The Integrated Switching Control Strategy for Grid-Connected and Islanding Operation of Micro-Grid Inverters Based on a Virtual Synchronous Generator

Abstract
:1. Introduction
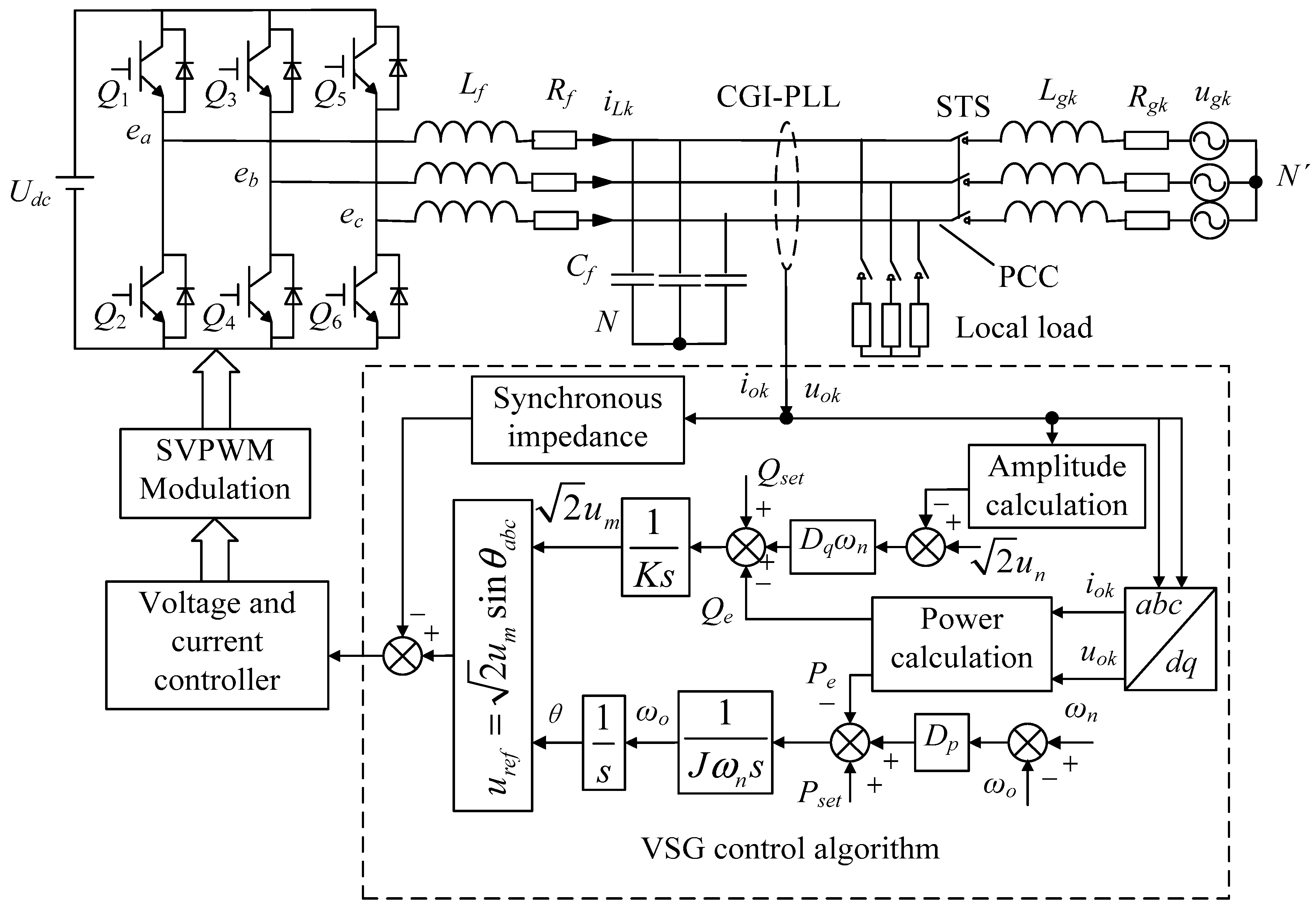
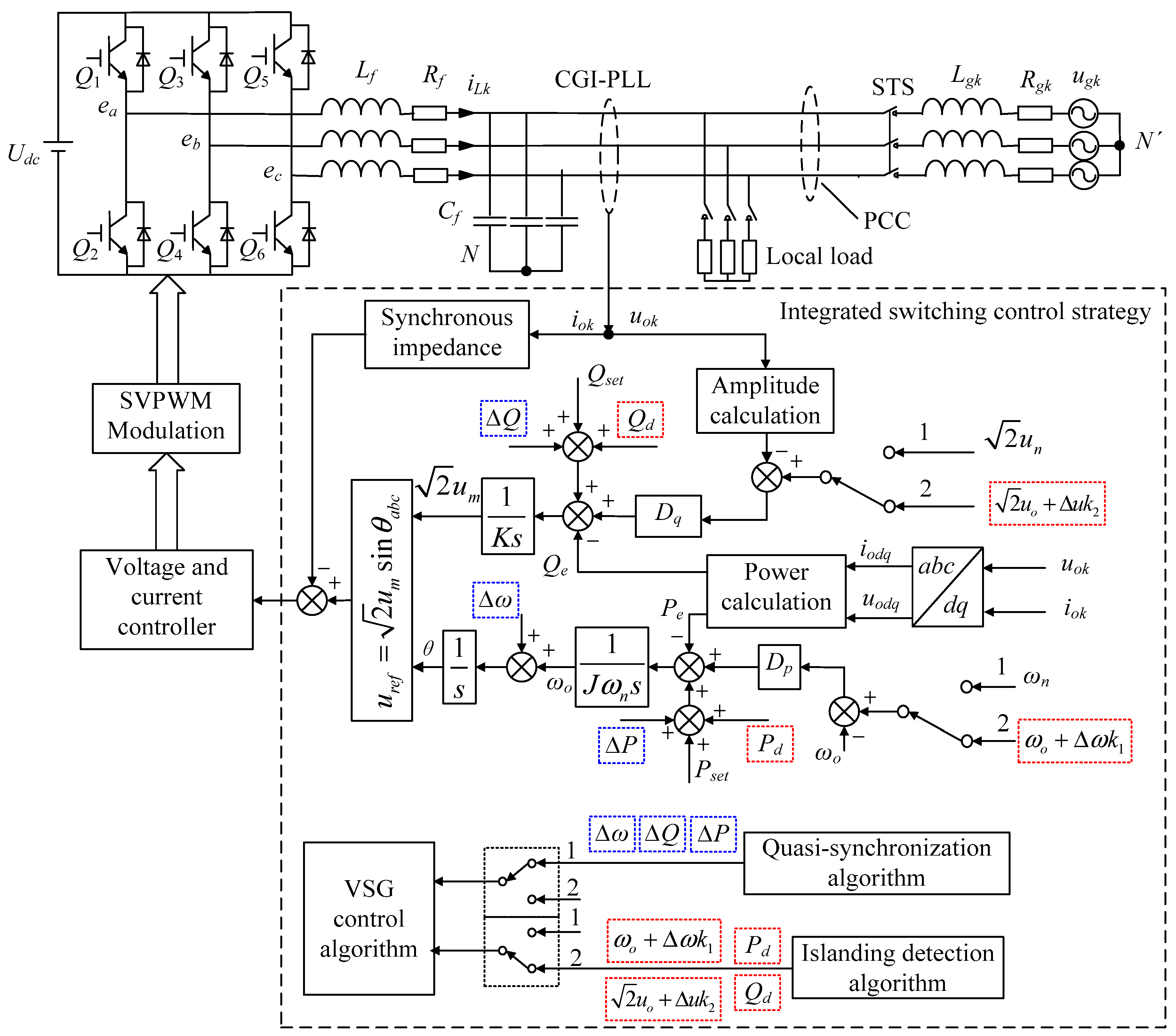
2. Structure and Control Strategy of Micro-Grid System
3. Integrated Control Strategy of Micro-Grid Systems
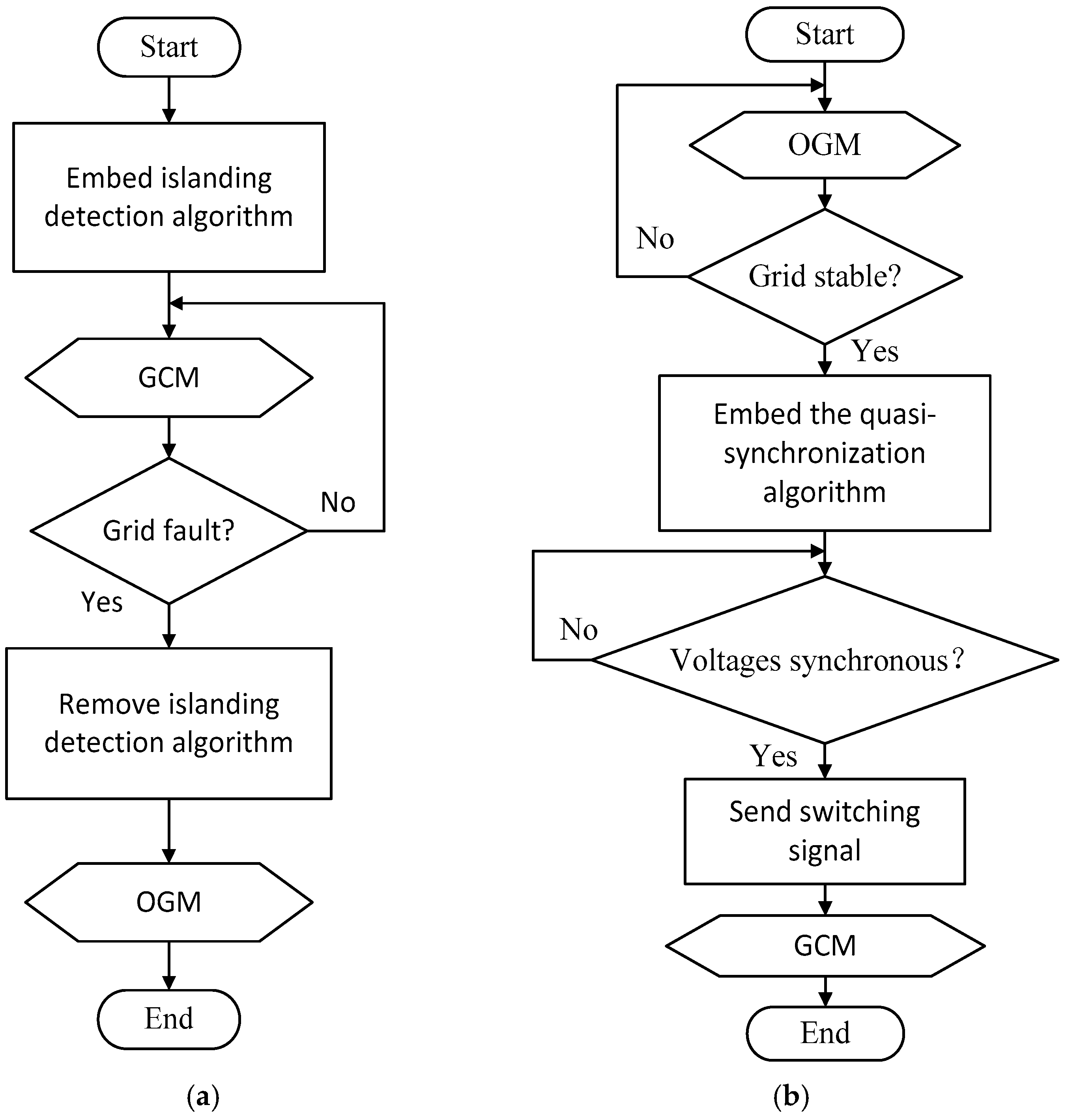
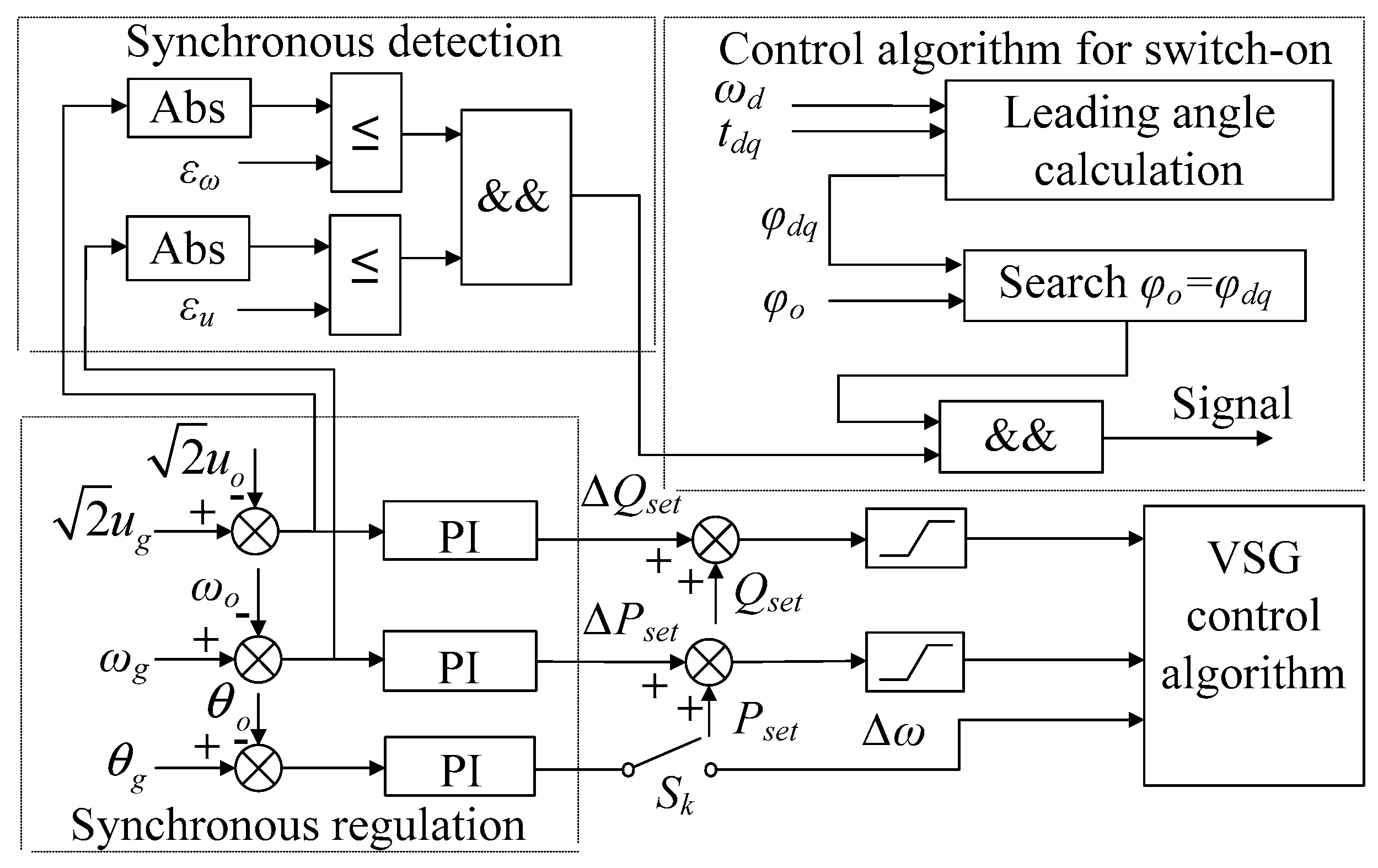
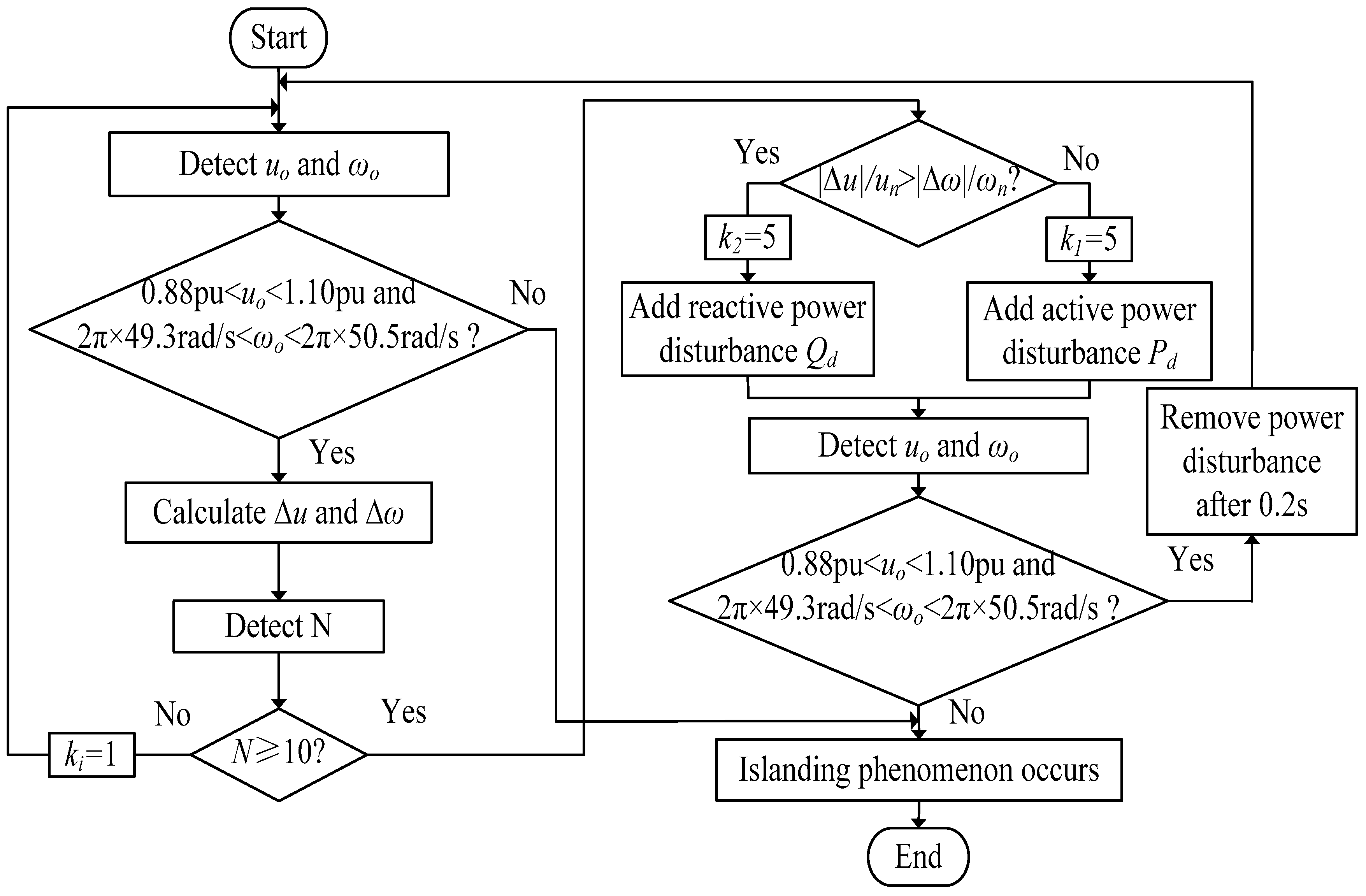
3.1. Smooth Switching Strategy of Micro-Grid Operation Modes
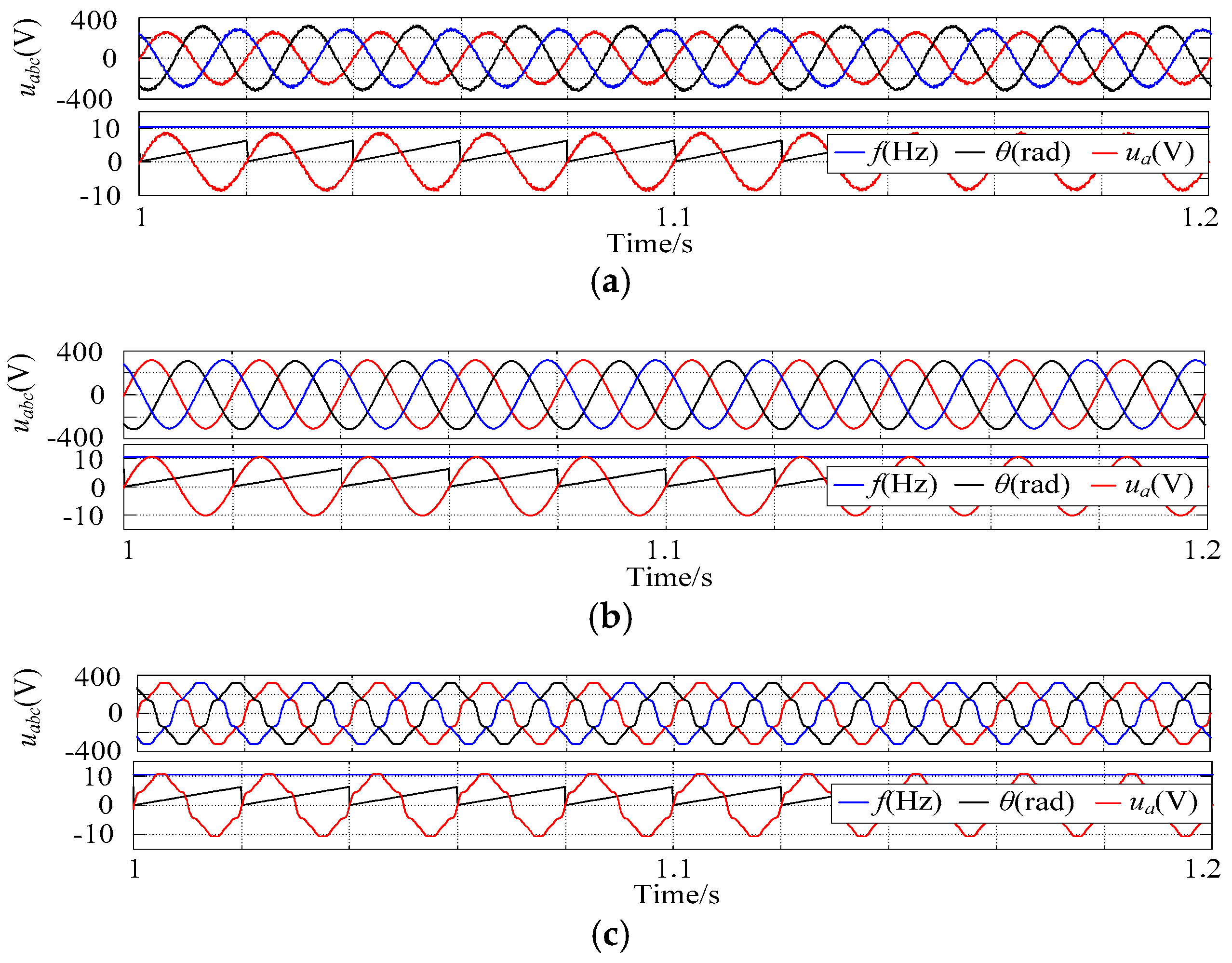
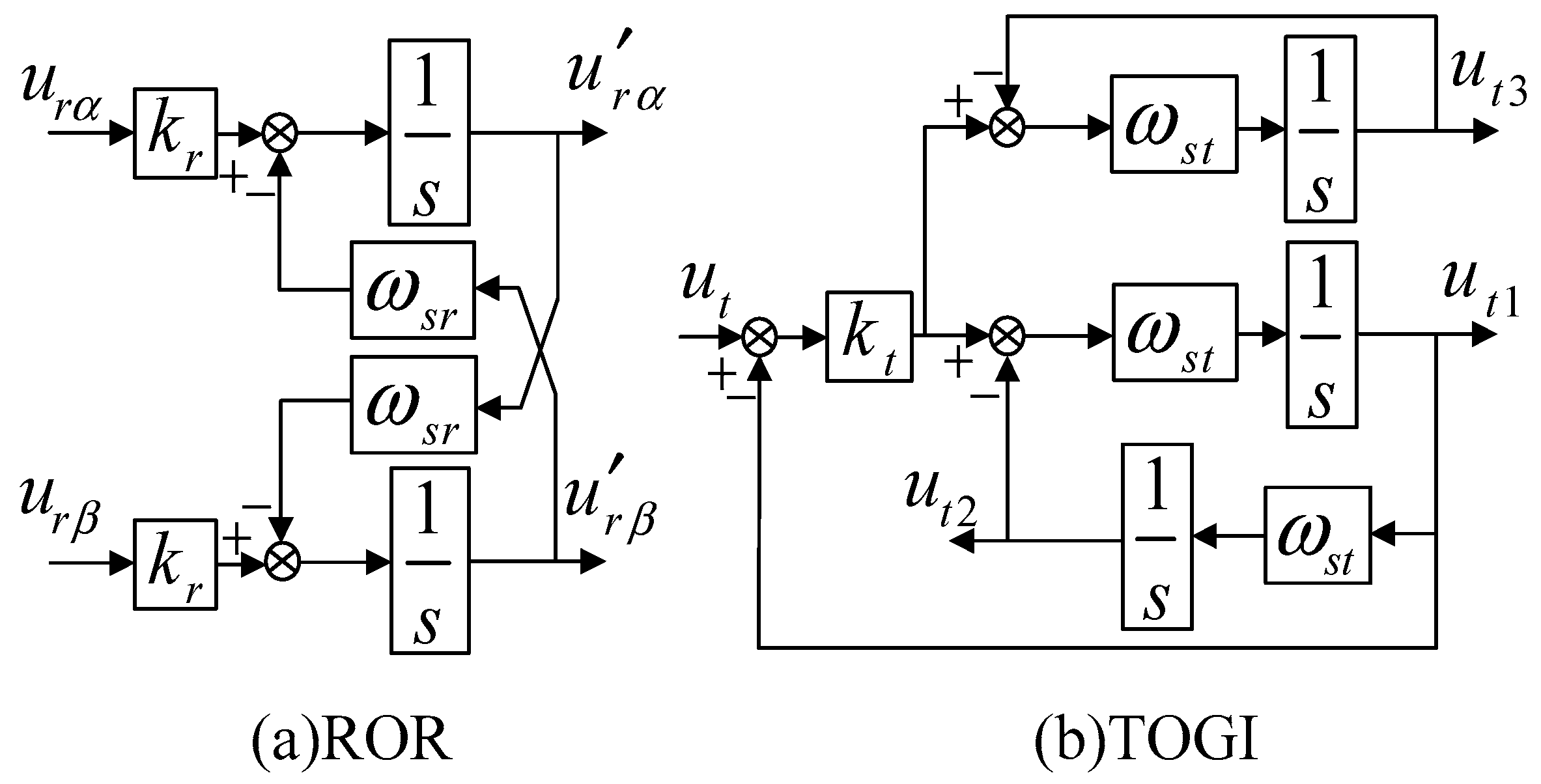
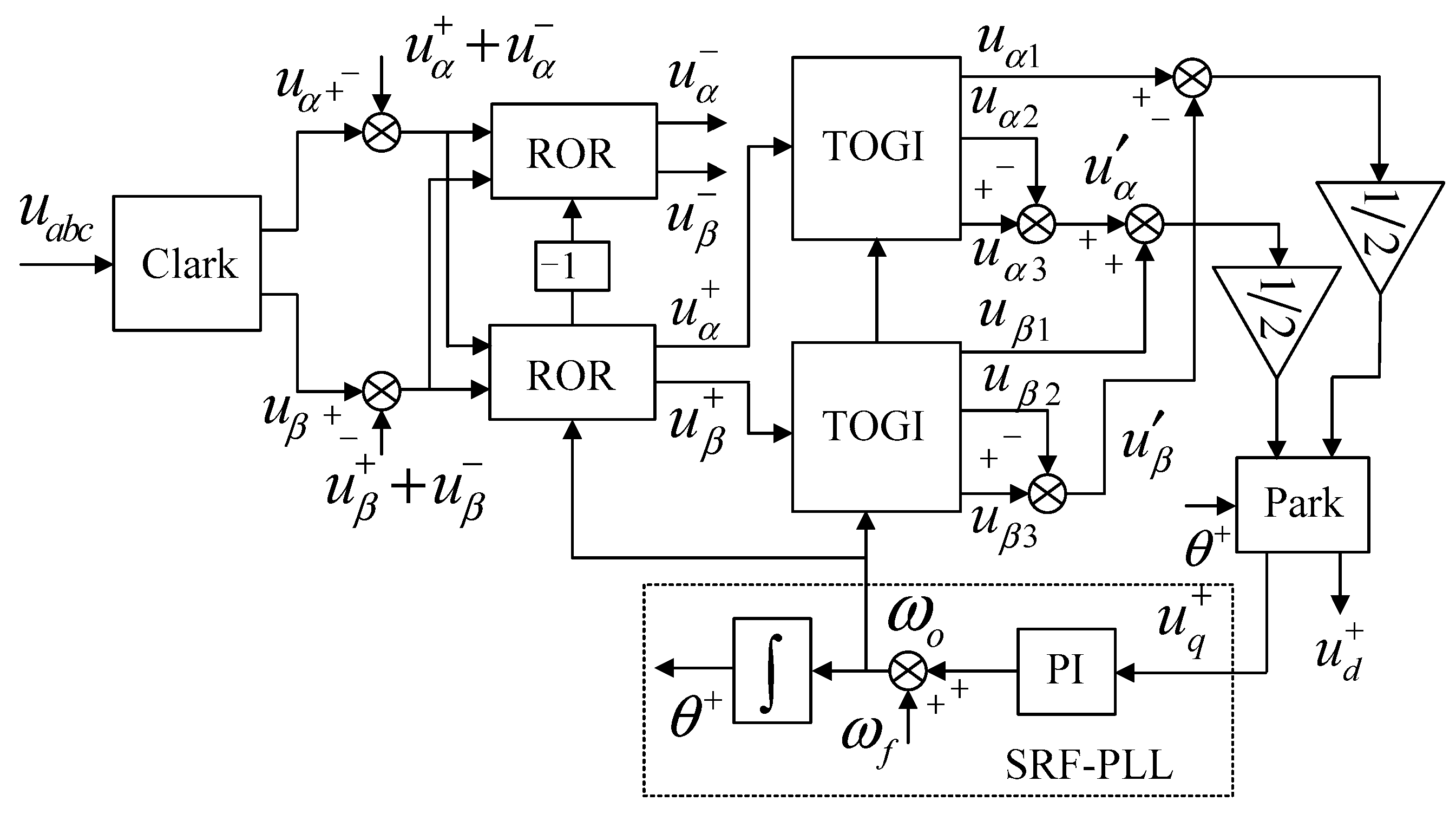
3.2. PLL Based on Cascaded General-Integrator
3.3. Active Switching Control from OGM to GCM
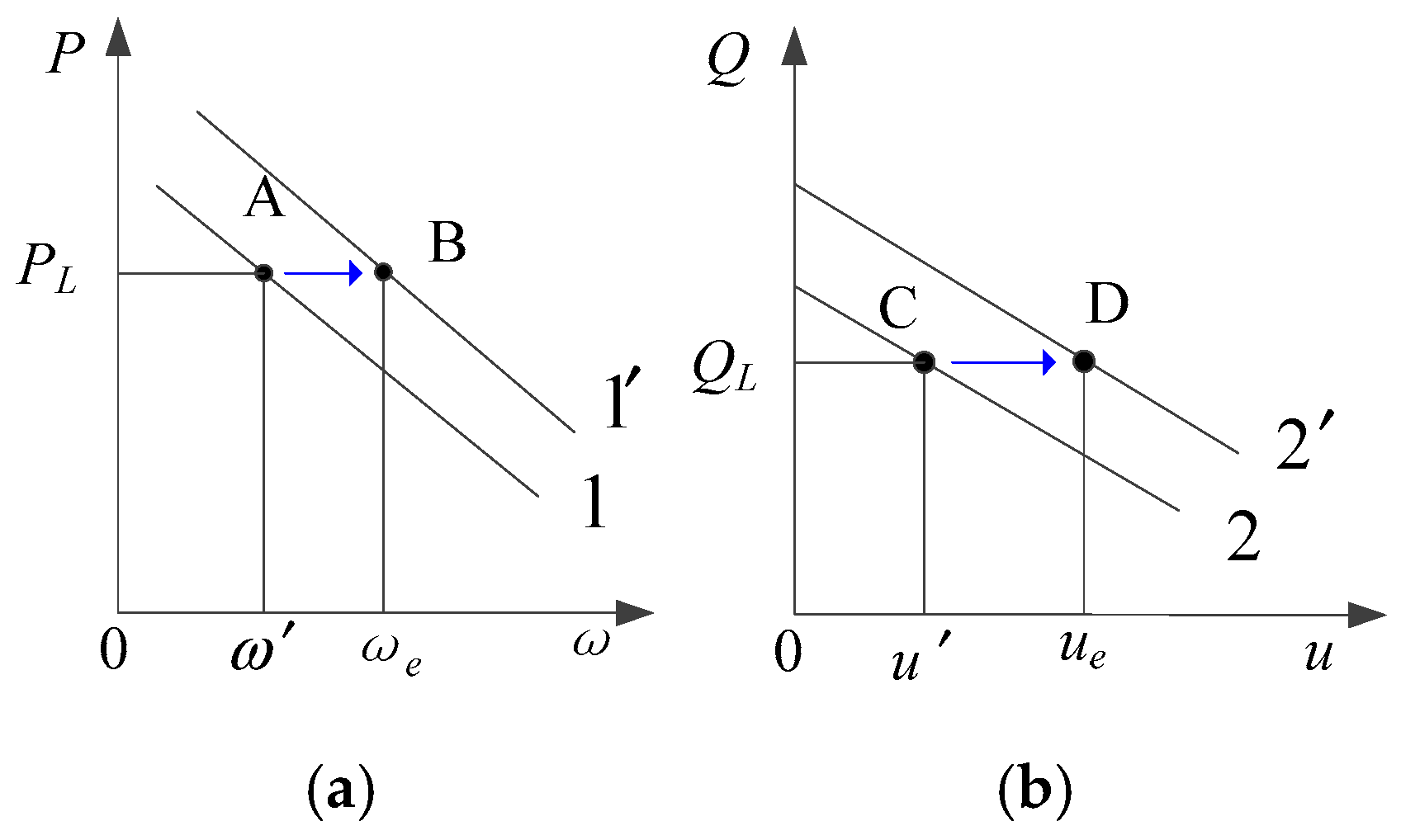
3.4. Reactive Switching Control between OGM and GCM
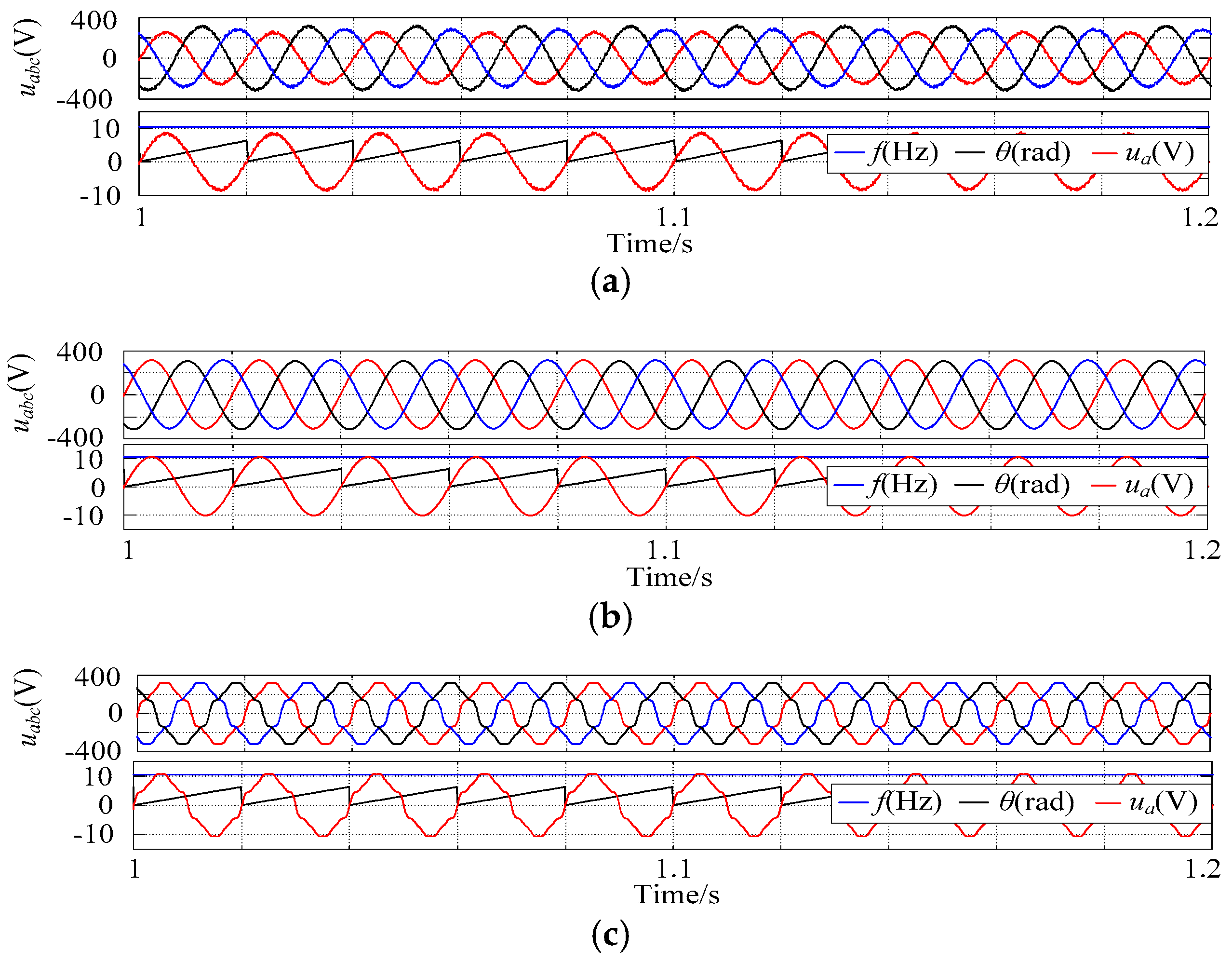
4. Controller Behavior and Simulation Results
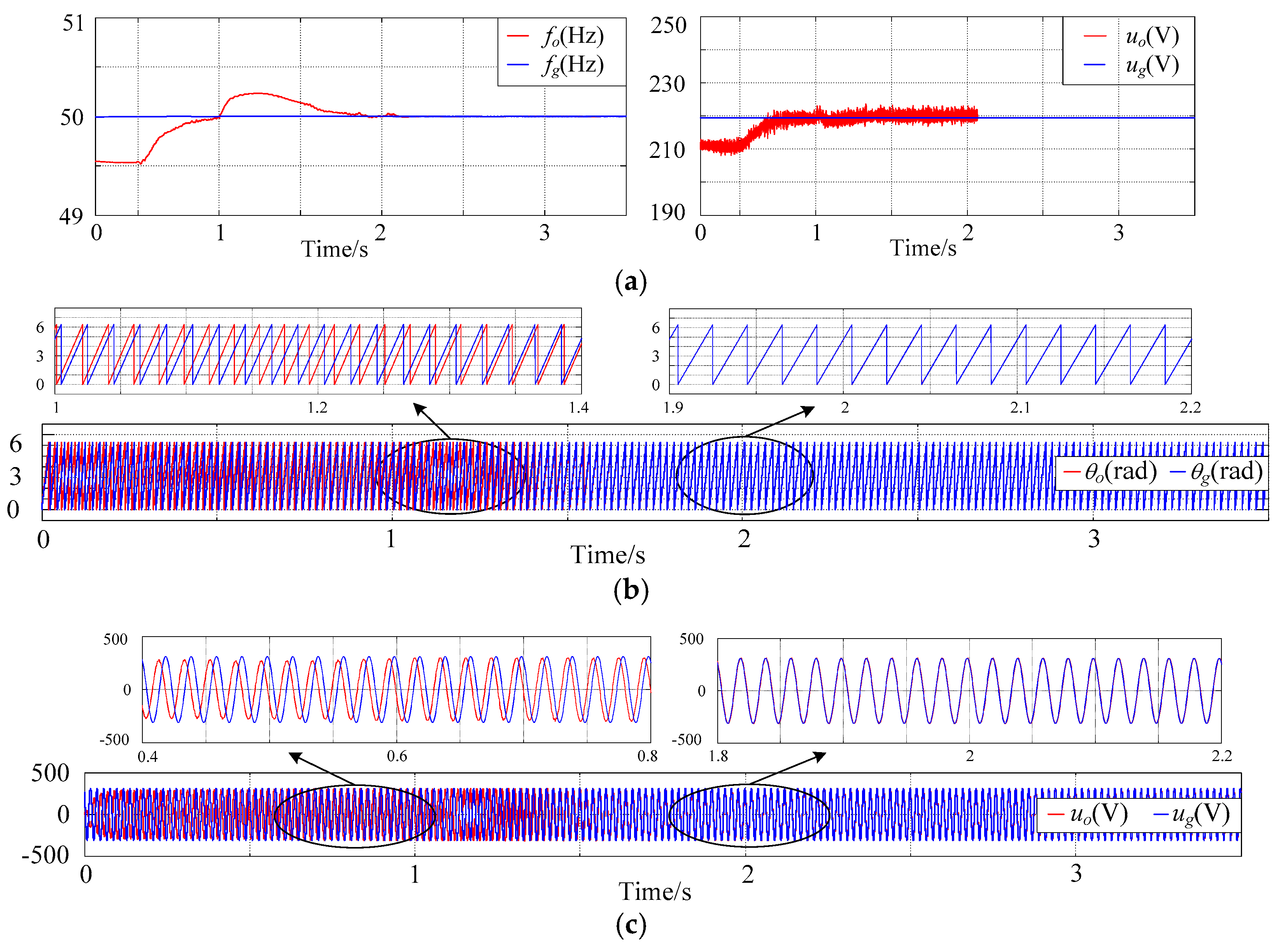
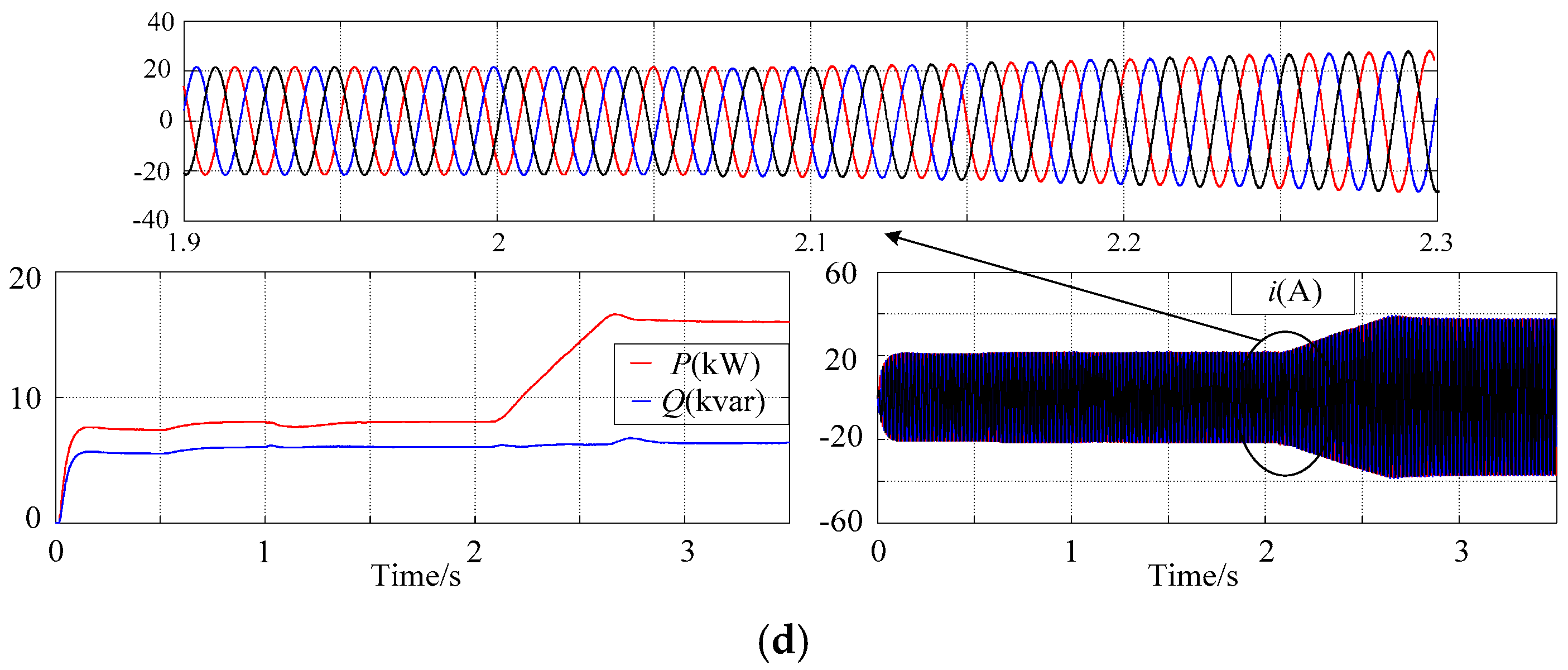
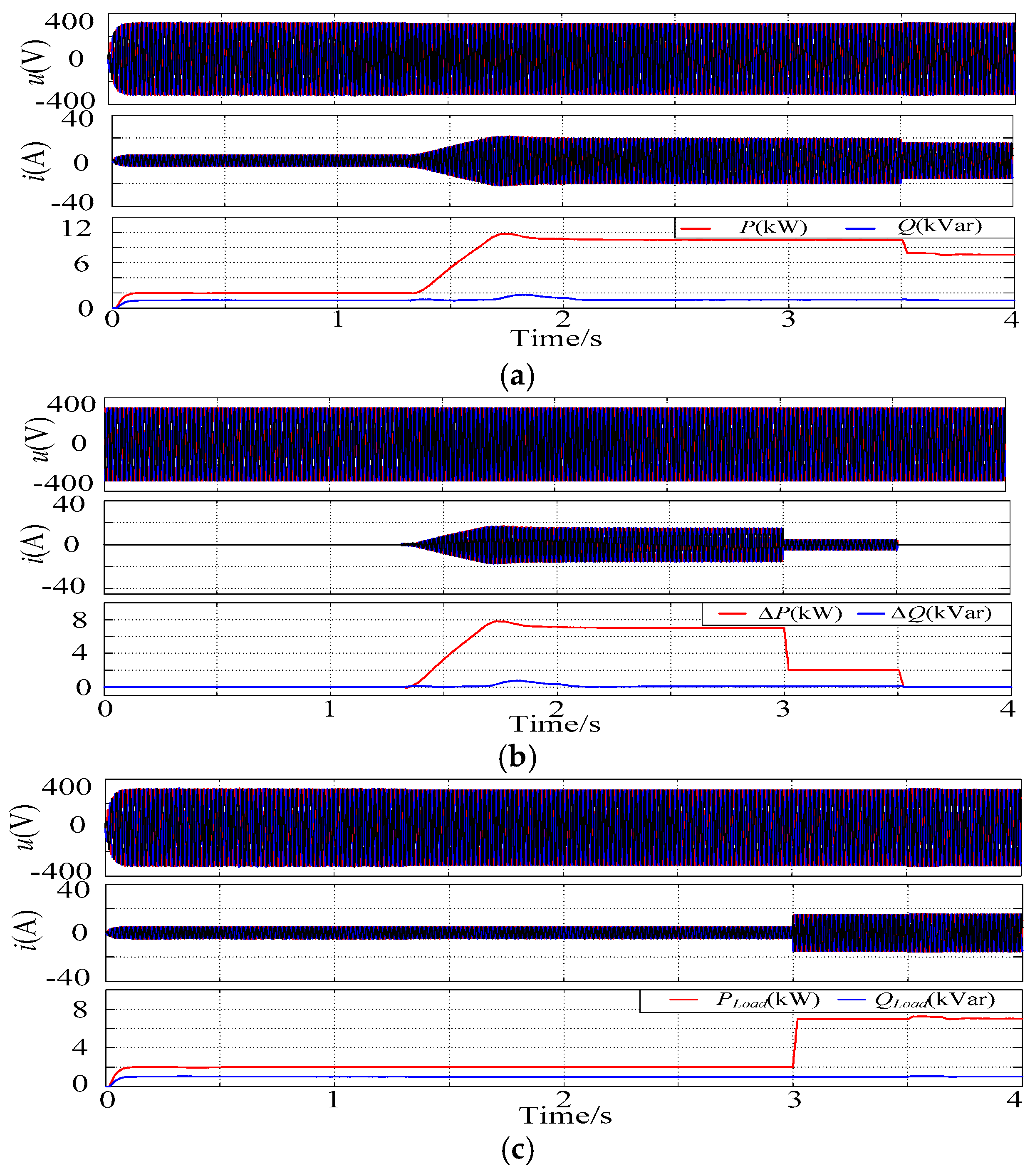
4.1. Quasi-Synchronization Process from OGM to GCM
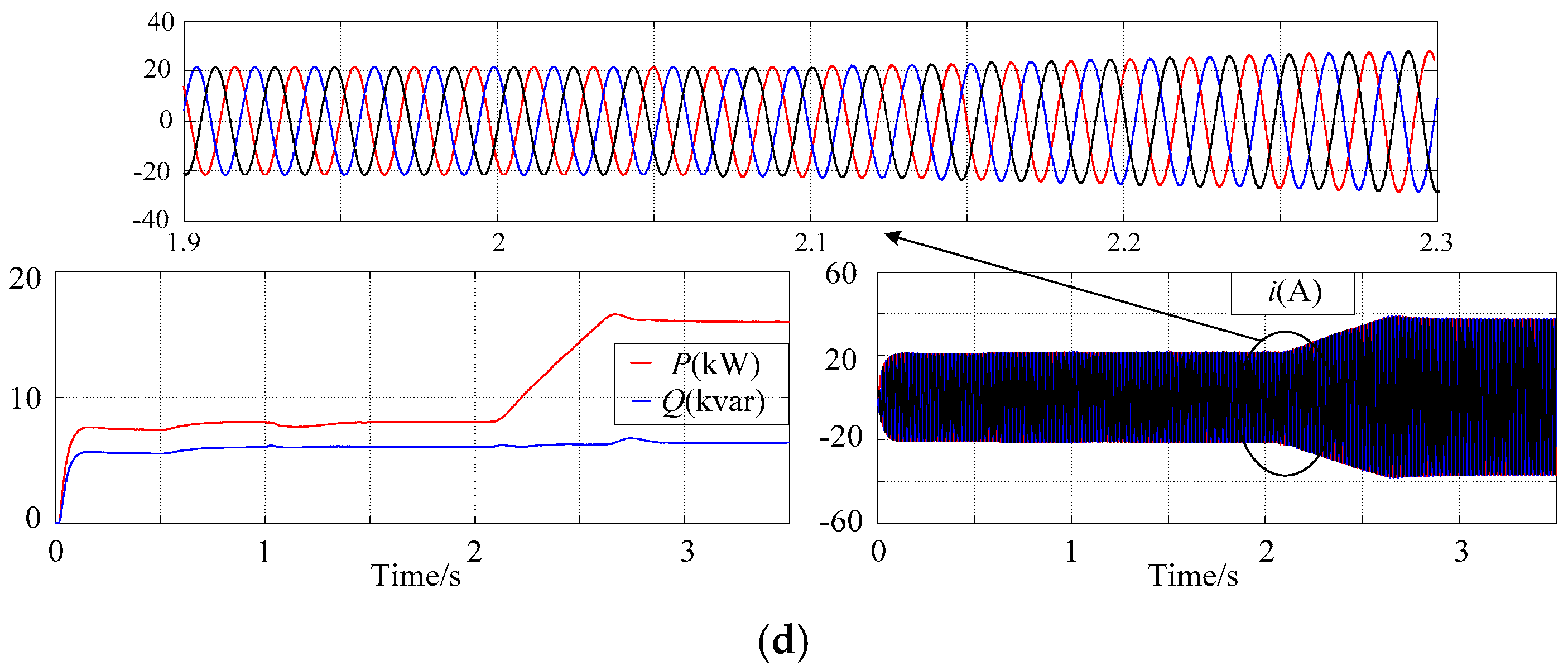
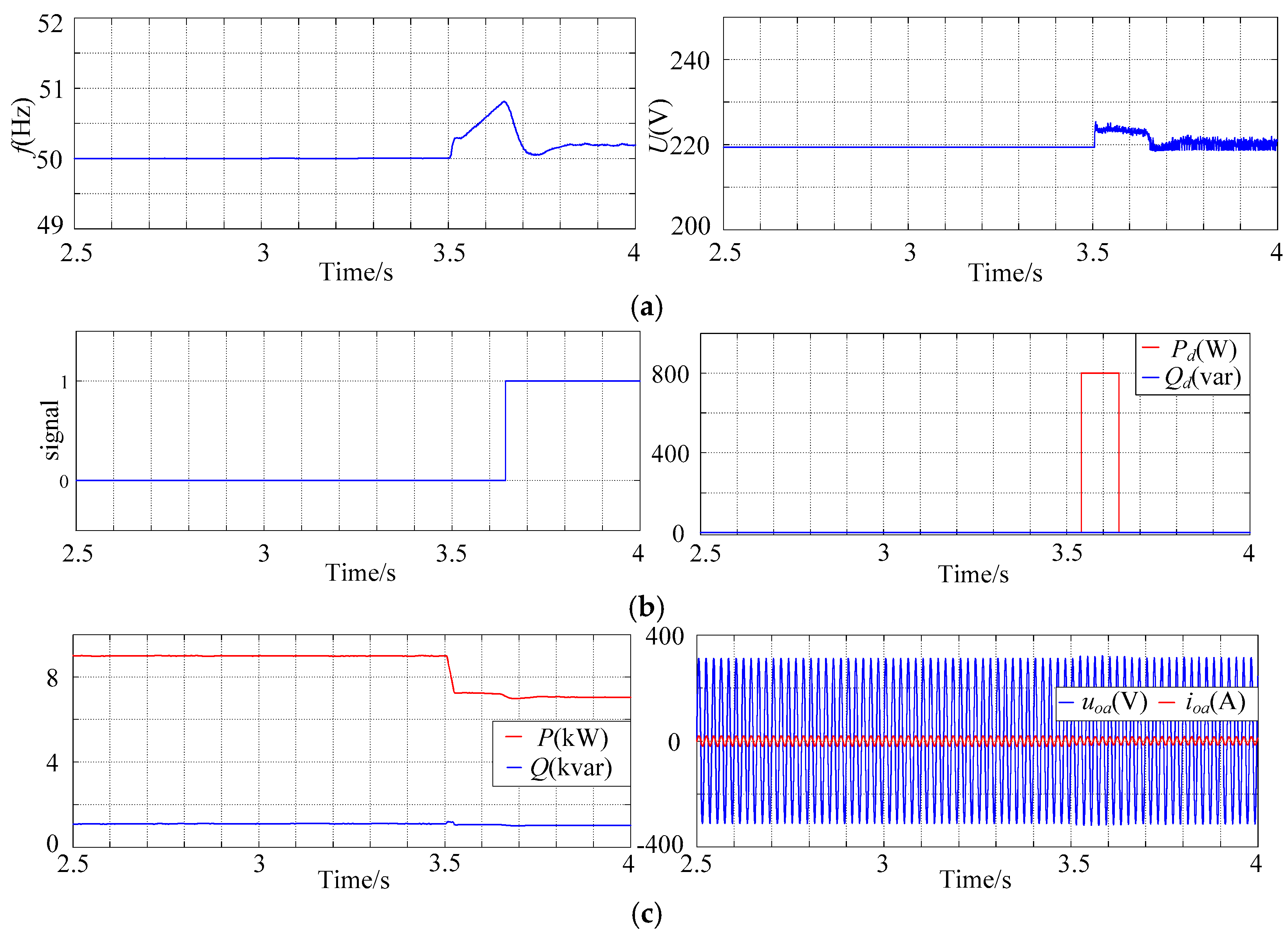
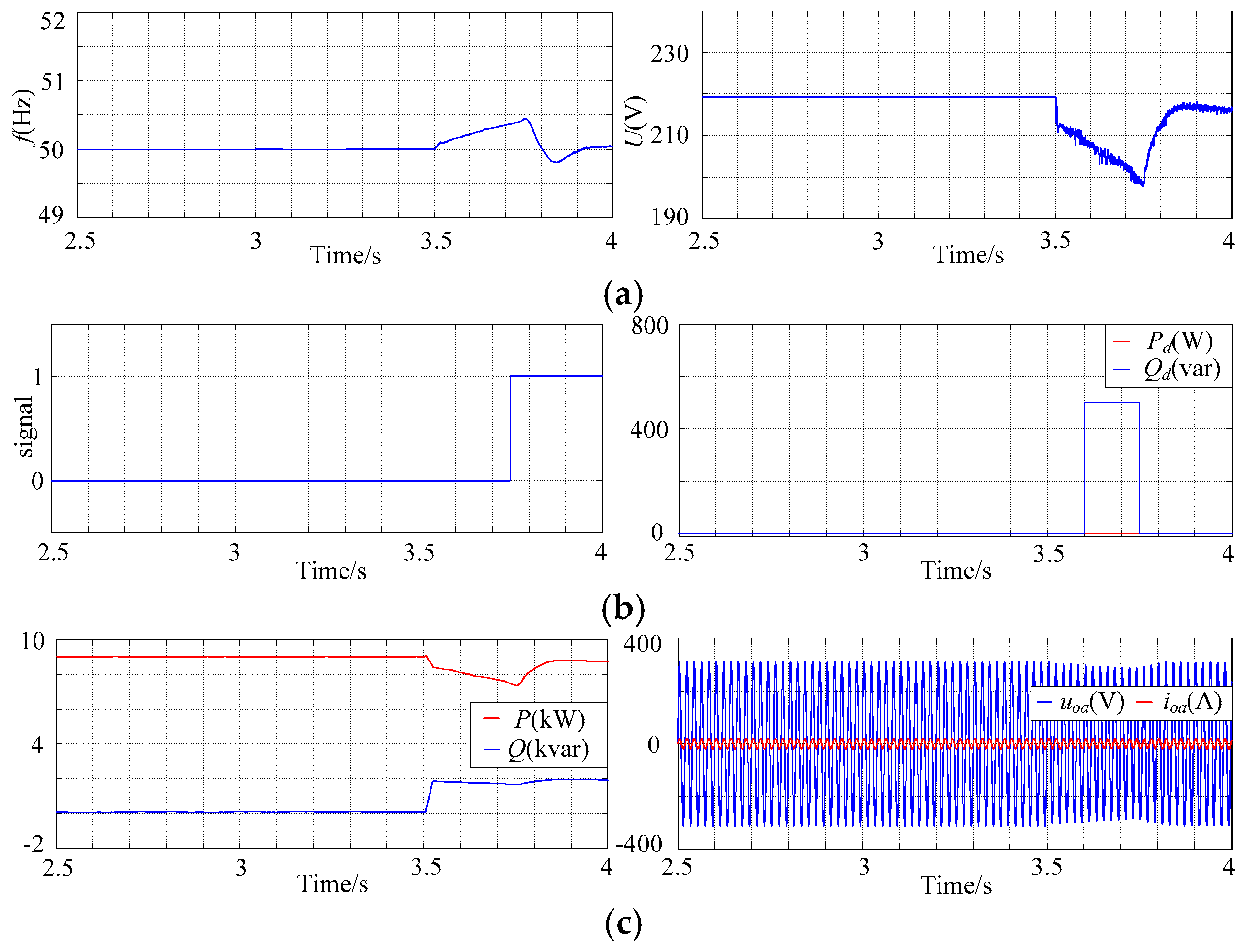
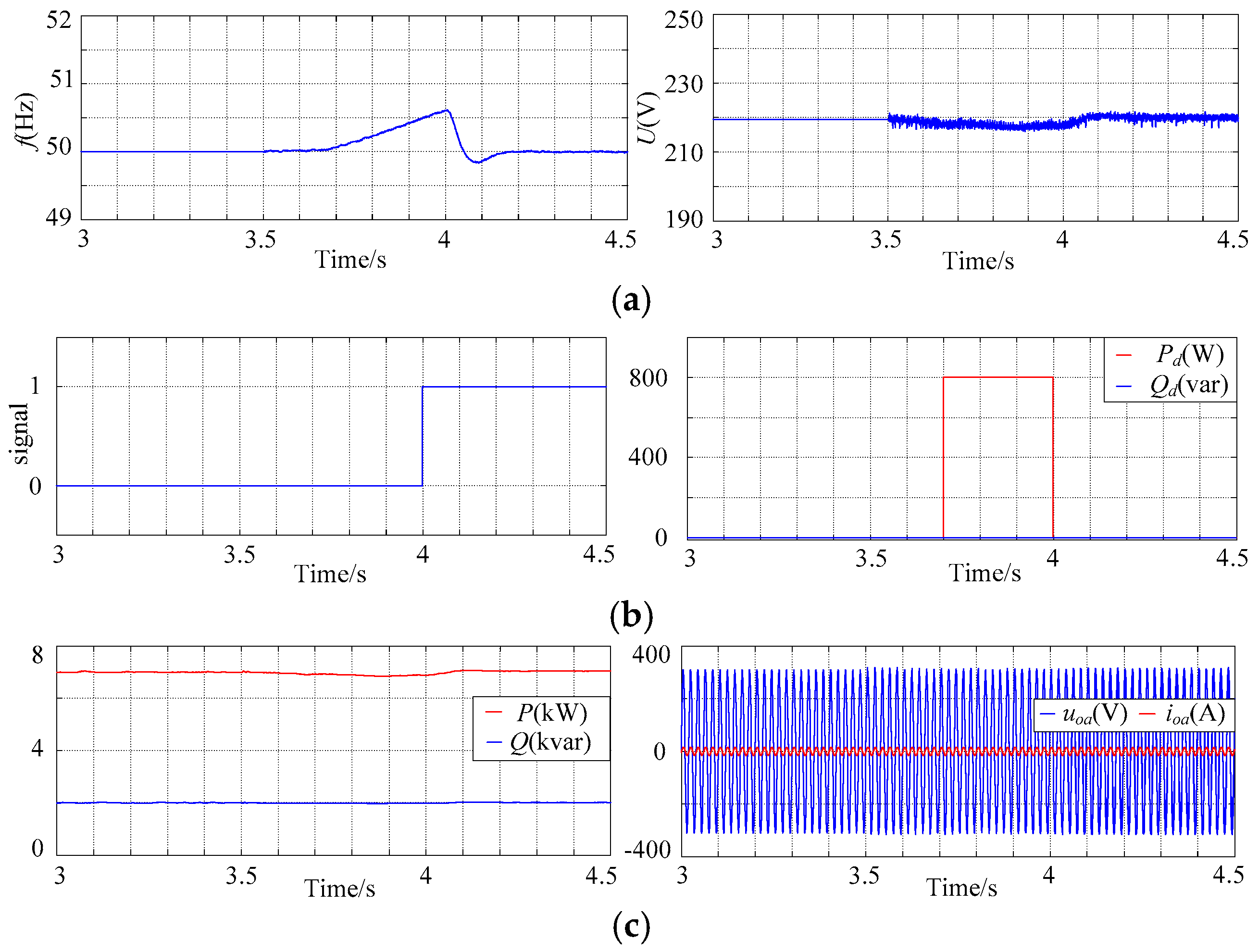
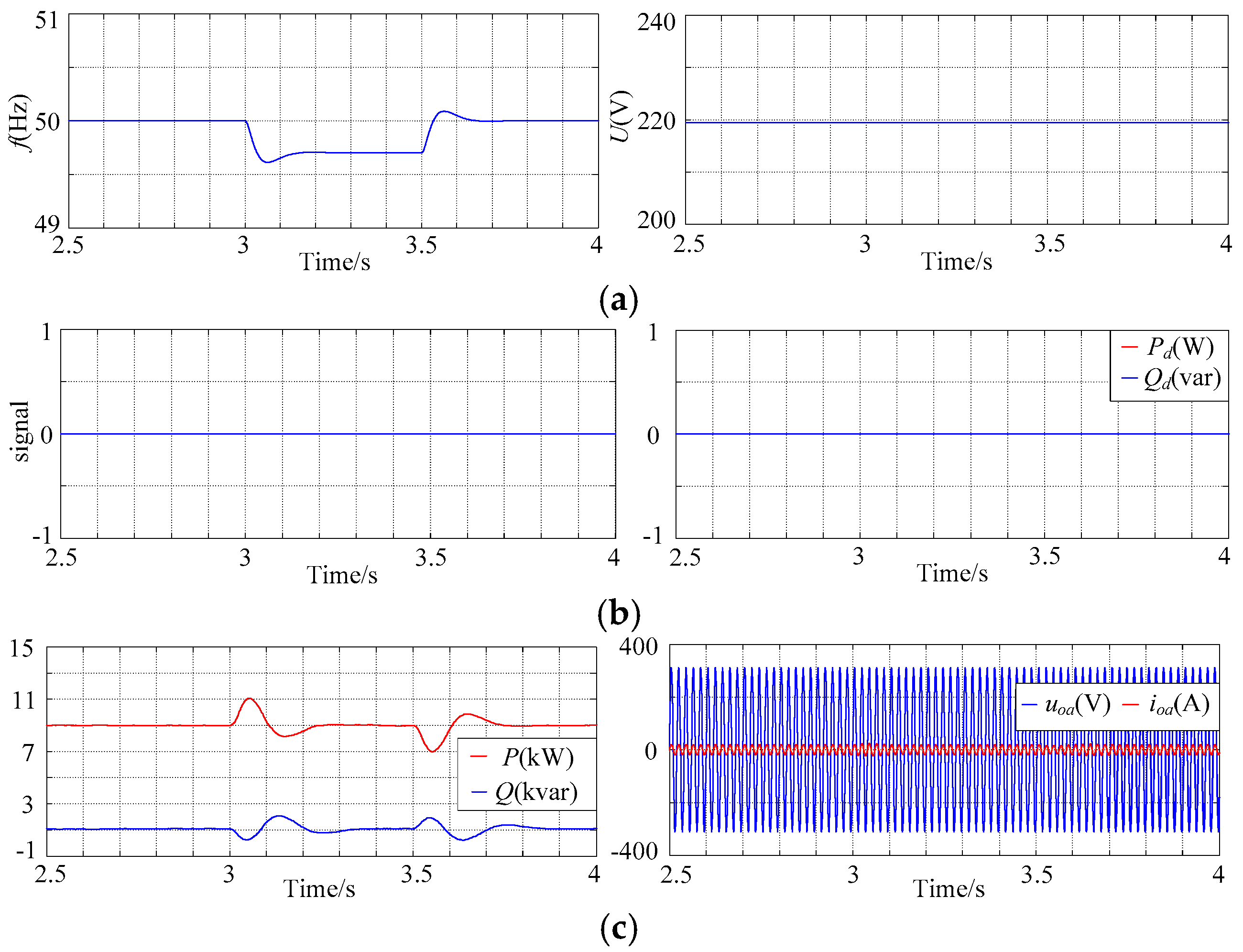
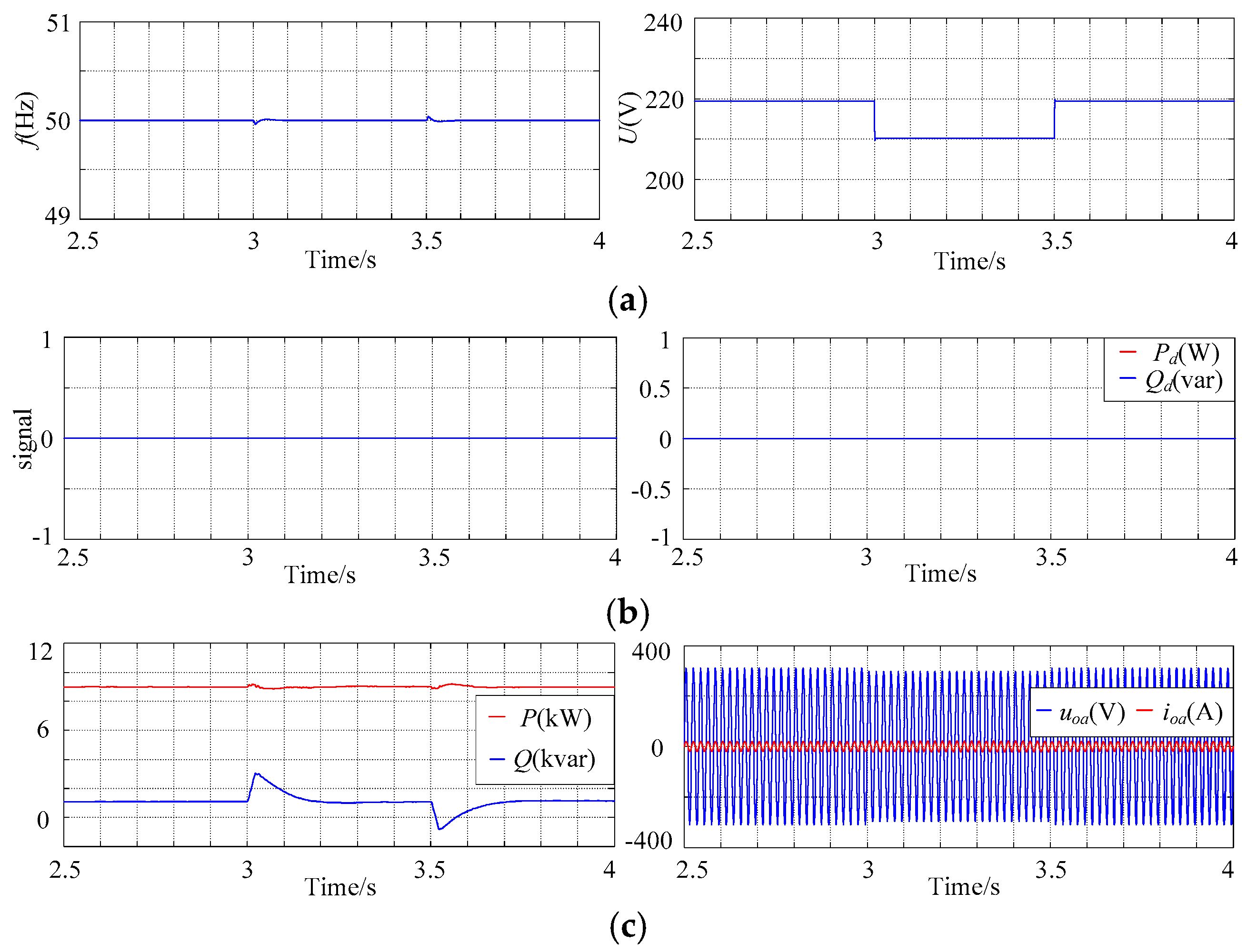
4.2. Switching Control from GCM to OGM
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Nomenclature
| Qi | IGBT device (i = 1–6) |
| L | filter inductors |
| C | filter capacitors |
| RL | sum of equivalent resistances of the filter inductors, switching devices and circuits |
| iLk | current of the filter inductor (k = a, b, c) |
| iok | output current of the inverter (k = a, b, c) |
| uok | output voltage of the inverter (k = a, b, c) |
| Rg | equivalent resistance of the grid |
| Lg | equivalent inductance of the grid |
| ugk | grid voltage (k = a, b, c) |
| Tset | given torque |
| Te | electromagnetic torque |
| Pset | given active power |
| Qset | given reactive power |
| θ | electrical angle |
| Δω | electrical angle speed difference |
| ωn | rated electrical angular velocity |
| ω | actual electrical angular velocity |
| Δu | output voltage difference |
| un | rated voltage |
| uo | output voltage |
| um | effective value of voltage |
| J | inertia coefficient of active power loop |
| K | inertia coefficient of reactive power loop |
| Dp | droop coefficient of P-f |
| Dq | droop coefficient of Q-V |
| Pe | instantaneous active power |
| Qe | instantaneous reactive power |
| uodq | components of uok in the dq rotating reference frame |
| iodq | components of iok in the dq rotating reference frame |
| urα, urβ | input voltages of ROR |
| ut | input voltage TOGI |
| ωsr | resonant frequency of ROR |
| ωst | resonant frequency of TOGI |
| kr | closed-loop system gain of ROR |
| kt | closed-loop system gain of TOGI |
| u′rαβ | output voltages of ROR regulator |
| utk | output voltages of TOGI regulator (k = 1, 2, 3) |
| ωd | angular frequency difference |
| tdq | lead time |
| PLoad | active power consumed by loads in normal operation |
| QLoad | reactive power consumed by loads in normal operation |
| P | active output power of the inverter |
| Q | reactive output power of the inverter |
| ∆P | unmatched active power |
| ∆Q | unmatched reactive power |
| ki | feedback proportion coefficients (i = 1, 2) |
| Pd | active power disturbance |
| Qd | reactive power disturbance |
| ωo(k) | VSG output angular frequency |
| ωn(k) | rated angular frequency |
| output values of the voltage | |
| reference values of the voltage | |
| N | counting value of the change of amplitude or frequency |
References
- Shuai, Z.; Sun, Y.; Shen, Z.J.; Tian, W.; Tu, C.; Li, Y.; Yin, X. Micro-grid stability: Classification and a review. Renew. Sustain. Energy Rev. 2016, 58, 167–179. [Google Scholar] [CrossRef]
- Hatziargyriou, N.; Asano, H.; Iravani, R.; Marnay, C. Microgrids: An overview of ongoing research, development, and demonstration projects. IEEE Power Energy Mag. 2007, 5, 1045–1050. [Google Scholar] [CrossRef]
- Wang, C.; Li, X.; Guo, L.; Li, Y. A seamless operation mode transition control strategy for a microgrid based on master-slave control. In Proceedings of the 31st Chinese Control Conference, Hefei, China, 25–27 July 2012; Volume 55, pp. 1644–1654. [Google Scholar]
- Zhuo, F.; Yang, M.J.; Wang, X.W. Research of seamless transfer control strategy of microgrid system. In Proceedings of the IEEE International Conference on Power Electronics & Ecce Asia, Jeju, Korea, 30 May–3 June 2011; pp. 2059–2066. [Google Scholar]
- Zhong, Q.C.; Weiss, G. Synchronverters: Inverters that mimic synchronous generators. IEEE Trans. Ind. Electron. 2010, 58, 1259–1267. [Google Scholar] [CrossRef]
- Shi, Q.; Wang, G.; Fu, L.; Jiang, W. Design Method of Simulative Synchronous Generator Based onVirtual Synchronous Generator Theory. Power Syst. Technol. 2015, 783–790. [Google Scholar] [CrossRef]
- Liu, J.; Miura, Y.; Ise, T. Comparison of dynamic characteristics between virtual synchronous generator and droop control in inverter-based distributed generators. IEEE Trans. Power Electron. 2015, 31, 3600–3611. [Google Scholar] [CrossRef]
- Yang, X.; Su, J.H.; Ding, M.; Yan, D. Research on frequency control for microgrid in islanded operation. Power Syst. Technol. 2010, 34, 164–168. [Google Scholar] [CrossRef]
- Cho, C.; Jeon, J.H.; Kim, J.Y.; Kwon, S.; Park, K. Active synchronizing control of a microgrid. IEEE Trans. Power Electron. 2011, 26, 3707–3719. [Google Scholar] [CrossRef]
- Guerrero, J.M.; Vasquez, J.C.; Matas, J.; Vicuna, L.G.D.; Castilla, M. Hierarchical control of droop-controlled AC and DC microgrids: A general approach toward standardization. IEEE Trans. Ind. Electron. 2010, 58, 158–172. [Google Scholar] [CrossRef]
- Vasquez, J.C.; Guerrero, J.M.; Savaghebi, M.; Garcia, J.E.; Teodorescu, R. Analysis, and design of stationary reference frame droop-controlled parallel three-phase voltage source inverters. IEEE Trans. Ind. Electron. 2012, 60, 1271–1280. [Google Scholar] [CrossRef]
- Lv, Z.; Sheng, W.; Zhong, Q.C. Virtual synchronous generator and its applications in micro-grid. Proc. CSEE 2014, 34, 2591–2603. [Google Scholar] [CrossRef]
- Yang, L.; Wang, C.; Lv, Z.; Liu, L.; Liu, H. The Method of Pre-Synchronized Grid-Connection of Synchronverter. Power Syst. Technol. 2014, 11, 3103–3108. [Google Scholar] [CrossRef]
- Wu, S.J.; Xu, Q.S.; Yuan, X.; Li, Q.; Liu, D. Anti-islanding detection standards for distributed PV power generations and analysis on factors influencing non-detection zone of islanded PV generation. Power Syst. Technol. 2015, 39, 924–931. [Google Scholar] [CrossRef]
- Liu, F.; Kang, Y.; Zhang, Y.; Duan, S. Improved SMS islanding detection method for grid-connected converters. IET Renew. Power Gener. 2010, 4, 36–42. [Google Scholar] [CrossRef]
- Tang, T.; Xie, S.J. Research on 2nd harmonic impedance measurement based active islanding detection method. In Proceedings of the Power Electronics and Motion Control Conference, Harbin, China, 2–5 June 2012; pp. 1812–1816. [Google Scholar]
- Hou, M.; Gao, H.; Liu, B.; Xu, M. Islanding detection method based on phase shift. Electr. Power Autom. Equip. 2009, 29, 22–26. [Google Scholar]
- Lissandron, S.; Sgarbossa, R.; Santa, L.D.; Mattavelli, P.; Turri, R.; Cerretti, A. Impact of non-simultaneous P/f and Q/V grid code requirements on PV inverters on unintentional islanding operation in distribution network. In Proceedings of the 2015 IEEE 6th International Symposium on Power Electronics for Distributed Generation Systems (PEDG), Aachen, Germany, 22–25 June 2015; pp. 1–7. [Google Scholar] [CrossRef]
- Chao, H.; Wang, M.; Chen, G. Islanding detection based on droop control and its improvement strategy. Electr. Power Autom. Equip. 2015, 35, 87–92. [Google Scholar] [CrossRef]
- Zhao, X.; Jin, X.M.; Li, G.L. A Frequency-locked Loop Technology of Grid-connected Inverters Based on the Reduced Order Resonant Controller. Proc. CSEE 2013, 33, 38–44. [Google Scholar] [CrossRef]
- Shi, R.; Zhang, X.; Liu, F.; Xu, H.; Hu, C. A Control Strategy for Unbalanced and Nonlinear Mixed Loads of Virtual Synchronous Generators. Proc. CSEE 2016, 36, 6086–6095. [Google Scholar] [CrossRef]
- Guo, X.; Wu, W.; Chen, Z. Multiple-complex coefficient-filter-based phase-locked loop and synchronization technique for three-phase grid-interfaced onverters in distributed utility networks. IEEE Trans. Ind. Electron. 2011, 58, 1194–1204. [Google Scholar] [CrossRef]
- Huang, Y.; Luo, A.; Chen, Y.; Chen, Z. A current feedback control strategy for parallel operation of ulti-inverters using third-order general-integrator rossover cancellation method. Proc. CSEE 2014, 34, 4855–4864. [Google Scholar] [CrossRef]
- Zhong, Q.C.; Nguyen, P.L.; Ma, Z.; Sheng, W. Self-synchronized synchronverters: Inverters without a dedicated synchronization unit. IEEE Trans. Power Electron. 2013, 29, 617–630. [Google Scholar] [CrossRef]
- Li, B.; Zhou, L.; Yu, X.; Zheng, C.; Liu, J. Secondary Frequency Regulation for Microgrid Inverters Based on Improving Virtual Synchronous Generator. Power Syst. Technol. 2017, 41, 2680–2687. [Google Scholar] [CrossRef]
- Huang, X.; Jin, X.; Ma, T.; Tong, Y. A voltage and frequency droop control method for microsources. Trans. China Electrotech. Soc. 2011, 27, 1–5. [Google Scholar] [CrossRef]
- IEEE. 1547-2003-IEEE Standard for Interconnecting Distributed Resources with Electric Power Systems; Institute of Electrical & Electronics Engineers Inc.: Piscataway, NJ, USA, 2003; pp. 1–28. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Quantity | Symbol | Quantity | Symbol | Quantity |
|---|---|---|---|---|---|
| Ug (V) | 220 | Dp (Nm·s/rad) | 5 | kωi | 100 |
| fg (Hz) | 50 | Dq (A) | 320 | kθp | 100 |
| Udc (V) | 700 | J (kg·m2) | 0.08 | tdq (s) | 0.02 |
| frequency (kHz) | 10 | K (A·s) | 6.5 | k1 | 3 |
| Capacity (KVA) | 10 | kup | 50 | k2 | 5 |
| Lf (mH) | 0.4 | kui | 100 | Pd (W) | 800 |
| Cf (μF) | 10 | kωp | 50 | Qd (Var) | 500 |
© 2018 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, K.; Zhou, G.; Xu, P.; Ye, H.; Tan, F. The Integrated Switching Control Strategy for Grid-Connected and Islanding Operation of Micro-Grid Inverters Based on a Virtual Synchronous Generator. Energies 2018, 11, 1544. https://doi.org/10.3390/en11061544
Shi K, Zhou G, Xu P, Ye H, Tan F. The Integrated Switching Control Strategy for Grid-Connected and Islanding Operation of Micro-Grid Inverters Based on a Virtual Synchronous Generator. Energies. 2018; 11(6):1544. https://doi.org/10.3390/en11061544
Chicago/Turabian StyleShi, Kai, Guanglei Zhou, Peifeng Xu, Haihan Ye, and Fei Tan. 2018. "The Integrated Switching Control Strategy for Grid-Connected and Islanding Operation of Micro-Grid Inverters Based on a Virtual Synchronous Generator" Energies 11, no. 6: 1544. https://doi.org/10.3390/en11061544