Modeling a High Concentrator Photovoltaic Module Using Fuzzy Rule-Based Systems

 ,
,  , , and
, , and
Abstract
:
1. Introduction
- (a)
- The use of high-efficiency multi-junction (MJ) solar cells, made of several p-n junctions of semiconductor material with different band gap energies, that are more influenced by changes in the solar spectrum than single-junction solar cells [10].
- (b)
- (c)
- The difficulty of measuring the temperature at which the solar cells are working in an HCPV module; since they are mounted on a substrate surrounded by other peripheral elements, the direct measurement of this temperature is not possible without deleterious the module or the components of the assembly that surround the cells [13,14,15].
- (d)
- The HCPV modules only react to the direct component of the solar radiation (DNI) due to the use of point-focus optical elements. This component of the solar radiation is more variable and difficult to predict than the global irradiance since it is more affected by the existence of clouds and aerosols in the atmosphere [10,16].
2. Related Work
2.1. Models for the Electrical Characterization of HCPV
2.2. Artificial Neural Networks
2.3. HCPV and ANNs
2.4. Application of ANNs to Obtain an HCPV Model
3. Utility of the FRBS for Modeling an HCPV Module
3.1. Fuzzy Rule-Based System
- (a)
- Mamdani FRBSs [37]. In this type of FRBSs, antecedents and consequents are composed of linguistic variables. The rules possess the following form.
- (b)
- Takagi-Sugeno-Kang FRBSs [36]. This model of FRBSs is based on rules in which the antecedent is composed of linguistic variables and the consequent is an analytical function of the input variables. In this case, the rules are as follows:
- (a)
- The choice of the type of FRBS (Mamdani or Takagi-Sugeno-Kant), and the different fuzzy operators that are employed by the inference process.
- (b)
- The generation of the fuzzy rule set. That requires some design tasks, such as
- Selection of the relevant input and output variables.
- Definition of the scale factor, the number of term sets and the membership function for each linguistic variable.
- Derivation of the linguistic rules that will form part of the rule set.
3.1.1. Mamdani Fuzzy Rule-Based Systems
- (a)
- A Knowledge Base (KB), which stores the knowledge about the problem. The KB comprises a Database (DB) and a fuzzy Rule Base (RB). The DB contains the definitions of the fuzzy rules and linguistic labels, and the RB comprises the collection of linguistic rules representing the expert knowledge.
- (b)
- A fuzzy inference engine, that presents the following structure:
- A fuzzification interface, which converts the values of input variables into fuzzy information, for this it assigns grades of membership to each fuzzy set defined for that variable.
- An inference system, which infers fuzzy outputs by employing fuzzy implications and the rules of inference of FL.
- A defuzzification interface, which produces a non-fuzzy output from an inferred fuzzy output. This interface has to aggregate the information provided by the output fuzzy sets and to obtain an output value from them. There are two basic techniques for doing this: Mode B-FITA (first infer, then aggregate) and Mode A-FATI (first aggregate, then infer). The FRBS proposed in this paper uses mode B-FITA because it reduces the computational burden compared to mode A-FATI.
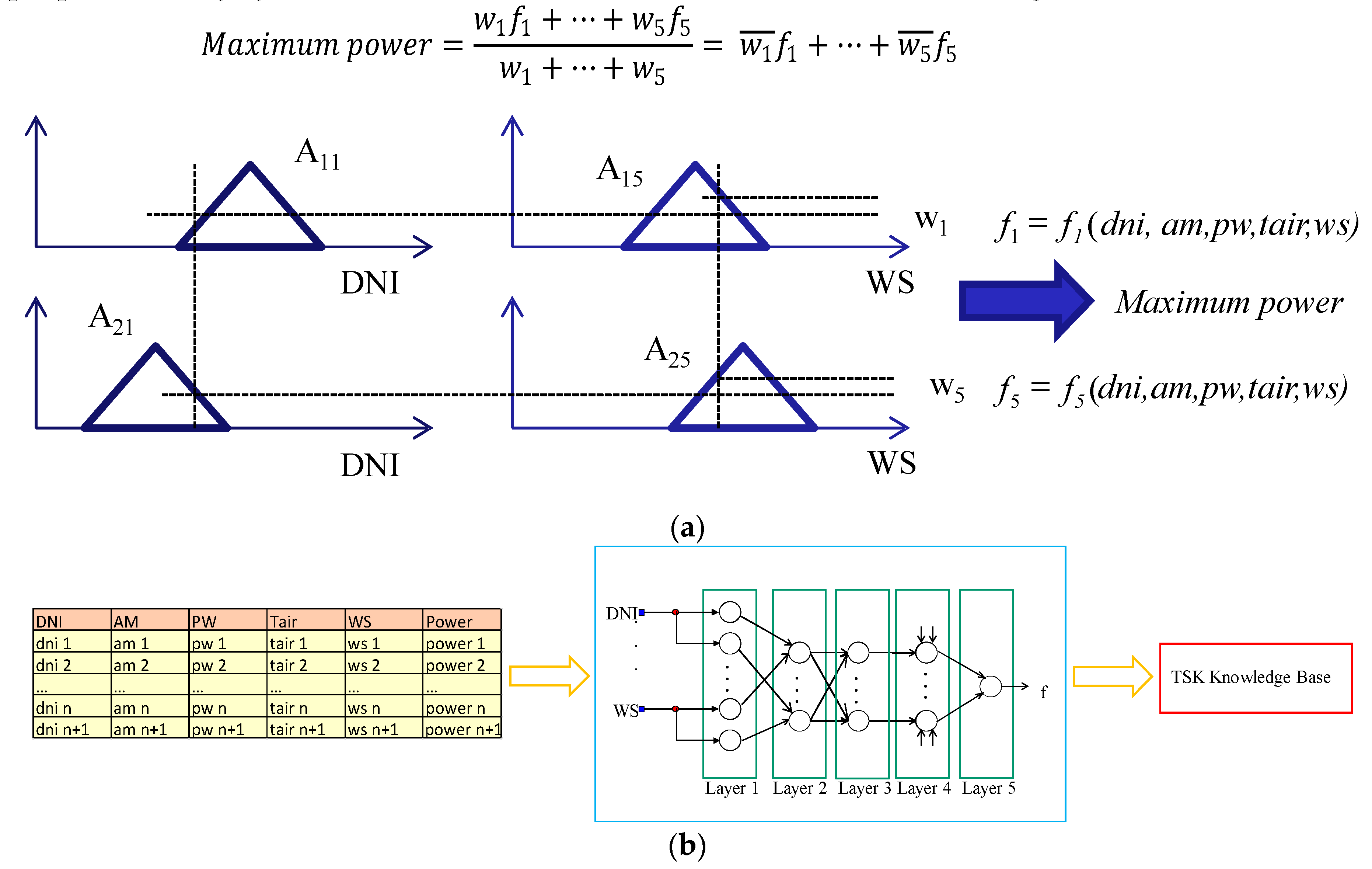
3.1.2. Takagi-Sugeno-Kang Fuzzy Rule-Based Systems
3.2. Learning Methods to Define the Fuzzy Rule Set
3.2.1. ANFIS
- (a)
- Layer 1: Responsible for determining the degree of membership of each input to each of the fuzzy sets (fuzzification of inputs).
- (b)
- Layer 2: The output of this layer is the products obtained by the rules that are activated. Each node symbolizes the firing strength of the rule (wi).
- (c)
- Layer 3: Outputs of this layer are denominated normalized firing strengths (wi). The ith node obtains the ratio of the ith rule´s firing strength to the addition of all rule´s firing strengths.
- (d)
- Layer 4: Outputs are obtained from the consequent parameters of the rules (fi).
- (e)
- Layer 5: Calculates the overall output as the sum of all incoming data.
3.2.2. Ad Hoc Data-Driven Generation Method
- (a)
- They are based on working with an input-output data set.
- (b)
- They consider a previous definition of the database, composed of the output and input primary fuzzy partitions.
- (c)
- The generation of the linguistic rules is guided by the covering criteria of the data in the example set.
- (d)
- The learning mechanism is not based on search techniques or any well-known optimization; it is specifically developed for this purpose.
- (a)
- Consider a fuzzy partition of the variable space.
- (b)
- Generate a candidate linguistic rule set. This set will be composed by the rules best covering each example included in the input-output data set.
- (c)
- Assign an importance degree to each rule. This will be obtained by computing the covering value of the rule.
- (d)
- Obtain a final RB from the candidate linguistic rule set, by selecting the rule with the highest importance degree in each group.
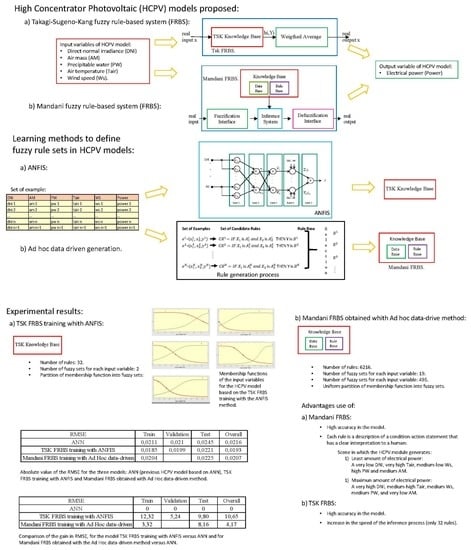
4. Proposed Methods to Obtain an HCPV Model
4.1. Application of ANFIS to Train a TSK FRBS to Obtain an HCPV Model
- (a)
- The five variables mentioned above as inputs: direct-normal irradiance (DNI), wind speed (Ws), air temperature (Tair), precipitable water (PW), and air mass (AM), each with two Gaussian fuzzy sets.
- (b)
- The output variables as linear functions: maximum power.
- (c)
- A training algorithm based on back-propagation.
4.2. Application of Ad Hoc Data-Driven Methodology to Obtain an HCPV Model
- (a)
- A fuzzy partition of the input and output variable space is created. Over all of the five input variables, we have applied a uniform partition composed of 19 fuzzy sets, and over the output variable we have applied a uniform partition with 495 fuzzy sets. Based on these values, we have generated a partition of the five-dimensional space that is composed of 195 subspaces or regions.
- (b)
- Candidate rules are generated in each fuzzy input subspace. For each example of the training set (which is composed of 8926 examples) contained in each subspace, a fuzzy rule is proposed. All of these rules have the same antecedent and differ in their consequents.
- (c)
- Each rule is assigned an importance degree, which is obtained by computing the covering value of the rule in its subspace [42].
- (d)
- Select the rule with the highest importance degree in each group or subspace. The algorithm generated a KB with 6216 different rules.
5. Experimental Results
- (a)
- TSK FRBS training with ANFIS.
- (b)
- Mamdani FRBS obtained with the Ad Hoc data-driven method.
- (a)
- A training set: the learning method is trained with this set in the classical way. It includes 33% of the examples.
- (b)
- A validation set: each time you complete a training iteration, this set is used to determine whether you can stop training. The goal is to avoid overtraining. This set contains 33% of the examples.
- (c)
- A test set to discern the goodness of the process. This set contains 33% of the examples.
- (a)
- A training set, which includes 80% of the examples.
- (b)
- A test set, which contains 20% of the examples.
- (a)
- For TSK, FRBS training with ANFIS:
- Number of rules: 32.
- Number of fuzzy sets for each input variable: 2.
- The partition of the membership functions into the fuzzy sets of input variables is shown in Figure 7. From the observation of the captured data and the membership functions of the two fuzzy sets, for each of the atmospheric variables represented in Figure 7, the conclusion can be drawn that the crossing point of the two fuzzy sets has been chosen so that the number of samples is approximately equal to right and left of said point. Therefore, the high and low fuzzy sets will cover approximately the same number of samples, half of the total number of samples captured. This distribution of the membership functions, which responds to the density of the samples captured, as well as the choice of the initial and final values of the height of the fuzzy sets and the slope of the curve that defines them, allows to have a number of very reduced rules, without a decrease in model accuracy.
- (b)
- For Mamdani, FRBS obtained with the Ad Hoc data-driven method:
- Number of rules: 6216.
- Number of fuzzy sets for each input variable: 19.
- Number of fuzzy sets for each output variable: 495.
- Uniform partition of the membership functions into the fuzzy sets of output and input variables.
- (a)
- An improvement in the RMSE and R2 of results obtained with TSK FRBS training with ANFIS and with Mamdani FRBS using the Ad Hoc data-driven method compared with the results obtained using ANN.
- (b)
- An improvement in the RMSE and R2 of the results obtained with TSK FRBS training with ANFIS compared with the results obtained using Mamdani FRBS with the Ad Hoc data-driven method.
- (c)
- A strong decrease in the number of rules in the knowledge base obtained for TSK FRBS compared with that obtained for Mamdani FRBS. This simplicity results in an increase in the speed of the inference process.
6. Conclusions
- (a)
- They only need simple outdoor measurements.
- (b)
- They do not need an expensive experimental system.
- (c)
- They are valid for any climatic conditions.
- (d)
- They do not need any specific simulation software.
- (e)
- They can be applied to the modelling of any model of HCPV module.
- (a)
- The use of an HCPV model obtained using TSK FRBS trained with ANFIS produced an improvement in the model accuracy compared to the use of the model obtained using ANN.
- (b)
- The use of an HCPV model obtained using Mamdani FRBS with an Ad Hoc data-driven method produced an improvement in the model accuracy compared to the use of the model obtained using ANN.
- (c)
- The use of an HCPV model obtained using TSK FRBS trained with ANFIS produced an improvement in the model accuracy compared to the use of the model obtained using Mamdani FRBS with an Ad Hoc data-driven method.
- (d)
- The use of an HCPV model obtained using Mamdani FRBS with an Ad Hoc data-driven method allowed for the deduction of the relationship between the input and output variables. However, the other HCPV models did not provide information on the modeled system that was interpretable by a human.
- (a)
- In Mamdani FRBS modelling:
- To build a non-uniform partition of the membership functions in the input variables, in order to minimize the number of linguistics rules in the KB obtained by applying Ad Hoc data-driven method.
- To use other learning methods, as genetic algorithms, in order to obtain good KB.
- (b)
- In TSK FRBS trained with ANFIS modelling: to increase the number of fuzzy sets in the partition of the membership functions of the input variables, in order to increase its accuracy.
- (c)
- In FRBS (Mamdani and TSK) modelling: to increase the number of input variables, with new atmospheric variables, in order to obtain HCPV models with higher accuracy.
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Eduardo, F.; Pérez-Higueras, P.; Garcia Loureiro, A.J.; Vidal, P.G. Outdoor evaluation of concentrator photovoltaic systems modules from different manufacturers: First results and steps. Prog. Photovolt. Res. Appl. 2013, 21, 693–701. [Google Scholar] [CrossRef]
- Siefer, G.; Abbot, P.; Baur, C.; Schleg, T. Determination of the temperature coefficients of various IIIeV solar cells. In Proceedings of the 20th European Photovoltaic Solar Energy Conference, Barcelona, Spain, 6–10 June 2005. [Google Scholar]
- Siefer, G.; Baur, C.; Meusel, M.; Dimroth, F.; Bett, A.W.; Warta, W. Influence of the simulator spectrum on the calibration of multi-junction solar cells under concentration. In Proceedings of the Conference Record of the Twenty-Ninth IEEE Photovoltaic Specialists Conference, New Orleans, LA, USA, 19–24 May 2002; pp. 836–839. [Google Scholar]
- Fernández, E.F.; Loureiro, A.J.G.; Higueras, P.J.P.; Siefer, G. Monolithic III–V triple-junction solar cells under different temperatures and spectra. In Proceedings of the 8th Spanish Conference on Electron Devices, Palma de Mallorca, Spain, 8–11 February 2011. [Google Scholar]
- Siefer, G.; Almonacid, F.; Garcı, A.J.; Ferna, E.F. A two subcell equivalent solar cell model for III–V triple junction solar cells under spectrum and temperature variations. Sol. Energy 2013, 92, 221–229. [Google Scholar] [CrossRef]
- Siefer, G.; Bett, A. Analysis of temperature coefficients for III–V multi-junction concentrator cells. Prog. Photovolt. Res. 2014. [Google Scholar] [CrossRef]
- Fernández, E.F.; Siefer, G.; Schachtner, M.; García Loureiro, A.J.; Pérez-Higueras, P. Temperature coefficients of monolithic III–V triple-junction solar cells under different spectra and irradiance levels. AIP Conf. Proc. 2012, 1477, 189–193. [Google Scholar]
- Soria-moya, A.; Cruz, F.A.; Fern, E.F.; Rodrigo, P.; Mallick, T.K.; Pedro, P. Performance Analysis of Models for Calculating the Maximum Power of High Concentrator Photovoltaic Modules. IEEE J. 2015, 5, 947–955. [Google Scholar] [CrossRef]
- Fernández, E.F.; Almonacid, F.; Mallick, T.K.; Pérez-Higueras, P. Analytical modelling of high concentrator photovoltaic modules based on atmospheric parameters. Int. J. Photoenergy 2015, 2015. [Google Scholar] [CrossRef]
- Fernández, E.F.; Soria-Moya, A.; Almonacid, F.; Aguilera, J. Comparative assessment of the spectral impact on the energy yield of high concentrator and conventional photovoltaic technology. Sol. Energy Mater. Sol. Cells 2016, 147, 185–197. [Google Scholar] [CrossRef]
- Fernández, E.F.; Almonacid, F.; Ruiz-Arias, J.A.; Soria-Moya, A. Analysis of the spectral variations on the performance of high concentrator photovoltaic modules operating under different real climate conditions. Sol. Energy Mater. Sol. Cells 2014, 127, 179–187. [Google Scholar] [CrossRef]
- Shanks, K.; Senthilarasu, S.; Mallick, T.K. Optics for concentrating photovoltaics: Trends, limits and opportunities for materials and design. Renew. Sustain. Energy Rev. 2016, 60, 394–407. [Google Scholar] [CrossRef]
- Fernández, E.F.; Almonacid, F.; Rodrigo, P.; Pérez-Higueras, P. Calculation of the cell temperature of a high concentrator photovoltaic (HCPV) module: A study and comparison of different methods. Sol. Energy Mater. Sol. Cells 2014, 121, 144–151. [Google Scholar] [CrossRef]
- Rodrigo, P.; Fernández, E.; Almonacid, F.; Pérez-Higueras, P.J. Review of methods for the calculation of cell temperature in high concentration photovoltaic modules for electrical characterization. Renew. Sustain. Energy Rev. 2014, 38, 478–488. [Google Scholar] [CrossRef]
- Almonacid, F.; Pérez-Higueras, P.J.; Fernández, E.F.; Rodrigo, P. Relation between the cell temperature of a HCPV module and atmospheric parameters. Sol. Energy Mater. Sol. Cells 2012, 105, 322–327. [Google Scholar] [CrossRef]
- Ruiz-Arias, J.A.; Quesada-Ruiz, S.; Fernández, E.F.; Gueymard, C.A. Optimal combination of gridded and ground-observed solar radiation data for regional solar resource assessment. Sol. Energy 2015, 112, 411–424. [Google Scholar] [CrossRef]
- Rodrigo, P.; Fernández, E.; Almonacid, F.; Pérez-Higueras, P.J. Models for the electrical characterization of high concentration photovoltaic cells and modules: A review. Renew. Sustain. Energy Rev. 2013, 26, 752–760. [Google Scholar] [CrossRef]
- ASTM International. Standard Test Method for Rating Electrical Performance of Concentrator Terrestrial Photovoltaic Modules and Systems Under Natural Sunlight; E2527-09; ASTM International: West Conshohocken, PA, USA, 2009. [Google Scholar]
- Peharz, G.; Ferrer Rodríguez, J.P.; Siefer, G.; Bett, A.W. A method for using CPV modules as temperature sensors and its application to rating procedures. Sol. Energy Mater. Sol. Cells 2011, 95, 2734–2744. [Google Scholar] [CrossRef]
- King, D.L.; Boyson, W.E.; Kratochvil, J.A. Photovoltaic Array Performance Model; Paper nr. SAND2004-3844; Sandia National Laboratories: Albuquerque, NM, USA; Livermore, CA, USA, 2004.
- Whitaker, C.M.; Townsend, T.U.; Newmiller, J.D.; King, D.L.; Boyson, W.E.; Kratochvil, J.A.; Collier, D.E.; Osborn, D.E. Application and validation of a new PV performance characterization method. In Proceedings of the Conference Record of the Twenty Sixth IEEE Photovoltaic Specialists Conference, Anaheim, CA, USA, 29 September–3 October 1997; pp. 1253–1256. [Google Scholar] [CrossRef]
- Gerstmaier, T.; Van Riesen, S.; Gombert, A.; Mermoud, A.; Lejeune, T.; Duminil, E. Software modeling of FLATCON© CPV systems. AIP Conf. Proc. 2010, 1277, 183–186. [Google Scholar]
- Nishioka, K.; Takamoto, T.; Agui, T.; Kaneiwa, M. Annual output estimation of concentrator photovoltaic systems using high-efficiency InGaP/InGaAs/Ge triple-junction solar cells based on experimental solar cell’s. Sol. Energy Mater. 2006, 90, 57–67. [Google Scholar] [CrossRef]
- Aronova, E.S.; Grilikhes, V.A.; Shvarts, M.Z.; Timoshina, N.H. On correct estimation of hourly power output of solar photovoltaic installations with MJ SCs and sunlight concentrators. In Proceedings of the Conference Record of the IEEE Photovoltaic Specialists Conference, San Diego, CA, USA, 11–16 May 2008. [Google Scholar]
- Kinsey, G.S.; Stone, K.; Garboushian, V. Energy prediction of Amonix solar power plants. Proc. SPIE 2010, 7769, 77690B. [Google Scholar] [CrossRef]
- Verlinden, P.J.; Lasich, J.B. Energy rating of Concentrator PV systems using multi-junction III–V solar cells. In Proceedings of the 2008 33rd IEEE Photovoltaic Specialists Conference, San Diego, CA, USA, 11–16 May 2018; pp. 1–6. [Google Scholar] [CrossRef]
- Martínez, M.; Antón, I.S. Prediction of PV concentrators energy production: Influence of wind in the cooling mechanisms. First steps. In Proceedings of the 4th International Conference on Solar Concentrators for the Generation of Electricity or Hydrogen, Scottsdale, AR, USA, 1–5 May 2007. [Google Scholar]
- Chan, N.L.A.; Young, T.B.; Brindley, H.E.; Ekins-Daukes, N.J.; Araki, K.; Kemmoku, Y.; Yamaguchi, M. Validation of energy prediction method for a concentrator photovoltaic module in Toyohashi Japan. Prog. Photovolt. Res. Appl. 2013, 21, 1598–1610. [Google Scholar] [CrossRef]
- Almonacid, F.; Fernández, E.F.; Rodrigo, P.; Pérez-Higueras, P.J.; Rus-Casas, C. Estimating the maximum power of a High Concentrator Photovoltaic (HCPV) module using an Artificial Neural Network. Energy 2013, 53, 165–172. [Google Scholar] [CrossRef]
- Steiner, M.; Siefer, G.; Hornung, T.; Peharz, G.; Bett, A.W. YieldOpt, a model to predict the power output and energy yield for concentrating photovoltaic modules. Prog. Photovolt. Res. Appl. 2015, 23, 385–397. [Google Scholar] [CrossRef]
- Almonacid, F.; Mellit, A.; Kalogirou, S. Applications of Anns in the Field of the Hcpv Technology. High Conc. Photovolt. 2015, 190, 333–351. [Google Scholar]
- Cordón, Ó.; Herrera, F.; Hoffmann, F.; MAgdalena, L. Genetic Fuzzy Systems: Evolutionary Tunning and Learning of Fuzzy Knowledge Bases; World Scientific: Singapore, 2001; Volume 141, ISBN 9810240163. [Google Scholar]
- Duckstein, L.; Bardossy, A. Fuzzy Rule-Based Modeling with Applications to Geophysical, Biological, and Engineering Systems; CRC Press: Boca Raton, FL, USA, 1995; Volume 8. [Google Scholar]
- Pedrycz, W. Fuzzy Modelling: Paradigms and Practice; Springer: Berlin/Heidelberg, Germany, 1996; ISBN ISBN-13:978-1-4612-8589-2. [Google Scholar]
- Sugeno, M.; Yasukawa, T. A Fuzzy-Logic-Based Approach to Qualitative Modeling. IEEE Trans. Fuzzy Syst. 1993, 1, 7–31. [Google Scholar] [CrossRef]
- Takagi, T.; Sugeno, M. Fuzzy Identification of Systems and Its Applications to Modeling and Control. IEEE Trans. Syst. Man Cybern. 1985, 15, 116–132. [Google Scholar] [CrossRef]
- Mamdani, E. Application of fuzzy algorithms for control of simple dynamic plant. Proc. Inst. Electr. Eng. 1974, 121, 1585. [Google Scholar] [CrossRef]
- Mamdani, E.; Assilian, S. An experiment in linguistic synthesis with a fuzzy logic controller. Int. J. Man Mach. Stud. 1975, 7, 1–13. [Google Scholar] [CrossRef]
- Jang, J.S.R. ANFIS: Adaptive-Network-Based Fuzzy Inference System. IEEE Trans. Syst. Man Cybern. 1993, 23, 665–685. [Google Scholar] [CrossRef]
- Cordón, O.; Herrera, F. A proposal for improving the accuracy of linguistic modeling. IEEE Trans. Fuzzy Syst. 2000, 8, 335–344. [Google Scholar] [CrossRef]
- Wang, L.; Mendel, J. Generating fuzzy rules by learning from examples. IEEE Trans. Syst. Man 1992, 22, 1414–1427. [Google Scholar] [CrossRef]
- Casillas, J.; Cordón, O.; Herrera, F. COR: A methodology to improve ad hoc data-driven linguistic rule learning methods by inducing cooperation among rules. IEEE Trans. Syst. Man Cybern. Part B Cybern. 2002, 32, 526–537. [Google Scholar] [CrossRef]
- Pérez-Higueras, P.; Fernández, E.F. High Concentrator Photovoltaics: Fundamentals, Engineering and Power Plants; Green Energy and Technology; Springer International Publishing: Berlin/Heidelberg, Germany, 2015; ISBN 9783319150390. [Google Scholar]
- Hunt, K.; Sbarbaro, D.; Żbikowski, R.; Gawthrop, P. Neural networks for control systems—A survey. Automatica 1992, 28, 1083–1112. [Google Scholar] [CrossRef]
- Patra, J.C.; Maskell, D.L. Estimation of dual-junction solar cell characteristics using neural networks. In Proceedings of the 2010 35th IEEE Photovoltaic Specialists Conference, Honolulu, HI, USA, 20–25 June 2010; pp. 002709–002713. [Google Scholar] [CrossRef]
- Patra, J. Neural network-based model for dual-junction solar cells. Prog. Photovolt. Res. 2011, 19, 33–44. [Google Scholar] [CrossRef]
- Patra, J. Chebyshev neural network-based model for dual-junction solar cells. IEEE Trans. Energy Convers. 2011. [Google Scholar] [CrossRef]
- Patra, J.C.; Maskell, D.L. Modeling of multi-junction solar cells for estimation of EQE under influence of charged particles using artificial neural networks. Renew. Energy 2012, 44, 7–16. [Google Scholar] [CrossRef]
- Fernández, E.F.; Almonacid, F.; Garcia-Loureiro, A.J. Multi-junction solar cells electrical characterization by neuronal networks under different irradiance, spectrum and cell temperature. Energy 2015, 90, 846–856. [Google Scholar] [CrossRef]
- Fernández, E.F.; Almonacid, F. Spectrally corrected direct normal irradiance based on artificial neural networks for high concentrator photovoltaic applications. Energy 2014, 74, 941–949. [Google Scholar] [CrossRef]
- Fernández, E.F.; Almonacid, F. A new procedure for estimating the cell temperature of a high concentrator photovoltaic grid connected system based on atmospheric parameters. Energy Convers. Manag. 2015, 103, 1031–1039. [Google Scholar] [CrossRef]
- Rivera, A.J.J.; García-domingo, B.; del Jesus, M.J.; Aguilera, J.; Jesus, M.J.; Aguilera, J.; del Jesus, M.J.; Aguilera, J. Characterization of Concentrating Photovoltaic modules by cooperative competitive Radial Basis Function Networks. Expert Syst. Appl. 2013, 40, 1599–1608. [Google Scholar] [CrossRef]
- Almonacid, F.; Fernández, E.F.; Mallick, T.K.; Pérez-Higueras, P.J. High concentrator photovoltaic module simulation by neuronal networks using spectrally corrected direct normal irradiance and cell temperature. Energy 2015, 84, 336–343. [Google Scholar] [CrossRef]
- García-Domingo, B.; Piliougine, M.; Elizondo, D.; Aguilera, J. CPV module electric characterisation by artificial neural networks. Renew. Energy 2015, 78, 173–181. [Google Scholar] [CrossRef]
- Almonacid, F.; Rus, C.; Hontoria, L.; Fuentes, M.; Nofuentes, G. Characterisation of Si-crystalline PV modules by artificial neural networks. Renew. Energy 2009, 34, 941–949. [Google Scholar] [CrossRef]
- Almonacid, F.; Rus, C.; Pérez, P.; Hontoria, L. Estimation of the energy of a PV generator using artificial neural network. Renew. Energy 2009, 34, 2743–2750. [Google Scholar] [CrossRef]
- Almonacid, F.; Rus, C.; Hontoria, L.; Muñoz, F. Characterisation of PV CIS module by artificial neural networks. A comparative study with other methods. Renew. Energy 2010, 35, 973–980. [Google Scholar] [CrossRef]
- Almonacid, F.; Rus, C.; Pérez-Higueras, P.; Hontoria, L. Calculation of the energy provided by a PV generator. Comparative study: Conventional methods vs. artificial neural networks. Energy 2011, 36, 375–384. [Google Scholar] [CrossRef]
- Almonacid, F.; Rodrigo, P.; Hontoria, L. Generation of ambient temperature hourly time series for some Spanish locations by artificial neural networks. Renew. Energy 2013, 51, 285–291. [Google Scholar] [CrossRef]
- Lee, C.D.; Huang, H.C.; Yeh, H.Y. The development of sun-tracking system using image processing. Sensors (Switzerland) 2013, 13, 5448–5459. [Google Scholar] [CrossRef] [PubMed]
- Alata, M.; Al-Nimr, M.; Qaroush, Y. Developing a multipurpose sun tracking system using fuzzy control. Energy Convers. Manag. 2005, 46, 1229–1245. [Google Scholar] [CrossRef]
- Choi, J.S.; Kim, D.Y.; Park, K.T.; Choi, C.H.; Chung, D.H. Design of fuzzy controller based on PC for solar tracking system. In Proceedings of the ICSMA 2008—International Conference on Smart Manufacturing Application, Gyeonggi-do, Korea, 9–11 April 2008; pp. 508–513. [Google Scholar]
- Taherbaneh, M.; Fard, H.G.; Rezaie, A.H.; Karbasian, S. Combination of fuzzy-based maximum power point tracker and sun tracker for deployable solar panels in photovoltaic systems. In Proceedings of the IEEE International Conference on Fuzzy Systems, London, UK, 23–26 July 2007; pp. 1–6. [Google Scholar]
- Yousef, H. Design and implementation of a fuzzy logic computer-controlled sun tracking system. In Proceedings of the IEEE International Symposium on Industrial Electronics (Cat. No.99TH8465), Bled, Slovenia, 12–16 July 1999; Volume 3, pp. 1030–1034. [Google Scholar] [CrossRef]
- Yeh, H.-Y.; Lee, C.-D. The Logic-Based Supervisor Control for Sun-Tracking System of 1 MW HCPV Demo Plant: Study Case. Appl. Sci. 2012, 2, 100–113. [Google Scholar] [CrossRef]
- Chi, Z.; Yan, H.; Pham, T. Fuzzy Algorithms: With Applications to Image Processing and Pattern Recognition; World Scientific: Singapore, 1996. [Google Scholar]
- Hirota, K. Industrial Applications of Fuzzy Technology; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- Alcalá, R.; Casillas, J.; Cordón, O.; Herrera, F.; Zwir, S.J.I. Techniques for Learning and Tuning Fuzzy Rule-Based Systems for Linguistic Modeling and their Application. Available online: https://www.researchgate.net/publication/239667434_Techniques_for_Learning_and_Tuning_Fuzzy_Rule-Based_Systems_for_Linguistic_Modeling_and_their_Application_E (accessed on 30 January 2019).
- Zadeh, A.L. Fuzzy Sets. Inf. Control 1965, 8, 338–353. [Google Scholar] [CrossRef]
- Delgado, M.; Gómez-Skarmeta, A.F.; Martín, F. A fuzzy clustering-based rapid prototyping for fuzzy rule-based modeling. IEEE Trans. Fuzzy Syst. 1997, 5, 223–233. [Google Scholar] [CrossRef]
- Yoshinari, Y.; Pedrycz, W.; Hirota, K. Construction of fuzzy models through clustering techniques. Fuzzy Sets Syst. 1993, 54, 157–165. [Google Scholar] [CrossRef]
- Cordon, O.; Herrera, F. A General Study on Genetic Fuzzy Systems. Available online: https://sci2s.ugr.es/sites/default/files/ficherosPublicaciones/0160_gfs-1995-33-57.pdf (accessed on 30 January 2019).
- Cordón, O.; Herrera, F.; Lozano, M. A classified review on the combination fuzzy logic-genetic algorithms bibliography: 1989–1995. In Genetic Algorithms and Fuzzy Logic Systems. Soft Computing Perspectives; World Scientific: Singapore, 1997; pp. 209–241. [Google Scholar]
- Muñoz-Expósito, J.E.; García-Galán, S.; Ruiz-Reyes, N.; Vera-Candeas, P. Adaptive network-based fuzzy inference system vs. other classification algorithms for warped LPC-based speech/music discrimination. Eng. Appl. Artif. Intell. 2007, 20, 783–793. [Google Scholar] [CrossRef]
- Piri, J.; Kisi, O. Modelling solar radiation reached to the Earth using ANFIS, NN-ARX, and empirical models (Case studies: Zahedan and Bojnurd stations). J. Atmos. Solar-Terrestrial Phys. 2015, 123, 39–47. [Google Scholar] [CrossRef]
- Prasad, K.; Gorai, A.K.; Goyal, P. Development of ANFIS models for air quality forecasting and input optimization for reducing the computational cost and time. Atmos. Environ. 2016, 128, 246–262. [Google Scholar] [CrossRef]
- Kharb, R.K.; Shimi, S.; Chatterji, S.; Ansari, M.F. Modeling of solar PV module and maximum power point tracking using ANFIS. Renew. Sustain. Energy Rev. 2014, 33, 602–612. [Google Scholar] [CrossRef]
- Najah, A.; El-Shafie, A.; Karim, O.A.; El-Shafie, A.H. Performance of ANFIS versus MLP-NN dissolved oxygen prediction models in water quality monitoring. Environ. Sci. Pollut. Res. 2014, 21, 1658–1670. [Google Scholar] [CrossRef]
- Driankov, D.; Hellendoorn, H.; Reinfrank, M. An Introduction to Fuzzy Control; Springer: Berlin/Heidelberg, Germany, 1993. [Google Scholar]
- MODIS Daily Level-3 Data. Available online: http://gdata1.sci.gsfc.nasa.gov/daac-bin/G3/gui.cgi?instance_id=MODIS_DAILY_L3 (accessed on 24 October 2014).











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Electrical Characteristics | Value |
|---|---|
| Short-circuit Current (Isc) | 5.30 A |
| Open-circuit Voltage (Voc) | 57.28 V |
| Maximum Current (Ippm) | 4.85 A |
| Maximum Voltage (Vppm) | 47.62 V |
| Maximum Power (Pmax) | 230.85 W |
| NRMSE (%) | Train | Validation | Test | Overall |
|---|---|---|---|---|
| ANN | 2.11 | 2.1 | 2.45 | 2.16 |
| TSK FRBS training with ANFIS | 1.85 | 1.99 | 2.21 | 1.93 |
| Mamdani FRBS training with Ad Hoc data-driven | 2.04 | 2.25 | 2.07 |
| Gain in NRMSE | Train | Validation | Test | Overall |
|---|---|---|---|---|
| ANN | 0 | 0 | 0 | 0 |
| TSK FRBS training with ANFIS | 12.32 | 5.24 | 9.80 | 10.65 |
| Mamdani FRBS training with Ad Hoc data-driven | 3.32 | 8.16 | 4.17 |
| Execution Time (units) | Training (h) | Validation (s) | Test (s) |
|---|---|---|---|
| ANN | 1/60 | 2 | 2 |
| TSK FRBS training with ANFIS | 4 | 2 | 2 |
| Mamdani FRBS training with Ad Hoc data-driven | 216 | 2 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Gadeo-Martos, M.A.; Yuste-Delgado, A.J.; Almonacid Cruz, F.; Fernandez-Prieto, J.-A.; Canada-Bago, J. Modeling a High Concentrator Photovoltaic Module Using Fuzzy Rule-Based Systems. Energies 2019, 12, 567. https://doi.org/10.3390/en12030567
Gadeo-Martos MA, Yuste-Delgado AJ, Almonacid Cruz F, Fernandez-Prieto J-A, Canada-Bago J. Modeling a High Concentrator Photovoltaic Module Using Fuzzy Rule-Based Systems. Energies. 2019; 12(3):567. https://doi.org/10.3390/en12030567
Chicago/Turabian StyleGadeo-Martos, Manuel Angel, Antonio Jesús Yuste-Delgado, Florencia Almonacid Cruz, Jose-Angel Fernandez-Prieto, and Joaquin Canada-Bago. 2019. "Modeling a High Concentrator Photovoltaic Module Using Fuzzy Rule-Based Systems" Energies 12, no. 3: 567. https://doi.org/10.3390/en12030567