Integrated Approach Based on Dual Extended Kalman Filter and Multivariate Autoregressive Model for Predicting Battery Capacity Using Health Indicator and SOC/SOH


Abstract
:
1. Introduction
2. Literature Review
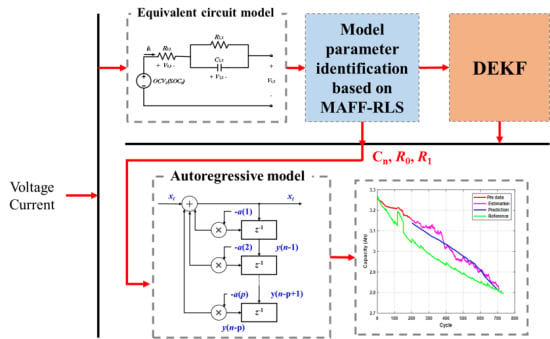
3. Methodologies
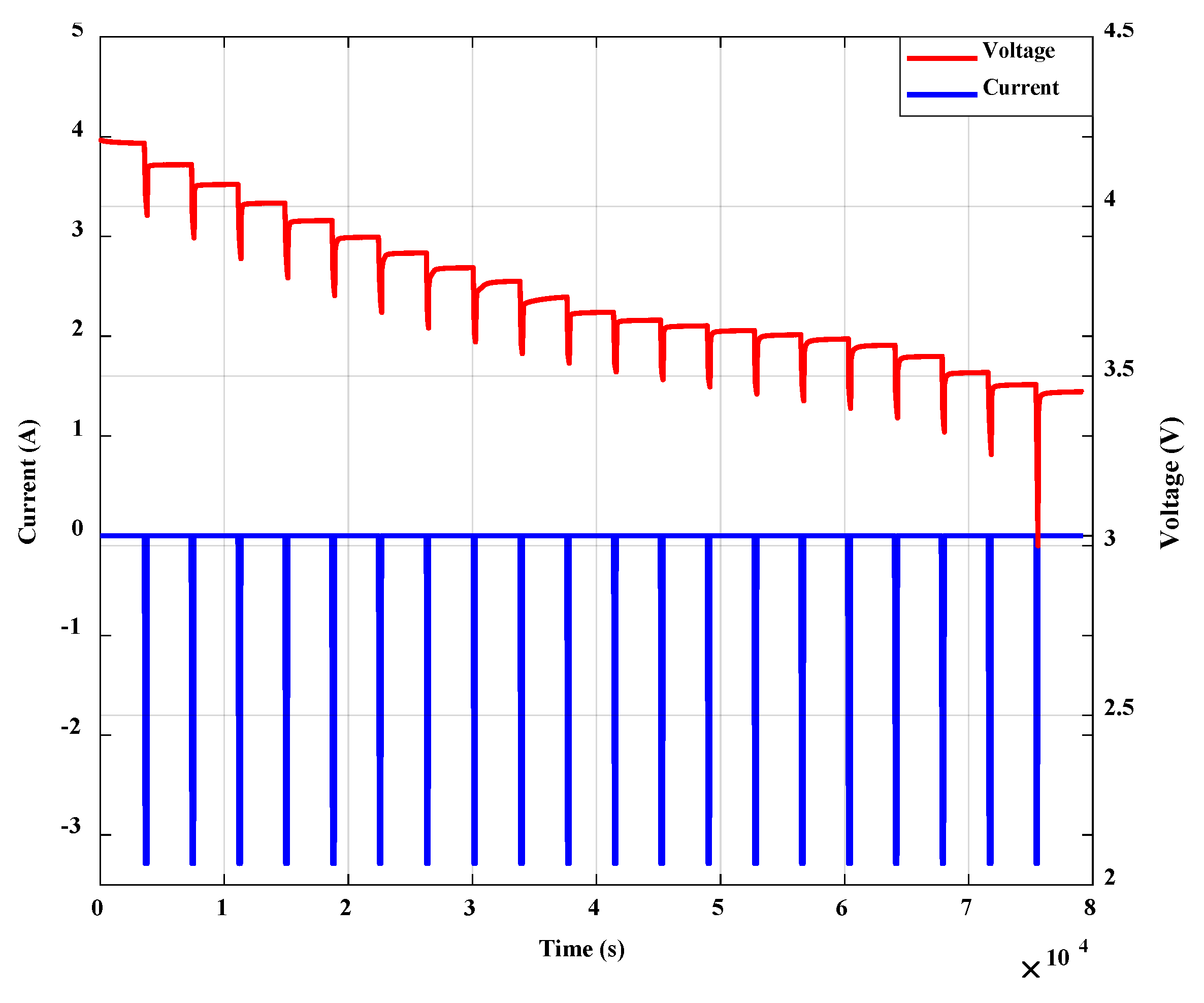
3.1. Experimental Conditions for a Battery Aging Test
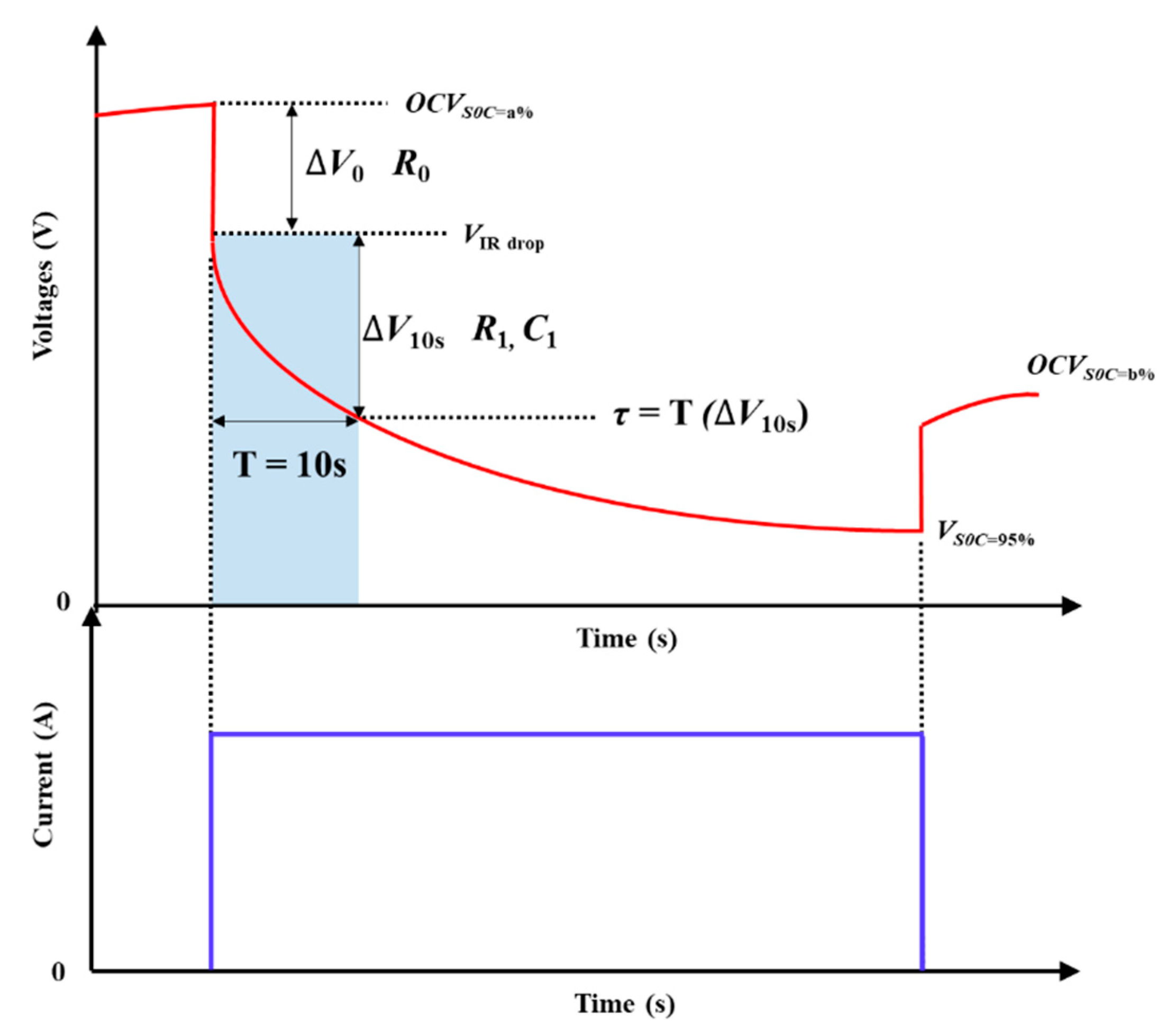
3.2. Parameter Definition and Identification
3.2.1. Battery Equivalent Circuit Model
3.2.2. Multiple Adaptive Forgetting Factor-Recursive Least Square (MAFF-RLS) Algorithm
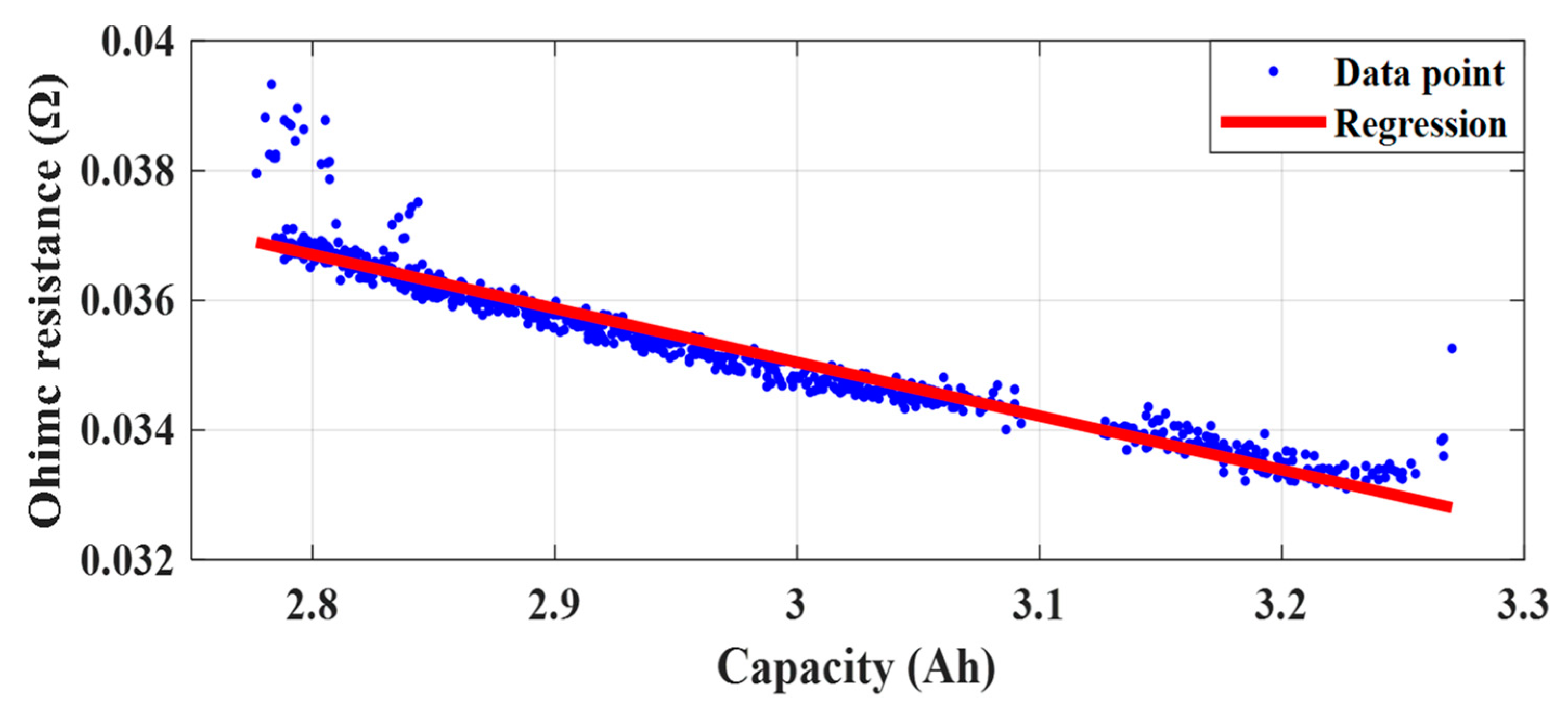
3.2.3. Parameter Estimation Results and Relationship with Capacity
3.3. Dual Extended Kalman Filter
3.3.1. SOC Estimation
3.3.2. Capacity Identification
- Initial value setting and adjustment: According to the measured voltage and SOC-OCV relationship, the initial values of the system variables (OCV0, H0, and P0) are automatically determined. The OCV is applied to the ECM and the initial value of the Hk is calculated using the SOC-OCV curve based on the experimental data, as shown in Figure 6. According to the OCV-SOC curve for the initial condition, the error covariance () is approximated as follows.where SOCtable(OCVtable) represents the SOC-OCV relationship extracted from the experimental data, and represents the initial SOC.
- Adaptive model: In the adaptive battery model, the ohmic resistance, diffusion resistance, and OCV are estimated via MAFF-RLS. According to the estimated parameter, the adaptive ECM estimates the terminal voltage, , and for calculating the Kalman gain. The estimated terminal voltage is applied to the proposed DEKF through an ECM error with the measured terminal voltage.
- SOC and capacity estimation: The DEKF estimates the SOC and capacity in parallel structure, as shown in Figure 10.
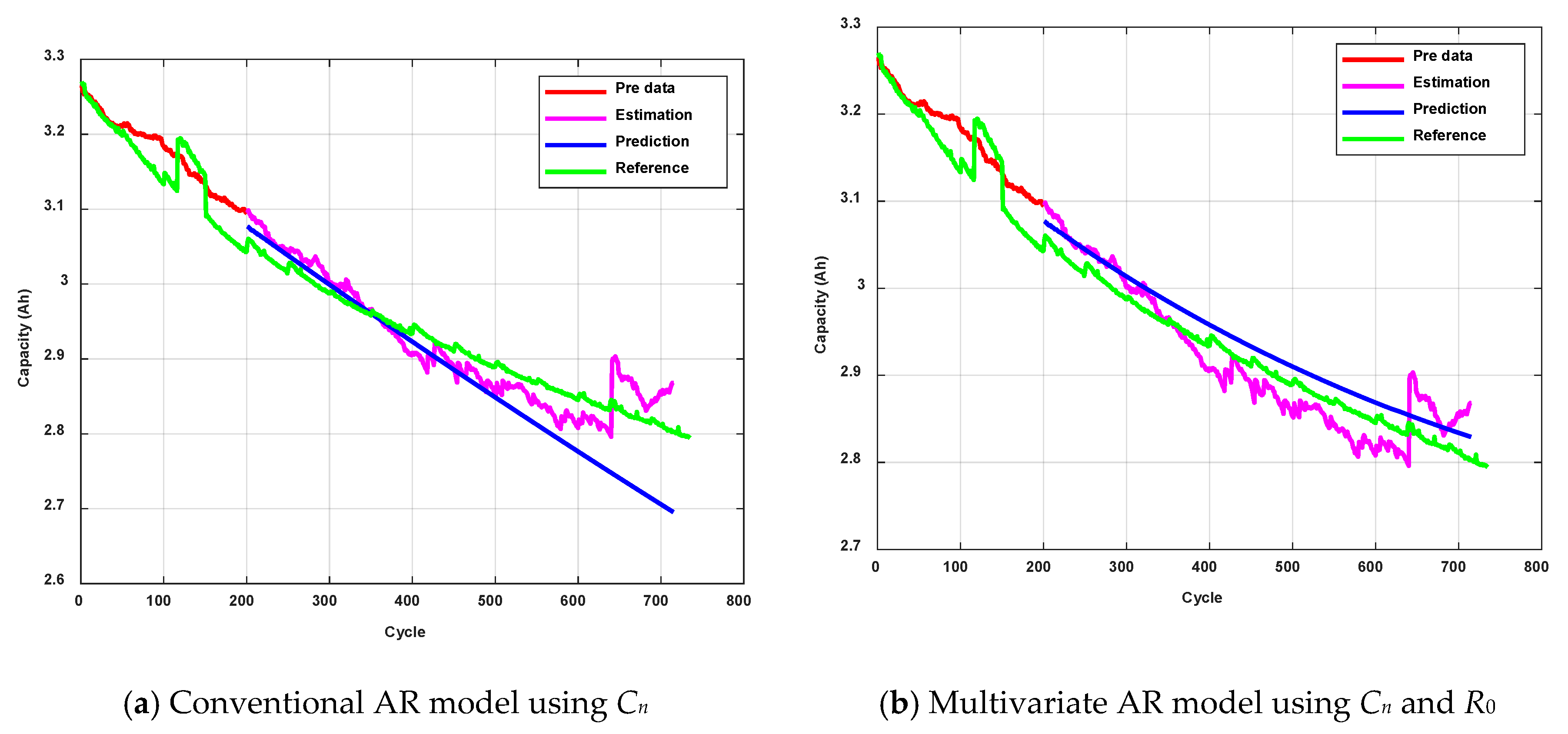
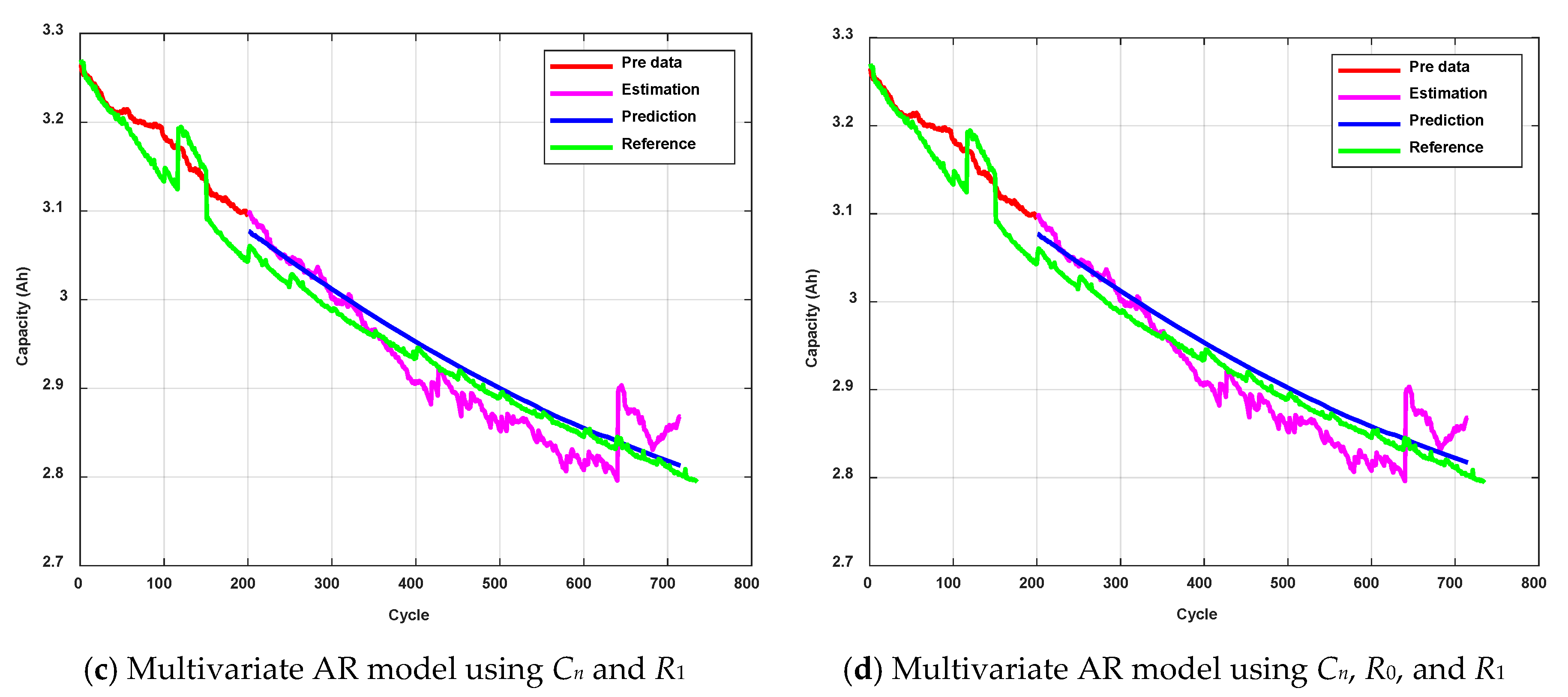
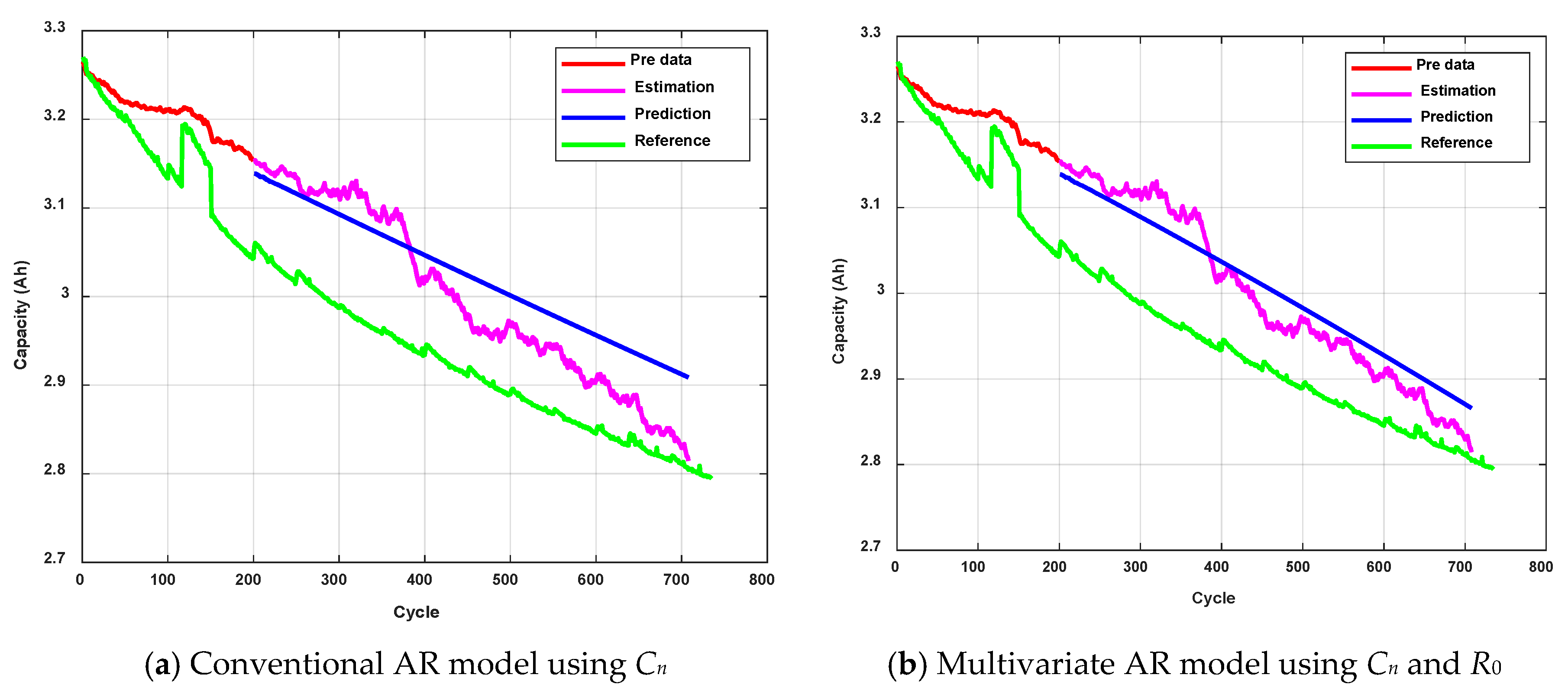
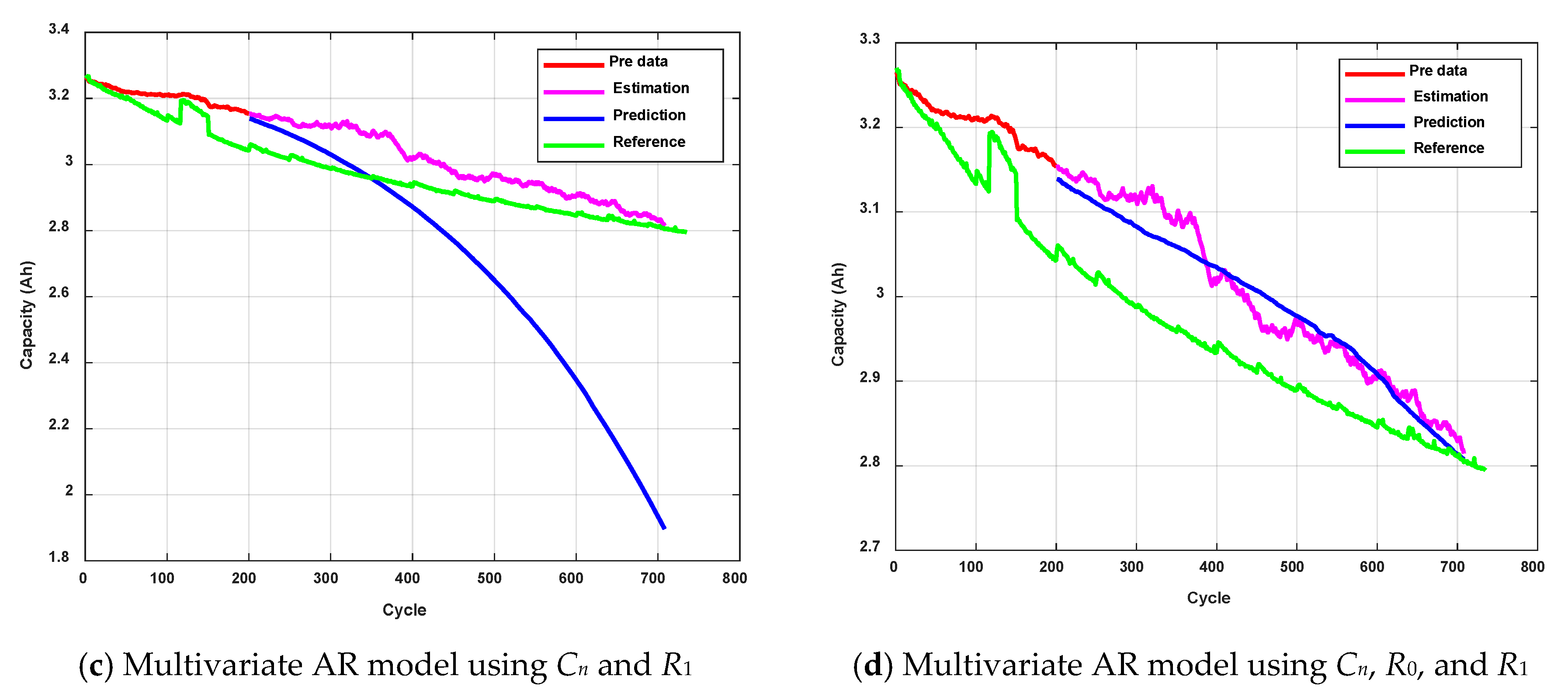
3.4. Autoregressive (AR) Model
3.5. Integrated Model
4. Results and Discussion
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| AR | Autoregressive |
| ARX | Autoregressive Exogenous |
| BMS | Battery Management System |
| DEKF | Dual Extended Kalman Filter |
| DOD | Depth of Discharge |
| ECM | Equivalent Circuit Model |
| EIS | Electrochemical Impedance Spectroscopy |
| EKF | Extended Kalman Filter |
| ESS | Energy Storage System |
| HI | Health Indicator |
| MAFF | Multiple Adaptive Forgetting Factor |
| MAPE | Mean Absolute Percentage Error |
| NMC | Nickel Manganese Cobalt Oxide |
| OCV | Open Circuit Voltage |
| PCA | Pearson Correlation Analysis |
| RLS | Recursive Least Square |
| RUL | Remaining Useful Life |
| SEI | Solid–Electrolyte Interphase |
| SOC | State of Charge |
| SOH | State of Health |
| SRC | Spearman Rank Correlation |
References
- IRENA. Electricity Storage and Renewables: Costs and Markets to 2030; International Renewable Energy Agency: Abu Dhabi, United Arab Emirates, 2017. [Google Scholar]
- International Renewable Energy Agency (IRENA). Global Energy Transformation: A Roadmap to 2050, 2019 ed.; IRENA: Abu Dhabi, United Arab Emirates, 2019. [Google Scholar]
- Mauger, A.; Julien, C.M.; Paolella, A.; Armand, M.; Zaghib, K. Building better batteries in the solid state: A review. Materials 2019, 12, 3892. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Bloomberg New Energy Finance. Energy Storage Outlook 2019; Bloomberg New Energy Finance Publication: Paris, France, 2019. [Google Scholar]
- Dunn, B.; Kamath, H.; Tarascon, J.M. Electrical energy storage for the grid: A battery of choices. Science 2011, 334, 928–935. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- World Energy Council. Energy Storage Monitor Latest Trends in Energy Storage; World Energy Council: London, UK, 2019; p. 15. [Google Scholar]
- Bloomberg New Energy Finance. Available online: https://about.bnef.com/blog/behind-scenes-take-lithium-ion-battery-prices/ (accessed on 5 May 2019).
- Ren, H.; Zhao, Y.; Chen, S.; Wang, T. Design and implementation of a battery management system with active charge balance based on the SOC and SOH online estimation. Energy 2019, 166, 908–917. [Google Scholar] [CrossRef]
- Garche, J.; Karden, E.; Moseley, P.T.; Rand, D.A. (Eds.) Lead-Acid Batteries for Future Automobiles; Elsevier: Amsterdam, The Netherlands, 2017; pp. 133–146. [Google Scholar]
- Kwiecien, M.; Schröer, P.; Kuipers, M.; Sauer, D.U. Current research topics for lead–acid batteries. In Lead-Acid Batteries for Future Automobiles; Elsevier: Amsterdam, The Netherlands, 2017; pp. 133–146. [Google Scholar]
- Wu, J.; Wang, Y.; Zhang, X.; Chen, Z. A novel state of health estimation method of Li-ion battery using group method of data handling. J. Power Sources 2016, 327, 457–464. [Google Scholar] [CrossRef]
- Wu, J.; Zhang, C.; Chen, Z. An online method for lithium-ion battery remaining useful life estimation using importance sampling and neural networks. Appl. Energy 2016, 173, 134–140. [Google Scholar] [CrossRef]
- Kang, B.O.; Lee, M.; Kim, Y.; Jung, J. Economic analysis of a customer-installed energy storage system for both self-saving operation and demand response program participation in South Korea. Renew. Sustain. Energy Rev. 2018, 94, 69–83. [Google Scholar] [CrossRef]
- Gruber, P.W.; Medina, P.A.; Keoleian, G.A.; Kesler, S.E.; Everson, M.P.; Wallington, T.J. Global lithium availability: A constraint for electric vehicles? J. Ind. Ecol. 2011, 15, 760–775. [Google Scholar] [CrossRef]
- Lucu, M.; Martinez-Laserna, E.; Gandiaga, I.; Camblong, H. A critical review on self-adaptive Li-ion battery ageing models. J. Power Sources 2018, 401, 85–101. [Google Scholar] [CrossRef]
- Maheshwari, A.; Paterakis, N.G.; Santarelli, M.; Gibescu, M. Optimizing the operation of energy storage using a non-linear lithium-ion battery degradation model. Appl. Energy 2020, 261, 114360. [Google Scholar] [CrossRef]
- Sun, Y.; Hao, X.; Pecht, M.; Zhou, Y. Remaining useful life prediction for lithium-ion batteries based on an integrated health indicator. Microelectron. Reliab. 2018, 88, 1189–1194. [Google Scholar] [CrossRef]
- Xiong, R.; Zhang, Y.; Wang, J.; He, H.; Peng, S.; Pecht, M. Lithium-ion battery health prognosis based on a real battery management system used in electric vehicles. IEEE Trans. Veh. Technol. 2018, 68, 4110–4121. [Google Scholar] [CrossRef]
- Zheng, Y.; Qin, C.; Lai, X.; Han, X.; Xie, Y. A novel capacity estimation method for lithium-ion batteries using fusion estimation of charging curve sections and discrete Arrhenius aging model. Appl. Energy 2019, 251, 113327. [Google Scholar] [CrossRef]
- Liu, D.; Zhou, J.; Liao, H.; Peng, Y.; Peng, X. A health indicator extraction and optimization framework for lithium-ion battery degradation modeling and prognostics. IEEE Trans. Syst. Man Cyber. Syst. 2015, 45, 915–928. [Google Scholar]
- Zhou, Y.; Huang, M.; Chen, Y.; Tao, Y. A novel health indicator for on-line lithium-ion batteries remaining useful life prediction. J. Power Sources 2016, 321, 1–10. [Google Scholar] [CrossRef]
- Verma, P.; Maire, P.; Novák, P. A review of the features and analyses of the solid electrolyte interphase in Li-ion batteries. Electrochim. Acta 2010, 55, 6332–6341. [Google Scholar] [CrossRef]
- Jung, B.; Lee, B.; Jeong, Y.C.; Lee, J.; Yang, S.R.; Kim, H.; Park, M. Thermally stable non-aqueous ceramic-coated separators with enhanced nail penetration performance. J. Power Sources 2019, 427, 271–282. [Google Scholar] [CrossRef]
- Sarkar, A.; Shrotriya, P.; Chandra, A.; Hu, C. Chemo-economic analysis of battery aging and capacity fade in lithium-ion battery. J. Energy Storage 2019, 25, 100911. [Google Scholar] [CrossRef]
- Krewer, U.; Röder, F.; Harinath, E.; Braatz, R.D.; Bedürftig, B.; Findeisen, R. dynamic models of Li-Ion batteries for diagnosis and operation: A review and perspective. J. Electrochem. Soc. 2018, 165, A3656–A3673. [Google Scholar] [CrossRef]
- Pastor-Fernández, C.; Uddin, K.; Chouchelamane, G.H.; Widanage, W.D.; Marco, J. A comparison between electrochemical impedance spectroscopy and incremental capacity-differential voltage as Li-ion diagnostic techniques to identify and quantify the effects of degradation modes within battery management systems. J. Power Sources 2017, 360, 301–318. [Google Scholar] [CrossRef]
- Gomez, J.; Nelson, R.; Kalu, E.E.; Weatherspoon, M.H.; Zheng, J.P. Equivalent circuit model parameters of a high-power Li-ion battery: Thermal and state of charge effects. J. Power Sources 2011, 196, 4826–4831. [Google Scholar] [CrossRef]
- Pan, H.; Lü, Z.; Wang, H.; Wei, H.; Chen, L. Novel battery state-of-health online estimation method using multiple health indicators and an extreme learning machine. Energy 2018, 160, 466–477. [Google Scholar] [CrossRef]
- Qiu, X.; Wu, W.; Wang, S. Remaining useful life prediction of lithium-ion battery based on improved cuckoo search particle filter and a novel state of charge estimation method. J. Power Sources 2020, 450, 227700. [Google Scholar] [CrossRef]
- Xue, Z.; Zhang, Y.; Cheng, C.; Ma, G. Remaining useful life prediction of lithium-ion batteries with adaptive unscented kalman filter and optimized support vector regression. Neurocomputing 2020, 376, 95–102. [Google Scholar] [CrossRef]
- Yang, F.; Wang, D.; Zhao, Y.; Tsui, K.L.; Bae, S.J. A study of the relationship between coulombic efficiency and capacity degradation of commercial lithium-ion batteries. Energy 2018, 145, 486–495. [Google Scholar] [CrossRef]
- Duong, V.H.; Bastawrous, H.A.; Lim, K.; See, K.W.; Zhang, P.; Dou, S.X. Online state of charge and model parameters estimation of the LiFePO4 battery in electric vehicles using multiple adaptive forgetting factors recursive least-squares. J. Power Sources 2015, 296, 215–224. [Google Scholar] [CrossRef]
- Zilberman, I.; Ludwig, S.; Jossen, A. Cell-to-cell variation of calendar aging and reversible self-discharge in 18650 nickel-rich, silicon–graphite lithium-ion cells. J. Energy Storage 2019, 26, 100900. [Google Scholar] [CrossRef]
- Wassiliadis, N.; Adermann, J.; Frericks, A.; Pak, M.; Reiter, C.; Lohmann, B.; Lienkamp, M. Revisiting the dual extended Kalman filter for battery state-of-charge and state-of-health estimation: A use-case life cycle analysis. J. Energy Storage 2018, 19, 73–87. [Google Scholar] [CrossRef]
- Plett, G.L. Extended Kalman filtering for battery management systems of LiPB-based HEV battery packs: Part 3. State and parameter estimation. J. Power Sources 2004, 134, 277–292. [Google Scholar] [CrossRef]
- Long, B.; Xian, W.; Jiang, L.; Liu, Z. An improved autoregressive model by particle swarm optimization for prognostics of lithium-ion batteries. Microelectron. Reliab. 2013, 53, 821–831. [Google Scholar] [CrossRef]
- Liu, D.; Luo, Y.; Peng, Y.; Peng, X.; Pecht, M. Lithium-ion battery remaining useful life estimation based on nonlinear AR model combined with degradation feature. In Proceedings of the Annual Conference of the Prognostics and Health Management Society, Minneapolis, MN, USA, 23–27 September 2012; Volume 3, pp. 1803–1836. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Item | Specification |
|---|---|
| Battery type | INR 21700 (LiNiMnCoO2) |
| Standard discharge capacity | 3.3 Ah |
| Nominal voltage | 3.56 V |
| Charging method | 4.2 V Constant voltage and constant current (CC: 3.3 A CV: 4.2 V cut-off current: 0.05C) |
| Discharge method | Constant current (CC: 3.3 A) |
| C-rate | 1C-rate: 3.3 A |
| Cn and R0 | Cn and R1 | |
|---|---|---|
| Pearson correlation analysis (PCA) | −0.9783 | −0.8517 |
| Spearman rank correlation (SRC) | −0.9895 | −0.9391 |
| Cn | Cn + R0 | Cn + R1 | Cn + R0 + R1 | |
|---|---|---|---|---|
| Experiment (%) | 4.4006 | 1.0606 | 0.5324 | 0.4165 |
| Case 1 (%) | 1.4518 | 0.7302 | 0.4566 | 0.5183 |
| Case 2 (%) | 3.6067 | 3.0266 | 9.3908 | 2.5599 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Park, J.; Lee, M.; Kim, G.; Park, S.; Kim, J. Integrated Approach Based on Dual Extended Kalman Filter and Multivariate Autoregressive Model for Predicting Battery Capacity Using Health Indicator and SOC/SOH. Energies 2020, 13, 2138. https://doi.org/10.3390/en13092138
Park J, Lee M, Kim G, Park S, Kim J. Integrated Approach Based on Dual Extended Kalman Filter and Multivariate Autoregressive Model for Predicting Battery Capacity Using Health Indicator and SOC/SOH. Energies. 2020; 13(9):2138. https://doi.org/10.3390/en13092138
Chicago/Turabian StylePark, Jinhyeong, Munsu Lee, Gunwoo Kim, Seongyun Park, and Jonghoon Kim. 2020. "Integrated Approach Based on Dual Extended Kalman Filter and Multivariate Autoregressive Model for Predicting Battery Capacity Using Health Indicator and SOC/SOH" Energies 13, no. 9: 2138. https://doi.org/10.3390/en13092138