A Robust Current Controller for Uncertain Permanent Magnet Synchronous Motors with a Performance Recovery Property for Electric Power Steering Applications

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. System Description
2.1. PMSM Control Issues in the EPS System
2.2. PMSM Model in a Synchronous Rotating d-q Axis
3. Controller Design
3.1. Problem: PI-Decoupling Method and Drawbacks
3.2. Proposed Control Algorithm
3.3. Control Gain Design Method in the Frequency Domain
4. Simulation Study
4.1. Simulation Environments: Electric Power Steering (EPS) System
4.2. Simulation Case 1: Parameter Variations
4.3. Simulation Case 2: Speed Measurement Delay
5. Experimental Results
5.1. Experiment 1: Performance Recovery of the Proposed Method
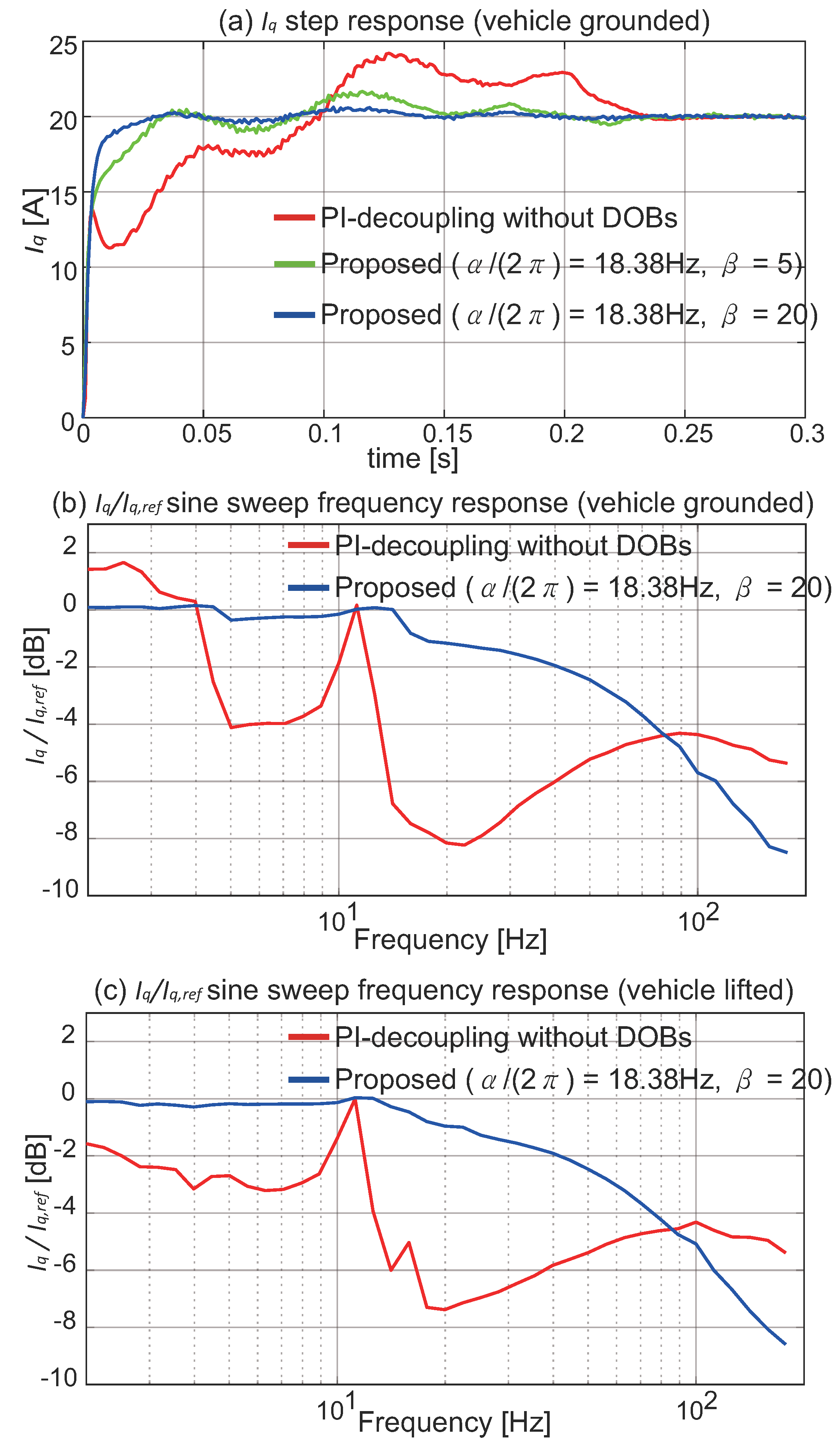
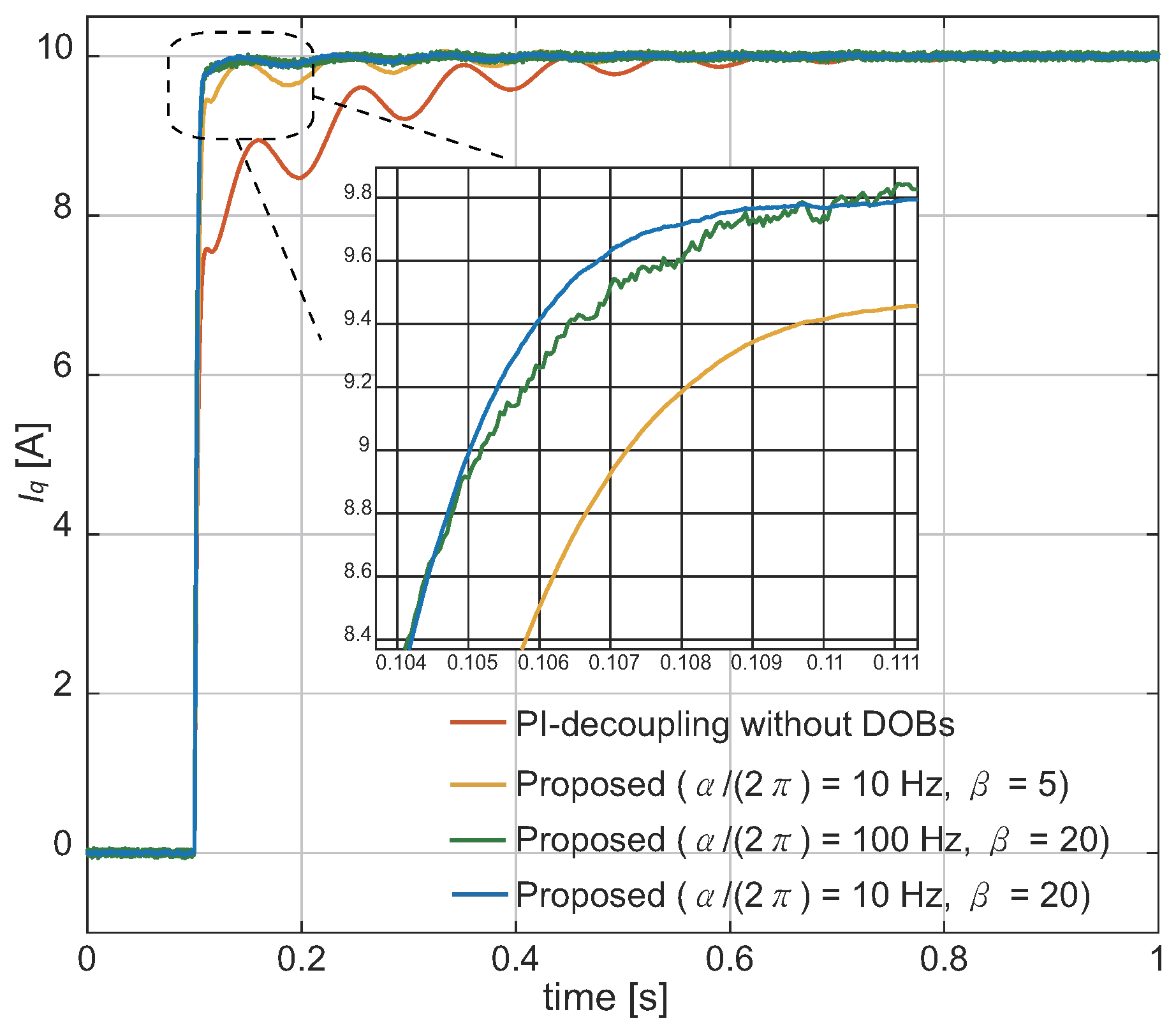
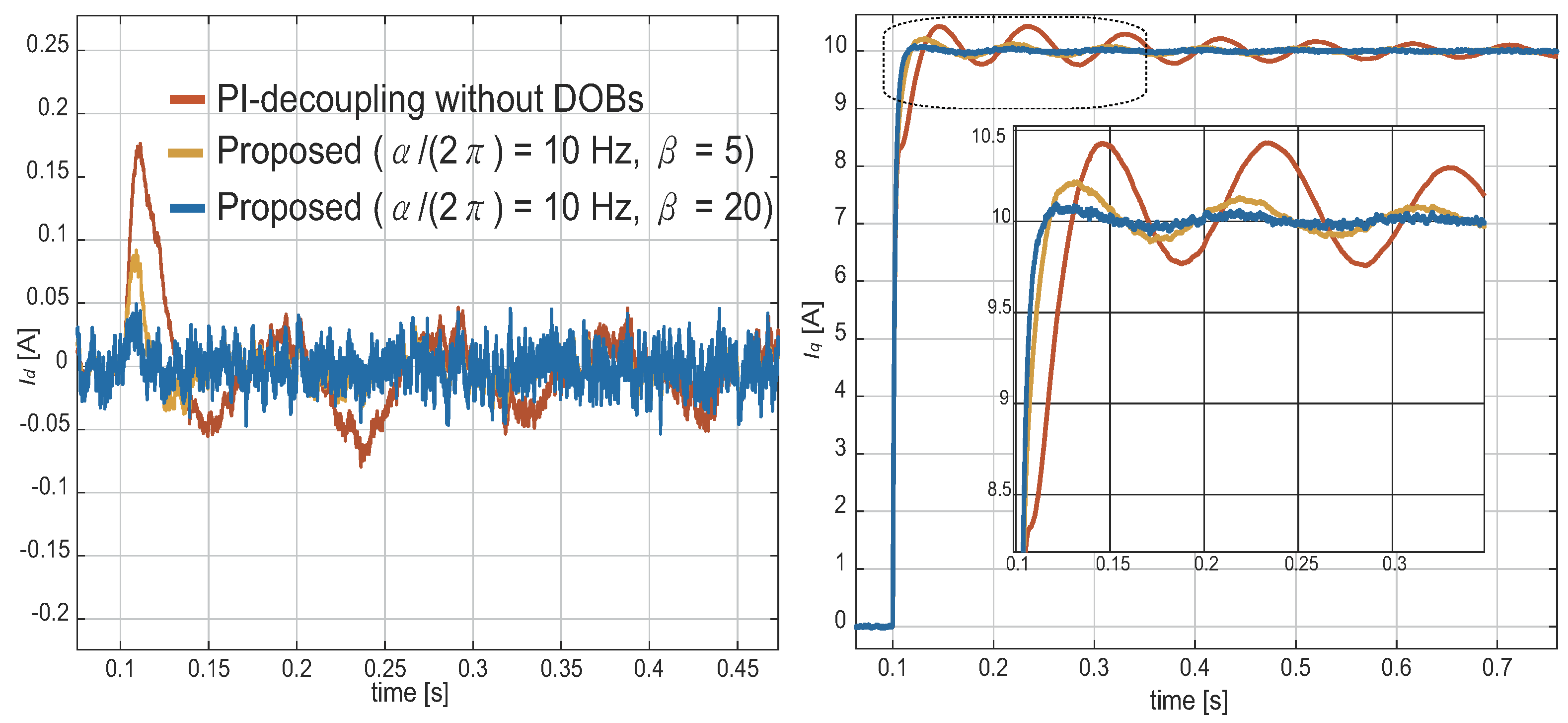
- Experiment 1.1 ( 20 A step reference input at t = 0 s):
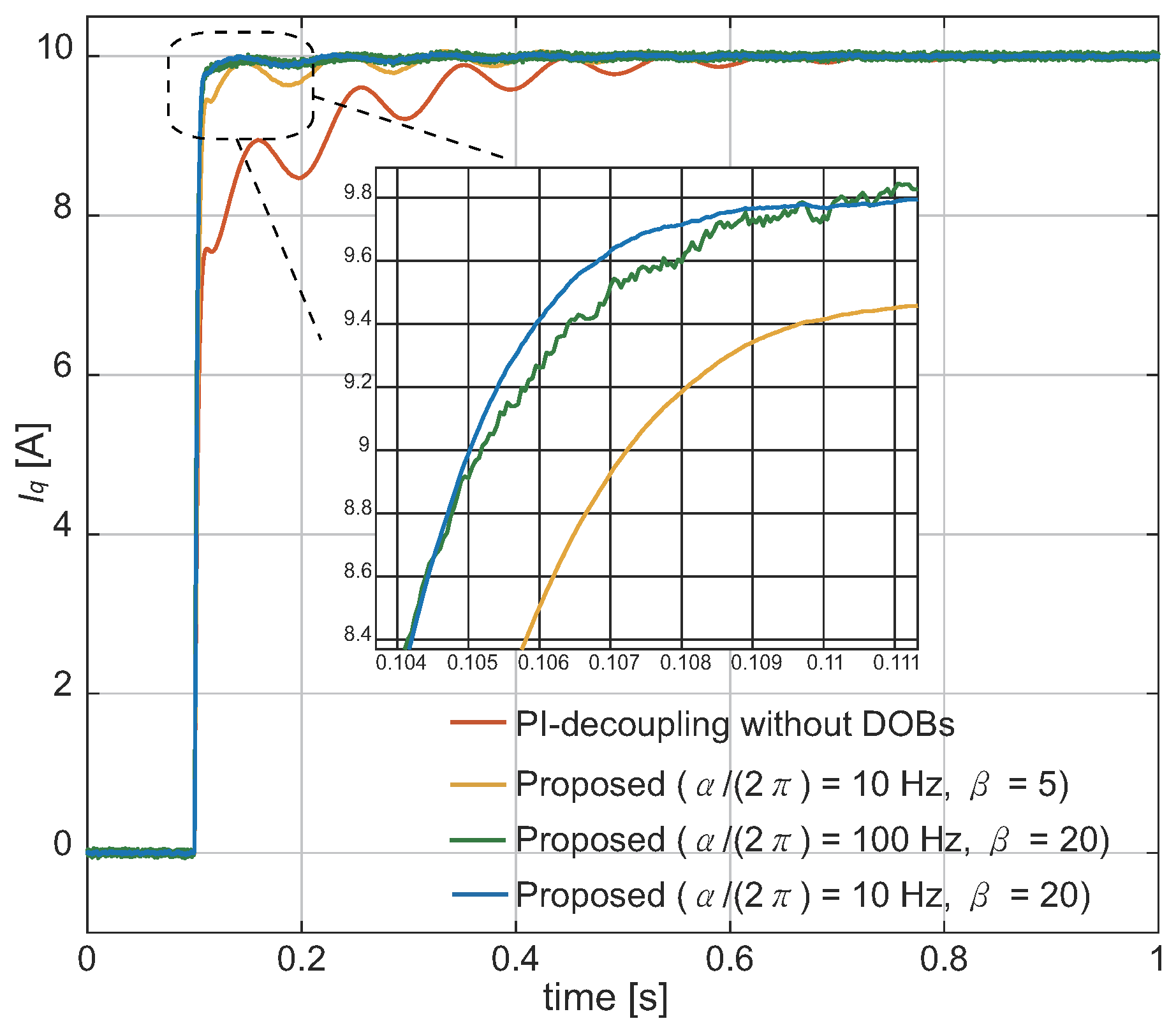
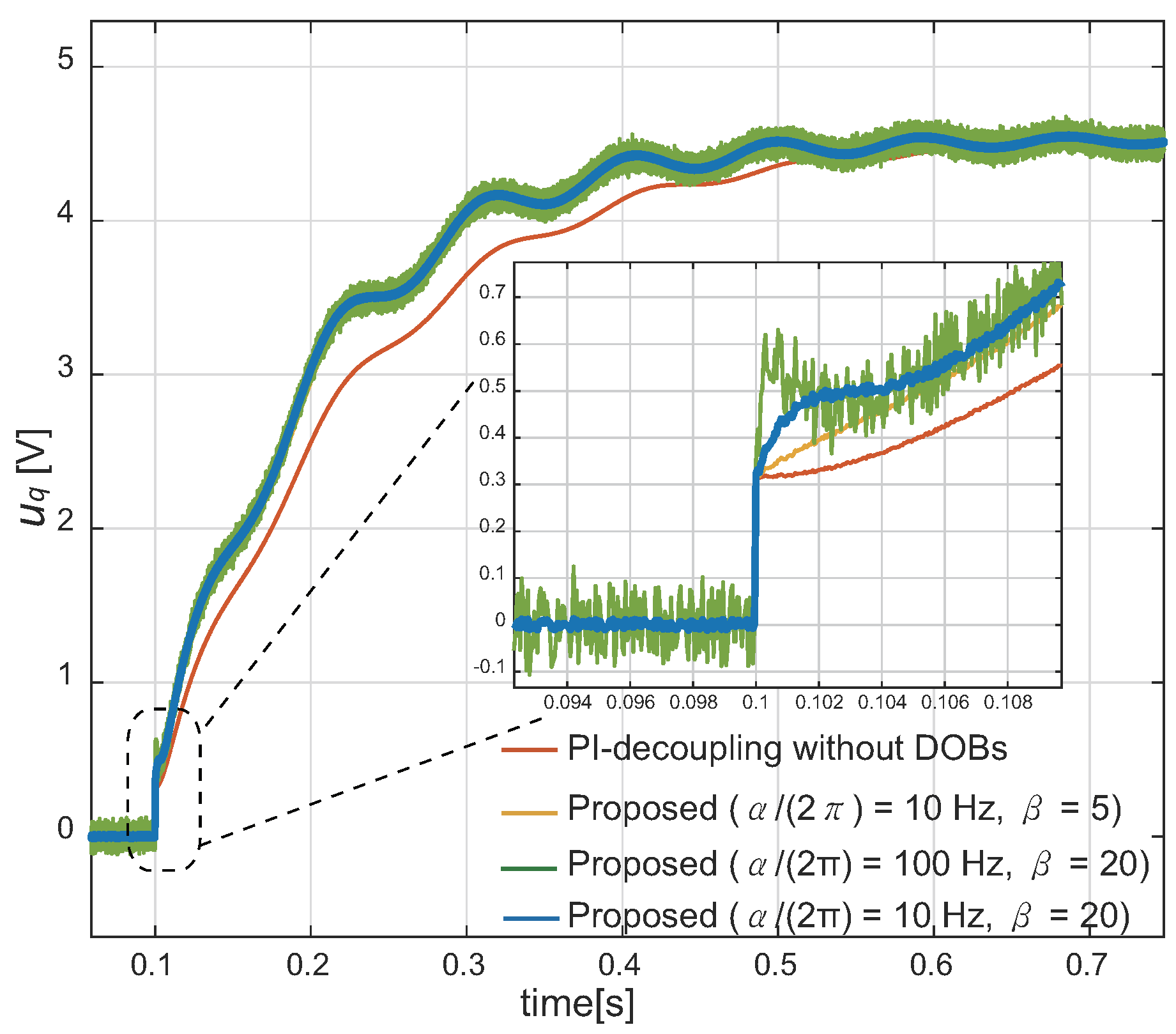
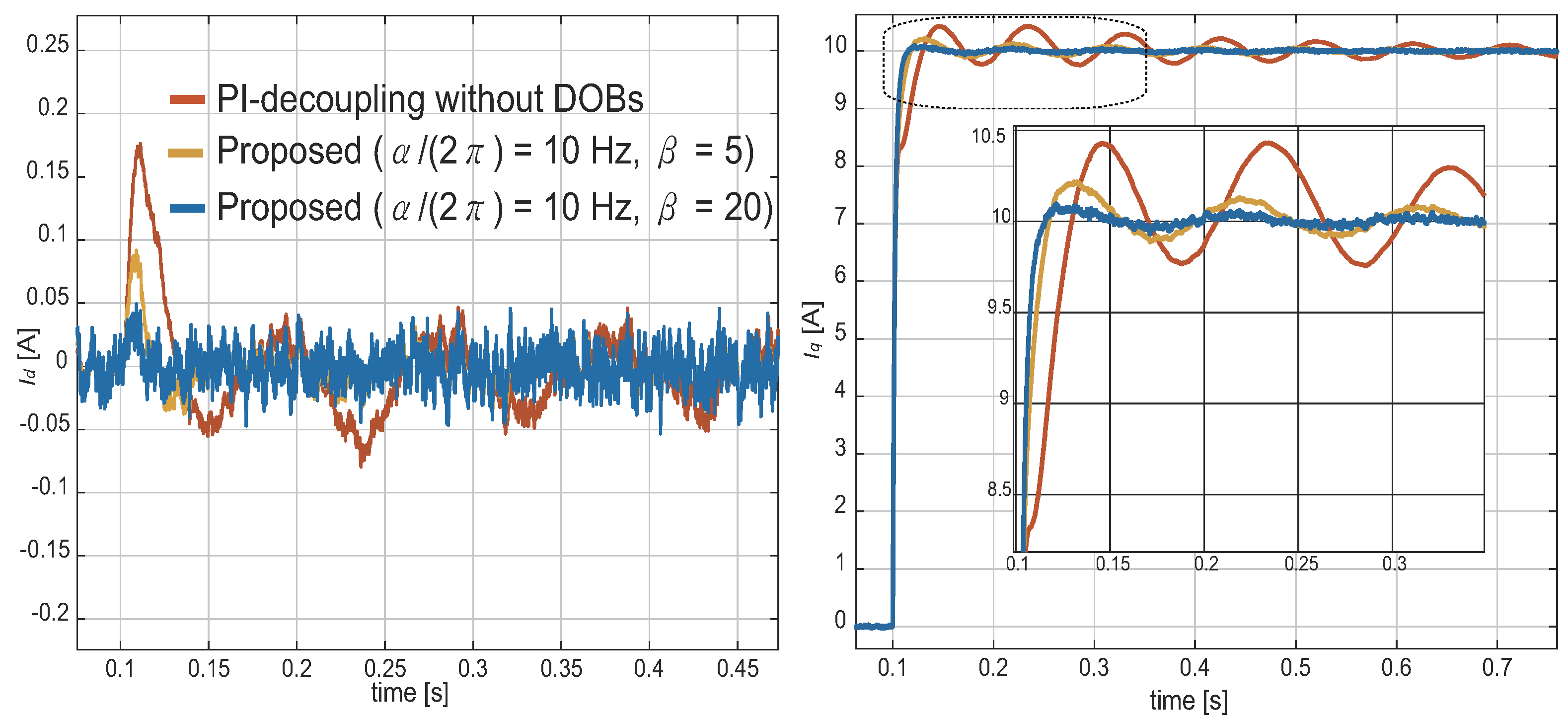
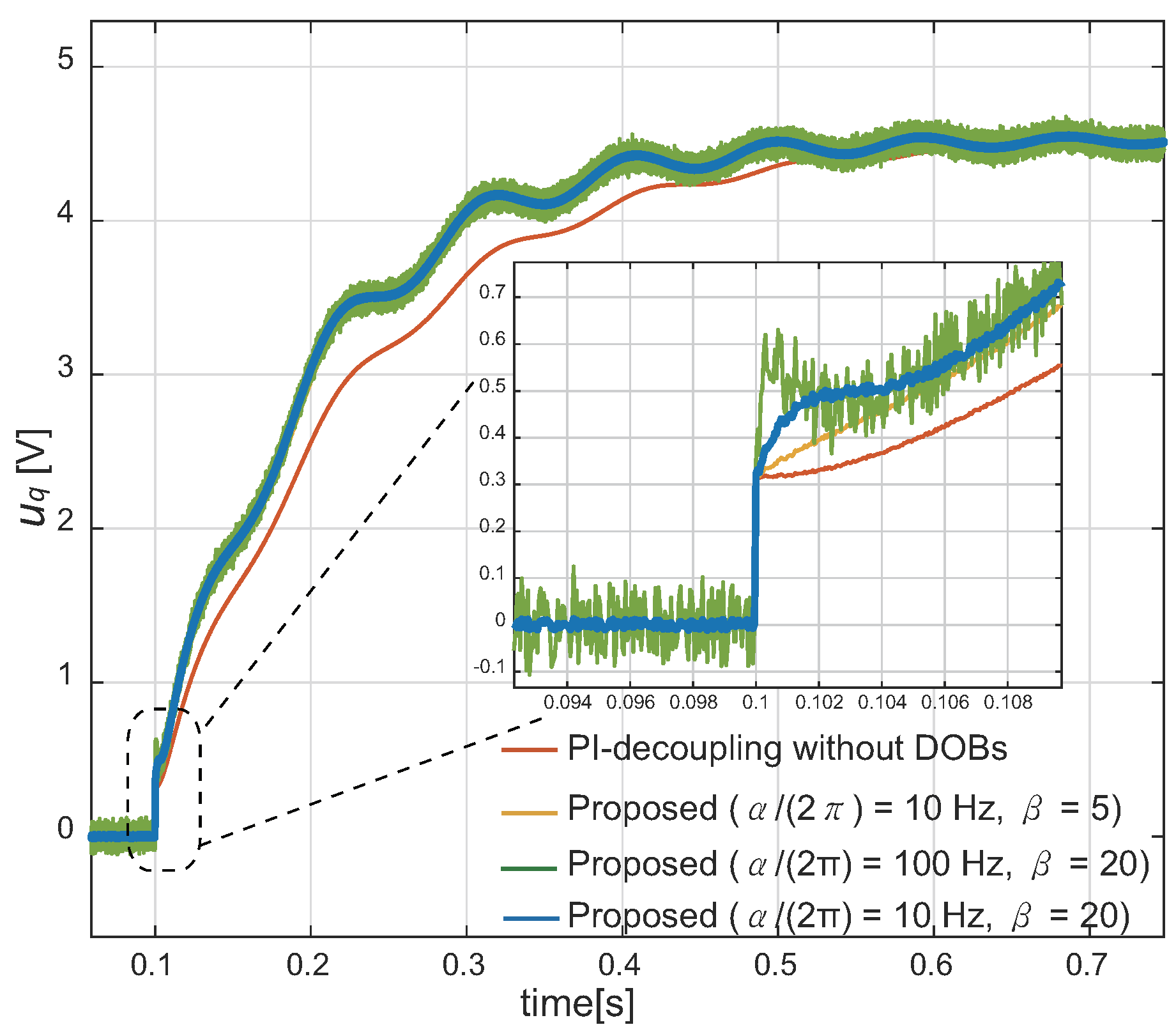
- In the first experiment, the test vehicle is on the ground, with high friction between the surface of the ground and the tyre. The result in Figure 13a indicates that an increase in the gain and appropriate effectively mitigate lumped disturbances and uncertainties, and the q-axis current recovers to the step response.
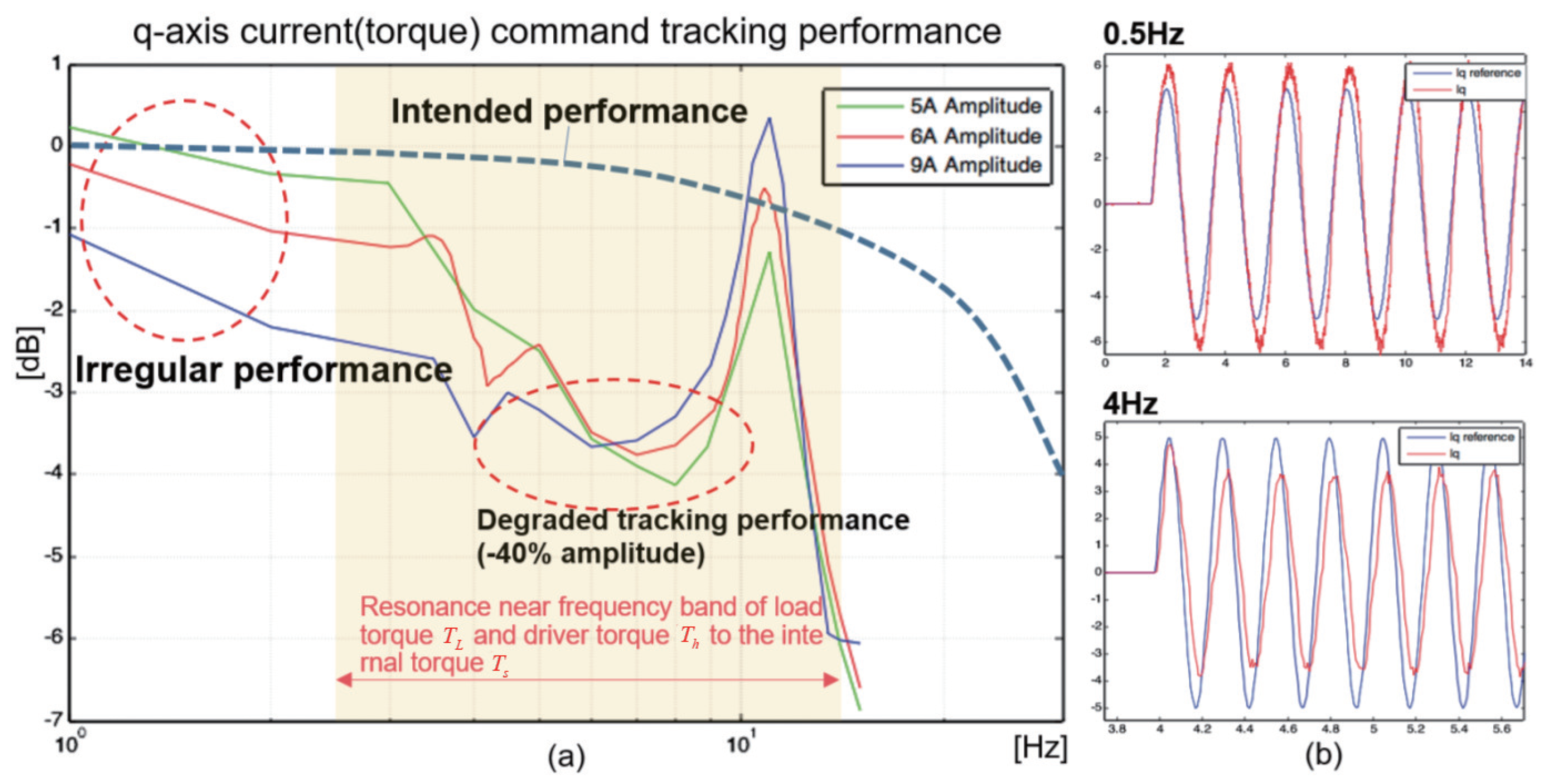
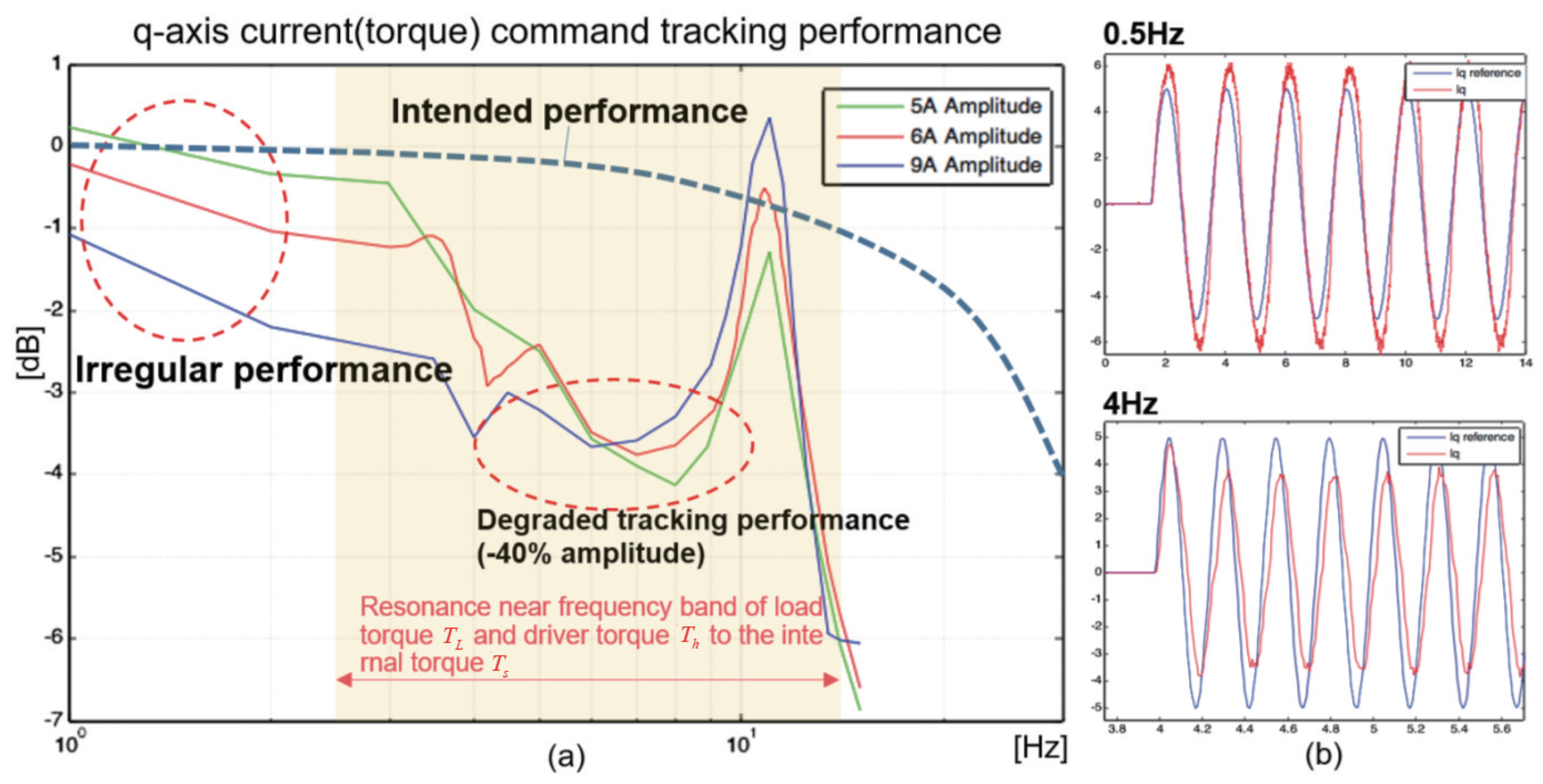
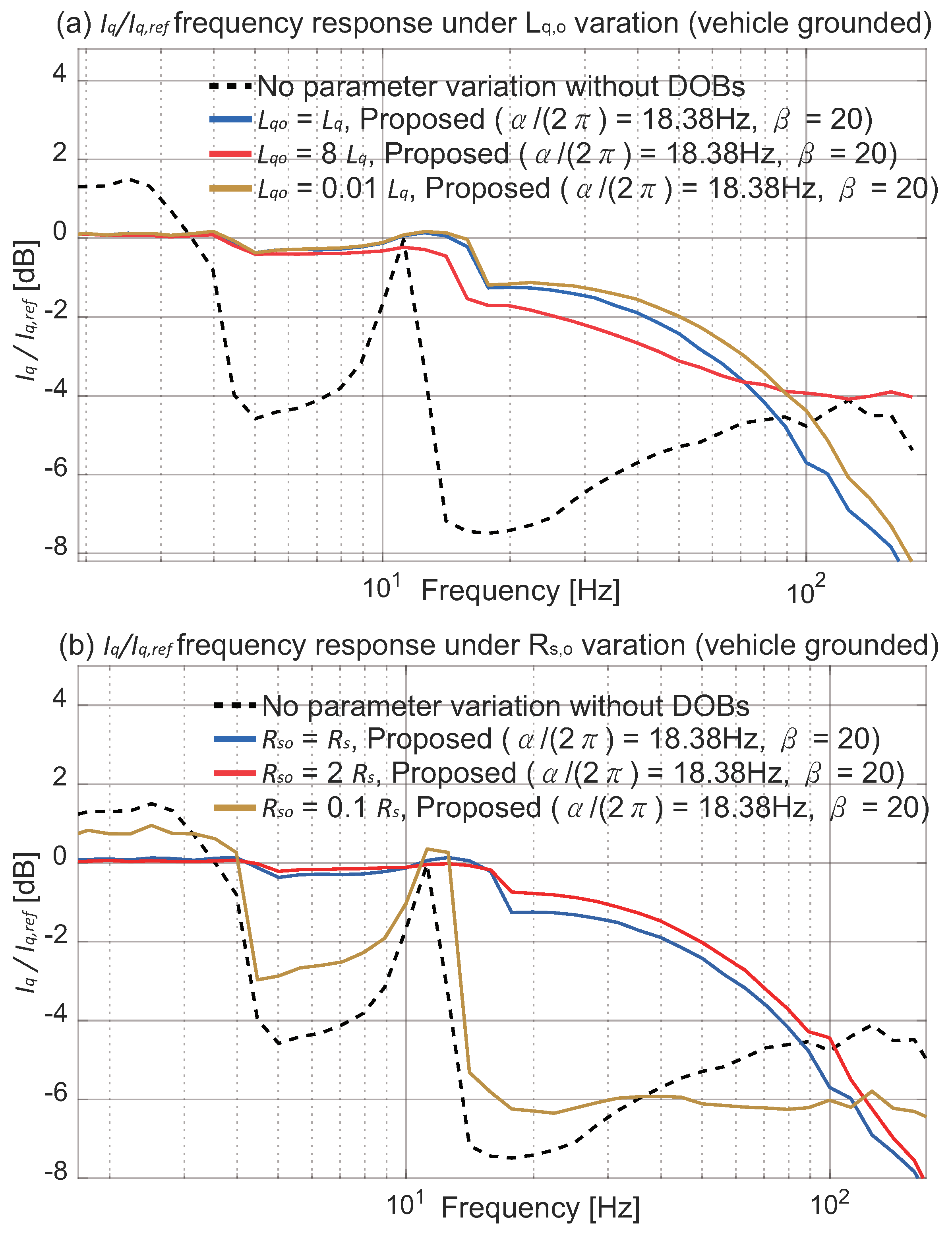
- Experiment 1.2 and 1.3 (the sine sweeps when the vehicle is on the ground and lifted, respectively):
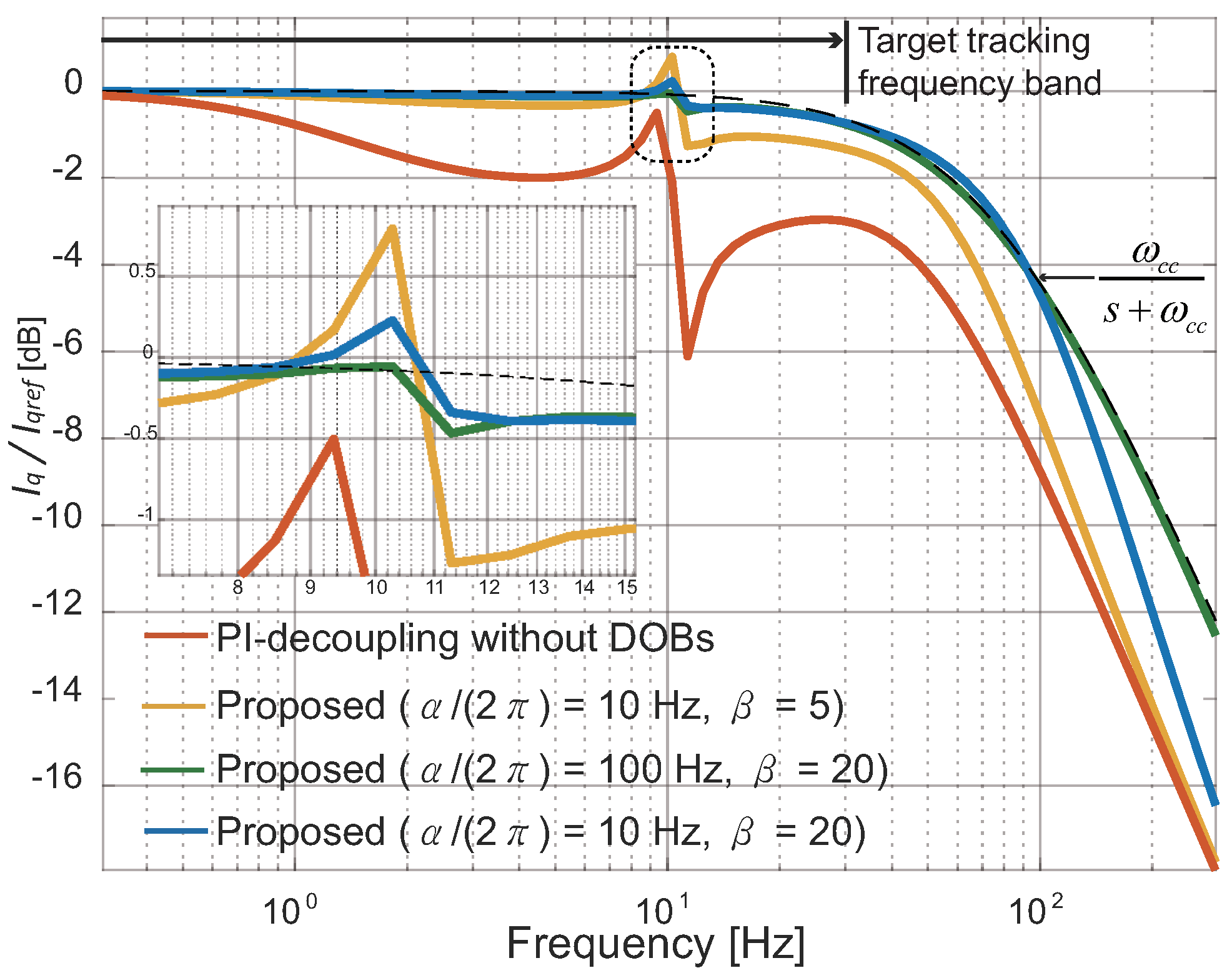
- The sine sweeps are conducted with a +/−10 A amplitude continuous sinusoidal signal on the q-axis current reference with a set of discrete frequencies varying from 0 to 150 Hz. Figure 13b,c display the frequency response of ; both the measured current and reference are filtered with a 10th-order 300 Hz cut-off finite impulse response (FIR) filter to reject the effects of high-frequency noise from the measurement. Figure 13b,c prove that the effects of the disturbances, including the back-EMF, are well mitigated compared to the classical FL method. The compensation results recover to the frequency shape of the first-order low-pass filter. The difference between Figure 13b,c arises from different torque loads from the surface friction between the tyre and floor.
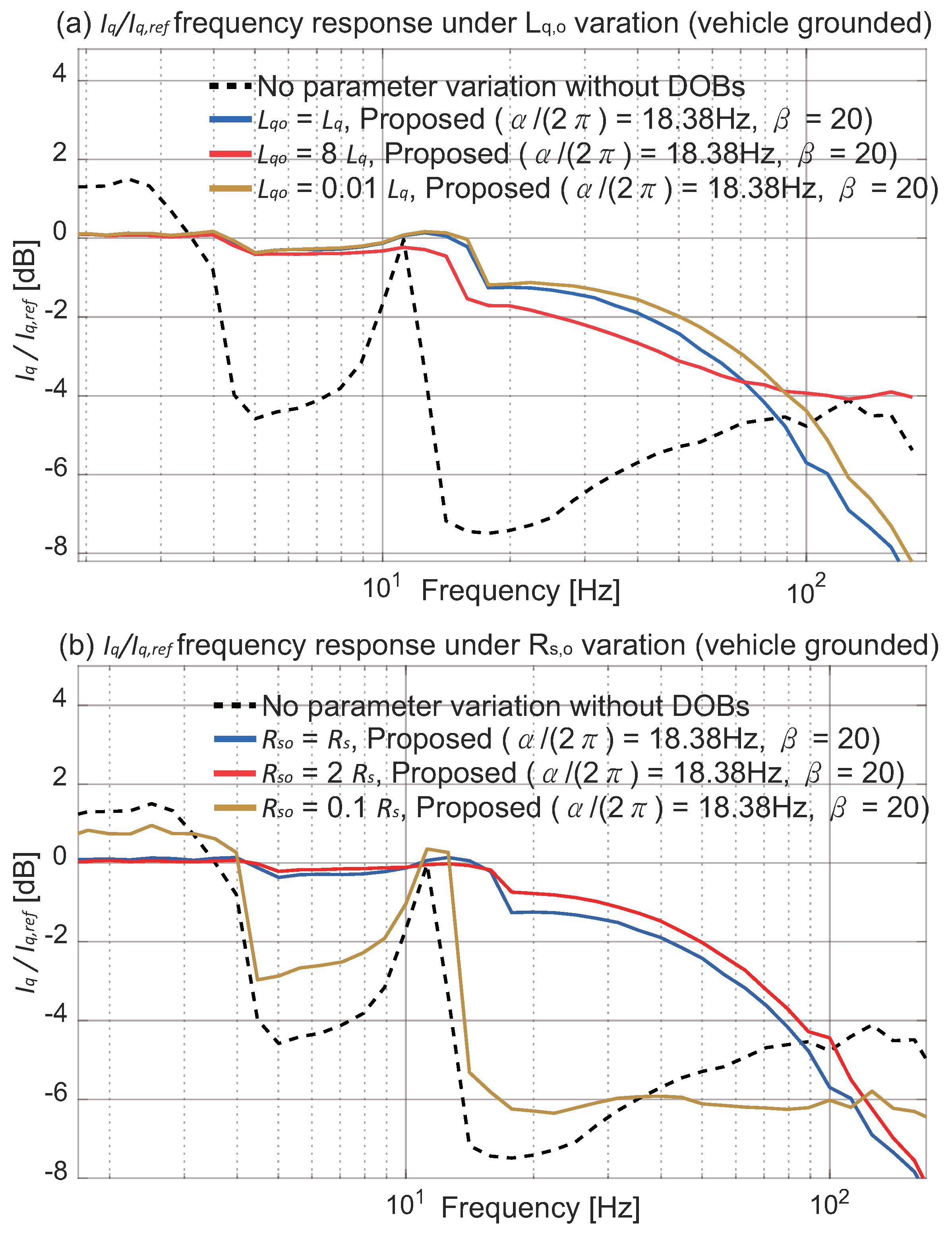
5.2. Experiment 2: Robust Stability to Parameter Variation
6. Conclusions
- We examine and raise the problem of basic FL control widely used in EPS systems.
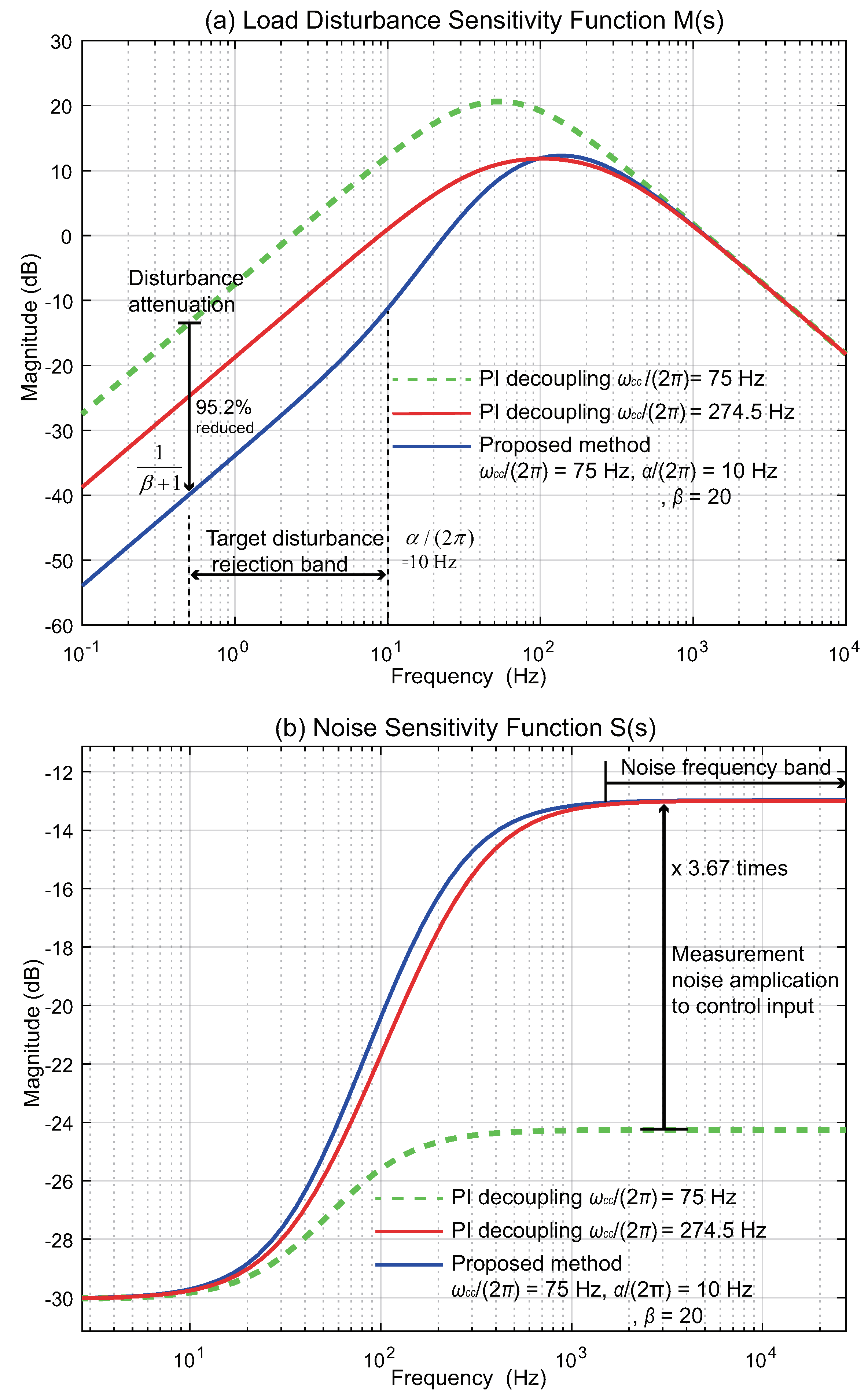
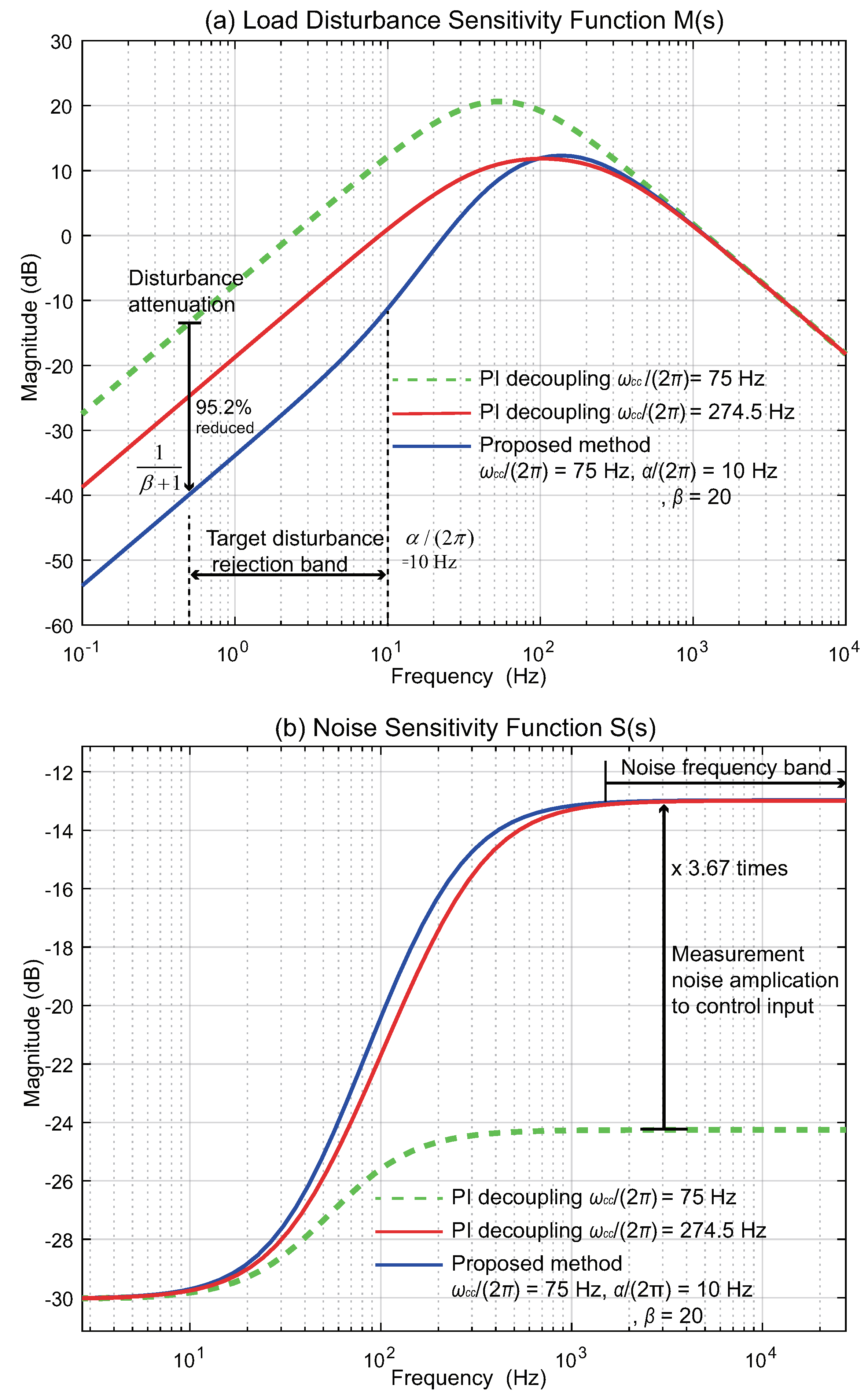
- To solve the problem, this paper proposed a disturbance-observer-based current controller. The structure of the proposed controller is easy to design and has minimal influence on noise while greatly suppressing disturbances below 20 Hz from external load torques.
- In an actual mechanical EPS system in a vehicle, the performance around the resonance point was recovered, and the robustness was proved in both simulations and experiments.
7. Patents
Author Contributions
Acknowledgments
Conflicts of Interest
Abbreviations
| PMSM | Permanent Magnet Synchronous Motor |
| DOB | Disturbance Observer |
| EPS | Electric Power Steering |
| DTC | Direct Torque Control |
| MPC | Model Predictive Control |
| IMC | Internal Model Control |
| FL | Feedback Linearization |
Appendix A. Transfer Functions of EPS Control System
References
- Cheng, M.; Sun, L.; Buja, G.; Song, L.; Zhou, K. Advanced electrical machines and machine-based systems for electric and hybrid vehicles. Energies 2015, 9, 9541–9564. [Google Scholar] [CrossRef]
- Lee, D.; Kim, K.S.; Kim, S. Controller design of an electric power steering system. IEEE Trans. Control Syst. Technol. 2017, 2, 748–755. [Google Scholar] [CrossRef]
- Chen, X.; Yang, T.; Chen, X.; Zhou, K. A generic model-based advanced control of electric power-assisted steering systems. IEEE Trans. Control Syst. Technol. 2008, 6, 1289–1300. [Google Scholar] [CrossRef]
- Marouf, A.; Djemai, M.; Sentouh, C.; Pudlo, P. A new control strategy of an electric-power-assisted steering system. IEEE Trans. Veh. Technol. 2012, 8, 3574–3589. [Google Scholar] [CrossRef]
- Hung, Y.C.; Lin, F.J.; Hwang, J.C.; Chang, J.K.; Ruan, K.C. Wavelet fuzzy neural network with asymmetric membership function controller for electric power steering system via improved differential evolution. IEEE Trans. Power Electron. 2015, 4, 2350–2362. [Google Scholar] [CrossRef]
- Sul, S.-K. Control of Electric Machine Drive Systems; John Wiley and Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Perez, J.H.; Hernandez, O.S.; Caporal, R.M.; de JR Magdaleno, J.; Barreto, H.P. Parameter Identification of a Permanent Magnet Synchronous Machine based on Current Decay Test and Particle Swarm Optimization. IEEE Latin Am. Trans. 2013, 5, 1176–1181. [Google Scholar] [CrossRef]
- Gan, C.; Wu, J.; Hu, Y.; Yang, S.; Cao, W.; Kirtley, J.L. Online sensorless position estimation for switched reluctance motors using one current sensor. IEEE Trans. Power Electron. 2016, 10, 7248–7263. [Google Scholar] [CrossRef]
- Zhao, L.; Huang, J.; Chen, J.; Ye, M. A parallel speed and rotor time constant identification scheme for indirect field oriented induction motor drives. IEEE Trans. Power Electron. 2016, 9, 6494–6503. [Google Scholar] [CrossRef]
- Utkin, V.; Guldner, J.; Shi, J. Sliding Mode Control in Electromechanical Systems; CRC Press: Boca Raton, FL, USA, 2017. [Google Scholar]
- Chang, S.H.; Chen, P.Y.; Ting, Y.H.; Hung, S.W. Robust current control-based sliding mode control with simple uncertainties estimation in permanent magnet synchronous motor drive systems. IET Electr. Power Appl. 2010, 6, 441–450. [Google Scholar] [CrossRef]
- Jezernik, K.; Korelič, J.; Horvat, R. PMSM sliding mode FPGA-based control for torque ripple reduction. IEEE Trans. Power Electron. 2013, 7, 3549–3556. [Google Scholar] [CrossRef]
- Repecho, V.; Biel, D.; Arias, A. Fixed Switching Period Discrete-Time Sliding Mode Current Control of a PMSM. IEEE Trans. Ind. Electron. 2018, 3, 2039–2048. [Google Scholar] [CrossRef]
- Zhong, L.; Rahman, M.F.; Hu, W.Y.; Lim, K.W. Analysis of direct torque control in permanent magnet synchronous motor drives. IEEE Trans. Power Electron. 1997, 3, 528–536. [Google Scholar] [CrossRef]
- Xia, C.; Zhao, J.; Yan, Y.; Shi, T. A novel direct torque control of matrix converter-fed PMSM drives using duty cycle control for torque ripple reduction. IEEE Trans. Ind. Electron. 2014, 6, 2700–2713. [Google Scholar] [CrossRef]
- Niu, F.; Wang, B.; Babel, A.S.; Li, K.; Strangas, E.G. Comparative evaluation of direct torque control strategies for permanent magnet synchronous machines. IEEE Trans. Power Electron. 2016, 2, 1408–1424. [Google Scholar] [CrossRef]
- Song, Q.; Li, Y.; Jia, C. A Novel Direct Torque Control Method Based on Asymmetric Boundary Layer Sliding Mode Control for PMSM. Energies 2018, 3, 657. [Google Scholar] [CrossRef]
- Geyer, T.; Papafotiou, G. Model predictive direct torque control—Part I: Concept, algorithm, and analysis. IEEE Trans. Ind. Electron. 2009, 6, 1894–1905. [Google Scholar] [CrossRef]
- Papafotiou, G.; Kley, J.; Papadopoulos, K.G.; Bohren, P.; Morari, M. Model predictive direct torque control-part II: implementation and experimental evaluation. IEEE Trans. Ind. Electron. 2009, 6, 1906–1915. [Google Scholar] [CrossRef]
- Yang, N.; Li, D.; Zhang, J.; Xi, Y. Model predictive controller design and implementation on FPGA with application to motor servo system. Control Eng. Pract. 2012, 11, 1229–1235. [Google Scholar] [CrossRef]
- Chai, S.; Wang, L.; Rogers, E. Model predictive control of a permanent magnet synchronous motor with experimental validation. Control Eng. Pract. 2013, 11, 1584–1593. [Google Scholar] [CrossRef]
- Jin, N.; Guo, L.; Yao, G. Model Predictive Direct Power Control for Nonredundant Fault Tolerant Grid-Connected Bidirectional Voltage Source Converter. Energies 2018, 8, 1133. [Google Scholar] [CrossRef]
- Harnefors, L.; Nee, H.P. Model-based current control of AC machines using the internal model control method. IEEE Trans. Ind. Appl. 1998, 1, 133–141. [Google Scholar] [CrossRef]
- Mohamed, Y.A.R.I. Design and implementation of a robust current-control scheme for a PMSM vector drive with a simple adaptive disturbance observer. IEEE Trans. Ind. Electron. 2007, 4, 1981–1988. [Google Scholar] [CrossRef]
- Briz, F.; Degner, M.W.; Lorenz, R.D. Analysis and design of current regulators using complex vectors. IEEE Trans. Ind. Appl. 2000, 3, 817–825. [Google Scholar] [CrossRef]
- Kim, H.; Degner, M.W.; Guerrero, J.M.; Briz, F.; Lorenz, R.D. Discrete-time current regulator design for AC machine drives. IEEE Trans. Ind. Appl. 2010, 4, 1425–1435. [Google Scholar]
- Ren, J.; Ye, Y.; Xu, G.; Zhao, Q.; Zhu, M. Uncertainty-and-disturbance-estimator-based current control scheme for PMSM drives with a simple parameter tuning algorithm. IEEE Trans. Power Electron. 2017, 7, 5712–5722. [Google Scholar] [CrossRef]
- Son, Y.I.; Kim, I.H.; Choi, D.S.; Shim, H. Robust cascade control of electric motor drives using dual reduced-order PI observer. IEEE Trans. Ind. Electron. 2015, 6, 3672–3682. [Google Scholar] [CrossRef]
- Jo, N.H.; Jeon, C.; Shim, H. Noise reduction disturbance observer for disturbance attenuation and noise suppression. IEEE Trans. Ind. Electron. 2017, 2, 1381–1391. [Google Scholar] [CrossRef]
- Chen, W.H.; Ballance, D.J.; Gawthrop, P.J.; O’Reilly, J. A nonlinear disturbance observer for robotic manipulators. IEEE Trans. Ind. Electron. 2000, 4, 932–938. [Google Scholar] [CrossRef] [Green Version]
- Kim, Y.; Kim, K.S.; Kim, S. A novel disturbance observer based robust current-control for a PMSM drive system. In Proceedings of the 2015 IEEE 54th Annual Conference on Decision and Control (CDC), Osaka, Japan, 15–18 December 2015; pp. 6043–6046. [Google Scholar]
- Kim, S.K. Proportional-type performance recovery current tracking control algorithm for PMSM. IET Electr. Power Appl. 2017. [Google Scholar] [CrossRef]
- Ozsoy, E.; Padmanaban, S.; Mihet-Popa, L.; Fedák, V.; Ahmad, F.; Akhtar, R.; Sabanovic, A. Control strategy for a grid-connected inverter under unbalanced network conditions—A disturbance observer-based decoupled current approach. Energies 2018, 7, 1067. [Google Scholar] [CrossRef]






© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Kim, Y.; Seo, H.-T.; Kim, S.-K.; Kim, K.-S. A Robust Current Controller for Uncertain Permanent Magnet Synchronous Motors with a Performance Recovery Property for Electric Power Steering Applications. Energies 2018, 11, 1224. https://doi.org/10.3390/en11051224
Kim Y, Seo H-T, Kim S-K, Kim K-S. A Robust Current Controller for Uncertain Permanent Magnet Synchronous Motors with a Performance Recovery Property for Electric Power Steering Applications. Energies. 2018; 11(5):1224. https://doi.org/10.3390/en11051224
Chicago/Turabian StyleKim, Yonghun, Hyung-Tae Seo, Seok-Kyoon Kim, and Kyung-Soo Kim. 2018. "A Robust Current Controller for Uncertain Permanent Magnet Synchronous Motors with a Performance Recovery Property for Electric Power Steering Applications" Energies 11, no. 5: 1224. https://doi.org/10.3390/en11051224