Multi-Level Modeling Methodology for Optimal Design of Electric Machines Based on Multi-Disciplinary Design Optimization


Abstract
1. Introduction
2. Modeling Method of Electric Machine for Design and Evaluation
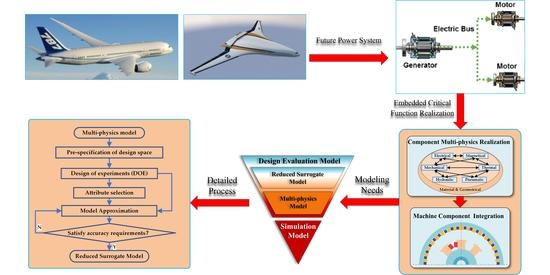
2.1. Modeling Needs Analysis
- The primary-level model handles the design of the machine for the integration of More-electric systems, linking dimensions and characteristics of selected materials and technologies to multi-physical characteristics of components with full consideration of their energy conversion features [29]. Thus, couplings of variables can be illustrated clearly.
- The secondary-level model allows proper simplification of the primary-level multi-physics model, which focuses on the performance evaluation of the system, and should be consistent with the primary-level model.
2.2. Modular Multi-Physics Model
2.3. MDO-Based Model Simplification
3. Modular Multi-Physics Model
3.1. Shaft Model
3.1.1. Multi-Physics Coupled Constraints
3.1.2. Design Goals
3.2. Yoke Model
3.2.1. Multi-Physics Coupled Constraints
3.2.2. Design goals
3.3. Slot Model
3.3.1. Multi-Physics Coupled Constraints
3.3.2. Design Goals
3.4. Air-Gap Model
Multi-Physics Coupled Constraints
3.5. Pole Model
3.5.1. Multi-Physics Coupled Constraints
3.5.2. Design Goals
3.6. Winding Model
3.6.1. Multi-Physics Coupled Constraints
3.6.2. Design Goals
3.7. Integration Model
3.7.1. Components Coupled Constraints
3.7.2. Design Goals
3.8. Summary
3.8.1. Problem Definition
3.8.2. Model Improvements
- The model is restructured and divided into several replaceable modules to illustrate the couplings of components. Thus, other machine types can be evaluated easily just by changes in shape, material, and radial positions of component modules, which also follows the concurrent design concept.
- Design codes, e.g., the wire gauge, shape selection experiences, and empirical formulas are embedded to realize easier designs for system integrators.
- Inputs are well selected according to the insulation requirements, which offer comprehensive links with practical design requirements, whereas penalty coefficients are used to break the closed loops of the design, which simplifies the calculation.
4. Model Simplification
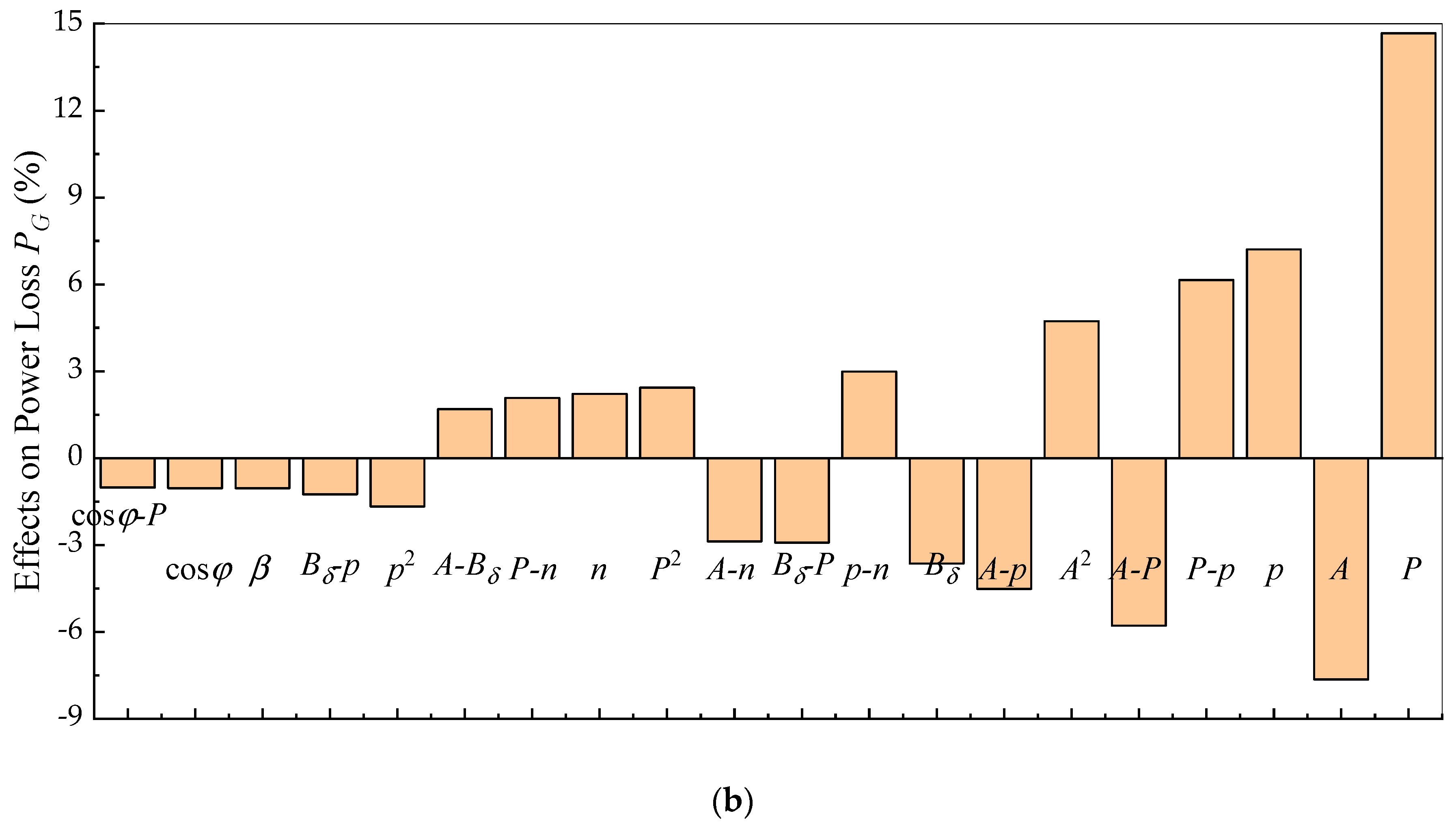
4.1. Sensitivity Analysis
4.2. Model Approximation
5. Analysis
5.1. Verification
5.1.1. Multi-Physics Model Analysis
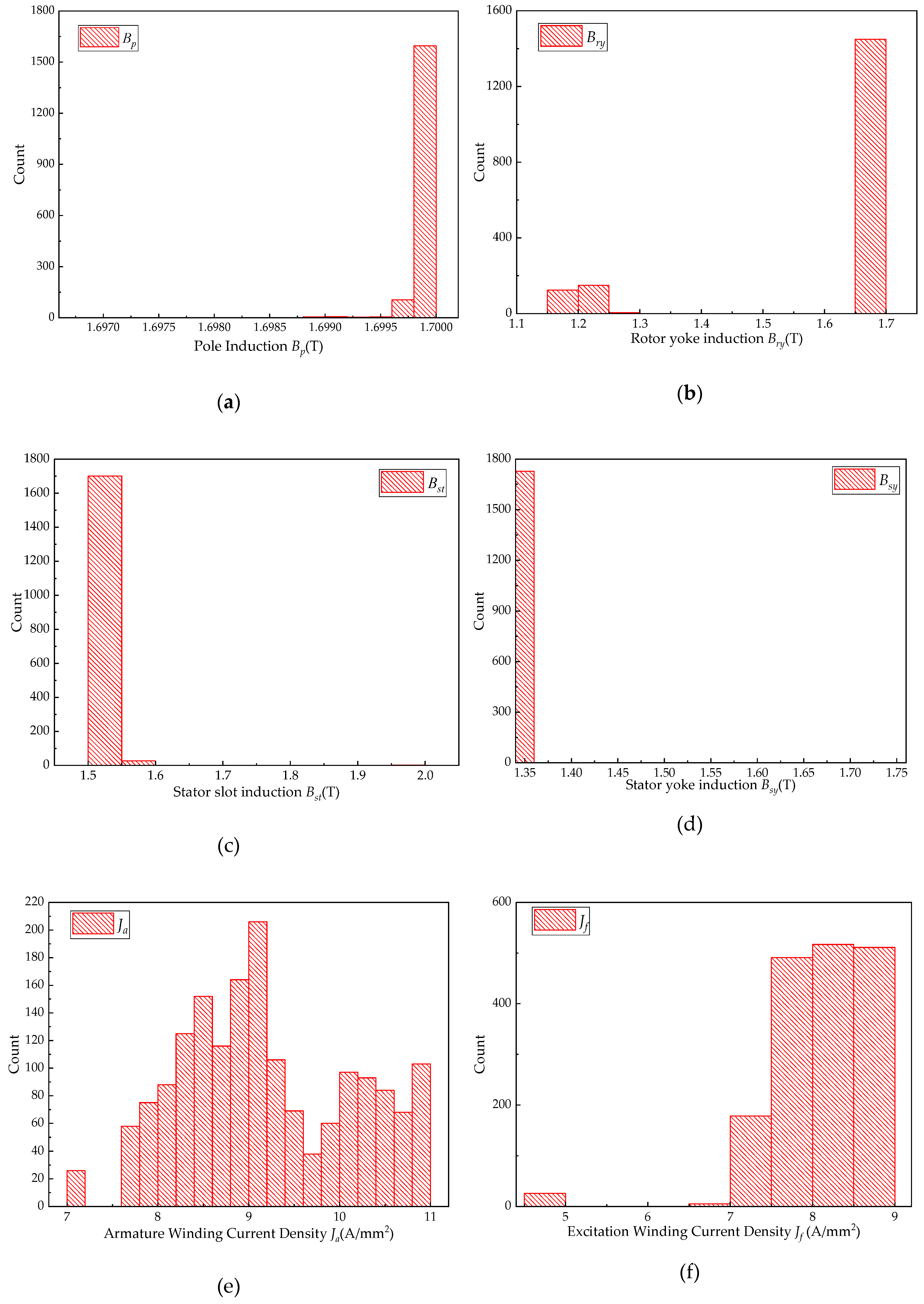
5.1.2. Dimensionality Reduction Analysis
5.1.3. Simplified Model Analysis
5.2. Comparisons
5.2.1. Comparison with the Baseline Model
5.2.2. Comparison with the SL-Based Model
6. Conclusions
- The proposed modular modeling structure of the multi-physics model divides the machine into several replaceable sub-models, enabling the evaluation of different machine types by simply changing sub-models and their integration forms. Design codes are embedded in the model to reduce professional requirements for system integrators and to realize the combination of the principle and practical technologies. Moreover, this modeling method can also be applied to other equipment in the aircraft power system and enables efficient and quick designs with optimization algorithms.
- With the knowledge analysis of the improved multi-physics model, sensitive variables are selected from the multi-physics model as the inputs of the simplified models. The similar results of two-level models indicate that the nesting designs of different levels can be achieved with consistent results. Therefore, models of different levels are associated and consistent in aspects of interface and results, and the proposed modeling framework offers a systematic evaluation tool for designs of different levels.
- Compared with existing models for aircraft power system integration, the proposed simplified models of electrical machines have the advantages of lower-dimensional design space and black-box characteristics without reducing the precision. Both fast and accurate designs can be achieved by the method.
Author Contributions
Funding
Conflicts of Interest
References
- Riu, D.; Sautreuil, M.; Retière, N.; Sename, O. Control and design of DC grids for robust integration of electrical devices. Application to aircraft power systems. Int. J. Electr. Power Energy Syst. 2014, 58, 181–189. [Google Scholar] [CrossRef]
- Berton, J.J.; Kim, H.D.; Singh, R.; Tong, M.T.; Haller, W.J.; Felder, J.L. Turboelectric distributed propulsion benefits on the N3-X vehicle. Aircr. Eng. Aerosp. Technol. 2014, 86, 558–561. [Google Scholar] [CrossRef]
- Mai, T.; Jadun, P.; Logan, J.; McMillan, C.; Muratori, M.; Steinberg, D.; Vimmerstedt, L.; Jones, R.; Haley, B.; Nelson, B. Electrification Futures Study: Scenarios of Electric Technology Adoption and Power Consumption for the United States; Tech. Rep. NREL/TP-6A20-71500; National Renewable Energy Laboratory: Golden, CO, USA, 2018.
- Cao, W.; Mecrow, B.C.; Atkinson, G.J.; Bennett, W.; Atkinson, D.J. Overview of electric motor technologies used for MEA. IEEE Trans. Ind. Electron. 2012, 59, 3523–3531. [Google Scholar] [CrossRef]
- Sadey, D.J.; Csank, J.; Hanlon, P.A.; Jansen, R.H. A generalized power system architecture sizing and analysis framework. In Proceedings of the 2018 AIAA Joint Propulsion Conference, Cincinnati, OH, USA, 1–11 July 2018. [Google Scholar]
- Hanlon, P.; Thomas, G.L.; Csank, J.; Sadey, D.J. A tool for modeling and analysis of electrified aircraft power systems. In Proceedings of the AIAA Propulsion an Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019. [Google Scholar]
- Csank, J.; Sadey, D.J.; Lavelle, T.M.; Garcia, J.; Bergeson, J. Electrical power system sizing within the numerical propulsion system simulation. In Proceedings of the AIAA Propulsion an Energy 2019 Forum, Indianapolis, IN, USA, 19–22 August 2019. [Google Scholar]
- International Council on Systems Engineering. Systems Engineering Handbook: A Guide for System Life Cycle Processes and Activities, 4th ed.; John Wiley and Sons Inc.: San Diego, CA, USA, 2012; ISBN 9781118999400. [Google Scholar]
- Kevin, A.R.; Stephen, E.; Russell, P.; Dimitri, M. Methodologies for modeling and simulation in model-based systems engineering tools. In Proceedings of the AIAA SPACE 2016, Long Beach, CA, USA, 13–16 September 2016. [Google Scholar] [CrossRef]
- Bals, J.; Hofer, G.; Pfeiffer, A.; Schallert, C. Virtual Iron Bird-a Multidisciplinary Modelling and Simulation Plat-Form for New Aircraft System Architectures. In Deutscher Luft-Und Raumfahrkongress; Friedrichshafen, Ed.; German Society for Aeronautics and Astronautics: Bonn, Germany, 2005; pp. 1–9. [Google Scholar]
- Roboam, X.; Sareni, B.; de Andrade, A. More electricity in the air: Toward optimized electrical networks embedded in more-electrical aircraft. IEEE Ind. Electron. Mag. 2012, 6, 6–17. [Google Scholar] [CrossRef]
- de Andrade, A.; Lesage, A.; Sareni, B.; Meynard, T.; Roboam, X.; Ruelland, R.; Couderc, M. Integrated optimal design for power systems of more electrical aircraft. In Proceedings of the International Conference Proceedings on More Electric Aircraft, Bordeaux, France, 20–21 November 2012; pp. 1–8. [Google Scholar]
- Ounis, H.; Sareni, B.; Roboam, X.; de Andrade, A. Multi-level integrated optimal design for power systems of more electric aircraft. Math. Comput. Simul. 2015, 130, 223–235. [Google Scholar] [CrossRef]
- Budinger, M.; Reysset, A.; Halabi, T.E.; Vasiliu, C.; Maré, J.C. Optimal preliminary design of electromechanical actuators. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 226, 243–259. [Google Scholar] [CrossRef]
- Reysset, A. Preliminary Design of Electromechanical Actuators–Development of Tools Dedicated to Technical Specification and Optimal Sizing Sequence Conditioning. Ph. D. Thesis, Department Mechanical Engineering, Université de Toulouse, Toulouse, France, 3 February 2015. [Google Scholar]
- Wen, B.; Zhang, X.; Effah, F. Integrated design by optimization of electrical power systems for more electric aircraft. In Proceedings of the MEA 2015, Toulouse, France, 3–5 February 2015. [Google Scholar]
- Fu, J.; Mare, J.C.; Yu, L.; Fu, Y. Multi-level virtual prototyping of electromechanical actuation system for more electric aircraft. Chin. J. Aeronaut. 2018, 31, 892–913. [Google Scholar] [CrossRef]
- Garriga, A.G.; Govindaraju, P.; Ponnusamy, S.S.; Cimmino, N.; Mainini, L. A modelling framework to support power architecture trade-off studies for more-electric aircraft. Transp. Res. Procedia 2018, 29, 146–156. [Google Scholar] [CrossRef]
- Xue, L.; Wu, S.; Xu, Y.; Ma, D. A simulation-based multi-objective optimization design method for pump-driven electro-hydrostatic actuators. Processes 2019, 7, 274. [Google Scholar] [CrossRef]
- Bazzo, T.D.; Kölzer, J.F.; Carlson, R.; Wurtz, F.; Gerbaud, L. Multiphysics design optimization of a permanent magnet synchronous generator. IEEE Trans. Ind. Electron. 2017, 64, 9815–9823. [Google Scholar] [CrossRef]
- Ostovic, V. Dynamics of Saturated Electric Machines; Springer: New York, NY, USA, 1989; pp. 5–138. ISBN 978-1-4613-8935-4. [Google Scholar]
- Keysan, O.; Mcdonald, A.; Mueller, M. A Direct Drive Permanent Magnet Generator Design for a Tidal Current Turbine (SeaGen); IEMDC: Niagara Falls, ON, Canada; IEEE: New York, NY, USA, 2011. [Google Scholar]
- Ursu, D.; Tutelea, L.; Ionel, D.; Boldea, I. Optimal Design of BLDC Multi-Phase Reluctance Machines (MRM) for Variable Speed Drives; OPTIM & ACEMP: Brasov, Romania; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Bendib, M.; Taib, M.; Mekias, A. Design of Axial Flux Pm Machine for Flywheel Energy Storage System; ICWEAA: Algiers, Algeria; IEEE: New York, NY, USA, 2018. [Google Scholar]
- Staubach, C.; Wulff, J.; Jenau, F. Particle Swarm Based Simplex Optimization Implemented in a Nonlinear, Multiple-Coupled Finite-Element-Model for Stress Grading in Generator end Windings; OPTIM: Brasov, Romania; IEEE: New York, NY, USA, 2012. [Google Scholar]
- Stipetic, S.; Miebach, W.; Zarko, D. Optimization in Design of Electric Machines: Methodology and Workflow; ACEMP, OPTIM & ELECTROMOTION: Side, Turkey; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Saygin, A.; Aksöz, A. Design Optimization for Minimizing Cogging Torque in Axial Flux Permanent Magnet Machines; OPTIM & ACEMP: Brasov, Romania; IEEE: New York, NY, USA, 2017. [Google Scholar]
- Vivier, S.; Friedrich, G. Comparison between single-model and multimodel optimization methods for multiphysical design of electrical machines. IEEE Trans. Ind. Appl. 2018, 54, 1379–1389. [Google Scholar] [CrossRef]
- Sareni, B.; Abdelli, A.; Roboam, X.; Tran, D.H. Model simplification and optimization of a passive wind turbine generator. Renew. Energy 2009, 34, 2640–2650. [Google Scholar] [CrossRef]
- Budinger, M.; Liscouët, J.; Hospital, F.; Maré, J.C. Estimation models for the preliminary design of electro-mechanical actuators. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2012, 226, 243–259. [Google Scholar] [CrossRef]
- Mohamed, F.A.; Koivo, H.N. System modeling and online optimal management of microgrid using multi-objective optimization. In Proceedings of the International Conference on Clean Electrical Power, Capri, Itlay, 21–23 May 2007; IEEE: New York, NY, USA, 2007. [Google Scholar]
- McCarthy, K.; McCarthy, P.; Wu, N.; Alleyne, A.; Koeln, J.; Patnaik, S.; Emo, S.; Cory, J. Model accuracy of variable fidelity vapor cycle system simulations. Sae Tech. Pap. 2014, 2014, 1–13. [Google Scholar] [CrossRef]
- Wang, L.; Dai, Z.H.; Yang, S.S.; Mao, L.; Yan, Y.G. Review of intelligent design of electrified aircraft power system. Acta Aeronaut. Et Astronaut. Sin. 2019, 40, 522405. [Google Scholar] [CrossRef]
- Lei, G.; Liu, C.C.; Guo, Y.G.; Zhu, J.G. Robust multidisciplinary design optimization of PM machines with soft magnetic composite cores for batch production. IEEE Trans. Magn. 2015, 52, 1–4. [Google Scholar] [CrossRef]
- Levi, E. Polyphase Motors: A Direct Approach to Their Design; Wiley: New York, NY, USA, 1984; pp. 131–171. [Google Scholar]
- Silva, R.C.; Li, M.; Rahman, T.; Lowther, D.A. Surrogate-based MOEA/D for electric motor design with scarce function evaluations. IEEE Trans. Magn. 2017, 53, 7400704. [Google Scholar] [CrossRef]
- Bramerdorfer, G.; Zăvoianu, A.C. Surrogate-based multi-objective optimization of electrical machine designs facilitating tolerance analysis. IEEE Trans. Magn. 2017, 53, 8107611. [Google Scholar] [CrossRef]
- Dai, W.J.; Zhang, J.M. Machine Design; Tsinghua University Press: Beijing, China, 2010; pp. 1–2, ISBN ECCE 2015. [Google Scholar]
- International Electrotechnical Commission. Laminations for transformers and inductors-Part 1: Mechanical and electrical characteristics. In IEC 60740-1:2005; International Electrotechnical Commission: Geneva, Switzerland, 2005. [Google Scholar]
- SAE AE-8A System Installation Committee. Wiring Aerospace Vehicle, SAE AS50881F; SAE International: Warrendale, PA, USA, 2015. [Google Scholar]
- International Electrotechnical Commission. Basic Dimensions of Winding Wires, IEC 60182:1984; International Electrotechnical Commission: Geneva, Switzerland, 1984. [Google Scholar]
- Tran, D.H.; Sareni, B.; Roboam, X.; Espanet, C. Integrated optimal design of a passive wind turbine system: An experimental validation. IEEE Trans. Sustain. Energy 2010, 1, 48–56. [Google Scholar] [CrossRef]
- Lim, D.H.; Kim, S.C. Thermal performance of oil spray cooling system for in-wheel motor in electric vehicles. Appl. Therm. Eng. 2014, 63, 577–587. [Google Scholar] [CrossRef]
- Bazzo, T.; Kolzer, J.F.; Carlson, R.; Wurtz, F.; Gerbaud, L. Optimum Design of a High-Efficiency Direct-Drive PMSG; ECCE: Montreal, QC, Canada; IEEE: New York, NY, USA, 2015. [Google Scholar]
- Saari, J. Thermal Analysis of High-Speed Induction Machines. Ph. D. Thesis, Department EE, Helsinki University of Technology, Helsinki, Finland, 30 June 1998. [Google Scholar]
- McKay, M.D.; Beckman, R.J.; Conover, W.J. A comparison of three methods for selecting values of input variables in the analysis of output from a computer code. Technometrics 1979, 21, 239–245. [Google Scholar] [CrossRef]
- Iman, R.L.; Helton, J.C.; Campbell, J.E. An approach to sensitivity analysis of computer models, Part 1. Introduction, input variable selection and preliminary variable assessment. J. Qual. Technol. 1981, 13, 174–183. [Google Scholar] [CrossRef]
- Jin, R.; Chen, W.; Sudjianto, A. An efficient algorithm for constructing optimal design of computer experiments. J. Stat. Plan. Inference 2004, 134, 268–287. [Google Scholar] [CrossRef]
- Hamilton Sundstrand Co. Component Maintenance Manual with Illustrated Parts List–Auxiliary Power Unit Start Generator; Hamilton Sundstrand Co.: Windsor Locks, CT, USA, 2015; Revision 18. [Google Scholar]
- Parker, H. Servomotors NX Series Technical Manual, Edition 03/2017 ed; Parker Hannifin: Longvic Cedex, France, 2017. [Google Scholar]
- Kollmorgen. Synchronous Servomotors Series GOLDLINE™ BH, Technical Description, Installation, Commissioning, Edition 07/2000 ed; Kollmorgen: Radford, VA, USA, 2000. [Google Scholar]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Design Variables | Lower Levels | Upper Levels |
|---|---|---|
| P (kW) | 30 | 300 |
| p | 1 | 6 |
| β | 2/3 | 7/8 |
| cosφ | 0.8 | 0.9 |
| n (r/min) | 1000 | 30,000 |
| λ | 0.6 | 4 |
| ΔT (°C) | 0 | 105 |
| A (A/m) | 2.3 × 104 | 6 × 104 |
| Bp (T) | 1.3 | 1.7 |
| Bry (T) | 1.15 | 1.7 |
| Bst (T) | 1.5 | 2 |
| Bsy (T) | 1.35 | 1.75 |
| Bδ (T) | 0.6 | 1 |
| Ja (A/mm2) | 7 | 11 |
| Jf (A/mm2) | 4.5 | 9 |
| E (V) | 115 | 5000 |
| AJa (A/m∙A/mm2) | 2 × 105 | 5 × 105 |
| Models | Alternative Inputs | |
|---|---|---|
| Before | WG | P, p, A, n, Bδ, β, cosφ, Bp, Bry, Bst, Bsy, Ja, Jf, λ, and E |
| PG | ||
| After | WG | P, p, A, n, Bδ, and β |
| PG | P, p, A, Bδ, n, β, and cosφ | |
| Models | Evaluation Indexes | RBF | RSM |
|---|---|---|---|
| WG | R2 | 0.959 | 0.783 |
| Average Error 1/% | 2.75 | 13.12 | |
| Max Error 1/% | 18.29 | 29.29 | |
| RMSE 2 | 0.06 | 0.16 | |
| PG | R2 | 0.939 | 0.98 |
| Average Error/% | 6.701 | 2.44 | |
| Max Error/% | 14.79 | 11.32 | |
| RMSE | 0.076 | 0.0394 |
| Parameters | Prototype in [29] | FEM in [29] | Multi-Physics Model in [29] | Proposed Simplified Model | Errors of FEM in [29]/% | Errors of Multi-Physics Model in [29]/% | Errors of Proposed Models/% |
|---|---|---|---|---|---|---|---|
| Ra (Ω) | 0.14 | 0.14 | 0.13 | 0.1348 | 0 | 7.14 | 3.71 |
| La (mH) | 1.42 | 1.4 | 1.37 | 1.34 | 1.41 | 3.52 | 5.63 |
| δ (mm) | 1.8 | 1.17 | 1.17 | 1.853 | 35 | 35 | 2.94 |
| lef (mm) | 48.5 | 48.6 | 48.6 | 47.4 | 0.21 | 0.21 | 2.27 |
| Da (mm) | 141 | - | - | 137.6 | - | - | 2.41 |
| Dsy (mm) | 211.3 | - | - | 193.6 | - | - | 8.38 |
| WG (kg) | 9.8 | - | - | 9.04 | - | - | 7.76 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dai, Z.; Wang, L.; Meng, L.; Yang, S.; Mao, L. Multi-Level Modeling Methodology for Optimal Design of Electric Machines Based on Multi-Disciplinary Design Optimization. Energies 2019, 12, 4173. https://doi.org/10.3390/en12214173
Dai Z, Wang L, Meng L, Yang S, Mao L. Multi-Level Modeling Methodology for Optimal Design of Electric Machines Based on Multi-Disciplinary Design Optimization. Energies. 2019; 12(21):4173. https://doi.org/10.3390/en12214173
Chicago/Turabian StyleDai, Zehua, Li Wang, Lexuan Meng, Shanshui Yang, and Ling Mao. 2019. "Multi-Level Modeling Methodology for Optimal Design of Electric Machines Based on Multi-Disciplinary Design Optimization" Energies 12, no. 21: 4173. https://doi.org/10.3390/en12214173
APA StyleDai, Z., Wang, L., Meng, L., Yang, S., & Mao, L. (2019). Multi-Level Modeling Methodology for Optimal Design of Electric Machines Based on Multi-Disciplinary Design Optimization. Energies, 12(21), 4173. https://doi.org/10.3390/en12214173