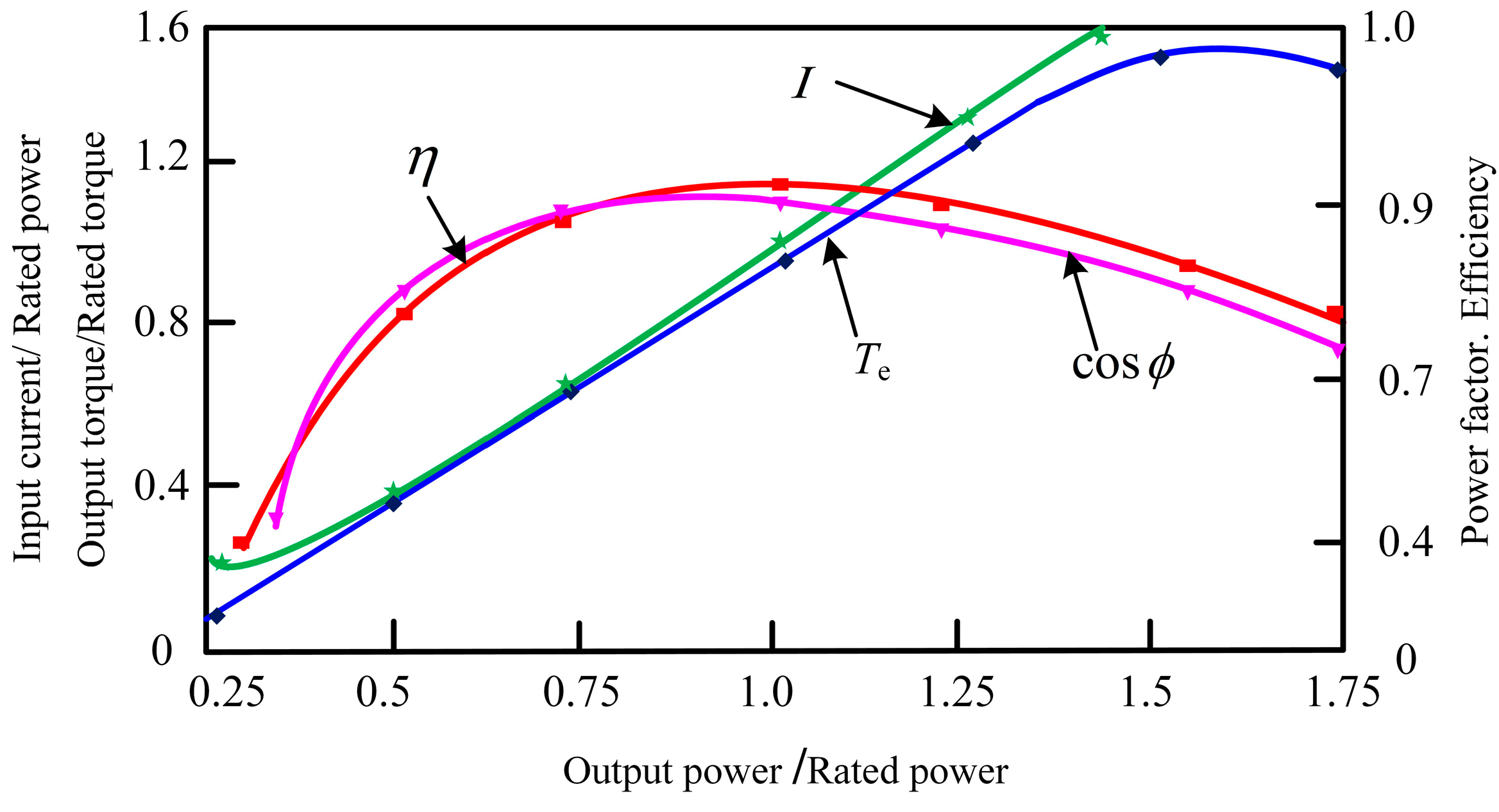
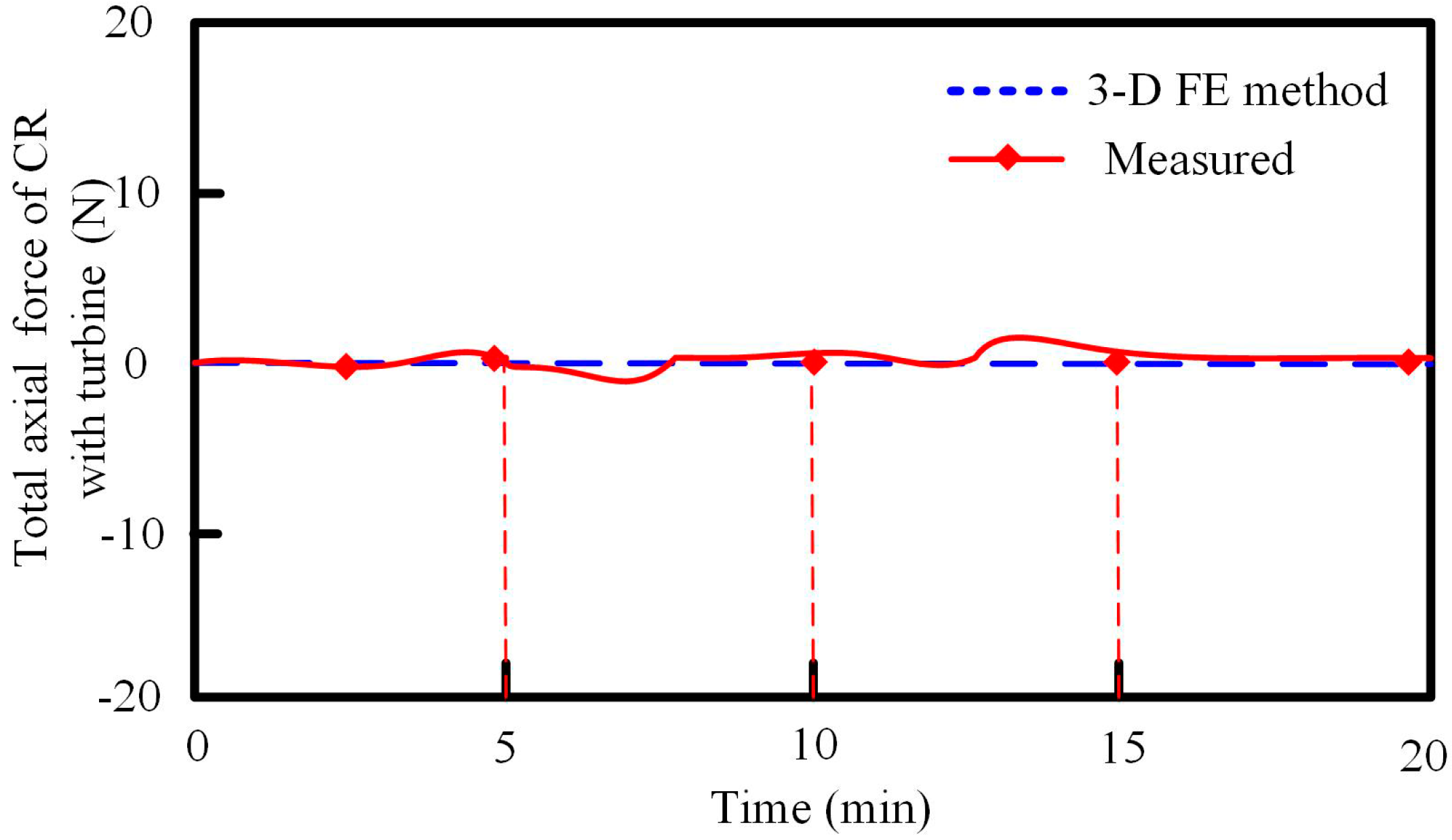
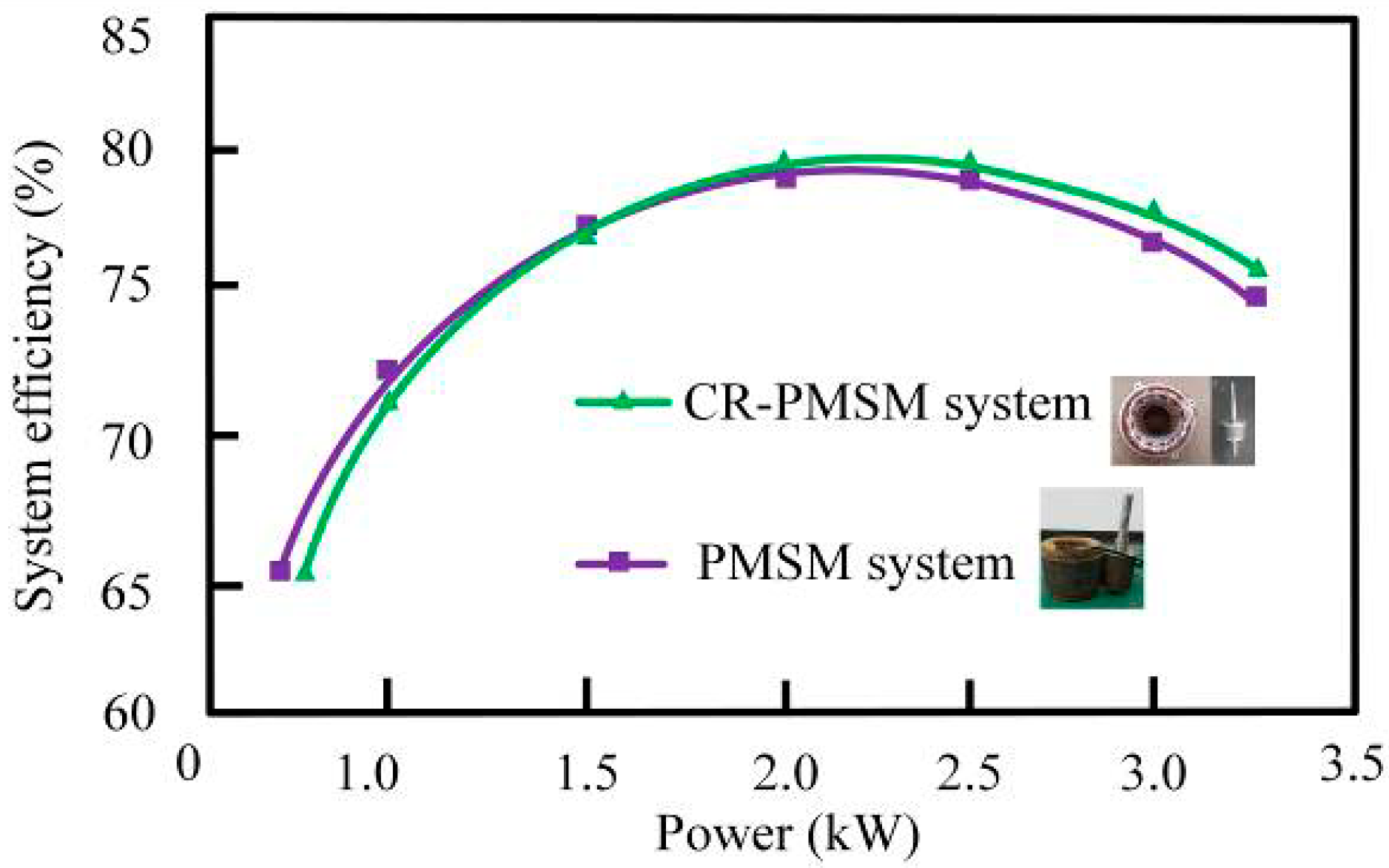
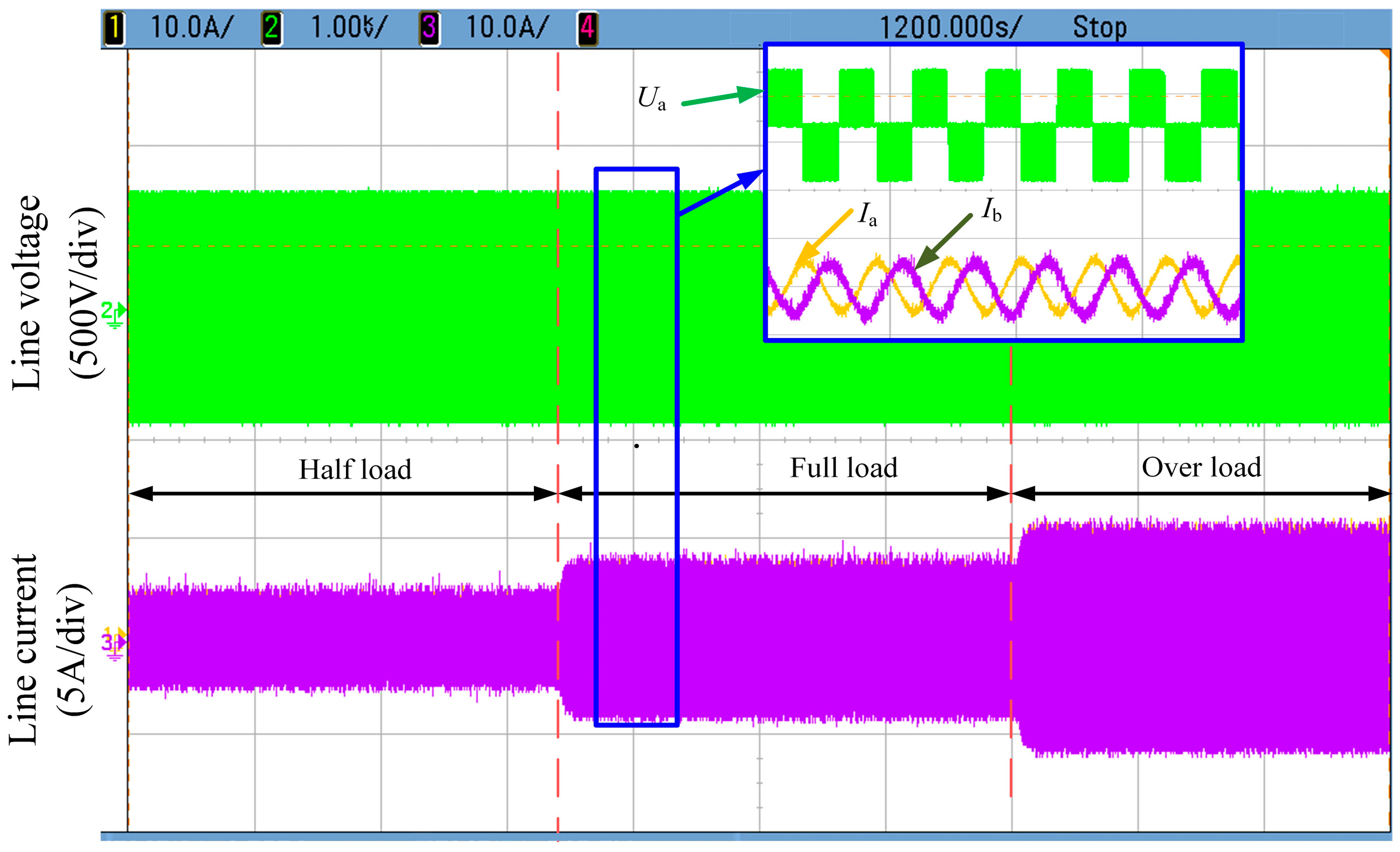
4.2. Analysis of Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Lopez-Torres, C.; Riba, J.R.; Garcia, A.; Romeral, L. Detection of Eccentricity Faults in Five-Phase Ferrite-PM Assisted Synchronous Reluctance Machines. Appl. Sci. 2017, 7, 565. [Google Scholar] [CrossRef]
- Oumaamar, M.E.; Maouche, Y.; Boucherma, M.; Khezzar, A. Static air-gap eccentricity fault diagnosis using rotor slot harmonics in line neutral voltage of three-phase squirrel cage induction motor. Mech. Syst. Signal Process. 2017, 84, 584–597. [Google Scholar] [CrossRef]
- Glowacz, A. Fault diagnostics of acoustic signals of loaded synchronous motor using smofs-25-expanded and selected classifiers. Tehnicki Vjesnik-Technical Gazette 2016, 23, 1365–1372. [Google Scholar]
- Kurokawa, J.; Toykokura, T. Study on the axial thrust of the radial flow turbomachinery. In Proceedings of the 2nd International JSME Symposium Fluid Machinery and Fluidics, Tokyo, Japan, 4–9 September 1972; pp. 31–40. [Google Scholar]
- An, Y.; Liu, G.; Meng, Z.; Wang, P.; Wen, H. Analysis and experiment of magnetic force in permanent magnet axial thrust balance structure for canned motor pump. In Proceedings of the International Conference on Intelligent Control and Information Processing, Dalian, China, 12 August–15 August 2010; pp. 732–734. [Google Scholar]
- Wang, K.; Sun, J.; He, Z.; Song, P. Prediction of axial thrust load acting on a cryogenic liquid turbine impeller. In Proceedings of the ASME Turbo Expo, Vancouver, BC, Canada, 6–11 June 2011; pp. 487–498. [Google Scholar]
- He, Y.L.; Deng, W.Q.; Peng, B.; Ke, M.Q.; Tang, G.J.; Wan, S.T.; Liu, X.Y. Stator Vibration Characteristic Identification of Turbogenerator among Single and Composite Faults Composed of Static Air-Gap Eccentricity and Rotor Interturn. Shock Vib. 2016, 2016, 5971081. [Google Scholar] [CrossRef]
- Chai, F.; Zhao, K.; Li, Z.; Gan, L. Flux weakening performance of permanent magnet synchronous motor with a conical rotor. IEEE Trans. Magn. 2017, 53, 536–545. [Google Scholar] [CrossRef]
- Munteanu, G.; Binder, A.; Dewenter, S. Five-axis magnetic suspension with two conical air gap bearingless PM synchronous half-motors. In Proceedings of the International Symposium Power Electronics, Electrical Drives, Automation and Motion, Sorrento, Italy, 20–22 June 2012; pp. 1246–1251. [Google Scholar]
- Chen, Q.; Liu, G.; Zhao, W.; Shao, M. Nonlinear adaptive lumped parameter magnetic circuit analysis for spoke-type fault tolerant permanent-magnet motors. IEEE Trans. Magn. 2013, 49, 5150–5157. [Google Scholar] [CrossRef]
- Raminosoa, T.; Rasoanarivo, I.; Meibody-Tabar, F.; Sargos, F.M. Time-stepping simulation of synchronous reluctance motors using a nonlinear reluctance network method. IEEE Trans. Magn. 2008, 44, 4618–4625. [Google Scholar] [CrossRef]
- Immonen, P.; Ruuskanen, V.; Pyrhonen, J. Moving magnet linear actuator with self-holding functionality. IET Electr. Syst. Transp. 2018, 8, 182–187. [Google Scholar] [CrossRef]
- Kano, Y.; Kosaka, T.; Matsui, N. Simple nonlinear magnetic analysis for permanent-magnet motors. IEEE Trans. Ind. Appl. 2005, 41, 1205–1214. [Google Scholar] [CrossRef]
- Tangudu, J.K.; Jahns, T.M.; El-Refaie, A.; Zhu, Z.Q. Lumped parameter magnetic circuit model for fractional-slot concentrated-winding interior permanent magnet machines. In Proceedings of the IEEE Energy Conversion Congress and Exposition, San Jose, CA, USA, 20–24 September 2009; pp. 2423–2430. [Google Scholar]
- Feng, X.H. Taper Asynchronous Motor, 1st ed.; Huazhong University of Science & Technology Press: Wuhan, China, 1996; pp. 15–21. (In Chinese) [Google Scholar]
- Ruuskanen, V. Effect of armature reaction on the core losses of the permanent magnet synchronous motor. Electr. Eng. 2017, 99, 85–92. [Google Scholar] [CrossRef]
- Bernard, N.; Missoum, R.; Dang, L.; Bekka, N.; Ahmed, H.B.; Zaim, M.E.H. Design methodology for high-speed permanent magnet synchronous machines. IEEE Trans. Energy Convers. 2017, 31, 477–485. [Google Scholar] [CrossRef]
- Xu, S.; Fang, J. A novel conical active magnetic bearing with CLAW structure. IEEE Trans. Magn. 2014, 50, 8101108. [Google Scholar]
- Sugimoto, H.; Tanaka, S.; Chiba, A.; Asama, J. Principle of a novelsingle-drive bearingless motor with cylindrical radial gap. IEEE Trans. Ind. Appl. 2015, 51, 3696–3706. [Google Scholar] [CrossRef]
- Meessen, K.J.; Paulides, J.J.H.; Lomonova, E.A. Force calculations in 3-D cylindrical structures using Fourier analysis and the Maxwell stress tensor. IEEE Trans. Magn. 2013, 49, 536–545. [Google Scholar] [CrossRef]
- Dutta, R.; Rahman, M.F. A comparative analysis of two test methods of measuring d- and q-axes inductances of interior permanent-magnet machine. IEEE Trans. Magn. 2006, 42, 3712–3718. [Google Scholar] [CrossRef]
- Chai, F.; Ou, L.; Pei, Y.T. Research on flux-weakening of dual-stator conical permanent magnet synchronous motors. Trans. China Electro-Tech. Soc. 2013, 28, 12–18. [Google Scholar]
- Gysen, B.L.J.; Meessen, K.J.; Paulides, J.J.H.; Lomonova, E.A. General formulation of the electromagnetic field distribution in machines and devices using Fourier analysis. IEEE Trans. Magn. 2010, 46, 39–52. [Google Scholar] [CrossRef]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Parameters | Value |
|---|---|---|
| PN | Rated power | 2.0 kW |
| n | Rated speed | 6000 r/min |
| p | Pole pairs | 2 |
| IN | Rated current | 4.2 A |
| Ls | Core length | 52 mm |
| Rout | Radius of stator | 83.5 mm |
| Rin_av | Average inner radius of rotor | 52.75 mm |
| δ | Air-gap | 0.7 mm |
| α | Cone angle | 6° |
| Qs | Stator slot number | 24 |
| Δz_max. | Maximum axial displacement of rotor | 4 mm |
| Parameters | Symbol | Proposed CR-PMSM | Conventional PMSM | |
|---|---|---|---|---|
| Speed | n | 6000 r/min | 6000 r/min | |
| Outer radius of stator | Rout | 83.5 mm | 83.5 mm | |
| Average inner radius of rotor | Rin_av | 52.75 mm | 53.5 mm | |
| Length of iron core | Ls | 52 mm | 50 mm | |
| Out power | PN | 2.0 kW | 2.1 kW | |
| Motor constant | CA | 0.573 N.m/Sqrt(W) | 0.601 N.m/Sqrt(W) | |
| Manufacturing and materials cost | Stator | - | 45.2 $ | 37.9 $ |
| Rotor | - | 37.1 $ | 30.7 $ | |
| PM | - | 20.3 $ | 19.3 $ | |
| Total | - | 102.6 $ | 87.9 $ | |
| Symbol | Method | Load Conditions | ||
|---|---|---|---|---|
| Half Load | Full Load | Over Load | ||
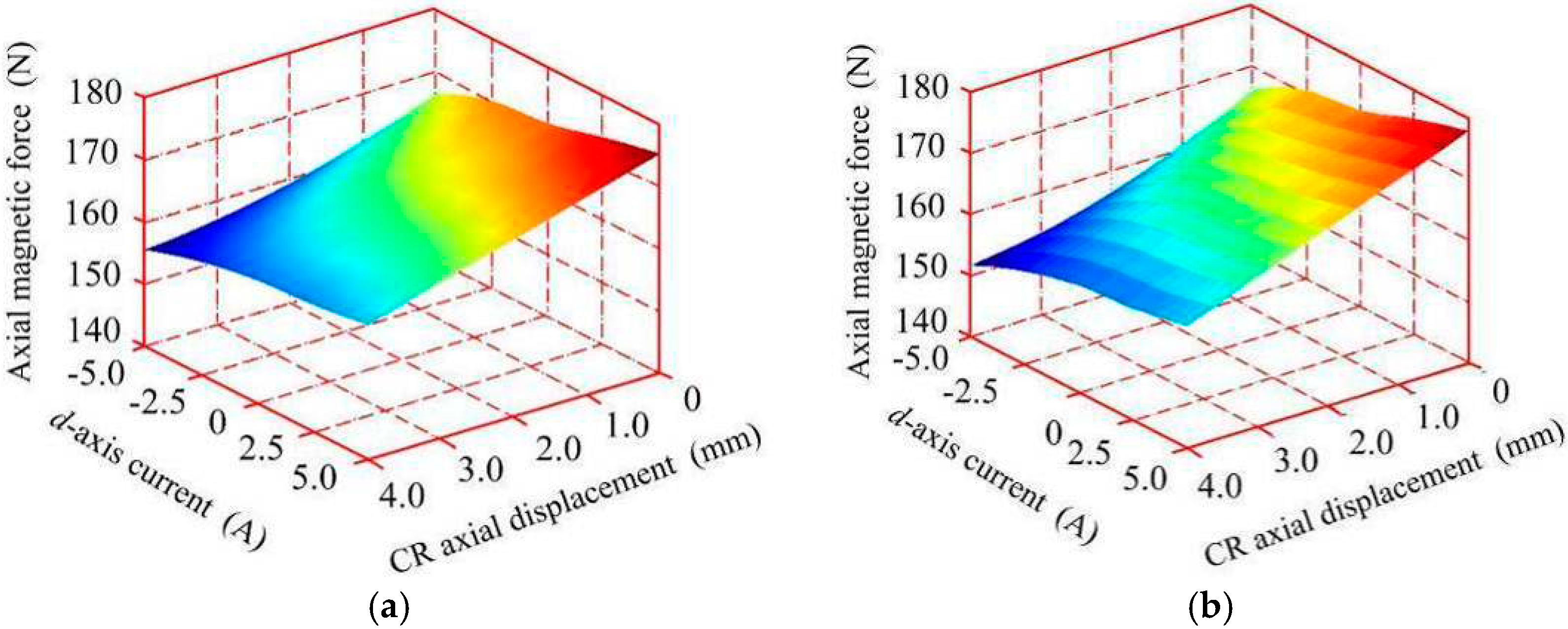
| FZ | 3-D FEM | 91.6 N | 171.5 N | 225.6 N |
| Measured | 89.5 N | 168.2 N | 221.9 N | |
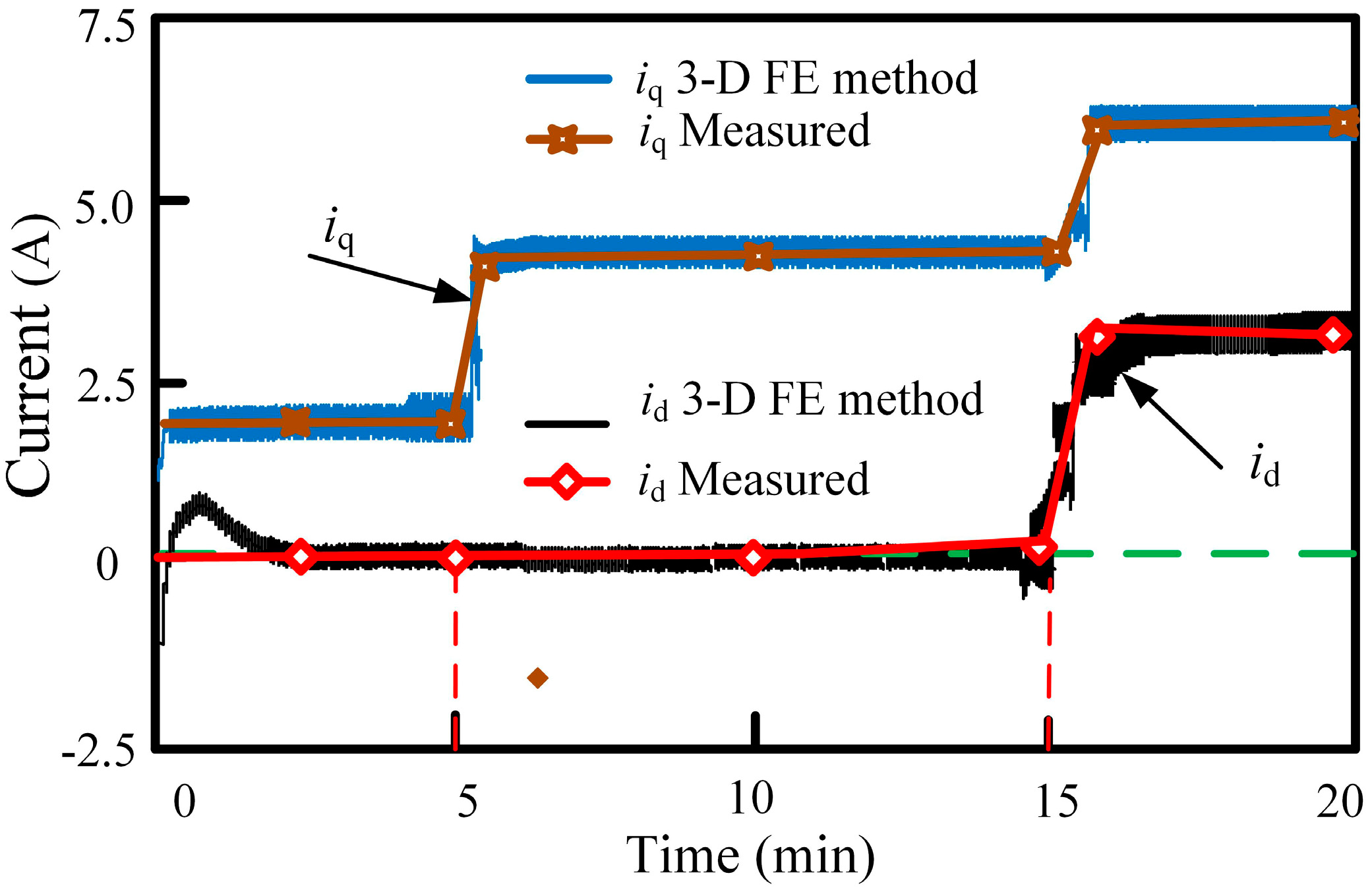
| IN | 3-D FEM | 1.9 A (id = 0, iq = 1.9) | 4.18 A (id = 0, iq = 4.18) | 6.8 A (id = 3.2, iq = 6.03) |
| Measured | 1.88 A (id = 0, iq = 1.88) | 4.25 A (id = 0, iq = 4.25) | 7.0 A (id = 3.5, iq = 6.08) | |
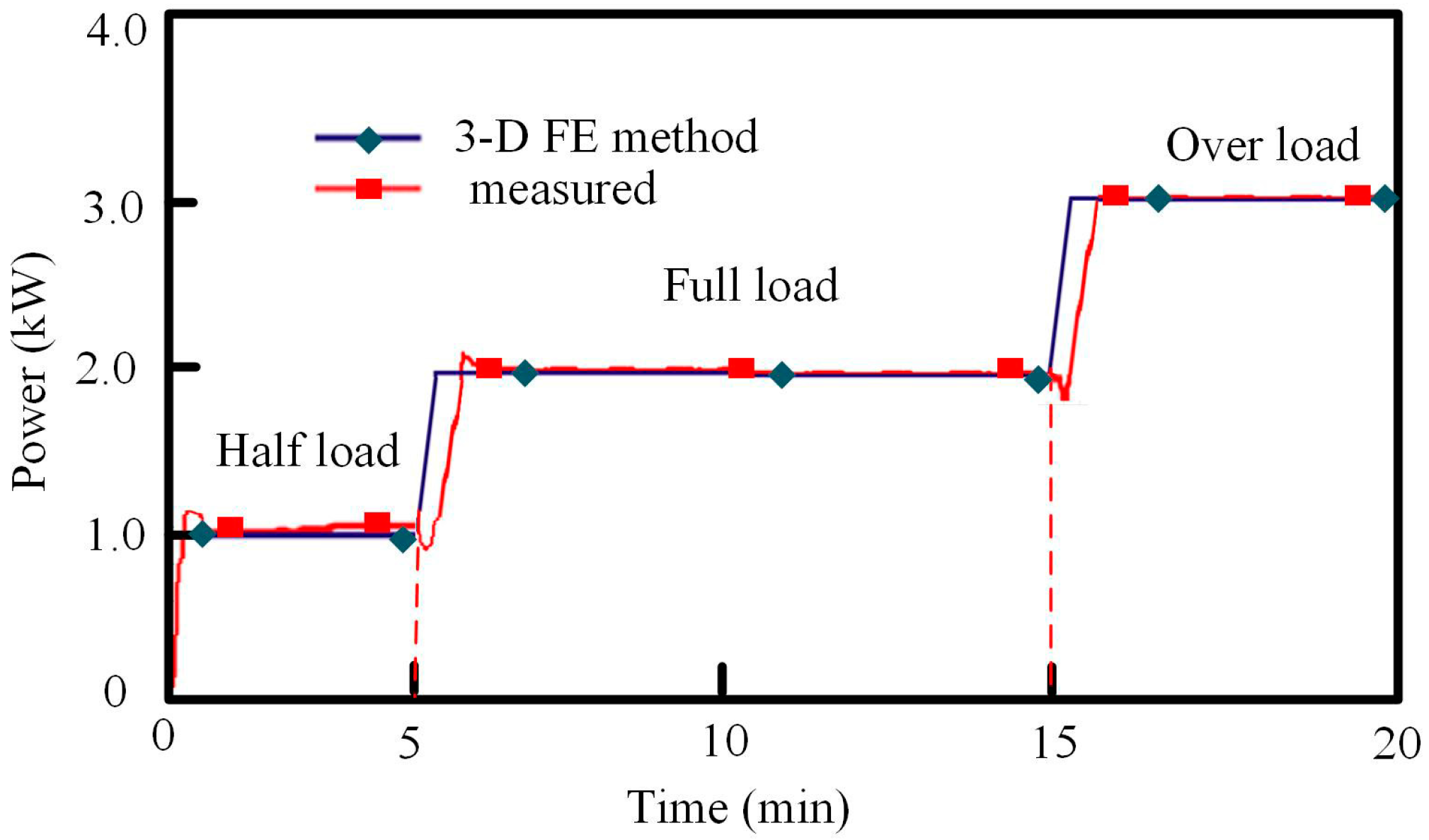
| PN | 3-D FEM | 1.1 kW | 1.9 kW | 2.9 kW |
| Measured | 0.9 kW | 1.85 kW | 2.88 kW | |
| Symbol | Calculation | 3-D FEM | Measured |
|---|---|---|---|
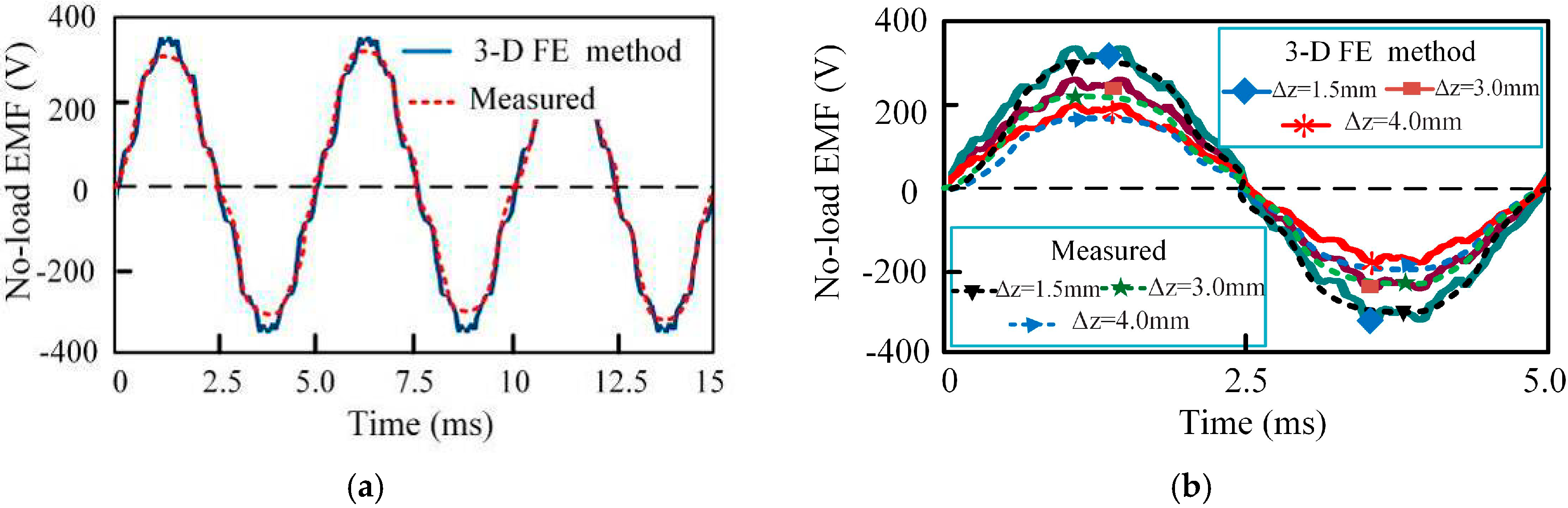
| Back-EMF under Δz = 0 | 241.6 V | 240.5 V | 238.2 V |
| Back-EMF under Δz = 4.0 mm | 193.3 V | 192.4 V | 190.5 V |
| The air gap flux density changing ratio CB | 17.8% | 17.2% | |
| The effective air-gapspace decrease ratio CS | 4.8% | 4.5% | |
| The axial magnetic force changing ratio FΔz,id | 34.1% | 32.5% | 29.4% |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, J.; Huang, S.; Guo, C.; Feng, Y. Research on the Axial Force of Conical-Rotor Permanent Magnet Synchronous Motors with Turbines. Energies 2018, 11, 2532. https://doi.org/10.3390/en11102532
Wang J, Huang S, Guo C, Feng Y. Research on the Axial Force of Conical-Rotor Permanent Magnet Synchronous Motors with Turbines. Energies. 2018; 11(10):2532. https://doi.org/10.3390/en11102532
Chicago/Turabian StyleWang, Jiabao, Shoudao Huang, Chao Guo, and Yaojing Feng. 2018. "Research on the Axial Force of Conical-Rotor Permanent Magnet Synchronous Motors with Turbines" Energies 11, no. 10: 2532. https://doi.org/10.3390/en11102532
APA StyleWang, J., Huang, S., Guo, C., & Feng, Y. (2018). Research on the Axial Force of Conical-Rotor Permanent Magnet Synchronous Motors with Turbines. Energies, 11(10), 2532. https://doi.org/10.3390/en11102532