Disturbance Rejection Control Method of Double-Switch Buck-Boost Converter Using Combined Control Strategy

Abstract
:1. Introduction
2. Topology, Modulation Method and Modeling
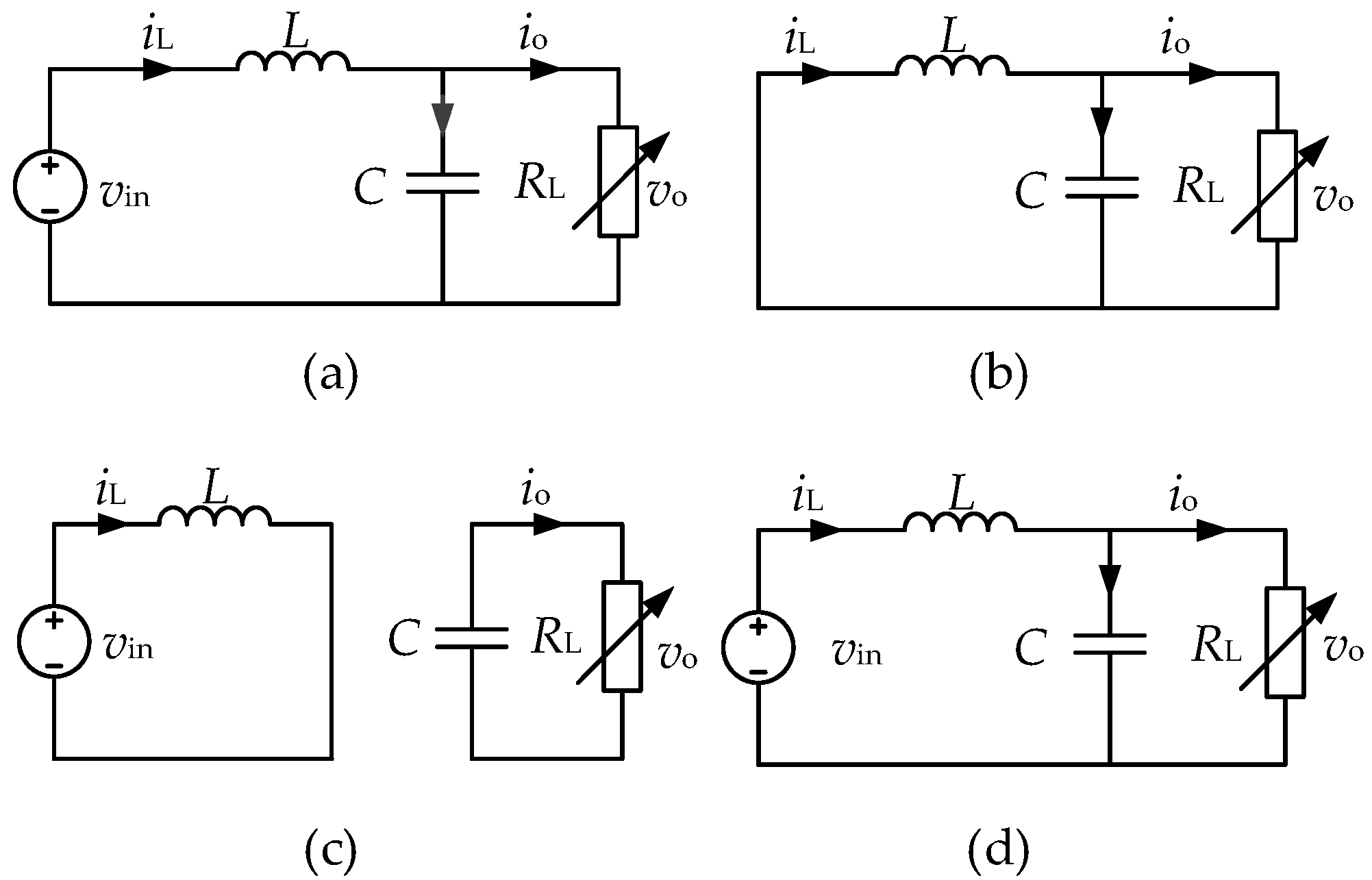
2.1. Principles of the Proposed Scheme
2.2. Small Signal Model
3. Control Strategy for DSBB
3.1. LADRC Based Current Control Loop
3.2. Consideration of Voltage Control Loop
4. Simulation and Experimental Results
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Tai, L.; Lin, M.; Wang, J.; Liu, K.; Gao, T. Analysis and design of a wide input range DC-DC converter for high-speed generator energy storage systems. In Proceedings of the IECON 2015—41st Annual Conference of the IEEE Industrial Electronics Society, Yokohama, Japan, 9–12 November 2015. [Google Scholar]
- Andersen, G.K.; Blaabjerg, F. Current programmed control of a single-phase two-switch buck-boost power factor correction circuit. IEEE Trans. Ind. Electron. 2006, 53, 263–271. [Google Scholar] [CrossRef]
- He, M.; Zhang, F.; Xu, J.; Yang, P.; Yan, T. High-efficiency two-switch tri-state buck-boost power factor correction converter with fast dynamic response and low-inductor current ripple. IET Power Electron. 2013, 6, 1544–1554. [Google Scholar] [CrossRef]
- Waffler, S.; Kolar, J.W. A Novel Low-Loss Modulation Strategy for High-Power Bidirectional Buck + Boost Converters. IEEE Trans. Power Electron. 2009, 24, 1589–1599. [Google Scholar] [CrossRef]
- Chomsuwan, K.; Prisuwanna, P.; Monyakul, V. Photovoltaic grid-connected inverter using two-switch buck-boost converter. In Proceedings of the Conference Record of the Twenty-Ninth IEEE Photovoltaic Specialists Conference, New Orleans, LA, USA, 22 April 2002. [Google Scholar]
- Kuperman, A.; Aharon, I.; Malki, S.; Kara, A. Design of a Semiactive Battery-Ultracapacitor Hybrid Energy Source. IEEE Trans. Power Electron. 2013, 28, 806–815. [Google Scholar] [CrossRef]
- Oh, C.; Kim, D.; Woo, D.; Sung, W.; Kim, Y.; Lee, B. A High-Efficient Nonisolated Single-Stage On-Board Battery Charger for Electric Vehicles. IEEE Trans. Power Electron. 2013, 28, 5746–5757. [Google Scholar] [CrossRef]
- Sahu, B.; Rincon-Mora, G.A. A low voltage, dynamic, noninverting, synchronous buck-boost converter for portable applications. IEEE Trans. Power Electron. 2004, 19, 443–452. [Google Scholar] [CrossRef]
- Xiao, H.; Xie, S.; Chen, W.; Huang, R. An interleaving double-switch Buck-Boost converter for PV grid-connected inverter. In Proceedings of the 2010 IEEE Energy Conversion Congress and Exposition, Atlanta, GA, USA, 12–16 September 2010. [Google Scholar]
- Chen, J.; Maksimovic, D.; Erickson, R. Buck-boost PWM converters having two independently controlled switches. In Proceedings of the 2001 IEEE 32nd Annual Power Electronics Specialists Conference, Vancouver, BC, Canada, 17–21 June 2001. [Google Scholar]
- Jones, D.C.; Erickson, R.W. A Nonlinear State Machine for Dead Zone Avoidance and Mitigation in a Synchronous Noninverting Buck–Boost Converter. IEEE Trans. Power Electron. 2013, 28, 467–480. [Google Scholar] [CrossRef]
- Hong, X.; Wu, J.; Wei, C. 98.1%-Efficiency Hysteretic-Current-Mode Noninverting Buck–Boost DC-DC Converter with Smooth Mode Transition. IEEE Trans. Power Electron. 2017, 32, 2008–2017. [Google Scholar] [CrossRef]
- Chen, J.; Shen, P.; Hwang, Y. A High-Efficiency Positive Buck–Boost Converter with Mode-Select Circuit and Feed-Forward Techniques. IEEE Trans. Power Electron. 2013, 28, 4240–4247. [Google Scholar] [CrossRef]
- Tsai, C.; Tsai, Y.; Liu, H. A Stable Mode-Transition Technique for a Digitally Controlled Non-Inverting Buck–Boost DC–DC Converter. IEEE Trans. Ind. Electron. 2015, 62, 475–483. [Google Scholar] [CrossRef]
- Lee, Y.; Khaligh, A.; Emadi, A. A Compensation Technique for Smooth Transitions in a Noninverting Buck–Boost Converter. IEEE Trans. Power Electron. 2009, 24, 1002–1015. [Google Scholar] [CrossRef]
- Zhang, N.; Zhang, G.; See, K.W. Systematic Derivation of Dead-Zone Elimination Strategies for the Noninverting Synchronous Buck–Boost Converter. IEEE Trans. Power Electron. 2018, 33, 3497–3508. [Google Scholar] [CrossRef]
- Aharon, I.; Kuperman, A.; Shmilovit, D. Analysis of Dual-Carrier Modulator for Bidirectional Noninverting Buck–Boost Converter. IEEE Trans. Power Electron. 2015, 30, 840–848. [Google Scholar] [CrossRef]
- Aharon, I.; Shmilovitz, D.; Kuperman, A. Robust Output Voltage Control of Multi-Mode Non-Inverting DC-DC Converter. Int. J. Control 2017, 90, 110–120. [Google Scholar] [CrossRef]
- Aharon, I.; Shmilovitz, D.; Kuperman, A. Uncertainty and Disturbance Estimator-Based Controllers Design under Finite Control Bandwidth Constraint. IEEE Trans. Ind. Electron. 2018, 65, 1439–1449. [Google Scholar] [CrossRef]
- Aharon, I.; Shmilovitz, D.; Kuperman, A. Phase Margin Oriented Design and Analysis of UDE-Based Controllers under Actuator Constraints. IEEE Trans. Ind. Electron. 2018, 65, 8133–8141. [Google Scholar] [CrossRef]
- Gao, Z. Active disturbance rejection control: From an enduring idea to an emerging technology. In Proceedings of the 2015 10th International Workshop on Robot Motion and Control (RoMoCo), Poznan, Poland, 24 August 2015. [Google Scholar]
- Gao, Z. Scaling and bandwidth-parameterization based controller tuning. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]
- Wang, W.; Gao, Z. A comparison study of advanced state observer design techniques. In Proceedings of the 2003 American Control Conference, Denver, CO, USA, 4–6 June 2003. [Google Scholar]
- Miklosovic, R.; Radke, A.; Gao, Z. Discrete implementation and generalization of the extended state observer. In Proceedings of the 2006 American Control Conference, Minneapolis, MN, USA, 14–16 June 2006. [Google Scholar]
- Sun, B.; Gao, Z. A DSP-based active disturbance rejection control design for a 1-kW H-bridge DC-DC power converter. IEEE Trans. Ind. Electron. 2005, 52, 1271–1277. [Google Scholar] [CrossRef]
- You, J.; Liao, M.; Chen, H.; Ghasemi, N.; Vilathgamuwa, M. Disturbance Rejection Control Method for Isolated Three-Port Converter with Virtual Damping. Energies 2018, 11, 3204. [Google Scholar] [CrossRef]
- Zhu, B. Introduction of Active Disturbance Rejection Control, 1st ed.; Beihang University Press: Beijing, China, 2017; pp. 42–45. ISBN 987-7-5124-2383-1. [Google Scholar]
- Pavlovic, T.; Bjasic, T.; Ban, Z. Simplified averaged models of DC–DC power converters suitable for controller design ad microgrid simulation. IEEE Trans. Power Electron. 2013, 28, 3266–3275. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Name | Value |
|---|---|---|
| vin | Input DC voltage | 60 V–150 V |
| vo | Nominal output voltage | 100 V |
| L | Inductor | 1 mH |
| C | Filter capacitance | 1100 μH |
| RL | Adjustable load resistor | 10 Ω–100 Ω |
| fs | Switching frequency | 20 kHz |
| Vm | Peak value of carrier wave | 8400 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
You, J.; Fan, W.; Yu, L.; Fu, B.; Liao, M. Disturbance Rejection Control Method of Double-Switch Buck-Boost Converter Using Combined Control Strategy. Energies 2019, 12, 278. https://doi.org/10.3390/en12020278
You J, Fan W, Yu L, Fu B, Liao M. Disturbance Rejection Control Method of Double-Switch Buck-Boost Converter Using Combined Control Strategy. Energies. 2019; 12(2):278. https://doi.org/10.3390/en12020278
Chicago/Turabian StyleYou, Jiang, Weiyan Fan, Lijun Yu, Bin Fu, and Mengyan Liao. 2019. "Disturbance Rejection Control Method of Double-Switch Buck-Boost Converter Using Combined Control Strategy" Energies 12, no. 2: 278. https://doi.org/10.3390/en12020278