The transportation sector has become one of the main areas of energy consumption and has had a high impact on electrical power source sectors. Moreover, there have been several studies of new load characteristics that exist in electrical power systems. The plug-in electric vehicle (PEV) is a new electrical load type that is considered an emerging load in the focus area. The usage of PEVs has increased due to their low carbon emissions, promotion by governments, or privileges into certain special areas. The advantage of a PEV is that it utilizes both a fuel cell and battery as the energy source. The battery energy storage selected for use in PEVs can be converted and combined with the power to the traction motor drive systems. The AC-DC converter has been used to convert electricity from the electrical power system to the battery as the charging state when the battery has a low level state-of-charge (SOC) [
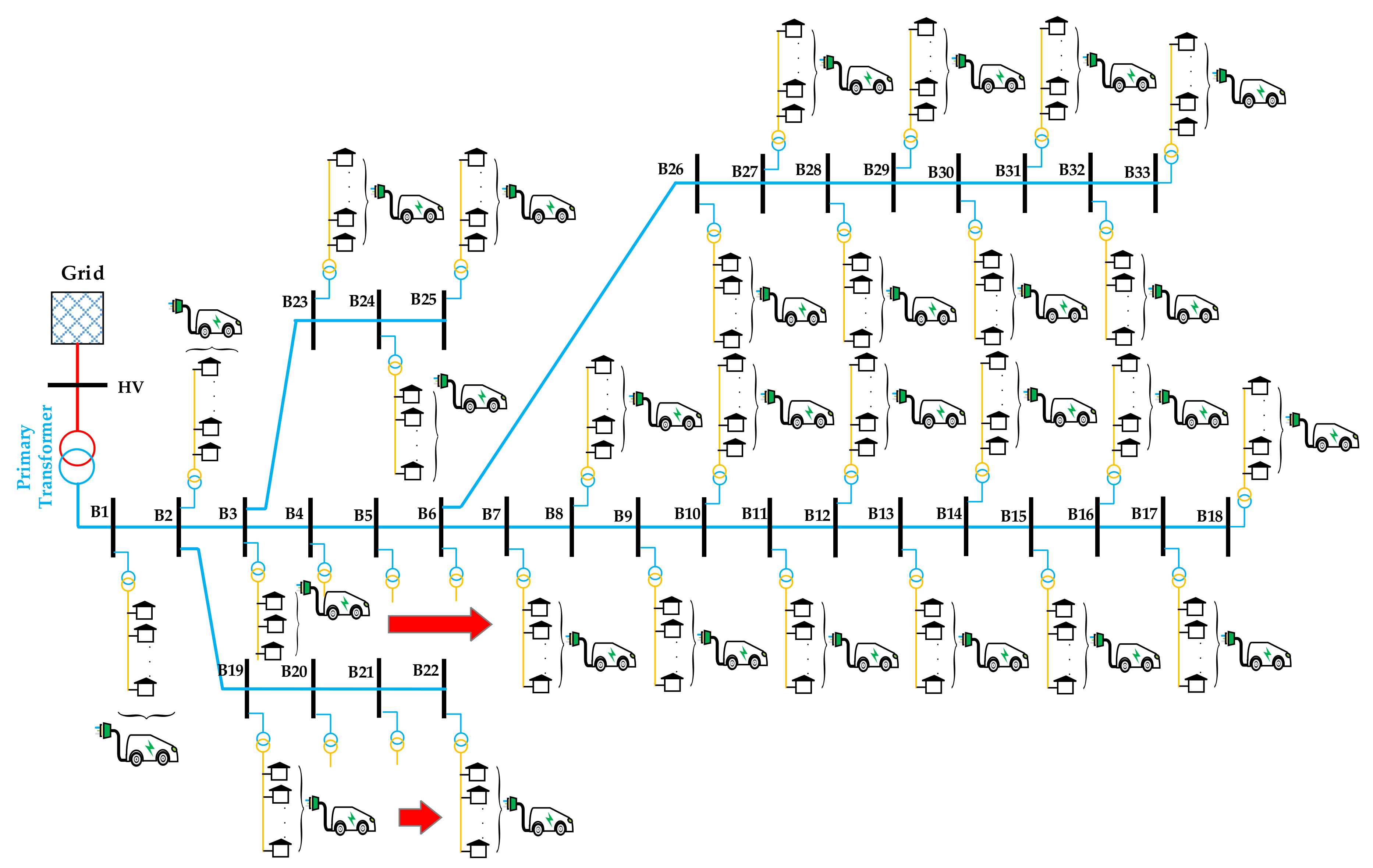
1]. Generally, the PEV charging condition is defined in normal charging mode for consuming electricity energy. The increasing penetration of PEVs will be connected to each household and consume energy as shown in
Figure 1. Interestingly, the recharging condition of the PEV battery has been taking place on the grids simultaneously, so the power system will be impacted.
Meanwhile, the impact of electric vehicles on fast charging reduces the system voltage stability. Charging the battery depends on the charging type of the EVs battery installed at the charging stations [
2]. Energy sources need to be supported under the power requirements of electrical equipment when the system is installed. Generally, the energy sources can be generated from conventional energy sources combined with renewable energy sources [
3]. Therefore, a risk assessment was created for the electrical system using the charging behavior of electric vehicles. This can reduce the risk assessment on the power distribution system [
4]. Both battery electric vehicles (BEVs) and plug-in hybrid electric vehicle loads (PHEVs) have been presented by considering the effect on vehicle-to-grid.(V2G) and grid-to-vehicle (G2V) power curves in terms of power demand [
5]. The different level of penetration of BEVs and EVs will be directly impacted by the power demand response. The optimal management of charging should be considered under the demand response condition. The other uncertain propagation of charging from PEVs is affected by the aging of the power transformer. One type of methodology from smart charging is the coordinated charging of plug-in hybrid electric vehicles (PHEVs) that can reduce distribution system losses [
6]. The literature [
7] proposed an objective function from the triangle equivalence of losses, and load factor and load variance were used to find the optimal conditions on the PHEVs demand load profiles. Furthermore, the electrical power system networks were connected through a transmission lines system so that the distribution feeder reconfiguration could be adapted to manage the energy consumption from the PHEVs. This method can reduce the expected costs and total power loss reductions from the variance of penetration level of the PEVs in the electrical power system [
8]. Additionally, the user’s benefits are becoming key issues to manage in terms of cost reduction which can be reduced battery capacity degradation, electricity cost, and the waiting time of charging queues at charging stations. Thus, the charging management should be controlled by optimal charging scheduling of EVs and provide maximum benefits for EV owners [
9]. The aggregated EV charging demand needs to be determined and investigated in terms of any uncertain patterns of EV load in the electrical power system that are relevant to an agent-based approach. The agent-based approach consists of an EV type, battery and charging process, charging infrastructure, mobility, and society. Monte Carlo techniques were used to define the charging demand and charging scenarios, which revealed voltage profiles reduction during peak demand charging and should be controlled for the condition of balanced and unbalanced loads [
10,
11,
12]. Consequently, the PEVs can reduce the impact from charging mode at the same time or in the same power transmission line by using V2G technology and in combination with smart grid control [
1,
13,
14,
15,
16,
17]. The smart grid control concept is needed to manage all the relevant areas in optimal condition such as power sources, transmission system, distribution system, user benefits, and economics [
18,
19,
20]. Moreover, fast charging station in urban dwelling areas can be impacted by the electrical power system under conditions of voltage drop, transmission line loading, transformer loading, peak demand, and increase of total power loss [
21,
22]. Therefore, the electrical power system needs to be managed to reduce the factors that limit its capacity to provide sufficient energy. Interestingly, the electric vehicle integration in demand response (DR) programs can manage energy consumption at the customer side of the meter which can reduce peak demand and price volatility by utilizing smart grid enabling technologies. Moreover, the charging and discharging of EVs from the DR programs could be identified and evaluated in optimal conditions for the customer type in terms of DR programs and DR potential benefits [
23]. Therefore, optimization techniques are applied to find the optimal solution to problems that affect the PEVs increase and high consumption of energy from the electrical power system networks [
9,
24,
25,
26]. Meanwhile, many current PEVs have been provided for users to replace the old internal combustion car, which are produced by different brands in the market. Furthermore, the Li-Ion battery is a popular and high-power density that is used in each PEV such as the Toyota Prius (PHEV2012), Chevrolet Volt, Mitsubishi i-MiEV, Nissan Leaf, and Tesla Roadster. Comparatively, the PHEVs and BEVs are a subset of the manufacture of PEVs with a higher distance efficiency as described in [
27]. The authors in [
28] executed V2G using bi-directional power flow and emergency power backup to reverse energy from the PEV’s battery to the apparatus of the house. However, the process of operating in V2G mode can increase battery wear and shorten the battery life. Therefore, the V2G setup needs to be managed in optimal condition and provide important services as well as balance renewable peak and bulk storage. The charging scheme and configuration of several PEVs are described in the International Electrotechnical Commission Standard (IEC 61851-1) and Society of Automotive Engineers standard (SAE J1772). Charging mode was defined in connection mode of DC power and AC power based on the battery charger and the position of charging such as normal charging mode used in residential distribution network. Therefore, the standard charging power levels of the IEC 61851-1 and SAE J1772 standard were used in private sectors, domestic environments, or public areas shown in
Table 1 and
Table 2 as follows [
17,
29].
The general practice of power flow study is to present the composite load characteristics at the point of common coupling of an electrical power system network. Meanwhile, the electrical load models consist of the static load model and dynamic load model. Therefore, the static load model is selected in static analysis for solving the power flow analysis using the conventional load
to represent each load model in the electrical power system [
32]. The static load model consists of voltage dependency and frequency dependency of the load characteristics [
33]. The battery charger in normal mode charging is represented by the characteristics of the PEVs, which is described in an exponential load by laboratory testing [
34]. Many researchers have studied and found the impact of the PEVs on the electrical power system network as discussed in previous paragraphs, but they did not clarify and consider the actual behavior of the PEVs under voltage-dependent power flow analysis. For this reason, this article is going to investigate the PEVs load model based on the exponential load characteristics by considering the static load base. The PEV was defined in the behavior of general charging in normal charging rate that used the average value of charging rate remain about 1.2–3.7 kW of the PEV charger from
Table 3. It means that the charging process took long time to charge the battery. Therefore, the charging levels of battery were defined on Mode 1 (IEC61851-1) or AC level 1 to 2 (SAE J1772) at standard outlet. However, PEV can generally be battery charge in Mode 1. There are consuming low power at 120–240 V range of the household and public area. So that, the load types were defined as a balanced load system that used for solving the impact from conventional load and PEVs to the electrical power system.








{kind=link}
{kind=link}
{kind=link}
{kind=link}