Analysis, Design and Dynamic Simulation of Novel Limited Swing Angle Torque Permanent Magnet Motor for High Voltage Circuit Breaker Application


Abstract
:1. Introduction
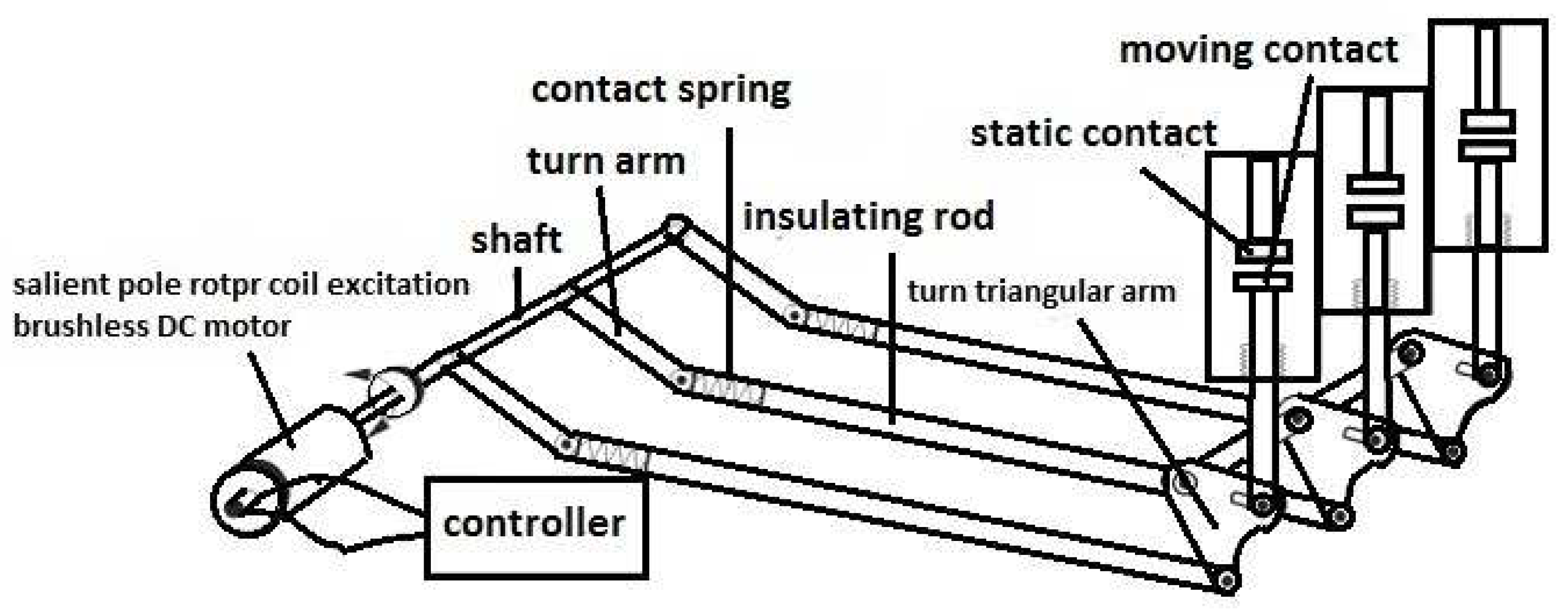
2. Novel Structure of LSATPMM
3. Working Principle of LSATPMM
- The air gap is uniform.
- The core magnetic path in the stator and rotor is not saturated, and its magnetic potential falling is negligible.
- The effect of the open slot is insignificant.
3.1. The Equation of Opening Motion Analysis
3.2. The Equation of Closing Motion Analysis
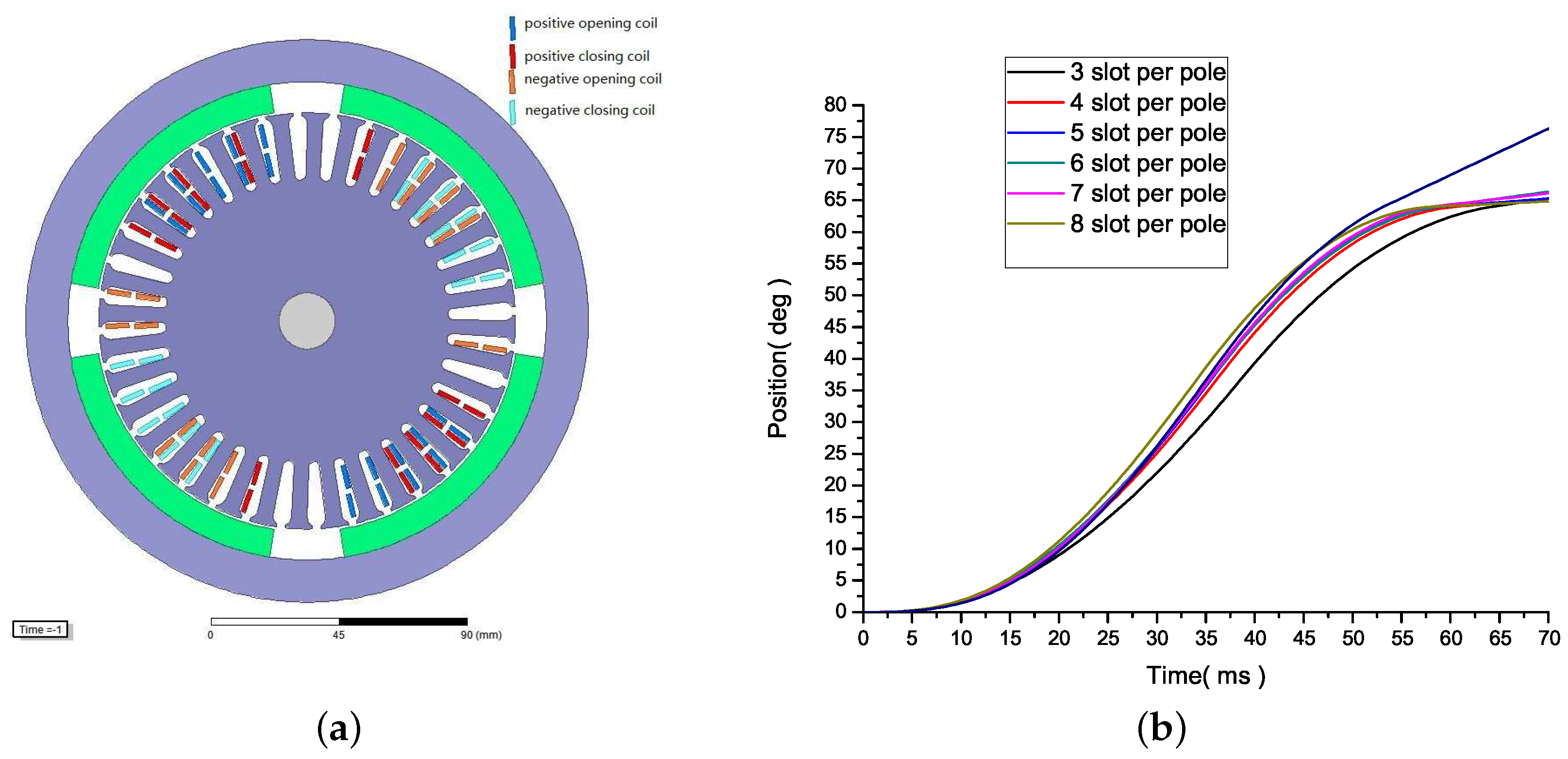
4. Numerical Analysis and Simulation Results
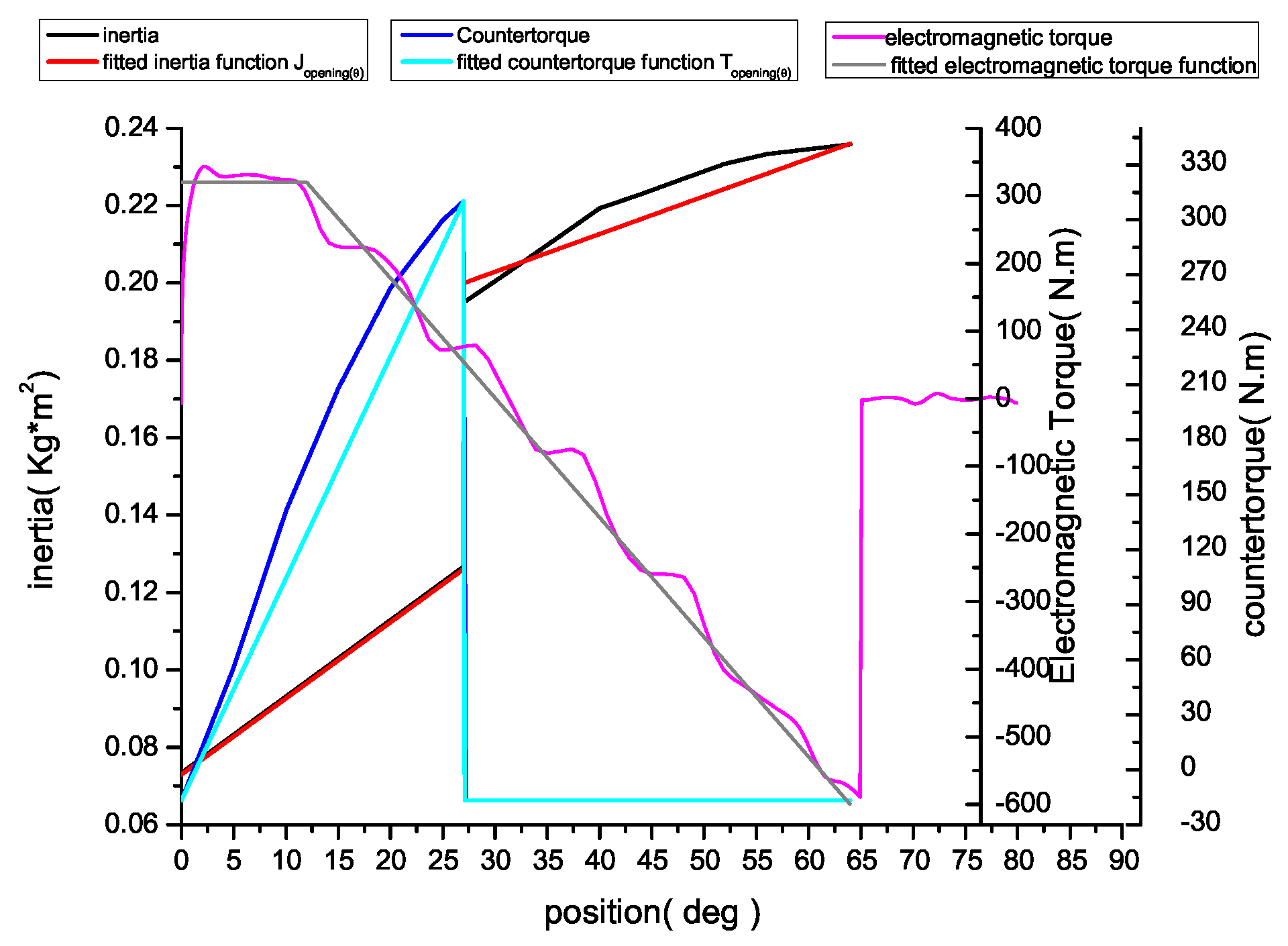
4.1. The Opening Characteristic
4.2. The Closing Characteristic
4.3. The Fault Tolerance Characteristic
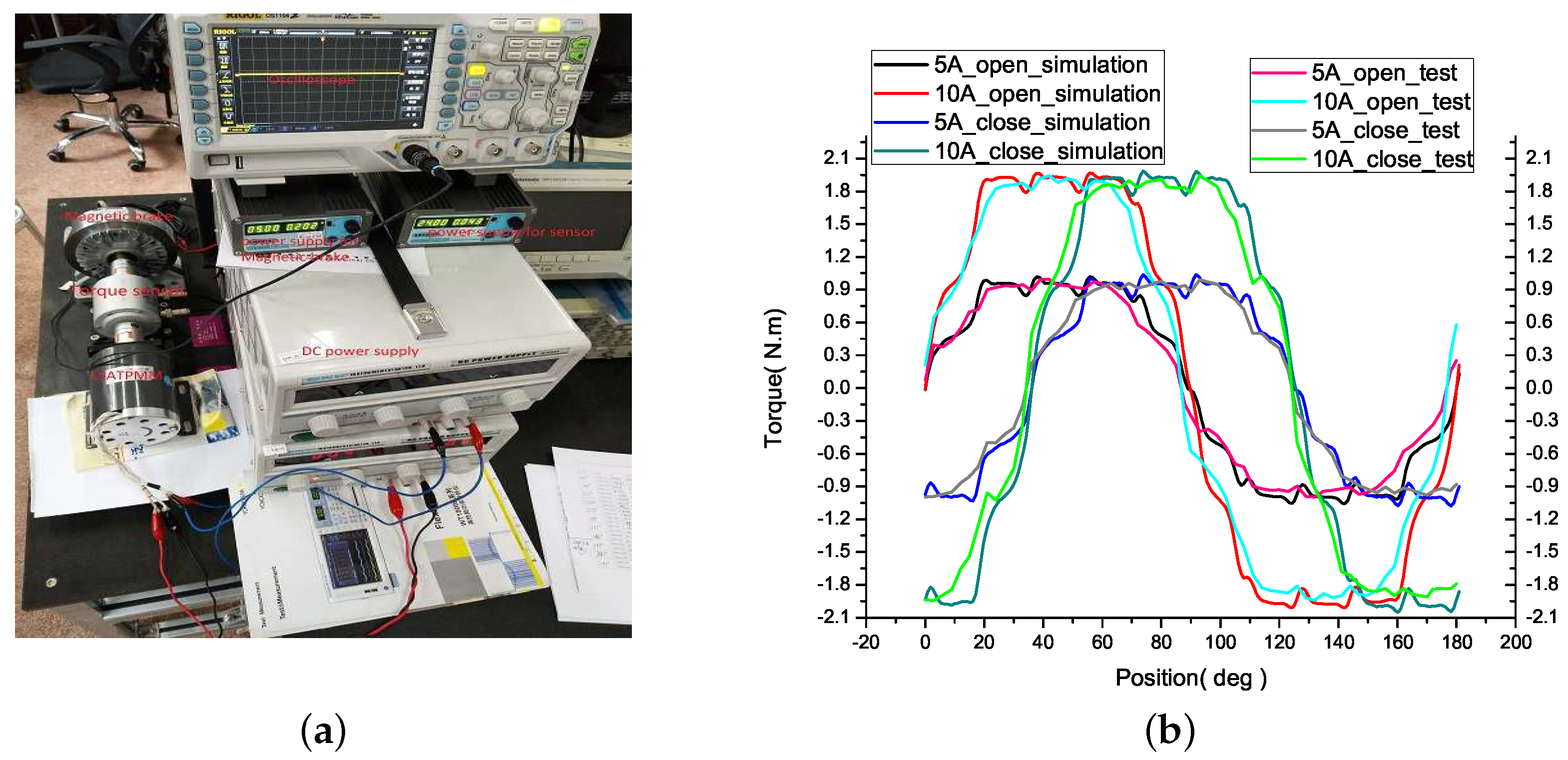
5. Experimental Test-Stand and Results
6. Discussion
- A novel LSATPMM is presented, which has two sets of windings that are mounted at a specific location to react the reactive force at the end, moving without a change in the current, which is difficult for a conventional Limited-Angle Torque Motor.
- In published papers, the coils, per pole per phase, are normally continuous in the slots. However, the coils, per pole per phase, of LSATPMM are not all continuous.
- The LSATPMM has only one coil per winding, which is one phase less than the conventional three phases Limited-Angle Torque Motor.
- The fault tolerance and design procedure of LSATPMM for HVCB are discussed.
7. Conclusions
- LSATPMM has two sets of windings, and only one coil per winding, which is one coil less than the conventional three-phase Limited-Angle Torque Motor.
- The opening and closing torque of LSATPMM can theoretically be adjusted to meet the required characteristics of the circuit breaker, i.e., short closing process time, short contact bounce time and as few excess strokes as possible.
- The drive circuit for LSATPMM has two controllable thyristors, which is better than the drive circuit of the conventional Limited-Angle Torque Motor, which has six controllable thyristors. In this case, the reliability is improved and the cost is decreased.
- If the drive circuit adds two controllable thyristors, the closing circuit and opening circuit can realize the opening and closing of the circuit breaker with LSATPMM by sacrificing some performance, which improves the fault tolerance and the reliability of HVCB.
- The torque density of LSATPMM is higher, and thus the volume of HVCB is smaller.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Lin, X.; Wang, D.; Ma, Y. New Generation Linear Servo Motor Operating Mechanism for High-voltage Circuit Breaker. Electr. Age 2007, 2, 68–70. [Google Scholar]
- Yao, X.; Wang, J.; Geng, Y.; Yan, J.; Liu, Z.; Yao, J.; Liu, P. Development and Type Test of a Single-Break 126-kV/40-Ka-2500-A Vacuum Circuit Breaker. IEEE Trans. Power Deliv. 2016, 31, 182–190. [Google Scholar] [CrossRef]
- Li, Y. Research on Permanent Magnet Motor Operating Mechanism in 126 kv High Voltage Vacuum Circuit Breaker; Shenyang University of Technology: Shenyang, China, 2013. [Google Scholar]
- Meng, F.; Wu, S.; Hu, J.; Xiao, Y.; Jia, J.; Li, Q.; Shi, C. Simulation and stability analysis of spring operating mechanism with clearance for high voltage circuit breakers. In Proceedings of the 2016 China International Conference on Electricity Distribution (CICED), Xi’an, China, 10–13 August 2016. [Google Scholar] [CrossRef]
- Wen, W.; Huang, Y.; Al-Dweikat, M.; Zhang, Z.; Cheng, T.; Gao, S.; Liu, W. Research on Operating Mechanism for Ultra-Fast 40.5-kV Vacuum Switches. IEEE Trans. Power Deliv. 2015, 30, 2553–2560. [Google Scholar] [CrossRef]
- Li, W.; Ren, Z.Y.; Jeong, Y.W.; Koh, C.S. Optimal shape design of a thomson-coil actuator utilizing generalized topology optimization based on equivalent circuit method. IEEE Trans. Magn. 2011, 47, 1246–1249. [Google Scholar] [CrossRef]
- Bosma, A.; Koerber, F.-J.; Cameroni, R.; Thomas, R. Motor Drive with Electronic Control for HVAC Circuit-Breakers; CIGRE Session: Paris, France, 2002; pp. 13–203. ISSN 09135685. [Google Scholar]
- Braune, S.; Liu, S.; Mercorelli, P. Design and control of an electromagnetic valve actuator. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; pp. 1657–1662. [Google Scholar] [CrossRef]
- Seung, L.; Yi, H.; Han, H.C.; Kim, K.; Ho, J. Genetic Algorithm-Based Design Optimization of Electromagnetic Valve Actuators in Combustion Engines. Energies 2015, 8, 13222–13230. [Google Scholar] [CrossRef] [Green Version]
- Bosma, A.; Thureson, P.-O. A new reliable operating mechanism for HVAC circuit-breakers. In Proceedings of the 2001 IEEE/PES Transmission and Distribution Conference and Exposition, Atlanta, GA, USA, 2 November 2001; Volume 2, pp. 573–577. [Google Scholar] [CrossRef]
- Bosma, A.; Cameroni, R.; Blundell, M. Introducing a new generation of operating mechanism for high voltage AC circuit-breakers. J. Electr. Electron. Eng. 2002, 21, 233–240. [Google Scholar]
- Singh, V.P.; Kishor, N.; Samuel, P. Distributed Multi-Agent System-Based Load Frequency Control for Multi-Area Power System in Smart Grid. IEEE Trans. Ind. Electron. 2017, 64, 5151–5160. [Google Scholar] [CrossRef]
- Baronti, F.; Vazquez, S.; Chow, M.Y. Modeling, Control, and Integration of Energy Storage Systems in E-Transportation and Smart Grid. IEEE Trans. Ind. Electron. 2018, 65, 6548–6551. [Google Scholar] [CrossRef]
- Meng, W.; Wang, X. Distributed Energy Management in Smart Grid With Wind Power and Temporally Coupled Constraints. IEEE Trans. Ind. Electron. 2017, 64, 6052–6062. [Google Scholar] [CrossRef]
- Huang, Y.; Wang, J.; Zhang, W.; Al-Dweikat, M.; Li, D.; Yang, T.; Shao, S. A Motor-Drive-Based Operating Mechanism for High-Voltage Circuit Breaker. IEEE Trans. Power Deliv. 2013, 28, 2602–2609. [Google Scholar] [CrossRef]
- Fang, S.; Lin, H.; Yang, C.; Liu, X.; Guo, J. Agnetic field analysis and control strategy of permanent magnet actuator for low voltage vacuum circuit breaker. In Proceedings of the 2007 7th International Conference on Power Electronics and Drive Systems, Bangkok, Thailand, 27–30 November 2007; Volume 7, pp. 540–543. [Google Scholar] [CrossRef]
- Shao, S.N.; Huang, Y.; Wang, J.J.; Xu, G.Z.; Qian, J.L. Motor Drive Mechanism of High-voltage Circuit Breaker. High Volt. Eng. 2008, 34, 555–559. (In Chinese) [Google Scholar] [CrossRef]
- Li, X.; Wang, X.; Yin, N.; Gao, Q.; Miao, S.; Shan, C.; Huang, X. Simulation on failure analysis of vacuum circuit breaker permanent magnet operating mechanism based on three-parameter method. In Proceedings of the 2016 IEEE International Conference on Power System Technology (POWERCON), Wollongong, Australia, 28 September–1 October 2016; pp. 1–6. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, J.; Lou, J.; Bi, Y. Design and analysis of salient pole rotor coil excitation brushless DC motor using in high voltage circuit breaker operating mechanism. In Proceedings of the 2015 3rd International Conference on Electric Power Equipment-Switching Technology (ICEPE-ST), Busan, Korea, 25–28 October 2015; pp. 177–181. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, J.; Lou, J.; Bi, Y. Research on the control method of salient pole rotor brushless motor operating mechanism of high voltage circuit breaker. In Proceedings of the 2015 3rd International Conference on Electric Power Equipment-Switching Technology (ICEPE-ST), Busan, Korea, 25–28 October 2015; pp. 166–171. [Google Scholar] [CrossRef]
- Liu, A.; Zhang, J.; Ming, Z.; Peng, S. Research and application of novel switch reluctance motor operating mechanism used in 40.5 kV HV circuit breaker. In Proceedings of the 2017 IEEE Power and Energy Conference at Illinois (PECI), Champaign, IL, USA, 23–24 February 2017; pp. 1–6. [Google Scholar] [CrossRef]
- Li, Y.X.; Wang, T.Z.; Yu, H.; Jin, T. Research on segment adjustment permanent magnet motor operating mechanism in motion process of high voltage circuit breaker. In Proceedings of the 2016 IEEE International Conference on Information and Automation (ICIA), Ningbo, China, 1–3 August 2016; pp. 140–143. [Google Scholar] [CrossRef]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines; Wiley: Hoboken, NJ, USA, 2013; ISBN 978-7-121-17114-7. [Google Scholar]
- Li, Y.; Lin, X.; Xu, J. Two Stator Structures of Limited Angle Permanent Magnet Motors for Operating Mechanism on High Voltage Circuit Breaker. Trans. China Electrotech. Soc. 2010, 25, 61–68. [Google Scholar] [CrossRef]
- Wu, S.; Zhao, X.; Jiao, Z.; Luk, P.C.; Jiu, C. Multi-Objective Optimal Design of a Toroidally Wound Radial-Flux Halbach Permanent Magnet Array Limited Angle Torque Motor. IEEE Trans. Ind. Electron. 2017, 64, 2962–2971. [Google Scholar] [CrossRef]
- Zou, J.B.; Yu, G.D.; Xu, Y.X.; Li, J.L.; Wang, Q. Design and analysis of a permanent magnet slotted limited-angle torque motor with special tooth-tip structure for torque performance improvement. In Proceedings of the 2015 IEEE International Conference on Applied Superconductivity and Electromagnetic Devices (ASEMD), Shanghai, China, 20–23 November 2015; pp. 246–247. [Google Scholar] [CrossRef]
- Nasiri-Zarandi, R.; Mirsalim, M.; Cavagnino, A. Analysis, Optimization, and Prototyping of a Brushless DC Limited-Angle Torque-Motor With Segmented Rotor Pole Tip Structure. IEEE Trans. Ind. Electron. 2015, 62, 4985–4993. [Google Scholar] [CrossRef]
- Lin, X.; Li, Y.; Yang, C.; Xu, J.; Liu, A. Design and dynamic simulation of permanent magnet motor actuator on high voltage circuit breaker. In Proceedings of the 2009 IEEE International Conference on Automation and Logistics, Shenyang, China, 5–7 August 2009; pp. 181–185. [Google Scholar] [CrossRef]
- Yu, G.; Xu, Y.; Zou, J.; Wang, G. Analysis and Experimental Validation of Dynamic Performance for Slotted Limited-Angle Torque Motor. IEEE Trans. Magn. 2017, 53. [Google Scholar] [CrossRef]
- Hekmati, P.; Yazdanpanah, R.; Mirsalim, M.; Ghaemi, E. Radial-Flux Permanent-Magnet Limited-Angle Torque Motors. IEEE Trans. Ind. Electron. 2017, 64, 1884–1892. [Google Scholar] [CrossRef]
- Wu, S.; Zhao, X.; Li, X.; Luk, P.C.K.; Jiao, Z. Preliminary Design and Optimization of Toroidally Wound Limited Angle Servo Motor Based on a Generalized Magnetic Circuit Model. IEEE Trans. Magn. 2016, 52. [Google Scholar] [CrossRef]
- Lee, E.; Kwon, S.; Lee, H.; Jang, S.; Hong, J. Effects of rotor pole angle on torque characteristics of a limited-angle torque motor. In Proceedings of the 2017 IEEE International Electric Machines and Drives Conference (IEMDC), Miami, FL, USA, 21–24 May 2017. [Google Scholar] [CrossRef]
- Lee, C.H.; Shin, B.H.; Bang, Y.B. Designing a Permanent-Magnetic Actuator for Vacuum Circuit Breakers Using the Taguchi Method and Dynamic Characteristic Analysis. IEEE Trans. Ind. Electron. 2016, 63, 1655–1664. [Google Scholar] [CrossRef]
- Wang, Z.; Sun, L.; He, S.; Geng, Y.; Liu, Z. A Permanent Magnetic Actuator for 126 kV Vacuum Circuit Breakers. IEEE Trans. Magn. 2014, 50, 129–135. [Google Scholar] [CrossRef]
- Ro, J.S.; Hong, S.K.; Jung, H.K. Characteristic analysis and design of a novel permanent magnetic actuator for a vacuum circuit breaker. IET Electr. Power Appl. 2013, 7, 87–96. [Google Scholar] [CrossRef]
- Lin, H.; Wang, X.; Fang, S.; Jin, P.; Ho, S.L. Design, Optimization, and Intelligent Control of Permanent-Magnet Contactor. IEEE Trans. Ind. Electron. 2013, 60, 5148–5159. [Google Scholar] [CrossRef]
- Vilchis-Rodriguez, D.S.; Shuttleworth, R.; Barnes, M. Modelling Thomson Coils With Axis-Symmetric Problems: Practical Accuracy Considerations. IEEE Trans. Energy Convers. 2017, 32, 629–639. [Google Scholar] [CrossRef] [Green Version]
- Lim, D.K.; Woo, D.K.; Kim, I.W.; Shin, D.K.; Ro, J.S.; Chung, T.K.; Jung, H.K. Characteristic Analysis and Design of a Thomson Coil Actuator Using an Analytic Method and a Numerical Method. IEEE Trans. Magn. 2013, 49, 5749–5755. [Google Scholar] [CrossRef]
- Lin, X.; Ma, Y.; Xu, J.; Wang, D. Design and analysis of novel operating mechanism drive motor for high voltage circuit breaker. J. Shenyang Univ. Technol. 2008, 30, 129–133. [Google Scholar]
- Lin, X.; Li, Y.; Ma, Y.; Wu, G. Dynamic characteristics analysis on novel motor actuator of high voltage circuit breaker. Electr. Mach. Control 2009, 13, 216–226. [Google Scholar]
- Tang, Y. Electro Mechanics, 4th ed.; China Machine Press: Beijing, China, 2013; ISBN 978-7-111-34138-3. [Google Scholar]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Parameter | Machines 1 | Machines 2 | Machines 3 |
|---|---|---|---|
| Number of Stator Slots | 36 | 12 | 36 |
| Outer Diameter of Stator (mm) | 170 | 170 | 170 |
| Inner Diameter of Stator (mm) | 106 | 106 | 20 |
| Number of pole pairs | 2 | 2 | 2 |
| Air Gap (mm) | 1 | 1 | 1 |
| Outer Diameter of rotor (mm) | 104 | 104 | 170 |
| Inner Diameter of rotor (mm) | 44 | 44 | 120 |
| Length of Rotor (mm) | 212 | 212 | 212 |
| Pole embrace | 0.8 | 0.8 | 0.8 |
| Magnet Thickness (mm) | 10 | 10 | 10 |
| Number of per slot of coil | 20 | 20 | 20 |
| Design Parameter | Value |
|---|---|
| Number of Stator Slots | 36 |
| Outer Diameter of Stator (mm) | 148 |
| Inner Diameter of Stator (mm) | 20 |
| Number of Pole Pairs | 2 |
| Air Gap (mm) | 1 |
| Outer Diameter of Rotor (mm) | 200 |
| Inner Diameter of Rotor (mm) | 150 |
| Length of Rotor (mm) | 250 |
| Pole Embrace | 0.8 |
| Magnet Thickness (mm) | 10 |
| Number Coil of per Slot | 20 |
| Design Parameter | A | B | C |
|---|---|---|---|
| reference | more than 0.77 m/s | more than 1.31 m/s | less than 1.31 m/s |
| [3] | 1.31147541 | 2.564102564 | 0.916030534 |
| [4] | 1.398601399 | 2.739726027 | 0.956175299 |
| [5] | 1.413427562 | 2.898550725 | 0.987654321 |
| [6] | 1.423487544 | 2.777777778 | 1.012658228 |
| [7] | 1.418439716 | 2.777777778 | 1.061946903 |
| [9] | 1.47601476 | 3.03030303 | 0.987654321 |
| [10] | 1.413427562 | 3.076923077 | 1.304347826 |
| Design Parameter | Value |
|---|---|
| Number of Stator Slots | 20 |
| Outer Diameter of Stator (mm) | 80 |
| Inner Diameter of Stator (mm) | 38 |
| Number of Pole Pairs | 2 |
| Air Gap (mm) | 1 |
| Outer Diameter of Rotor (mm) | 108 |
| Inner Diameter of Rotor (mm) | 82 |
| Length of Rotor (mm) | 52 |
| Pole Embrace | 0.8 |
| Number coil of per Slot | 40 |
| Magnet Thickness (mm) | 8 |
| Rated Voltage (v) | 36 |
| Continuously Working Current (A) | 16 |
| Rated Power (W) | 360 |
| Rated Torque (N·m) | 3.5 |
| Rated Speed (rpm) | 1000 |
| Resistance (ohm) | 0.9 |
| Average Mutual Inductance (mH) | 0.288 |
| Average Self Inductance (mH) | 1.9043 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zeng, G.; Yang, X.; Zhao, S.; Yin, H.; Pei, Y.; Cao, J. Analysis, Design and Dynamic Simulation of Novel Limited Swing Angle Torque Permanent Magnet Motor for High Voltage Circuit Breaker Application. Energies 2018, 11, 2652. https://doi.org/10.3390/en11102652
Zeng G, Yang X, Zhao S, Yin H, Pei Y, Cao J. Analysis, Design and Dynamic Simulation of Novel Limited Swing Angle Torque Permanent Magnet Motor for High Voltage Circuit Breaker Application. Energies. 2018; 11(10):2652. https://doi.org/10.3390/en11102652
Chicago/Turabian StyleZeng, Guanbao, Xiangyu Yang, Shiwei Zhao, Huajie Yin, Yunqing Pei, and Jianghua Cao. 2018. "Analysis, Design and Dynamic Simulation of Novel Limited Swing Angle Torque Permanent Magnet Motor for High Voltage Circuit Breaker Application" Energies 11, no. 10: 2652. https://doi.org/10.3390/en11102652
APA StyleZeng, G., Yang, X., Zhao, S., Yin, H., Pei, Y., & Cao, J. (2018). Analysis, Design and Dynamic Simulation of Novel Limited Swing Angle Torque Permanent Magnet Motor for High Voltage Circuit Breaker Application. Energies, 11(10), 2652. https://doi.org/10.3390/en11102652